Механотерапевтичний апарат
Номер патенту: 58501
Опубліковано: 15.08.2003
Автори: Лапутін Анатолій Миколайович, Сичов Сергій Олександрович, Петрушевський Іван Іванович, Канішевський Станислав Михайлович

Формула / Реферат
1. Механотерапевтичний апарат, який містить горизонтальну основу та змонтоване на ній, виконане по довжині складеним, ложе з шарнірно зв’язаних елементів, які включають опори для голови, шийної, грудної і поперекової частин тіла людини, опору для рук і вібратор, який відрізняється тим, що горизонтальна основа виконана у вигляді хрестовини, яку встановлено на опорах-присосках, а ложе шарнірно встановлено на хрестовині за допомогою закріпленої на ній станини, між станиною і хрестовиною розміщено вібронавантажувач з вібратором, який включає зв’язані з вібратором ножний привід у вигляді двоплечого шатуна з педалями та ручний привід як опору для рук у вигляді зв’язаних з шатуном тягами рухомих трубчастих рукояток, посаджених на бокові частини напрямної рамки, яку закріплено на станині, і має можливість кінематичної взаємодії з віссю, на яку посаджено опорні котки, що опираються на хрестовину.
2. Механотерапевтичний апарат за п. 1, який відрізняється тим, що вібратор виконаний у вигляді розміщеного під станиною співвісно з опорними котками підтримуючого котка, який посаджений на спільну вісь з можливістю встановлення та регулювання величини ексцентриситету.
Текст
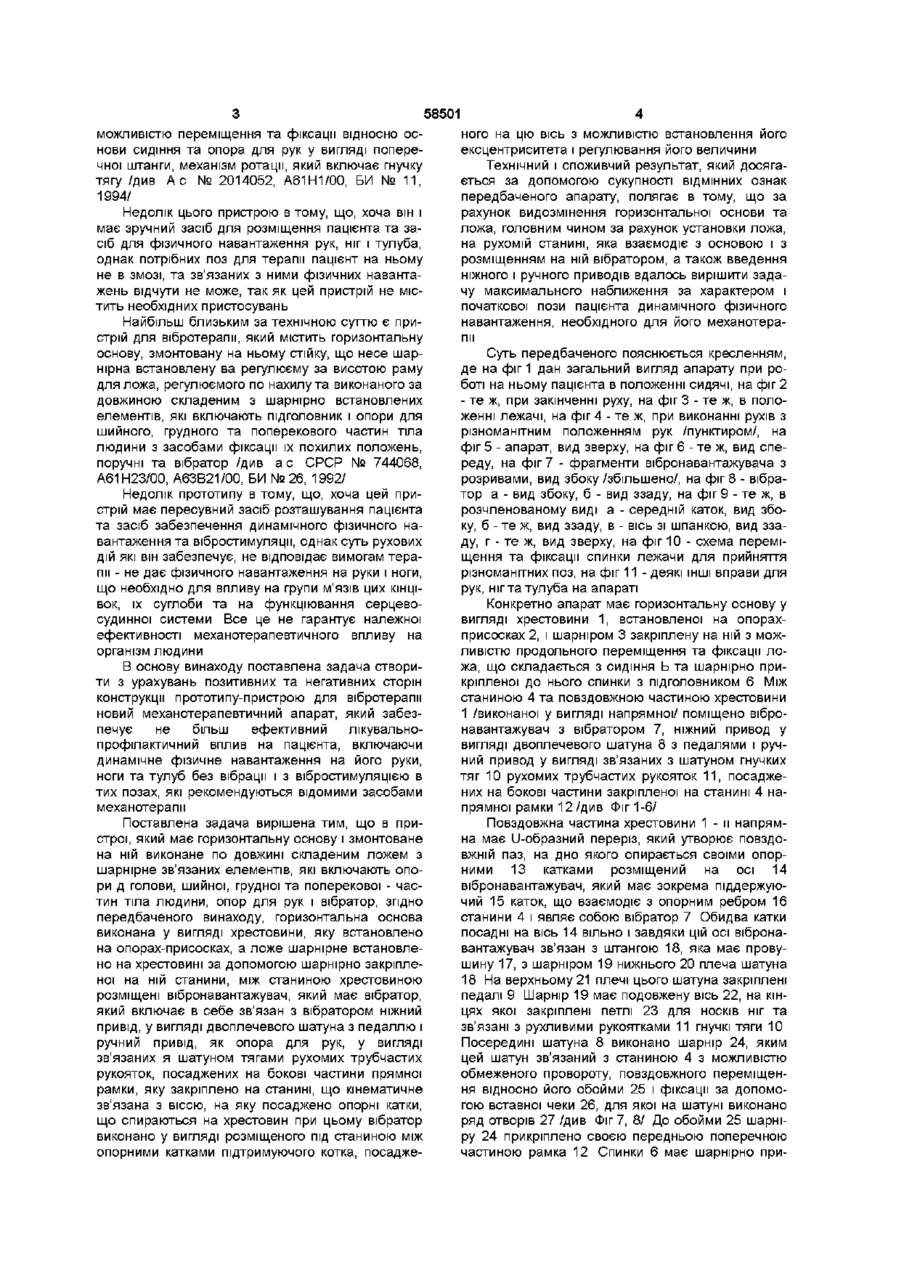
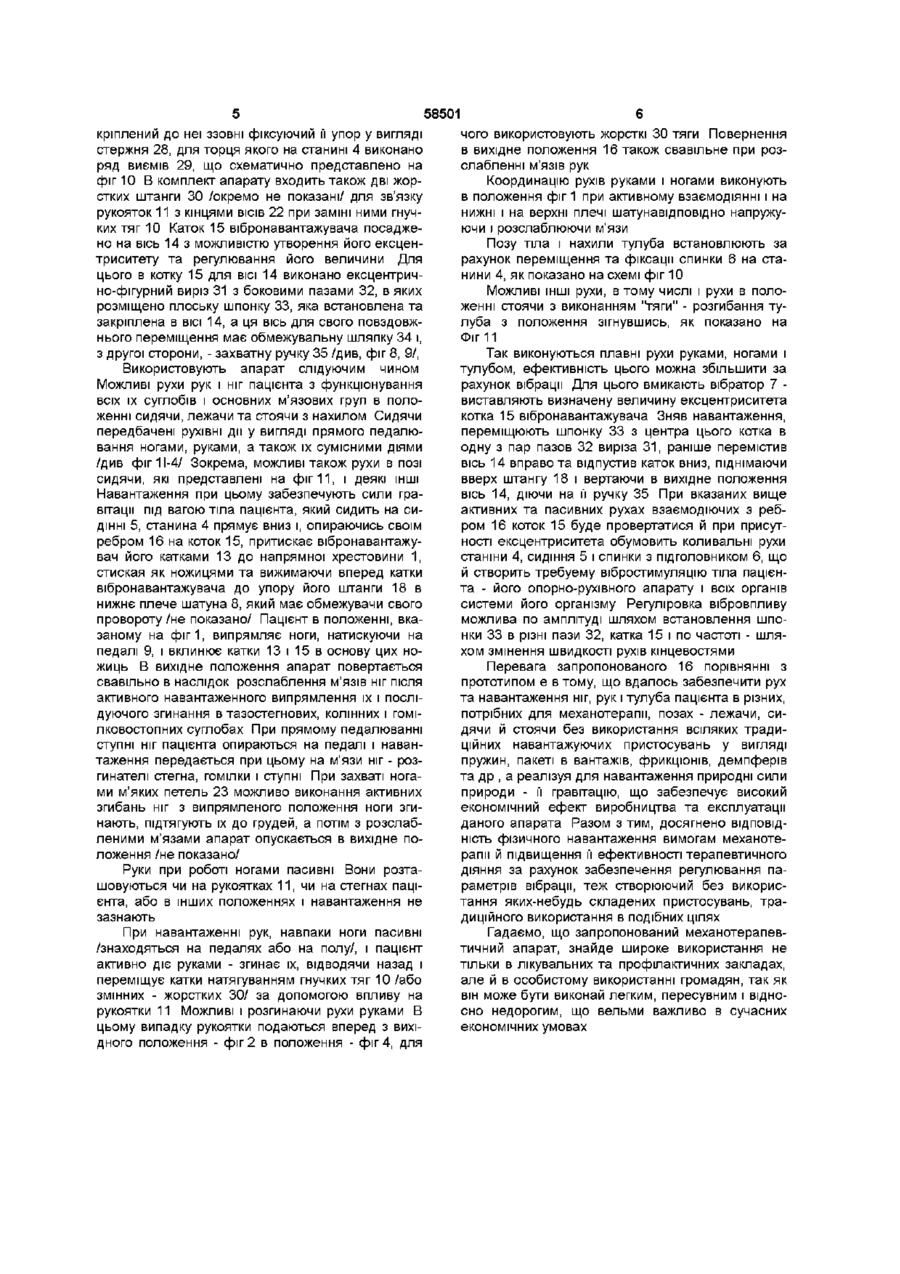
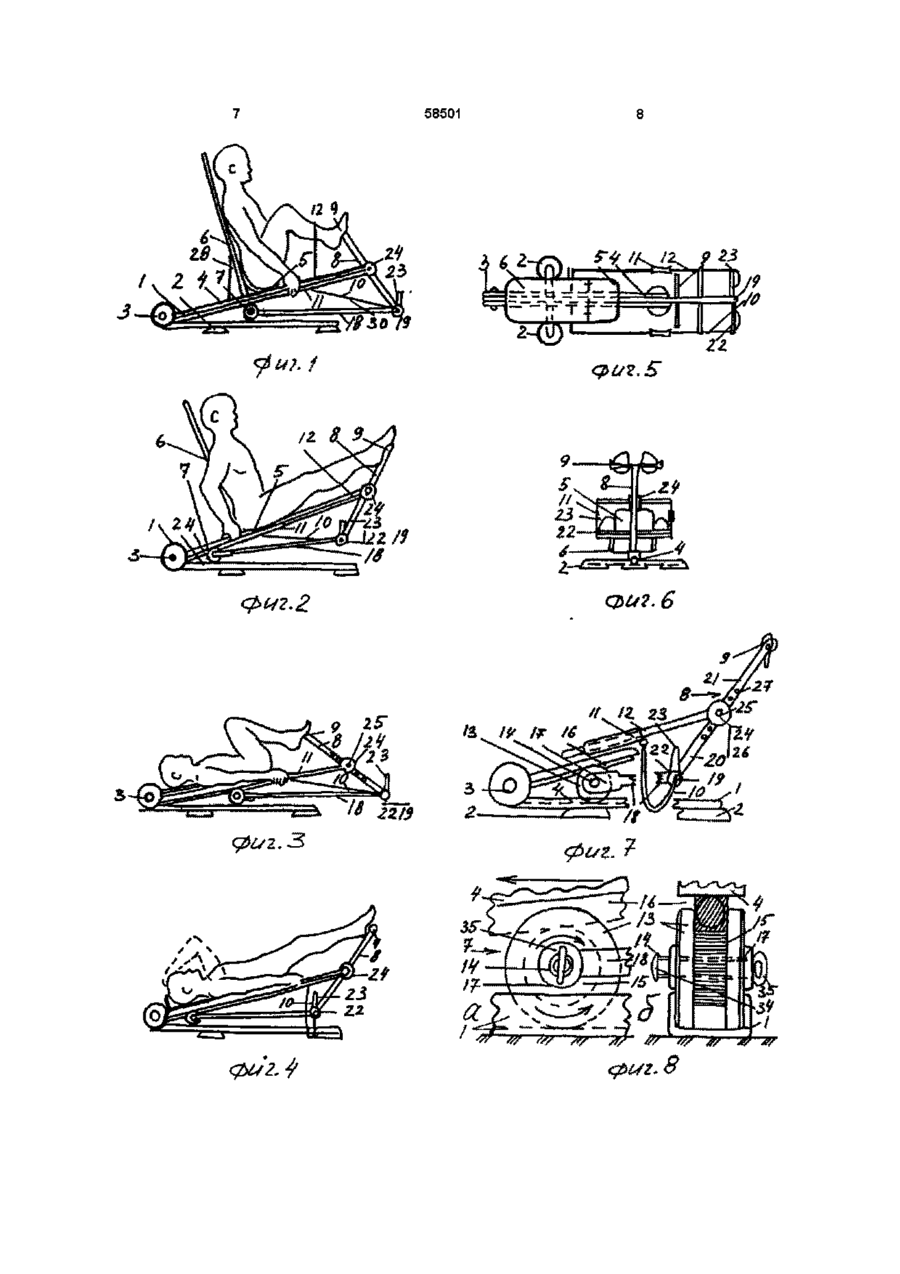
1 Механотерапевтичний апарат, який містить горизонтальну основу та змонтоване на ній, виконане по довжині складеним, ложе з шарнірно зв'язаних елементів, які включають опори для голови, шийної, грудної і поперекової частин тіла людини, опору для рук і вібратор, який відрізняється тим, що горизонтальна основа виконана у вигляді хрестовини, яку встановлено на опорах-присосках, а ложе шарнірно встановлено на хрестовині за допомогою закріпленої на ній станини, між станиною і хрестовиною розміщено вібронавантажувач з вібратором, який включає зв'язані з вібратором ножний привід у вигляді двоплечого шатуна з педалями та ручний привід як опору для рук у вигляді зв'язаних з шатуном тягами рухомих трубчастих рукояток, посаджених