Автоматично керована зернозбиральна машина


Формула / Реферат
1. Автоматично керована зернозбиральна машина, що має саморухомий транспортний засіб, встановлений на ньому зрізувальний апарат жатки, пристрій визначення місцеположення для дослідження краю ділянки зібраного врожаю, зокрема межі між викошеним та невикошеним урожаєм, для формування сигналів визначення місцеположення, а також систему автоматичного регулювання, що містить регулятор для обробки сигналів визначення і формування сигналів управління, яка відрізняється тим, що пристрій визначення місцеположення виконаний з можливістю дослідження ділянки зібраного врожаю щонайменше на двох різних відстанях перед зрізувальним апаратом жатки, а регулятор виконаний з можливістю обробки щонайменше двох сигналів визначення місцеположення, кожний з яких реферовано для відповідних відстаней досліджень перед зрізувальним апаратом жатки.
2. Автоматично керована зернозбиральна машина за п. 1, яка відрізняється тим, що регулятор виконано з можливістю визначення щонайменше з двох реферованих на різних відстанях досліджень перед зрізувальним апаратом жатки сигналів визначення місцеположення куту напряму між поздовжньою віссю зернозбиральної машини і краєм ділянки зібраного врожаю і/або відстані між лівим та правим обмежувальним краєм зрізувального апарата жатки і краєм ділянки зібраного врожаю і встановлені таким чином кут напряму і/або відстань між обмежувальними краями зрізувального апарата жатки і краєм ділянки зібраного врожаю служать для формування сигналів управління
3. Автоматично керована зернозбиральна машина за одним з пунктів 1 або 2, яка відрізняється тим, що вона має щонайменше два пристрої визначення місцеположення для дослідження краю ділянки зібраного врожаю, причому пристрої визначення місцеположення призначені для дослідження краю ділянки зібраного врожаю відповідно на одній з різних відстаней перед зрізувальним апаратом жатки.
4. Автоматично керована зернозбиральна машина за пунктом 3, яка відрізняється тим, що перший пристрій визначення місцеположення виконано безконтактне працюючим з променями визначення місцеположення відбивним пристроєм визначення місцеположення, який розміщений вище ділянки зібраного врожаю і промені визначення місцеположення якого проходять вперед трохи під нахилом до ґрунту, причому промені визначення місцеположення проходять по обидва боки досліджуваного краю ділянки зібраного врожаю та досліджують краї ділянки зібраного врожаю на відстані в межах між 3 м і 15 м перед зрізувальним апаратом жатки, переважно між 8 м і 10 м.
5. Автоматично керована зернозбиральна машина за пунктом 4, яка відрізняється тим, що перший пристрій визначення місцеположення є лазерним сканером з пристроями для прийому-передачі лазерного променя, причому лазерні промені виконано з можливістю періодичного завертання в певному діапазоні кута.
6. Автоматично керована зернозбиральна машина за пунктом 4, яка відрізняється тим, що перший пристрій визначення місцеположення є ультразвуковим сенсором з пристроями для прийому-передачі лазерного променя.
7. Автоматично керована зернозбиральна машина за одним з пунктів 3-6, яка відрізняється тим, що перший пристрій визначення місцеположення закріплено на зрізувальному апараті.
8. Автоматично керована зернозбиральна машина за пунктом 7, яка відрізняється тим, що перший пристрій визначення місцеположення розміщено безпосередньо на лівому або правому обмежувальному краю зрізу вального апарата жатки.
9. Автоматично керована зернозбиральна машина за одним з пунктів 3-6, яка відрізняється тим, що перший пристрій визначення місцеположення розміщено на саморухомому транспортному засобі.
10. Автоматично керована зернозбиральна машина за одним з пунктів 3-9, яка відрізняється тим, що другий пристрій визначення місцеположення виконаний таким що досліджує краї ділянки зібраного врожаю в зоні дії зрізувального апарата жатки на правому обмежувальному краю зрізувального апарата жатки.
11. Автоматично керована зернозбиральна машина за пунктом 10, яка відрізняється тим, що другий пристрій визначення місцеположення розміщено на лівому або відповідно правому обмежувальному краю зрізувального апарата жатки та призначено для дослідження відстані між обмежувальним краєм зрізувального апарата жатки і краєм ділянки зібраного врожаю.
12. Автоматично керована зернозбиральна машина за одним з пунктів 10 або 11, яка відрізняється тим, що другий пристрій визначення місцеположення є ультразвуковим сенсором з пристроями для прийому-передачі лазерного променя.
13. Автоматично керована зернозбиральна машина за одним з пунктів 10 або 11, яка відрізняється тим, що другий пристрій визначення місцеположення є скобою-копіром, що виконано з можливістю механічного відхилення по відношенню до краю ділянки зібраного врожаю та виміру цього відхилення.
14. Автоматично керована зернозбиральна машина за одним з пунктів 11-13, яка відрізняється тим, що другий пристрій визначення місцеположення виконано з можливістю додаткової подачі сигналу для завантаження зрізувального апарата жатки.
15. Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що вона має пристрій визначення місцеположення, який встановлено з можливістю розвертання навколо горизонтальної осі, причому пристрій визначення місцеположення в залежності від кута повороту виконано таким, що досліджує край ділянки зібраного врожаю на іншій відстані перед зрізувальним апаратом жатки.
16. Автоматично керована зернозбиральна машина за пунктом 15, яка відрізняється тим, що пристрій визначення місцеположення для ближнього та дальнього дослідження краю ділянки зібраного врожаю відрегульовано на два кути повороту.
17. Автоматично керована зернозбиральна машина за пунктом 15, яка відрізняється тим, що пристрій визначення місцеположення є ступінчасто поворотним, який пристосовано для ступінчастого дослідження краю ділянки зібраного врожаю в діапазоні відстаней перед зрізу вальним апаратом жатки.
18. Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пристрій визначення місцеположення виконано у вигляді цифрової камери, яка розміщена вище ділянки врожаю, що збирається, та закріплена похило вперед до ґрунту, причому зона фотографування камери, що знаходиться перед зрізувальним апаратом жатки, оцінюється з метою дослідження краю ділянки зібраного врожаю за допомогою цифрової обробки зображення.
19. Автоматично керована зернозбиральна машина за пунктом 18, яка відрізняється тим, що край ділянки зібраного врожаю визначено в одній точці в зоні фотографування камери і положення цієї точки використане як сигнал визначення місцеположення.
20. Автоматично керована зернозбиральна машина за пунктом 18, яка відрізняється тим, що проходження краю ділянки зібраного врожаю визначене в зоні фотографування камери за кількома точками і ці точки використовуються як сигнал визначення місцеположення.
21. Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що досліджувані під час руху за допомогою щонайменше одного з двох пристроїв визначення місцеположення сигнали позиції краю ділянки зібраного врожаю додатково безперервно фіксовані в запам'ятовуючому пристрої для визначення проходження краю ділянки зібраного врожаю і це проходження краю ділянки зібраного врожаю обробляється регулятором системи автоматичного управління.
22. Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що вона має додатковий пристрій для усереднення досліджуваного проходження краю ділянки зібраного врожаю відповідно плаваючим одержанням середнього значення через певне тимчасове вікно, вихідний сигнал з якого обробляється регулятором системи автоматичного управління.
