Спосіб дослідження рослинних об’єктів
Номер патенту: 54849
Опубліковано: 17.04.2006
Автори: Федак Володимир Семенович, Мовчан Ярослав Іванович, Масловський Вячеслав Якович, Клочан Петро Степанович
Формула / Реферат
Винахід відноситься до способів створення безступінчатих зубчатих передач із змінюваним передаточним відношенням в механічних передачах.
Відомі способи забезпечення безступінчатої зміни передаточного відношення механічних передач, реалізовані в ремінних варіаторах, що знайшли широке розповсюдження в сільгоспмашинах, станках і т.п.( Іоселевич Г.Б. "Деталі машин" ,М., 1988,с.148) В таких передачах зміна передаточного відношення забезпечується різницею діаметрів ведучого та веденого дисків, які з'єднують ременем.
Недоліками способу є технічно складна конструкція його реалізації, великі габаритні розміри, непостійність передаточного відношення із-за неминучості пружного прослизання ременя. Її недовговічність в швидкісних передачах, тому що ремені мають здатність швидко виходити з ладу, а при навантаженні або при попаданні масла пробуксовують.
Відомий спосіб забезпечення безступінчатої зміни передаточного відношення (а.с. № 512084, М. кл. -В 60К 17/06 - прототип винаходу), реалізований в механічній передачі що включає створення крутячого моменту ведучого та веденого валу, в якому передаточне відношення регулюють різницею діаметрів ведучого та веденого барабанів, а в моменті кручення ведучого вала задіяна гнучка ланка.
Обраний прототип володіє тим ж недоліком, що і всі способи забезпечення безступінчатої зміни передаточного відношення: технічно складна конструкція його реалізації та її ненадійність, так як в моменті кручення ведучого валу задіяна гнучка ланка, що може призвести до її поломки, при збільшенні навантаження або при попаданні масла вона пробуксовує, що веде до непостійності передаточного відношення та є особливо ненадійною при зміні крутячого моменту. Досить складною є система регулювання діаметрів барабанів, робочий діапазон яких збільшити складно та потрібно застосовувати велике зусилля для зміни передаточного відношення.
В основу винаходу поставлена задача: максимально спростити забезпечення безступінчатої зміни передаточного відношення механічної передачі, і при цьому збільшити надійність та довговічність конструктивно-технічного забезпечення способу, забезпечити постійність передаточного відношення та плавність зміни крутячого моменту, крім того - збільшити робочий діапазон способу зміни передаточного відношення та досягти легкості в зміні передаточного відношення.
Поставлена задача вирішується тим, що в способі забезпечення безступінчатої зміни передаточного відношення механічної передачі, що включає створення крутячого моменту ведучого та веденого валу, згідно винаходу, необхідне безступінчате передаточне відношення забезпечують в зубчатій передачі за рахунок різниці радіусів обертання ведучого та веденого зубчатих вінців в їх робочих зонах навколо осей їх валів, для чого, зубчатим вінцям, що постійно зачеплені між собою, шляхом прикладення на них сил, надають радіальне переміщення з можливістю їх дії на з'єднані з ними плечі рухливих сегментів, які мають мінливу геометрію руху з одночасною взаємодією своїх кінцевих плеч з ведучим та веденим валами, причому, початкову силу, наприклад, F, прикладають на ведений вінець, яка викликає його переміщення відносно осі його валу в його робочій зоні на величину R1 в напрямку ведучого вінця, наприклад, вліво, що в свою чергу, переміщає на таку ж величину, в тому ж напрямку і ведучий вінець відносно осі його валу в його робочій зоні, в результаті чого досягають зменшення радіусу обертання ведучого вінця навколо осі його валу в його робочій зоні до величини R-R1 та збільшення радіусу обертання веденого вінця навколо осі його валу в його робочій зоні до величини R+R1, а переміщенням ведучого зубчатого вінцю в зворотному напрямку, шляхом прикладання сили, наприклад, F1, досягають утворення радіусів обертання ведучого та веденого вінцю з протилежними показниками, де R - початковий радіус обертання ведучого та веденого зубчатих вінців.