на бокові частини напрямної рамки, яку закріплено на станині, і має можливість кінематичної взаємодії з віссю, на яку посаджено опорні котки, що опираються на хрестовину 2 Механотерапевтичний апарат за п 1, який відрізняється тим, що вібратор виконаний у вигляді розміщеного під станиною СПІВВІСНО з опорними котками підтримуючого котка, який посаджений на спільну вісь з можливістю встановлення та регулювання величини ексцентриситету о Передбачений винахід відноситься до медицини та спорту, зокрема до пристроїв для профілактики та лікування о пор но-рухового апарату та серцево-судинної системи людини фізичним навантаженням Відомо засіб лікування ішемічної хвороби серця шляхом застое сування динамічного навантаження на велотренажері в горизонтальному положенні пацієнта лежачі на спині при потужності опору педалей 15-20Втта висоти ВІСІ педалі над горизонтальною поверхнею від 2/3 до повної довжини стегна - Зр на тиждень по 40хв на протязі 1 5 МІСЯЦІ /див а с СРСР № 4238758, А61Н 1/00, БИ №23, 1986/ Недолік цього винаходу в тому, що до нього нема опису пристрою велотренажера, на якому можливо було б успішно реалізувати запропонований засіб лікування Відомо тренажер для розвидку серцевосудинної системи космонавта, який містить в собі горизонтально розташовану раму з двома напрямними , які несуть каретки з платформами для ніг і привод, який включає гнучку тягу, що оточує опірний блок з роликами та рукоятки, а також поясний ремінь, амортизаторами звязании з каретками і зв'язані з ними тягами рукоятки /див а с СРСР № 1769906, А63В69/18, 23/04, БИ № 39, 1992/ Недолік цього тренажеру в тому, що на ньому пацієнт не може прийняти необхідну для лікувальної рухівної активності позу і тим більше змінювати и в обумовлених випадках» Для цього в ньому нема ВІДПОВІДНИХ пристроїв Відомо крісло для впливу вібрації, який містить регулююме сидіння зі спинкою, споряджене опорними елементами для рук і ніг, з'єднаними з механізмом вібрації та виконаними з можливістю регулювання їх положення, при цьому вібраторелектромагнітний /див А с СРСР № 18369446, А61Н23/02, БИ №32, 1993/ Недолік цього крісла в тому, що, хоча в ньому використана терапевтична вібрація та передбачена зміна пози пацієнта, проте воно не містить засобів прикладання