Текст
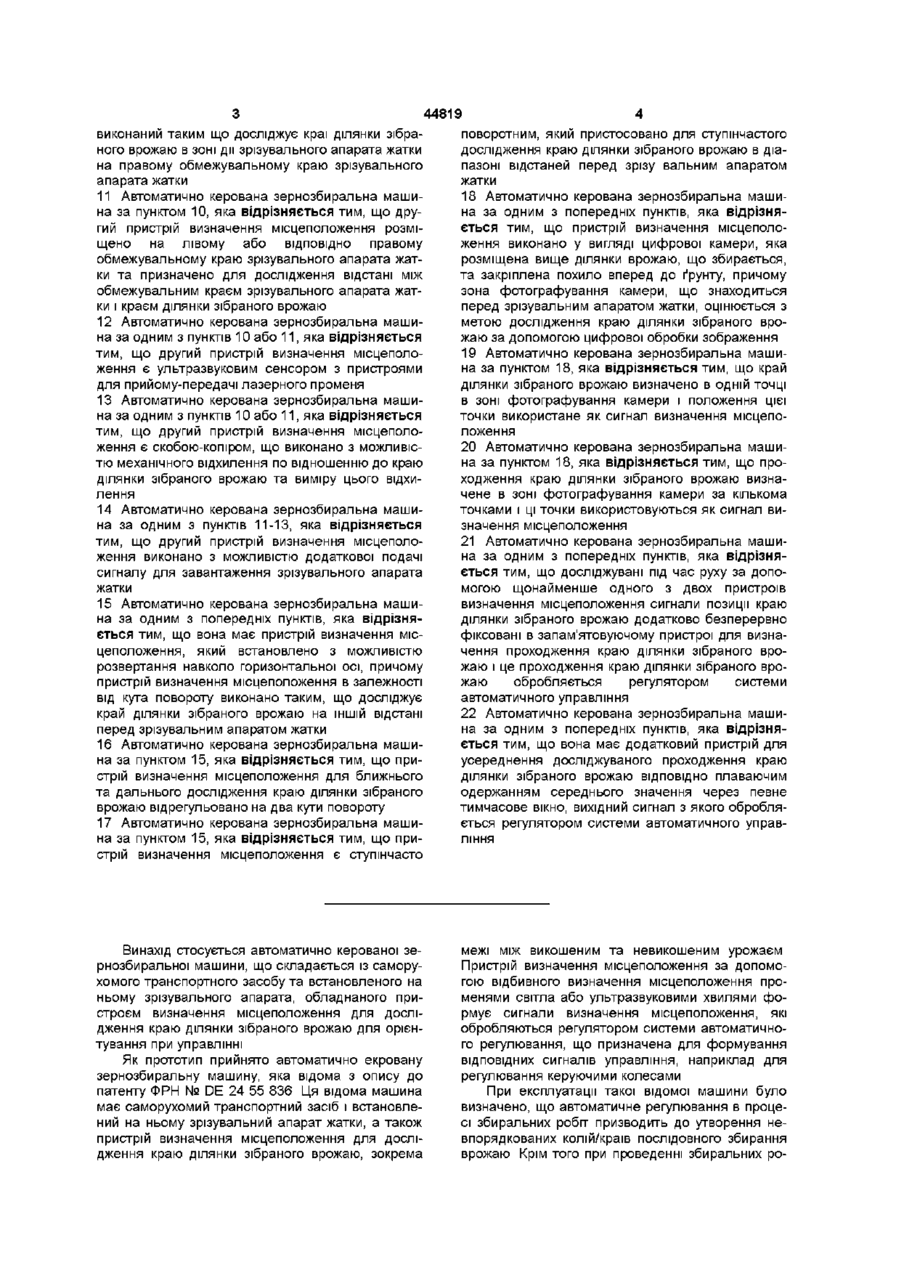
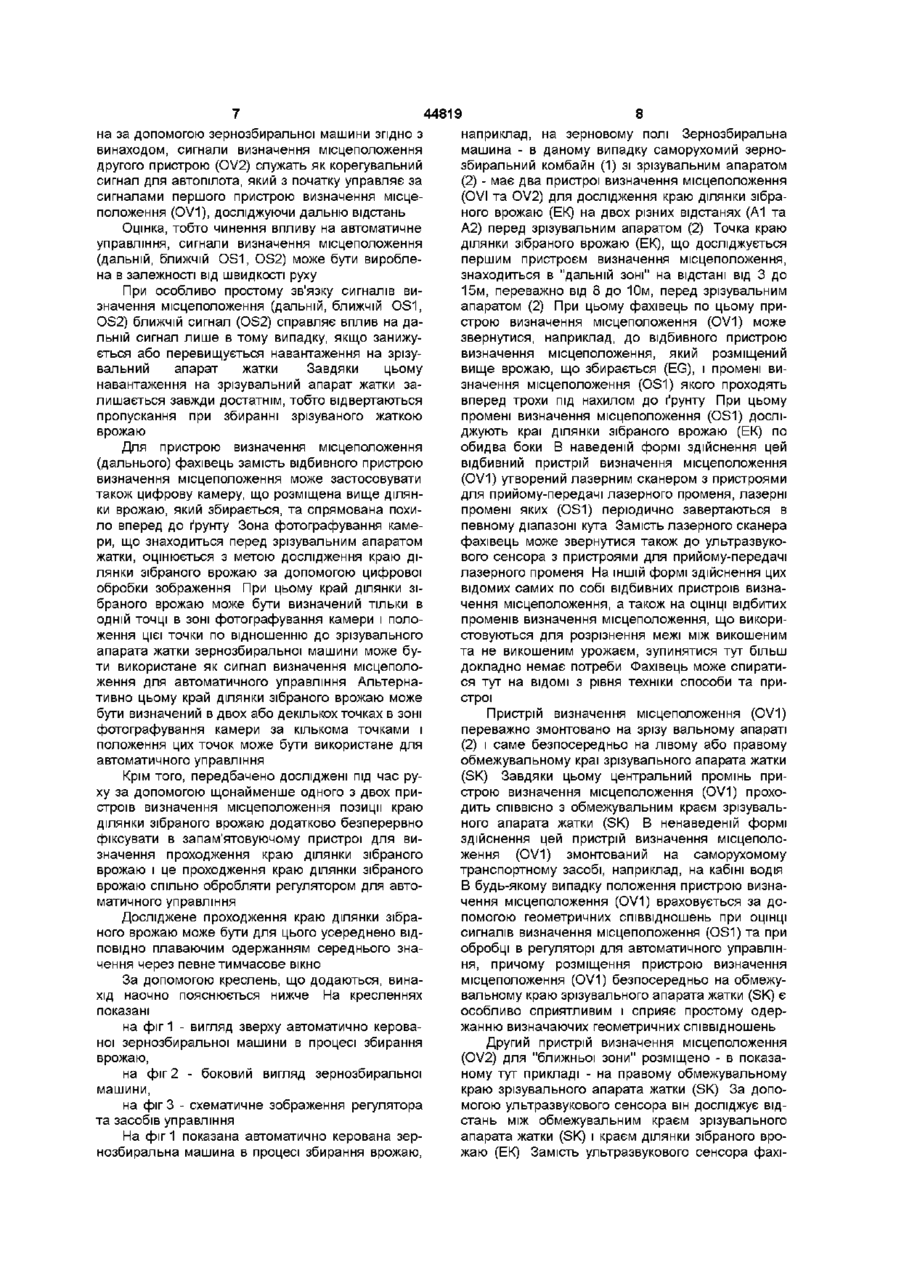
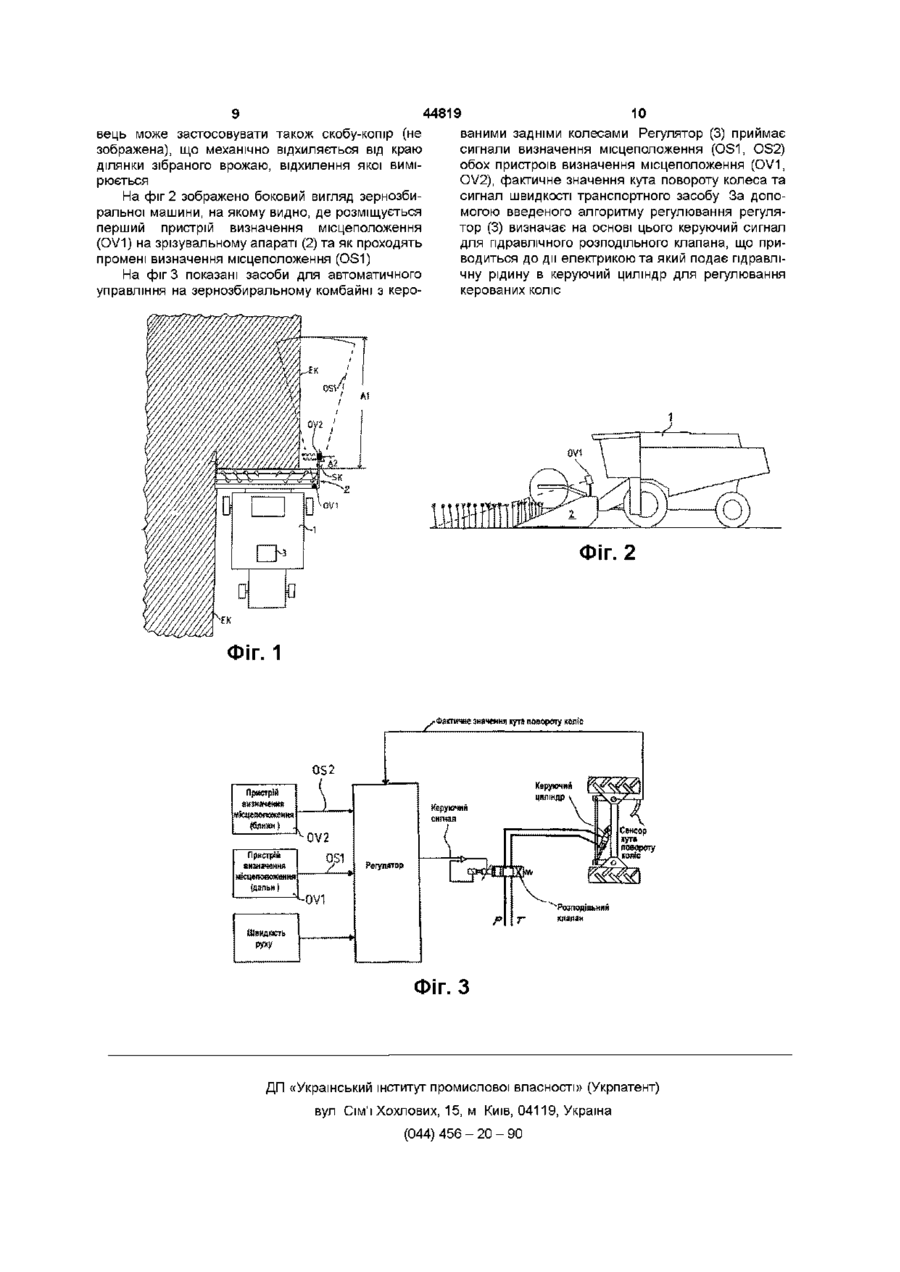
1 Автоматично керована зернозбиральна машина, що має саморухомий транспортний засіб, встановлений на ньому зрізувальний апарат жатки, пристрій визначення місцеположення для дослідження краю ділянки зібраного врожаю, зокрема межі між викошеним та невикошеним урожаєм, для формування сигналів визначення місцеположення, а також систему автоматичного регулювання, що містить регулятор для обробки сигналів визначення і формування сигналів управління, яка відрізняється тим, що пристрій визначення місцеположення виконаний з можливістю дослідження ділянки зібраного врожаю щонайменше на двох різних відстанях перед зрізувальним апаратом жатки, а регулятор виконаний з можливістю обробки щонайменше двох сигналів визначення місцеположення, кожний з яких реферовано для ВІДПОВІДНИХ відстаней досліджень перед зрізувальним апаратом жатки 2 Автоматично керована зернозбиральна машина за п 1, яка відрізняється тим, що регулятор виконано з можливістю визначення щонайменше з двох реферованих на різних відстанях досліджень перед зрізувальним апаратом жатки сигналів визначення місцеположення куту напряму між поздовжньою віссю зернозбиральної машини і краєм ділянки зібраного врожаю і/або відстані між лівим та правим обмежувальним краєм зрізувального апарата жатки і краєм ділянки зібраного врожаю і встановлені таким чином кут напряму і/або відстань між обмежувальними краями зрізувального апарата жатки і краєм ділянки зібраного врожаю служать для формування сигналів управління 3 Автоматично керована зернозбиральна машина за одним з пунктів 1 або 2, яка відрізняється тим, що вона має щонайменше два пристрої визначен ня місцеположення для дослідження краю ділянки зібраного врожаю, причому пристрої визначення місцеположення призначені для дослідження краю ділянки зібраного врожаю ВІДПОВІДНО на одній з різних відстаней перед зрізувальним апаратом жатки 4 Автоматично керована зернозбиральна машина за пунктом 3, яка відрізняється тим, що перший пристрій визначення місцеположення виконано безконтактне працюючим з променями визначення місцеположення відбивним пристроєм визначення місцеположення, який розміщений вище ділянки зібраного врожаю і промені визначення місцеположення якого проходять вперед трохи під нахилом до ґрунту, причому промені визначення місцеположення проходять по обидва боки досліджуваного краю ділянки зібраного врожаю та досліджують краї ділянки зібраного врожаю на відстані в межах між 3 м і 15 м перед зрізувальним апаратом жатки, переважно між 8 м і 10 м 5 Автоматично керована зернозбиральна машина за пунктом 4, яка відрізняється тим, що перший пристрій визначення місцеположення є лазерним сканером з пристроями для прийому-передачі лазерного променя, причому лазерні промені виконано з можливістю періодичного завертання в певному діапазоні кута 6 Автоматично керована зернозбиральна машина за пунктом 4, яка відрізняється тим, що перший пристрій визначення місцеположення є ультразвуковим сенсором з пристроями для прийомупередачі лазерного променя 7 Автоматично керована зернозбиральна машина за одним з пунктів 3-6, яка відрізняється тим, що перший пристрій визначення місцеположення закріплено на зрізувальному апараті 8 Автоматично керована зернозбиральна машина за пунктом 7, яка відрізняється тим, що перший пристрій визначення місцеположення розміщено безпосередньо на лівому або правому обмежувальному краю зрізу вального апарата жатки 9 Автоматично керована зернозбиральна машина за одним з пунктів 3-6, яка відрізняється тим, що перший пристрій визначення місцеположення розміщено на саморухомому транспортному засобі 10 Автоматично керована зернозбиральна машина за одним з пунктів 3-9, яка відрізняється тим, що другий пристрій визначення місцеположення О 00 44819 виконаний таким що досліджує краї ділянки зібраного врожаю в зоні дії зрізувального апарата жатки на правому обмежувальному краю зрізувального апарата жатки 11 Автоматично керована зернозбиральна машина за пунктом 10, яка відрізняється тим, що другий пристрій визначення місцеположення розміщено на лівому або ВІДПОВІДНО правому обмежувальному краю зрізувального апарата жатки та призначено для дослідження відстані між обмежувальним краєм зрізувального апарата жатки і краєм ділянки зібраного врожаю 12 Автоматично керована зернозбиральна машина за одним з пунктів 10 або 11, яка відрізняється тим, що другий пристрій визначення місцеположення є ультразвуковим сенсором з пристроями для прийому-передачі лазерного променя 13 Автоматично керована зернозбиральна машина за одним з пунктів 10 або 11, яка відрізняється