Створення такого способу, в якому необхідне безступінчате передаточне відношення в механічній передачі забезпечують в зубчатій передачі за рахунок різниці радіусів обертання навколо осей своїх валів в їх робочих зонах - ведучого та веденого зубчатих вінців, є простим та надійним, тут не потрібно реалізовувати додаткові пристрої, які використовують для забезпечення відомих безступінчатих передач, як гнучкі ланки, шківи, тощо, які виходять з ладу, зубчаті вінці знаходяться в постійному зачепленні, що забезпечує постійність передачі, вони не можуть пробуксовувати, тому надійні в роботі, прості конструктивно, малогабаритні по розмірах, відпадає необхідність в прикладанні великих зусиль для створення зміни передаточних відношень, виростає надійність реалізації способу. Радіальне переміщення зубчатих вінців прикладанням сил відносно осей їх валів, дає можливість забезпечити збільшення та зменшення Їх радіусів обертання навколо осей своїх валів в їх робочих зонах, які утворюються від точки зачеплення зубців до осей їх валів, тобто, зміщення кожного вінця згідно осі його валу, наприклад, на величину R1, утворює в одній робочій зоні зменшений (R-R1) радіус обертання вінця,, а в іншій -збільшений радіус обертання (R+R1) що приводить до утворення безступінчатого передаточного відношення між валами, як, наприклад, в результаті обертання ведучого вінця із зменшеним радіусом, а веденого вінця із збільшеним радіусом, створюється передаточне відношення з великим крутячим моментом та з пониженою кутовою швидкістю веденого валу, тому початкову силу і прикладають на ведений вал, щоб створити на ньому невелику вихідну швидкість і навпаки, в результаті обертання великого радіусу ведучого вінця, забезпечується створення передаточного відношення з зменшеним крутячим моментом та збільшеною кутовою швидкістю веденого валу, тобто зростає вихідна швидкість. Збільшення робочого діапазону передачі, а з ним і різниці в радіусах обертання вінців навколо валів дає вигідну перевагу для використання способу на великовантажних автомобілях, де б можна було б невеликими зусиллями створювати відношення з збільшеною кутовою швидкістю та набирати при цьому великі швидкості руху. Завдяки дії зубчатих вінців на з'єднані з ними плечі рухливих сегментів, які мають мінливу геометрію руху та своїми кінцевими плечами одночасно взаємодіють з ведучим та веденим валами, стає можливим забезпечення виконання способу, а радіальне переміщення зубчатих вінців забезпечує ще і збільшення в порівнянні з прототипом, плавність зміни крутячого моменту та створення передаточних відношень різної величини, крім того таке конструктивне забезпечення способу є простим та надійним, та має тенденцію до зменшення затрат на реалізацію способу безступінчатої зміни передачі.
Для пояснення реалізації заявленого способу, представлені креслення, де
на фіг. 1 представлена схема зубчатої передачі для реалізації способу безступінчатої зміни передаточного відношення,
на фіг. 2 - схема переміщення зубчатих вінців відносно осей їх валів, створення робочих зон та радіусів обертання зубчатих вінців навколо осей їх валів.
Зубчата передача складається з ведучого 1 та веденого валу 2, що постійно крутяться навколо своїх осей, які закріплені нерухомо, зубчатого ведучого вінця 3 та зубчатого веденого вінця 4, які знаходяться в постійному зачепленні між собою, та з'єднані з ними плечі рухливих сегментів:
ведучий вінець 3 з'єднаний з можливістю руху, наприклад, шарнірне, з плечами 5,6,7, які одночасно взаємодіють з їх кінцевими плечами" 8,9,10 шляхом, також шарнірного з'єднання, що надає їм можливість мінливої геометрії руху, а кінцеві плечі 8,9,10 в свою чергу, при допомозі знову шарнірного з'єднання, взаємодіють з ведучим валом 1; ведений же вінець 4 з'єднаний з плечами-11,12,13, які одночасно взаємодіють, завдяки, наприклад, їх шарнірному з'єднанню з кінцевими плечами-14,15.16, які в свою чергу взаємодіють з веденим валом 2.