зусиль рук і ніг, тулуба, що необхідно для механотерапії і тому не може забезпечити належну динамічне фізичне навантаження Відомо пристрій для механотерапії, який містить в собі основу зі стійкою, на якій встановлені з О ю 00 ю 58501 можливістю переміщення та фіксації відносно основи сидіння та опора для рук у вигляді поперечної штанги, механізм ротації, який включає гнучку тягу /див А с № 2014052, А61Н1/00, БИ № 11, 1994/ Недолік цього пристрою в тому, що, хоча він і має зручний засіб для розміщення пацієнта та засіб для фізичного навантаження рук, ніг і тулуба, однак потрібних поз для терапії пацієнт на ньому не в змозі, та зв'язаних з ними фізичних навантажень відчути не може, так як цей пристрій не містить необхідних пристосувань Найбільш близьким за технічною суттю є пристрій для вібротерапм, який містить горизонтальну основу, змонтовану на ньому стійку, що несе шарнірна встановлену ва регулюєму за висотою раму для ложа, регулюємого по нахилу та виконаного за довжиною складеним з шарнірно встановлених елементів, які включають підголовник і опори для шийного, грудного та поперекового частин тіла людини з засобами фіксації їх похилих положень, поручні та вібратор /див ас СРСР № 744068, А61Н23/00, А63В21/00, БИ № 26, 1992/ Недолік прототипу в тому, що, хоча цей пристрій має пересувний засіб розташування пацієнта та засіб забезпечення динамічного фізичного навантаження та вібростимуляцм, однак суть рухових дій які він забезпечує, не відповідає вимогам терапії - не дає фізичного навантаження на руки і ноги, що необхідно для впливу на групи м'язів цих КІНЦІВОК, їх суглоби та на функціювання серцевосудинної системи Все це не гарантує належної ефективності механотерапевтичного впливу на організм людини В основу винаходу поставлена задача створити з урахувань позитивних та негативних сторін конструкції прототипу-пристрою для вібротерапм новий механотерапевтичний апарат, який забезпечує не більш ефективний лікувальнопрофілактичний вплив на пацієнта, включаючи динамічне фізичне навантаження на його руки, ноги та тулуб без вібрації і з вібростимуляцією в тих позах, які рекомендуються відомими засобами механотерапії Поставлена задача вирішена тим, що в пристрої, який має горизонтальну основу і змонтоване на ній