тим, що другий пристрій визначення місцеположення є скобою-копіром, що виконано з можливістю механічного відхилення по відношенню до краю ділянки зібраного врожаю та виміру цього відхилення 14 Автоматично керована зернозбиральна машина за одним з пунктів 11-13, яка відрізняється тим, що другий пристрій визначення місцеположення виконано з можливістю додаткової подачі сигналу для завантаження зрізувального апарата жатки 15 Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що вона має пристрій визначення місцеположення, який встановлено з можливістю розвертання навколо горизонтальної осі, причому пристрій визначення місцеположення в залежності від кута повороту виконано таким, що досліджує край ділянки зібраного врожаю на ІНШІЙ відстані перед зрізувальним апаратом жатки 16 Автоматично керована зернозбиральна машина за пунктом 15, яка відрізняється тим, що пристрій визначення місцеположення для ближнього та дальнього дослідження краю ділянки зібраного врожаю відрегульовано на два кути повороту 17 Автоматично керована зернозбиральна машина за пунктом 15, яка відрізняється тим, що пристрій визначення місцеположення є ступінчасто поворотним, який пристосовано для ступінчастого дослідження краю ділянки зібраного врожаю в діапазоні відстаней перед зрізу вальним апаратом жатки 18 Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пристрій визначення місцеположення виконано у вигляді цифрової камери, яка розміщена вище ділянки врожаю, що збирається, та закріплена похило вперед до ґрунту, причому зона фотографування камери, що знаходиться перед зрізувальним апаратом жатки, оцінюється з метою дослідження краю ділянки зібраного врожаю за допомогою цифрової обробки зображення 19 Автоматично керована зернозбиральна машина за пунктом 18, яка відрізняється тим, що край ділянки зібраного врожаю визначено в одній точці в зоні фотографування камери і положення цієї точки використане як сигнал визначення місцеположення 20 Автоматично керована зернозбиральна машина за пунктом 18, яка відрізняється тим, що проходження краю ділянки зібраного врожаю визначене в зоні фотографування камери за кількома точками і ці точки використовуються як сигнал визначення місцеположення 21 Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що досліджувані під час руху за допомогою щонайменше одного з двох пристроїв визначення місцеположення сигнали позиції краю ділянки зібраного врожаю додатково безперервно фіксовані в запам'ятовуючому пристрої для визначення проходження краю ділянки зібраного врожаю і це проходження краю ділянки зібраного врожаю обробляється регулятором системи автоматичного управління 22 Автоматично керована зернозбиральна машина за одним з попередніх пунктів, яка відрізняється тим, що вона має додатковий пристрій для усереднення досліджуваного проходження краю ділянки зібраного врожаю ВІДПОВІДНО плаваючим одержанням середнього значення через певне тимчасове вікно, вихідний сигнал з якого обробляється регулятором системи автоматичного управління Винахід стосується автоматично керованої зернозбиральної машини, що складається із саморухомого транспортного засобу та встановленого на ньому зрізувального апарата, обладнаного пристроєм визначення місцеположення для дослідження краю ділянки зібраного врожаю для орієнтування при управлінні Як прототип прийнято автоматично екровану зернозбиральну машину, яка відома з опису до патенту ФРН № DE 24 55 836 Ця відома машина має саморухомий транспортний засіб і встановлений на ньому зрізувальний апарат жатки, а також пристрій визначення місцеположення для дослідження краю ділянки зібраного врожаю, зокрема межі між викошеним та невикошеним урожаєм Пристрій визначення місцеположення за допомогою відбивного визначення місцеположення променями світла або ультразвуковими хвилями формує сигнали визначення місцеположення, які обробляються регулятором системи автоматичного регулювання, що призначена для формування ВІДПОВІДНИХ сигналів управління, наприклад для регулювання керуючими колесами При експлуатації такої відомої машини було визначено, що автоматичне регулювання в процесі збиральних робіт призводить до утворення невпорядкованих колій/країв послідовного збирання врожаю Крім того при проведенні збиральних ро 44819 біт на схилах промені світла або ультразвукові зно прямолінійно, і поздовжньою віссю За цієї волни недостатньо захищені від вітру У наслідок стратегії управління поздовжня вісь зернозбирачого суттєво знижується як стабільність так і нальної машини проходить паралельно краю ділянки дійність роботи зернозбиральної машини зібраного врожаю, тобто система регулювання намагається мінімізувати вказаний вище кут наВ основу винаходу було