Спосіб реалізують наступним чином: на ведений зубчатий вінець 4 постійного зубчатого зачеплення вінців 3 та 4, радіус обертання яких навколо валів 1 та 2 становить R, прикладають початкову зовнішню силу F, наприклад, силу важеля зміни швидкостей, тобто прикладають необхідну силу, яка заставляє його радіальне переміститись відносно осі його валу 2, в напрямку ведучого вінця 3, наприклад, вліво, діючи одночасно прикладеною силою на плечі 11,12,13 рухливих сегментів, що починають міняти геометрію свого руху, трансформуючись та складаючись згідно прикладеної сили ( на кресленнях не показано) та в свою чергу, завдяки, наприклад, шарнірному з'єднанню, взаємодіють з їх кінцевими плечами 14,15.16, які теж міняють геометрію свого руху згідно прикладеної сили F та взаємодіючи з валом 2, що постійно крутиться навколо осі, яка закріплена нерухомо, виконують переміщення веденого вінця 4 відносно осі його валу 2 на величину R1 в його робочій зоні В. Робочі зони Б і В вінців 3,4 створюються від місця зачеплення вінців 3 та 4 до центрів обертання їх валів 1 та 2, тобто в робочих зонах створюється майбутнє передаточне відношення безступінчатої зубчатої передачі. В результаті постійного зачеплення вінців, переміщення веденого вінця 4 прикладеною силою F, викликає переміщення ведучого вінця 3 відносно осі його валу 1 також на величину R1 в його робочій зоні Б, тобто, ведений вінець переміщує ведучий вінець, зменшуючи відстань в робочій зоні Б, що утворюється між вінцем 3 та ведучим валом 1, що постійно крутиться навколо своєї осі, на величину R1. При цьому, відстань в робочій зоні Б, що утворюється між вінцем 3 та ведучим валом 1, зменшується до величини R-R1 та відповідає зменшеному радіусу обертання вінця 3 відносно валу 1 в його робочій зоні Б, до величини R-R1. А відстань в робочій зоні В, що утворюється між веденим вінцем 4 та веденим валом 2, що постійно крутиться, збільшується до величини R+R1, та тим самим відповідає збільшеному радіусу обертання вінця 4 відносно валу 2 в робочій зоні В до величини R+R1. В цей момент відбувається забезпечення безступінчатої зміни передаточного відношення між валами 1 і 2. Завдяки тому, що ведучий вал має зменшений радіус обертання його вінця 3 в робочій зоні Б, створюється передаточне відношення з великим крутячим моментом та пониженою кутовою швидкістю веденого валу.
При переміщенні ведучого зубчатого вінцю 3 в протилежну сторону, тобто, вправо, відносно валу 1 в його робочій зоні Б, для чого також прикладають силу, наприклад F1, радіус обертання ведучого вінця 3 в робочій зоні Б збільшується, а веденого - 4, навпаки, зменшується, тобто знову змінюється передаточне відношення, при цьому, зменшується крутячий момент веденого валу, а кутова швидкість зростає та зростає вихідна швидкість руху, наприклад, транспортного засобу.