виконане по довжині складеним ложем з шарнірне зв'язаних елементів, які включають опори д голови, шийної, грудної та поперекової - частин тіла людини, опор для рук і вібратор, згідно передбаченого винаходу, горизонтальна основа виконана у вигляді хрестовини, яку встановлено на опорах-присосках, а ложе шарнірне встановлено на хрестовині за допомогою шарнірно закріпленої на ній станини, між станиною хрестовиною розміщені вібронавантажувач, який має вібратор, який включає в себе зв'язан з вібратором ніжний привід, у вигляді двоплечевого шатуна з педаллю і ручний привід, як опора для рук, у вигляді зв'язаних я шатуном тягами рухомих трубчастих рукояток, посаджених на бокові частини прямної рамки, яку закріплено на станині, що кінематичне зв'язана з віссю, на яку посаджено опорні катки, що спираються на хрестовин при цьому вібратор виконано у вигляді розміщеного під станиною між опорними катками підтримуючого котка, посадже ного на цю вісь з можливістю встановлення його ексцентриситета і регулювання його величини Технічний і споживчий результат, який досягається за допомогою сукупності ВІДМІННИХ ознак передбаченого апарату, полягає в тому, що за рахунок видозмінення горизонтальної основи та ложа, головним чином за рахунок установки ложа, на рухомій станині, яка взаємодіє з основою і з розміщенням на ній вібратором, а також введення ніжного і ручного приводів вдалось вирішити задачу максимального наближення за характером і початкової пози пацієнта динамічного фізичного навантаження, необхідного для його механотерапії Суть передбаченого пояснюється кресленням, де на фіг 1 дан загальний вигляд апарату при роботі на ньому пацієнта в положенні сидячі, на фіг 2 - те ж, при закінченні руху, на фіг 3 - те ж, в положенні лежачі, на фіг 4 - те ж, при виконанні рухів з різноманітним положенням рук /пунктиром/, на фіг 5 - апарат, вид зверху, на фіг 6 - те ж, вид спереду, на фіг 7 - фрагменти вібронавантажувача з розривами, вид збоку/збільшено/, на фіг 8 - вібратор а - вид збоку, б - вид ззаду, на фіг 9 - те ж, в розчленованому виді а - середній каток, вид збоку, б - те ж, вид ззаду, в - вісь зі шпанкою, вид ззаду, г - те ж, вид зверху, на фіг 10 - схема переміщення та фіксації спинки лежачи для прийняття різноманітних поз, на