покладено задачу пряму ВІДПОВІДНО до нуля створити таку автоматично керовану зернозбиральну машину, у якій завдяки застосуванню в приКрім того при застосуванні двох або декількох строї визначення місцеположення щонайменше реферованих для різноманітних відстаней дослідвох сигналів для дослідження ділянки зібраного джень перед зрізувальним апаратом жатки сигнаврожаю для різних відстаней досліджень перед лів визначення місцеположення можна визначити зрізувальним апаратом жатки, вдалось би підвисивідстань між лівим або правим обмежувальним ти якість автоматичного регулювання і досягти краєм зрізувального апарата жатки і краєм ділянки стабільної та надійної роботи зернозбиральної зібраного врожаю Завдяки цьому можна переважмашини ним чином забезпечити захист від знесення вітром зернозбиральної машини при проведенні збиральЦе завдання вирішується автоматично кероних робіт на схилі, якщо змінюється відстань між ваною зернозбиральною машиною, що має самообмежувальним краєм зрізувального апарата жатрухомий транспортний засіб, встановлений на ки і краєм ділянки зібраного врожаю, тобто відхиньому зрізувальний апарат жатки, пристрій визналяється від заданої справжньої величини (безпеччення місцеположення для дослідження краю діна дистанція), хоча зернозбиральна машина сама лянки зібраного врожаю, зокрема межі між викопо собі рухається правильно вздовж краю ділянки шеним та невикошеним урожаєм, для формування зібраного врожаю сигналів визначення місцеположення, а також систему автоматичного регулювання, що містить реКрім того при застосуванні автоматично керогулятор для обробки сигналів визначення і формуваної зернозбиральної машини згідно з винаходом вання сигналів управління, згідно з винаходом при ВІДПОВІДНІЙ обробці різноманітних сигналів пристрій визначення місцеположення виконаний з визначення місцеположення в регуляторі (наприможливістю дослідження ділянки зібраного вроклад, уведений в м ікро контролер алгоритм) здійсжаю щонайменше на двох різних відстанях перед нюється вирівнювання коли вздовж краю ділянки зрізувальним апаратом жатки, а регулятор викозібраного врожаю наний з можливістю обробки щонайменше двох В переважній формі здійснення винаходу зерсигналів визначення місцеположення, кожний з нозбиральна машина має два пристрої визначеняких реферовано для ВІДПОВІДНИХ відстаней досліня місцеположення для дослідження краю ділянки джень перед зрізувальним апаратом жатки зібраного врожаю на двох різних відстанях, причому один пристрій визначення місцеположення Для автоматичного управління сигнали визнадосліджує край ділянки зібраного врожаю в дальчення місцеположення подаються відомим спосоній зоні, наприклад, на відстані 8 - 10м перед зрібом регулятору (наприклад, електронній схемі або зувальним апаратом жатки, а інший досліджує мікроконтролеру), де вони обробляються Регулякрай ділянки зібраного врожаю в ближчій зоні, тор, який поряд з сигналами визначення місцепобезпосередньо перед або у зоні дії зрізувального ложення набуває відомим способом дійсних знаапарата жатки чень кута повороту керуючих коліс зернозбиральної машини, шляхом звичних для В наступній переважній формі здійснення вифахівця засобів здійснює регулювання керуючих находу зернозбиральна машина має пристрій виколіс Такого роду засобами є, наприклад, гідравзначення місцеположення, який встановлено з лічний керуючий циліндр, який через гідравлічний можливістю розвертання навколо горизонтальної розподільний клапан, що приводиться до дії елекосі, причому пристрій визначення місцеположення трикою, з можливістю регулювання завантажуєтьв залежності від кута повороту досліджує край діся гідравлічною рідиною Винахід не обмежений лянки зібраного врожаю на ІНШІЙ відстані перед сільськогосподарськими машинами з керованими зрізувальним апаратом жатки Тут другий пристрій колесами, а може застосовуватися також і в відвизначення місцеположення може не знадобитися ношенні до сільськогосподарських машин на гусеКрім того передбачено також комбінацію з поничному ходу воротного пристрою визначення місцеположення і другого пристрою визначення місцеположення для В результаті того, що в зернозбиральній мадослідження краю ділянки зібраного врожаю в зоні шині згідно з винаходом регулятор для автоматичдії зрізувального апарата жатки ного управління обробляє два або більше реферованих для різноманітних відстаней досліджень Другий пристрій визначення місцеположення перед зрізувальним апаратом сигнали визначення сконструйований спеціально для визначення відмісцеположення, створено автоматично керовану стані між обмежувальним краєм зрізувального зернозбиральну машину зі стабільно працюючою апарата жатки і краєм ділянки зібраного врожаю системою