Зміщення зубчатих вінців 3 та 4 прикладанням поперемінне сил відносно валів 1 та 2 можна фіксувати важелем переключення передач, установлюючи тим самим в зубчатій передачі, одержане від зміщення передаточне число, наприклад, S. В період реалізації вищеописаного способу, відбувається передача крутячого моменту веденому, наприклад, колесу, згідно виставленого передаточного числа, наприклад, S.
Змінюючи зовнішні прикладені сили з F, F1 на, F2, F3 і т. д. важелем переключення передач, та прикладаючи їх поперемінне на різні вінці, можна одержувати необхідні передаточні числа D, G і так далі.
Текст
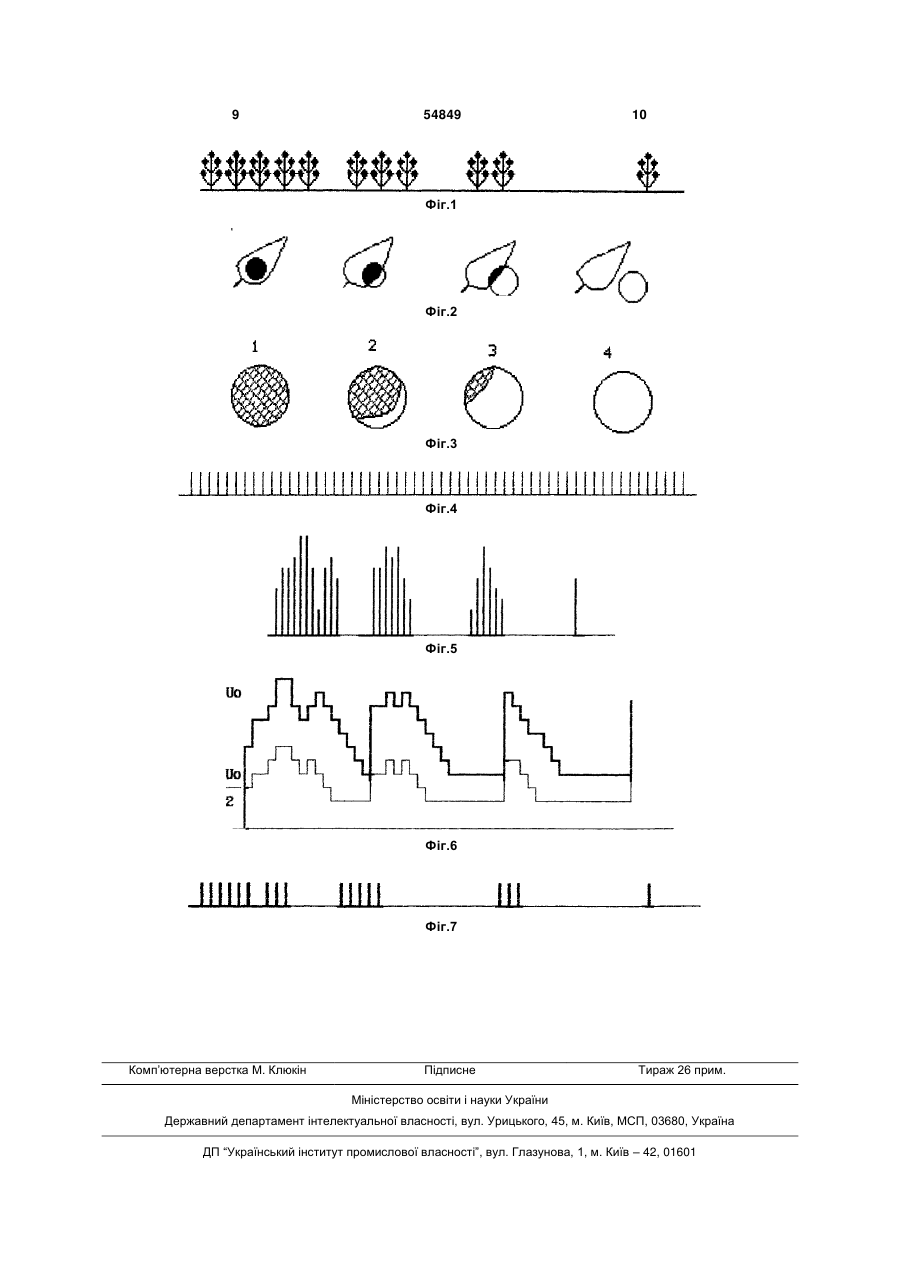
1. Спосіб дистанційного дослідження рослинних об'єктів, що включає імпульсне опромінювання об'єкта лазером, прийом та реєстрацію сигналів флюоресценції синхронно з опроміненням в напрямку, зворотному до опромінювання, який відрізняється тим, що прийнятий поточний сигнал флюоресценції порівнюють з попереднім і приймають за опорний більший за величиною 3 54849 4 лазером в одному такті опромінення (одинича вовника визначають шляхом дистанційного збуплоща) помножена на кількість тактів опромінендження люмінісценції та вимірювання сигналів, які ня N. приймають від об'єкту на зміщеній частоті, усуненПроективне покриття визначають з виразу ня впливу поглинання та розсіювання випромінення в атмосфері послідовним стробуванням сигнаn лів спонтанного комбінаційного розсіювання азоту Sk з горизонту не більше 10м від поверхні землі, лю1 Пп , мінісценції хлорофілу зеленої маси та волокна NS1 бавовника. з наступним нормуванням сигналів де Sk - площа проекції фітоелементів на грунт люмінісценції на сигнал комбінаційного розсіюванв межах одиничної площі; ня азоту та визначають кількість бавовняного воn - кількість плям освітлення заповнених фітолокна за формулою С=К1А елементами за N тактів опромінення. l l За контрольовану площу приймають ділянку де A 1 К2 2 , земної поверхні на якій здійснюють дистанційні lкр lкр визначення, наприклад, окреме поле або угіддя С - середня кількість бавовняного волокна; господарства. В залежності від способу виявлення К1, К2 - постійні коефіцієнти; (профільний, галсовий, панорамний) контрольоваІ1, І2 - інтенсивності сигналів люмінісценції ну площу представляють різними досліджуваними бавовняного волокна та зеленої маси відповідно; (представницькими) ділянками, наприклад, піксеІкр - інтенсивність сигналу комбінаційного розлями різної площі на космічних знімках. Проективсіювання азоту. не покриття корелює з багатьма показниками буСпільними рисами аналогу та запропонованодови рослинного покриву, зокрема з зеленою го способу є дистанційне збудження люмінісценції масою, площею листяної поверхні, густотою посіхлорофілу шляхом опромінення об'єкта лазером ву, фазою розвитку, зімкненістю посіву, тощо. Вита вимірювання відлуння-сигналів люмінісценції на значення зазначених показників на різних фазах зміщеній частоті. розвитку сільгоспкультур дозволяє прогнозувати Причиною, яка заважає вирішенню поставлеурожай та впливати на нього. ної задачі є те, що аналог на дозволяє визначати Необхідною