фіг 11 - деякі ІНШІ вправи для рук, ніг та тулуба на апараті Конкретно апарат має горизонтальну основу у вигляді хрестовини 1, встановленої на опорахприсосках 2, і шарніром 3 закріплену на ній з можливістю продольного переміщення та фіксації ложа, що складається з сидіння Ь та шарнірно прикріпленої до нього спинки з підголовником 6 Між станиною 4 та повздовжною частиною хрестовини 1 /виконаної у вигляді напрямної/ поміщено вібронавантажувач з вібратором 7, ніжний привод у вигляді двоплечевого шатуна 8 з педалями і ручний привод у вигляді зв'язаних з шатуном гнучких тяг 10 рухомих трубчастих рукояток 11, посаджених на бокові частини закріпленої на станині 4 напрямної рамки 12 /див Фіг 1-6/ Повздовжна частина хрестовини 1 - и напрямна має U-образний переріз, який утворює повздовжній паз, на дно якого опирається своїми опорними 13 катками розміщений на осі 14 вібронавантажувач, який має зокрема піддержуючий 15 каток, що взаємодіє з опорним ребром 16 станини 4 і являє собою вібратор 7 Обидва катки посадні на вісь 14 вільно і завдяки цій осі вібронавантажувач зв'язан з штангою 18, яка має провушину 17, з шарніром 19 нижнього 20 плеча шатуна 18 На верхньому 21 плечі цього шатуна закріплені педалі 9 Шарнір 19 має подовжену вісь 22, на кінцях якої закріплені петлі 23 для носків ніг та зв'язані з рухливими рукоятками 11 гнучкі тяги 10 Посередині шатуна 8 виконано шарнір 24, яким цей шатун зв'язаний з станиною 4 з можливістю обмеженого провороту, повздовжного переміщення відносно його обойми 25 і фіксації за допомогою вставної чеки 26, для якої на шатуні виконано ряд отворів 27 /див Фіг 7, 8/ До обойми 25 шарніру 24 прикріплено своєю передньою поперечною частиною рамка 12 Спинки 6 має шарнірно при 58501 кріплений до неї ззовні фіксуючий її упор у вигляді стержня 28, для торця якого на станині 4 виконано ряд виємів 29, що схематично представлено на фіг 10 В комплект апарату входить також дві жорстких штанги ЗО /окремо не показані/ для зв'язку рукояток 11 з кінцями ВІСІВ 22 при заміні ними гнучких тяг 10 Каток 15 вібронавантажувача посаджено на вісь 14 з можливістю утворення його ексцентриситету та регулювання його величини Для цього в котку 15 для ВІСІ 14 виконано ексцентрично-фігурний виріз 31 з боковими пазами 32, в