регулювання, що відрізняється надійним Це може бути використане для визначення та резастосуванням гулювання навантаження зрізувального апарата жатки В поєднанні з комплексним обрахуванням Завдяки двом або більше сигналам визначенврожаю це може бути використане також для виня місцеположення, реферованим для різноманітзначення більш точних масштабів площі і скланих відстаней досліджень перед зрізувальним дення на основі цих даних більш точних карт вроапаратом жатки, можна досить точно визначати жайності кут напряму між краєм ділянки зібраного врожаю, який, як правило, проходить щонайменше приблиВ стратегії управління, яка може бути здійсне на за допомогою зернозбиральної машини згідно з винаходом, сигнали визначення місцеположення другого пристрою (OV2) служать як корегувальний сигнал для автопілота, який з початку управляє за сигналами першого пристрою визначення місцеположення (OV1), досліджуючи дальню відстань Оцінка, тобто чинення впливу на автоматичне управління, сигнали визначення місцеположення (дальній, ближчій OS1, OS2) може бути вироблена в залежності від швидкості руху При особливо простому зв'язку сигналів визначення місцеположення (дальній, ближчій OS1, OS2) ближчій сигнал (OS2) справляє вплив на дальній сигнал лише в тому випадку, якщо занижується або перевищується навантаження на зрізувальний апарат жатки Завдяки цьому навантаження на зрізувальний апарат жатки залишається завжди достатнім, тобто відвертаються пропускання при збиранні зрізуваного жаткою врожаю Для пристрою визначення місцеположення (дальнього) фахівець замість відбивного пристрою визначення місцеположення може застосовувати також цифрову камеру, що розміщена вище ділянки врожаю, який збирається, та спрямована похило вперед до ґрунту Зона фотографування камери, що знаходиться перед зрізувальним апаратом жатки, оцінюється з метою дослідження краю ділянки зібраного врожаю за допомогою цифрової обробки зображення При цьому край ділянки зібраного врожаю може бути визначений тільки в одній точці в зоні фотографування камери і положення цієї точки по відношенню до зрізувального апарата жатки зернозбиральної машини може бути використане як сигнал визначення місцеположення для автоматичного управління Альтернативно цьому край ділянки зібраного врожаю може бути визначений в двох або декількох точках в зоні фотографування камери за кількома точками і положення цих точок може бути використане для автоматичного управління Крім того, передбачено досліджені під час руху за допомогою щонайменше одного з двох пристроїв визначення місцеположення позиції краю ділянки зібраного врожаю додатково безперервно фіксувати в запам'ятовуючому пристрої для визначення проходження краю ділянки зібраного врожаю і це проходження краю ділянки зібраного врожаю спільно обробляти регулятором для автоматичного управління Досліджене проходження краю ділянки зібраного врожаю може бути для цього усереднено ВІДПОВІДНО плаваючим одержанням середнього значення через певне тимчасове вікно За допомогою креслень, що додаються, винахід наочно пояснюється нижче На кресленнях показані на фіг 1 - вигляд зверху автоматично керованої зернозбиральної машини в процесі збирання врожаю, на фіг 2 - боковий вигляд зернозбиральної машини, на фіг 3 - схематичне зображення регулятора та засобів управління На фіг 1 показана автоматично керована зернозбиральна машина в процесі збирання врожаю, 44819 8 наприклад, на зерновому полі Зернозбиральна машина - в даному випадку саморухомий зернозбиральний комбайн (1) зі зрізувальним апаратом (2) - має два пристрої визначення місцеположення (OVI та OV2) для дослідження краю ділянки зібраного врожаю (ЕК) на двох різних відстанях (А1 та А2) перед зрізувальним апаратом (2) Точка краю ділянки зібраного врожаю (ЕК), що досліджується першим пристроєм визначення місцеположення, знаходиться в "дальній зоні" на відстані від 3 до 15м, переважно від 8 до 10м, перед зрізувальним апаратом (2) При цьому фахівець по цьому пристрою визначення місцеположення (OV1) може звернутися, наприклад, до відбивного пристрою визначення місцеположення, який розміщений вище врожаю, що збирається (EG), і промені визначення місцеположення (OS1) якого проходять вперед трохи під нахилом до ґрунту При цьому промені визначення місцеположення (OS1) досліджують краї ділянки зібраного врожаю (ЕК) по обидва боки В наведеній формі здійснення цей відбивний пристрій визначення місцеположення (OV1) утворений лазерним сканером з пристроями для прийому-передачі лазерного променя, лазерні промені яких (OS1) періодично завертаються в певному діапазоні кута Замість лазерного сканера фахівець може звернутися також до ультразвукового сенсора з пристроями