складовою дистанційних досліпроективне покриття, а тільки усуває вплив розсіджень рослинних об'єктів є ідентифікація рослин ювання та поглинання випромінення атмосферою. на фоні ґрунту. Відомі способи, за якими здійснюІз аналогів дистанційних визначень будови та ють цю ідентифікацію: за різницею радіаційних фізіологічного стану рослинних об'єктів найближтемператур в інфрачервоній області, за спектрачим до запропонованого за технічною суттю в льною яскравістю відбитого сонячного світла в "Способ дистанционого определения физиологизеленій, червоній та інфрачервоній областях, за ческого состояния растений", [авт. свід. сигналами наведеної флюоресценції хлорофілу. №1768071, бул. №38 от 15.10.92.]. Спосіб - протоВідомий "Способ дистанционного исследоватип включає збудження лазерним опроміненням ния растительных объектов и устройство для его флюоресценції рослин, реєстрацію інтенсивності осуществления" [авт. свід. №1460625, бюл. №7, флюоресценції у спектральних інтервалах 44023.02.89г.], в якому кількість горизонтів переважно540НМ та 630-730нм, а індикацію ураженості росго розташування фітоелементів рослинного об'єклин мучнистою росою, тобто визначення стану та визначають шляхом опромінення об'єкта пророслин, здійснюють за відношенням; менем лазера, приймання відбитого від об'єкта випромінення під кутом до кута лазера, розділь ному підрахунку зображень з однаковим числом ' подрібнень плями лазерного променя на фітоеледе - відношення інтенсивностей, яке виміментах різних горизонтів об'єкта. рюють; Спільними рисами аналогу та запропоновано' - відношення інтенсивностей для здорових го способу є опромінення рослинного об'єкта пророслин. менем лазера, приймання випромінення об'єкта та Спільними рисами прототипу та запропоноваперетворення його в електричний сигнал. Причиного способу є збудження лазерним опроміненням ною, що заважає досягненню поставленої мети є флюоресценції рослин та реєстрація інтенсивності те, що способи, які використовують приймання флюоресценції. відбитого сигналу під кутом до опромінення принПричиною, яка заважає досягненню поставлеципово не дозволяють визначати проективне покної мети є те, що прототип є індикаторним спосориття низькорослої та сланкої рослинності, надійбом і не дозволяє визначати проективне покриття. но виділяти її на фоні ґрунту та здійснювати Принциповою обмеженістю розглянутих сповизначення з великих висот. Під фізіологічним собів дистанційного зондування рослинних об'єктів станом рослинних об'єктів розуміють обмін речоє необхідність використання зразкових сигналів, вин, який проявляється у продуктивності, інтенсиякі визначають на лабораторних рослинах або на вності фотосинтезу,, дихання, транспірації, теплозразкових чи-модельних ділянках, полях та полігових, водних та солевих стресах, стресах від нах а потім використовують для порівняльних, забруднень середовища, заражень, хвороб, шкідкількісних визначень контрольованих показників. ників та паразитів