яких розміщено плоську шпонку 33, яка встановлена та закріплена в ВІСІ 14, а ця вісь для свого повздовжнього переміщення має обмежувальну шляпку 34 і, з другої сторони, - захватну ручку 35 /див, фіг 8, 9/, Використовують апарат слідуючим чином Можливі рухи рук і ніг пацієнта з функціонування всіх їх суглобів і основних м'язових груп в положенні сидячи, лежачи та стоячи з нахилом Сидячи передбачені рухівні дії у вигляді прямого педалювання ногами, руками, а також їх сумісними діями /див фіг 11-4/ Зокрема, можливі також рухи в позі сидячи, які представлені на фіг 11, і деякі ІНШІ Навантаження при цьому забезпечують сили гравітації під вагою тіла пацієнта, який сидить на СИДІННІ 5, станина 4 прямує вниз і, опираючись своїм ребром 16 на коток 15, притискає вібронавантажувач його катками 13 до напрямної хрестовини 1, стиская як ножицями та вижимаючи вперед катки вібронавантажувача до упору його штанги 18 в нижнє плече шатуна 8, який має обмежувачи свого провороту/не показано/ Пацієнт в положенні, вказаному на фіг1, випрямляє ноги, натискуючи на педалі 9, і вклинює катки 13 і 15 в основу цих ножиць В вихідне положення апарат повертається свавільно в наслідок розслаблення м'язів ніг після активного навантаженного випрямлення їх і послідуючого згинання в тазостегнових, колінних і гомілковостопних суглобах При прямому педалюванні ступні ніг пацієнта опираються на педалі і навантаження передається при цьому на м'язи ніг - розгинателі стегна, гомілки і ступні При захваті ногами м'яких петель 23 можливо виконання активних згибань ніг з випрямленого положення ноги згинають, підтягують їх до грудей, а потім з розслабленими м'язами апарат опускається в вихідне положення /не показано/ Руки при роботі ногами пасивні Вони розташовуються чи на рукоятках 11, чи на стегнах пацієнта, або в інших положеннях і навантаження не зазнають При навантаженні рук, навпаки ноги пасивні /знаходяться на педалях або на полу/, і пацієнт активно діє руками - згинає їх, відводячи назад і переміщує катки натягуванням гнучких тяг 10 /або змінних - жорстких ЗО/ за допомогою впливу на рукоятки 11 Можливі І розгинаючи рухи руками В цьому випадку рукоятки подаються вперед з вихідного положення - фіг 2 в положення - фіг 4, для чого використовують