для прийому-передачі лазерного променя На ІНШІЙ формі здійснення цих відомих самих по собі відбивних пристроїв визначення місцеположення, а також на ОЦІНЦІ відбитих променів визначення місцеположення, що використовуються для розрізнення межі між викошеним та не викошеним урожаєм, зупинятися тут більш докладно немає потреби Фахівець може спиратися тут на ВІДОМІ з рівня техніки способи та пристрої Пристрій визначення місцеположення (OV1) переважно змонтовано на зрізу вальному апараті (2) і саме безпосередньо на лівому або правому обмежувальному краї зрізувального апарата жатки (SK) Завдяки цьому центральний промінь пристрою визначення місцеположення (OV1) проходить СПІВВІСНО з обмежувальним краєм зрізувального апарата жатки (SK) В ненаведеній формі здійснення цей пристрій визначення місцеположення (OV1) змонтований на саморухомому транспортному засобі, наприклад, на кабіні водія В будь-якому випадку положення пристрою визначення місцеположення (OV1) враховується за допомогою геометричних співвідношень при ОЦІНЦІ сигналів визначення місцеположення (OS1) та при обробці в регуляторі для автоматичного управління, причому розміщення пристрою визначення місцеположення (OV1) безпосередньо на обмежувальному краю зрізувального апарата жатки (SK) є особливо сприятливим і сприяє простому одержанню визначаючих геометричних співвідношень Другий пристрій визначення місцеположення (OV2) для "ближньої зони" розміщено - в показаному тут прикладі - на правому обмежувальному краю зрізувального апарата жатки (SK) За допомогою ультразвукового сенсора він досліджує відстань між обмежувальним краєм зрізувального апарата жатки (SK) і краєм ділянки зібраного врожаю (ЕК) Замість ультразвукового сенсора фахі 44819 вець може застосовувати також скобу-копір (не зображена), що механічно відхиляється від краю ділянки зібраного врожаю, відхилення якої вимірюється На фіг 2 зображено боковий вигляд зернозбиральної машини, на якому видно, де розміщується перший пристрій визначення місцеположення (OV1) на зрізувальному апараті (2) та як проходять промені визначення місцеположення (OS1) На фіг 3 показані засоби для автоматичного управління на зернозбиральному комбайні з керо 10 ваними задніми колесами Регулятор (3) приймає сигнали визначення місцеположення (OS1, OS2) обох пристроїв визначення місцеположення (OV1, OV2), фактичне значення кута повороту колеса та сигнал швидкості транспортного засобу За допомогою введеного алгоритму регулювання регулятор (3) визначає на основі цього керуючий сигнал для гідравлічного розподільного клапана, що приводиться до дії електрикою та який подає гідравлічну рідину в керуючий циліндр для регулювання керованих коліс Фіг. 2 ФІГ. 1 ,-Фаісгичне значення кута повороту коліс OS 2 Керуючий Пристрій циліндр визначення (ближн) 0V2 Пристрій визначення місцеположення (дальн) 0S1 Регулятор Фіг. З ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90
ДивитисяДодаткова інформація
Автори англійськоюDieckhans Norbert Dr
Автори російськоюДикханс Норберт Др
МПК / Мітки
МПК: A01D 41/12
Мітки: машина, зернозбиральна, керована, автоматичної
Код посилання
<a href="https://ua.patents.su/5-44819-avtomatichno-kerovana-zernozbiralna-mashina.html" target="_blank" rel="follow" title="База патентів України">Автоматично керована зернозбиральна машина</a>
Самохідна зернозбиральна машина

Номер патенту: 42702
Опубліковано: 15.11.2001
Автор: Дамманн Йоганнес
МПК: B62D 55/00, A01D 41/02
Мітки: машина, самохідна, зернозбиральна
Формула / Реферат:
1. Самоходная зерноуборочная машина, имеющая шасси, отличающаяся тем, что шасси состоит из двух соединенных полугусениц спереди и одной управляемой полугусеницы сзади.2. Самоходная зерноуборочная машина по п. 1, отличающаяся тем, что задний конец управляемой полугусеницы в направлении движения находится перед концом отдачи разделяющего направления.3. Самоходная зерноуборочная машина по п. 1, отличающаяся тем, что задний конец...
Кукурудзозбиральна машина
Номер патенту: 9296
Опубліковано: 30.09.1996
Автори: Блюммер Валерій Валентинович, Тростяний Микола Якович, Гребенюк Геннадій Іванович, Барановський Павло Петрович
МПК: A01D 45/02
Мітки: кукурудзозбиральна, машина
Формула / Реферат:
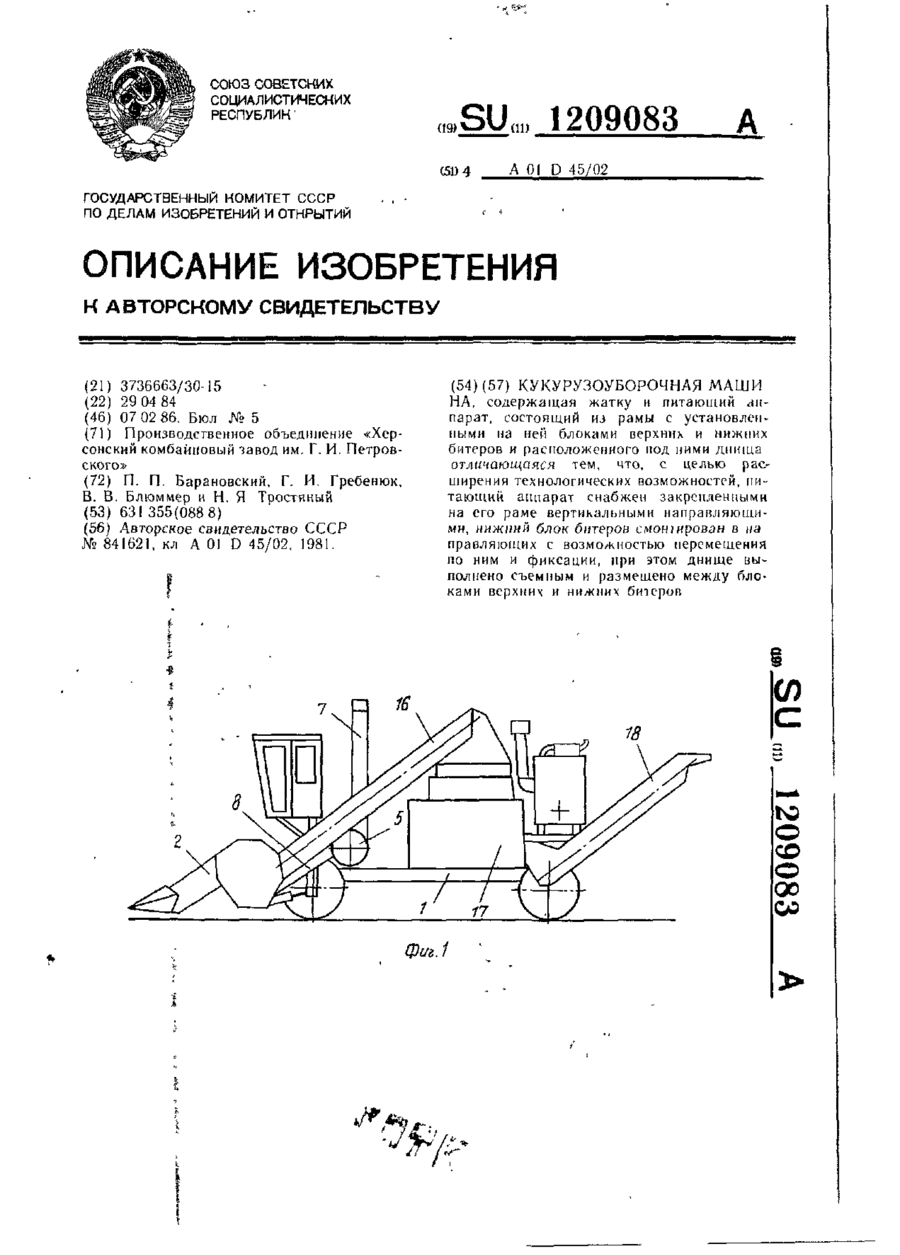
Кукурузоуборочная машина, содержащая жатку и питающий аппарат, состоящий из рамы с установленными на ней блоками верхних и нижних битеров и расположенного под ними днища, отличающаяся тем, что, с целью расширения технологических возможностей, питающий аппарат снабжен закрепленными на его раме вертикальными направляющими, нижний блок битеров смонтирован в направляющих с возможностью перемещения по ним и фиксации, при этом днище выполнено...