рослин. В основу винаходу поставлене завдання ствоВідомий "Способ определения продуктивности рення такого способу дослідження рослинних об'єбиологических культур", [авт. свід. №1241113, ктів, в якому завдяки введенню нових операцій бюл. №24.], 30.06.86г. в якому продуктивність ба 5 54849 6 стало б можливим визначення проективного покосвітлення, вибір опорного сигналу, адаптацію риття та збільшення достовірності визначень без його до змін зразкового, округлення сигналів флюзастосування вимірювань зразкових сигналів на оресценції та накопичення числа подій флюоресеталонних ділянках, тобто без наземного забезпеценції і тактів опромінення. Проективне покриття чення. визначають з виразу; Вирішення поставленої задачі досягається n тим, що спосіб включає операції імпульсного 100 Uk опромінення об'єкта лазером, прийом та реєстра1 Пп , цію сигналів наведеної флюоресценції синхронно NU1 з опроміненням в напрямку зворотному до освітде Uk - поточний сигнал флюоресценції з освілення, порівняння поточного сигналу флюоресцетленої плями; нції з попереднім і прийняття в якості опорного n - число зафіксованих подій флюоресценції; більшого за величиною сигналу, з наступною заміU1 - зразковий сигнал флюоресценції з одининою опорного сигналу на поточний сигнал флюочної площі зразкової ділянки при 100% проективресценції, в разі перевищення ним величини опоному покриті; рного сигналу, причому в кожному наступному N - число тактів опромінення. такті визначення у випадку зменшення поточного В залежності від відстані до об'єкта та хараксигналу, опорний сигнал зменшить на величину теристик лазера, плями освітлення можуть мати до тих пір, доки поточне значення сигналу флюорізну одиничну площу, а в залежності від проектиресценції не перевищить опорний сигнал, здійсвного покриття має місце різне заповнення освітнюють підрахунок імпульсів опромінення та сигналених плям фітоелементами (Фіг.2-3). У випадку і лів флюоресценції рівних не менше половини (Фіг.2-3) проективне покриття Пп>100% і освітлена опорного сигналу і за відношенням кількості цих пляма повністю заповнена фітоелементами, у висигналів до кількості імпульсів опромінення визнападку 2 проективне покриття Пп>50% і освітлена чають проективне покриття рослинних об'єктів. пляма заповнена фітоелементами більше ніж наКрім того, величину визначають з виразу половину. У випадку 3 проективне покриття =2LU0/Dn для міжрядь сільгоспкультур та =5U0/n Пп
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for analyzing plant objects
Автори англійськоюFedak Volodymyr Semenovych, Klochan Petro Stepanovych, Movchan Yaroslav Ivanovych
Назва патенту російськоюСпособ исследования растительных объектов
Автори російськоюФедак Владимир Семенович, Клочан Петр Степанович, Мовчан Ярослав Иванович
МПК / Мітки
МПК: G01N 21/64, G01J 3/00
Мітки: дослідження, рослинних, об'єктів, спосіб
Код посилання
<a href="https://ua.patents.su/5-54849-sposib-doslidzhennya-roslinnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб дослідження рослинних об’єктів</a>
Пристрій для дослідження триботехнічних властивостей матеріалів і покриттів при ударних навантаженнях
Номер патенту: 36726
Опубліковано: 16.04.2001
Автори: Гузенко Юрій Михайлович, Джемелінський Віталій Васильович, Богомол Іван Васильович
МПК: G01N 3/56
Мітки: пристрій, ударних, матеріалів, навантаженнях, дослідження, покриттів, триботехнічних, властивостей
Текст:
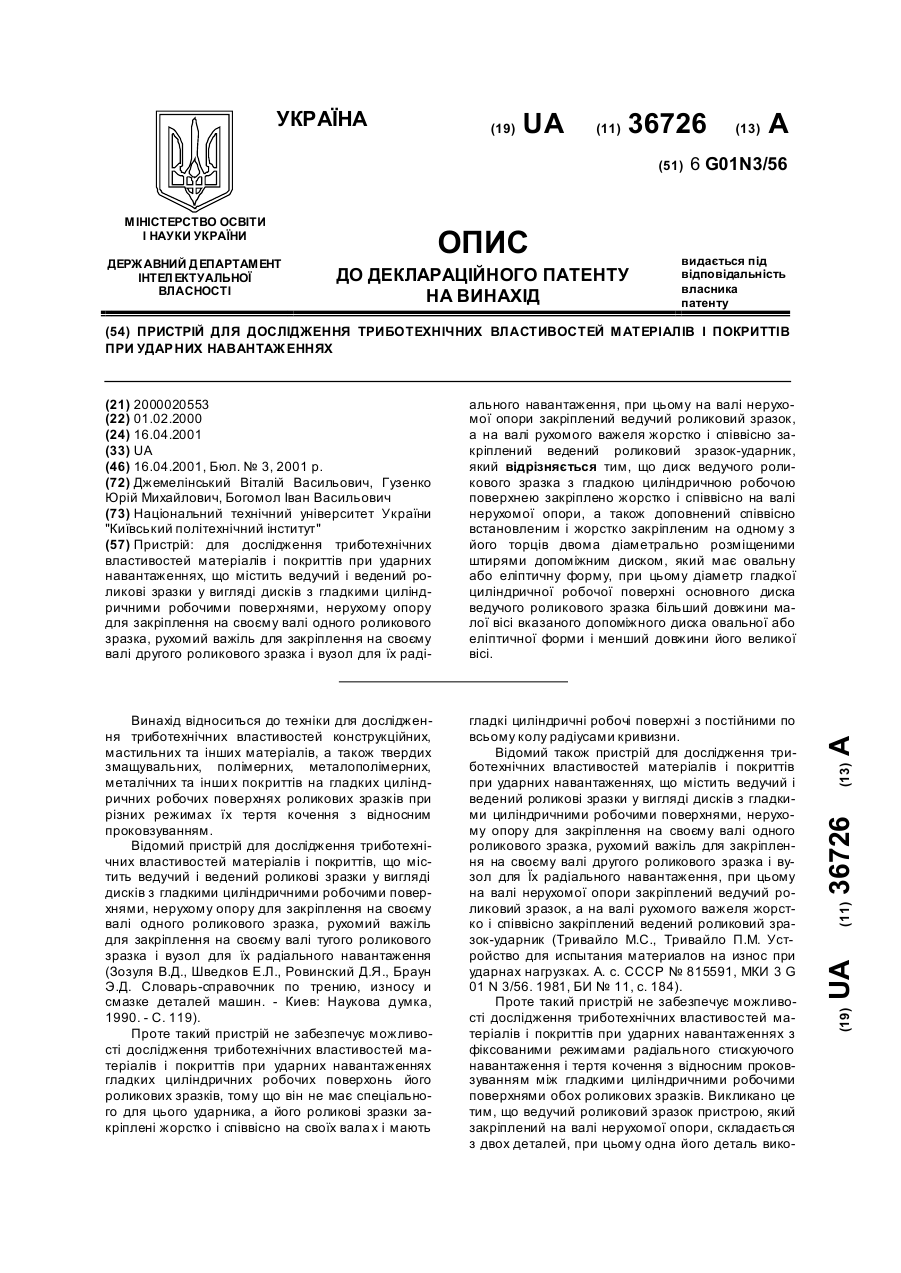
...пристрій для дослідження триботехнічних властивостей матеріалів і покриттів при ударних навантаженнях; на фіг. 3 і 4 показаний ведучий роликовий зразок пристрою. Пристрій для дослідження триботехнічних властивостей матеріалів і покриттів при ударних навантаженнях має ведучий 1 і ведений 2 роликові зразки у вигляді дисків з гладкими циліндричними робочими поверхнями, нерухому опору 3 для закріплення на своєму валі одного роликового зразка,...
Гідромеханічна коробка передач
Номер патенту: 74365
Опубліковано: 15.12.2005
Автор: Скрипець Зеновій Іванович
МПК: F16H 47/00
Мітки: гідромеханічна, передач, коробка
Формула / Реферат:
Гідромеханічна коробка передач, що має корпус, ведучий, ведений і щонайменше один допоміжний вали, встановлені на валах у ряди, трансформуючі крутний момент і оберти елементи, наприклад шестерні, муфту обгону та автоматично регульовану по жорсткості гідромуфту обмеження крутного моменту, яка відрізняється тим, що гідромуфта зв`язує співвісні ведучий і ведений вали, а муфта обгону зв`язує один з рухомих елементів та вал, на якому його...
Стенд для дослідження гусеничного рушія
Номер патенту: 10741
Опубліковано: 15.11.2005
Автори: Волонцевич Дмитро Олегович, Богач Андрій Станіславович, Янчик Олександр Григорович, Єпіфанов Віталій Валерійович, Павленко Сергій Валерійович
МПК: G01M 17/007
Мітки: дослідження, рушія, гусеничного, стенд
Формула / Реферат:
1. Стенд для дослідження гусеничного рушія, який містить нерухому основу, на якій розміщені підтримувальні та підресорені опорні котки, ведуче та напрямне колеса, охоплені гусеницею, привід ведучого колеса, опорні барабани, охоплені гнучкою стрічкою, верхня ланка якої контактує з опорною ділянкою гусениці та спирається на пластину, який відрізняється тим, що опорні барабани встановлені ексцентрично.2. Стенд для дослідження гусеничного...
Зубчаста передача

Номер патенту: 11754
Опубліковано: 16.01.2006
Автори: Піпа Борис Федорович, Стежко Анатолій Васильович, Марченко Анатолій Іванович
МПК: F16H 1/24
Формула / Реферат:
Зубчаста передача, що містить шестірню, зубчасте колесо, які встановлені, відповідно, на ведучому та веденому валах, паразитну шестірню, яка знаходиться в зачепленні з зубчастим колесом, та зубчастий вінець з внутрішнім зачепленням, причому шестірня, зубчасте колесо та паразитна шестірня встановлені всередині зубчастого вінця, а їх осі розташовані в одній площині, яка відрізняється тим, що зубчаста передача додатково обладнана двома...