Керована форсунка для двигуна внутрішнього згоряння
Номер патенту: 3872
Опубліковано: 27.12.1994
Автори: Ломов Сергій Георгійович, Семенов Володимир Григорович
МПК: F02M 51/08
Мітки: згоряння, керована, двигуна, форсунка, внутрішнього
Формула / Реферат:
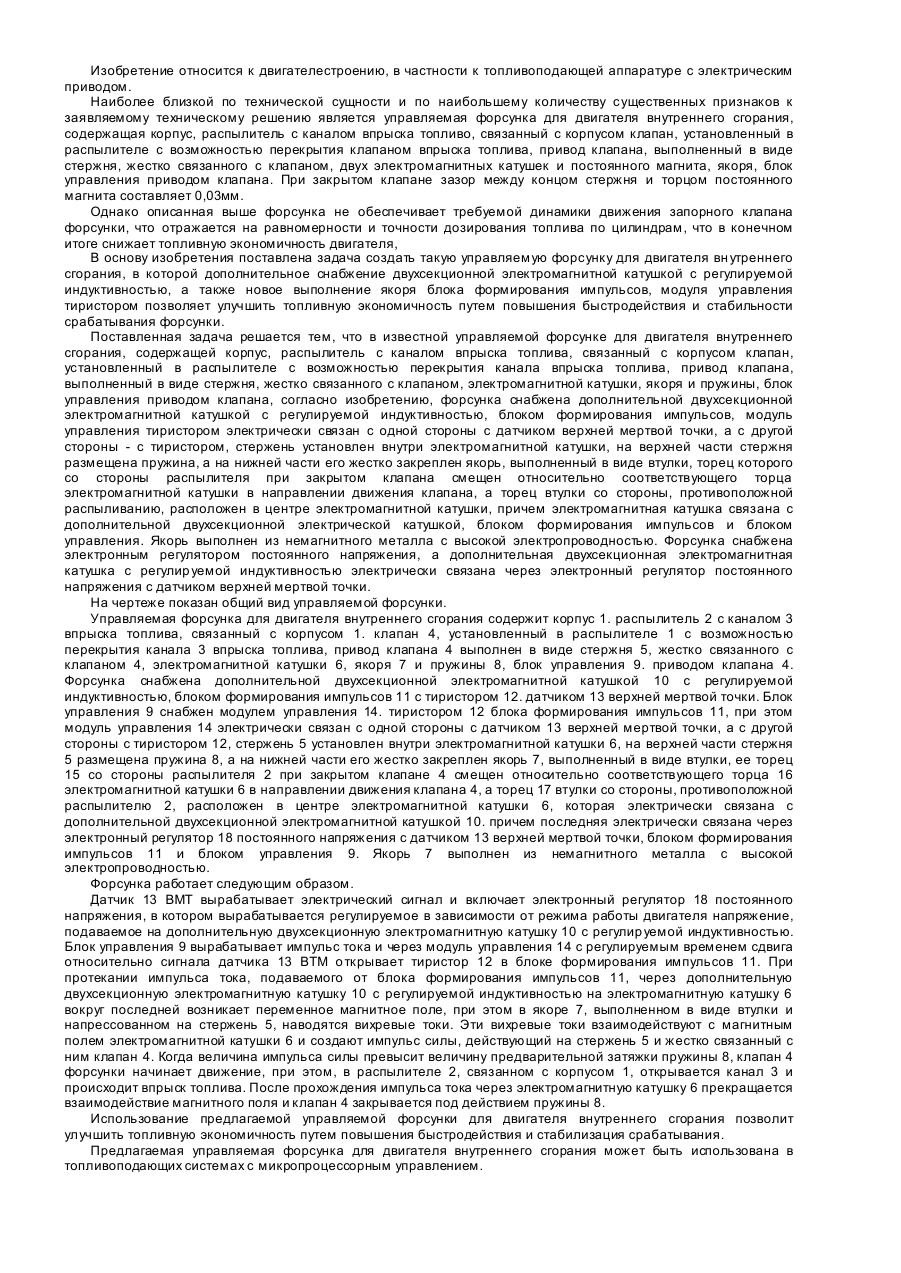
1. Управляемая форсунка для двигателя внутреннего сгорания, содержащая корпус, распылитель с каналом впрыска топлива, связанный с корпусом, клапан, установленный в распылителе с возможностью перекрытия канала впрыска топлива, привод клапана, выполненный в виде стержня, жестко связанного с клапаном, электромагнитной катушки, якоря и пружины, блок управления приводом клапана, отличающаяся тем, что форсунка снабжена дополнительной двухсекционной...