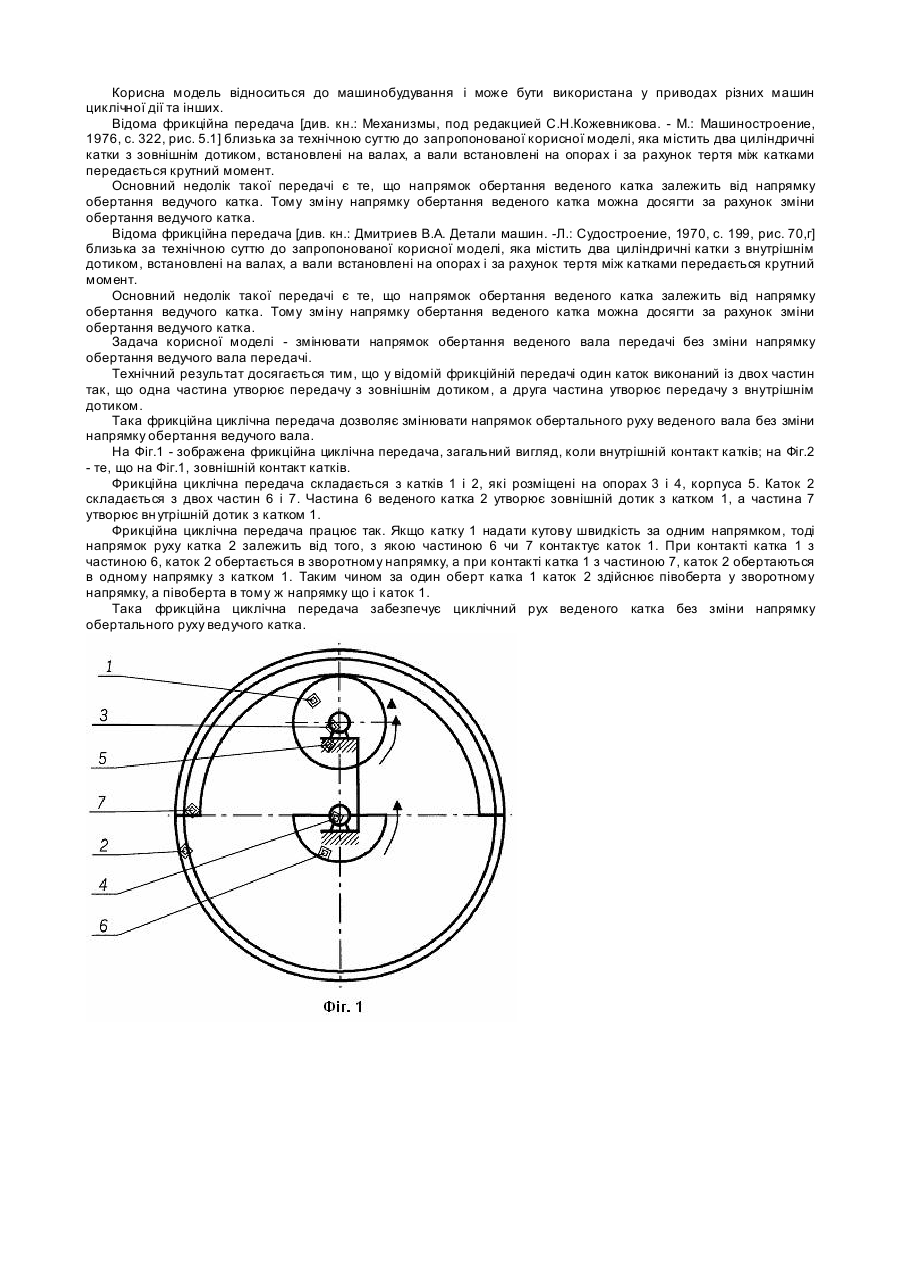
Фрикційна циклічна передача
Номер патенту: 8794
Опубліковано: 15.08.2005
Автори: Стрілець Олег Романович, Стрілець Володимир Миколайович
МПК: F16H 13/00, F16H 15/00
Мітки: фрикційна, передача, циклічна
Формула / Реферат:
Фрикційна циклічна передача, що містить два котки з зовнішнім дотиком або внутрішнім дотиком, яка відрізняється тим, що один коток виконаний із двох частин так, що одна частина утворює передачу з зовнішнім дотиком, а друга частина утворює передачу з внутрішнім дотиком.
Попередній патент: Спосіб виготовлення заготовок з інструментальної сталі
Наступний патент: Пристрій для обробки текучого середовища, система та спосіб обробки текучого середовища
Випадковий патент: Керований випрямляч