Керована форсунка для двигуна внутрішнього згоряння
Номер патенту: 3874
Опубліковано: 27.12.1994
Автори: Семенов Володимир Григорович, Ломов Сергій Георгійович
МПК: F02M 51/00
Мітки: двигуна, керована, внутрішнього, згоряння, форсунка
Формула / Реферат:
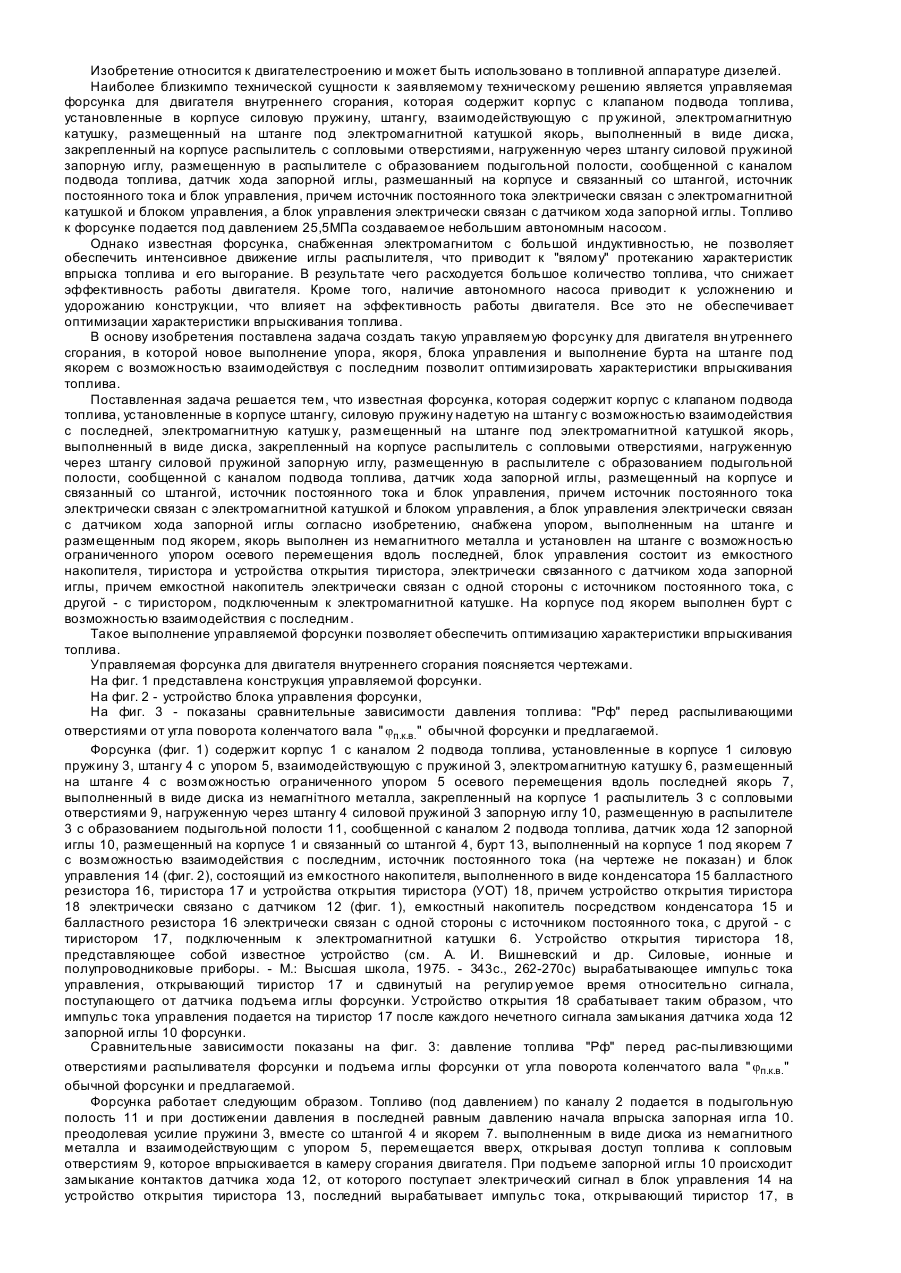
1. Управляемая форсунка для двигателя внутреннего сгорания, содержащая корпус с каналом подвода топлива, установленные в корпусе штангу, силовую пружину, надетую на штангу с возможностью взаимодействия с последней, электромагнитную катушку, размещенный на штанге под электромагнитной катушкой якорь, выполненный в виде диска, закрепленный на корпусе распылитель с сопловыми отверстиями, нагруженную через штангу силовой пружиной запорную иглу,...
Машина для очищення насіння
Номер патенту: 663
Опубліковано: 16.10.2000
Автори: Омеляненко Юрій Вікторович, Малюта Сергій Іванович
Мітки: насіння, машина, очищення
Формула / Реферат:
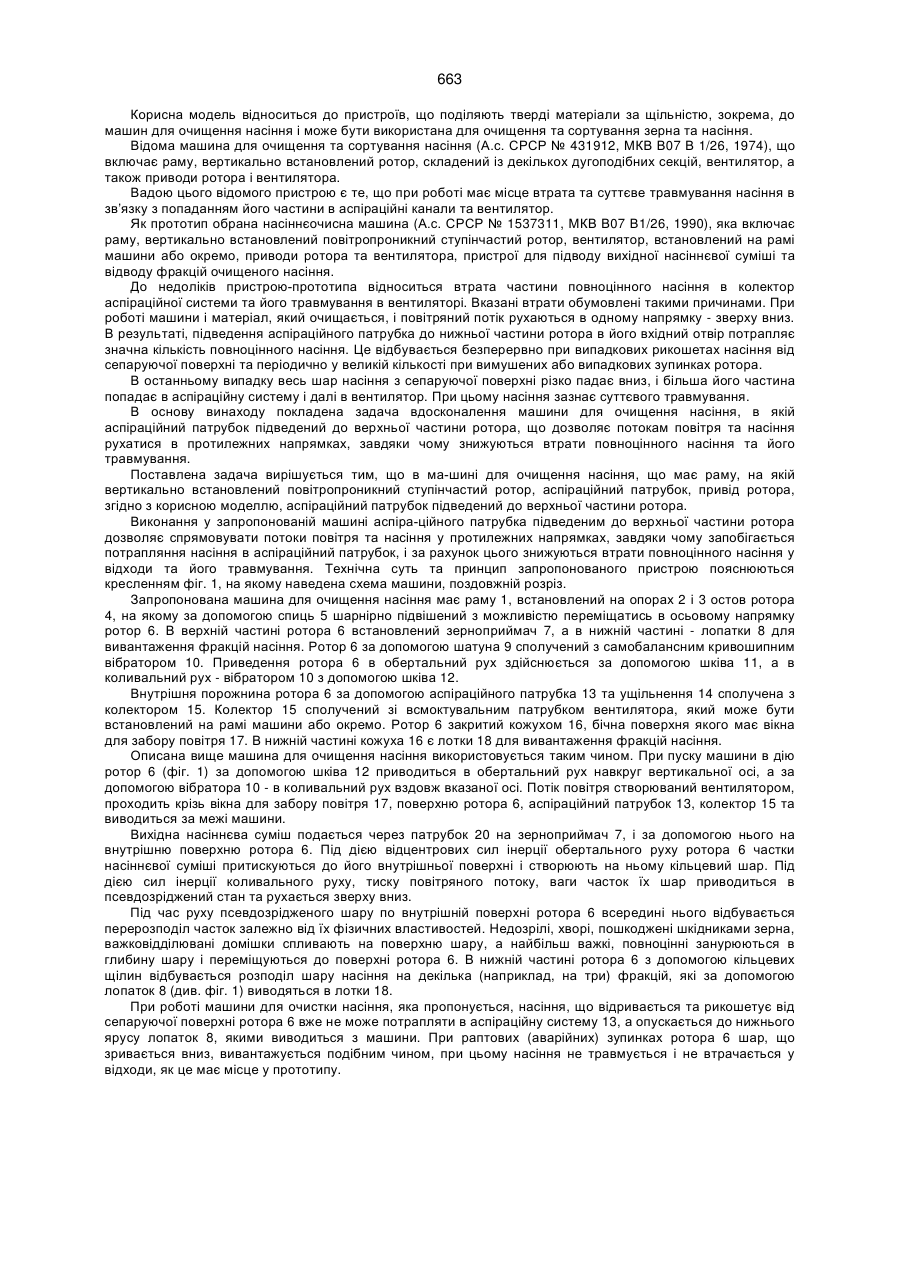
Машина для очищення насіння, що має раму, на якій вертикально встановлений повітропроникний ступінчастий ротор, аспіраційний патрубок, привід ротора, яка відрізняється тим, що аспіраційний патрубок підведений до верхньої частини ротора.
Попередній патент: Пристрій антипригарний для пальника побутової газової плити
Наступний патент: Зносокорозійностійкий композиційний матеріал на основі карбіду хрому
Випадковий патент: Застосування барію октафтородіїтріату як матеріалу для оптичних покриттів