жорсткі ЗО тяги Повернення в вихідне положення 16 також свавільне при розслабленні м'язів рук Координацію рухів руками і ногами виконують в положення фіг 1 при активному взаємодіянні і на нижні і на верхні плечі шатунавідповідно напружуючи і розслаблюючи м'язи Позу тіла і нахили тулуба встановлюють за рахунок переміщення та фіксації спинки 6 на станини 4, як показано на схемі фіг 10 Можливі ІНШІ рухи, в тому числі і рухи в положенні стоячи з виконанням 'тяги" - розгибання тулуба з положення зігнувшись, як показано на Фіг 11 Так виконуються плавні рухи руками, ногами і тулубом, ефективність цього можна збільшити за рахунок вібрації Для цього вмикають вібратор 7 виставляють визначену величину ексцентриситета котка 15 вібронавантажувача Зняв навантаження, переміщюють шпонку 33 з центра цього котка в одну з пар пазов 32 виріза 31, раніше перемістив вісь 14 вправо та відпустив каток вниз, піднімаючи вверх штангу 18 і вертаючи в вихідне положення вісь 14, діючи на її ручку 35 При вказаних вище активних та пасивних рухах взаємодіючих з ребром 16 коток 15 буде провертатися й при присутності ексцентриситета обумовить коливальні рухи станіни 4, сидіння 5 і спинки з підголовником 6, що й створить требуему вібростимуляцію тіла пацієнта - його опорно-рухівного апарату і всіх органів системи його організму Регуліровка вібровпливу можлива по амплітуді шляхом встановлення шпонки 33 в різні пази 32, катка 15 і по частоті - шляхом змінення швидкості рухів кінцевостями Перевага запропонованого 16 порівнянні з прототипом є втому, що вдалось забезпечити рух та навантаження ніг, рук і тулуба пацієнта в різних, потрібних для механотерапії, позах - лежачи, сидячи й стоячи без використання всіляких традиційних навантажуючих пристосувань у вигляді пружин, пакеті в вантажів, фрикціонів, демпферів та др , а реалізуя для навантаження природні сили природи - її гравітацію, що забезпечує високий економічний ефект виробництва та експлуатації даного апарата Разом з тим, досягнено ВІДПОВІДНІСТЬ фізичного навантаження вимогам механотерапії й підвищення її ефективності терапевтичного діяння за рахунок забезпечення регулювання параметрів вібрації, теж створюючий без використання яких-небудь складених пристосувань, традиційного використання в подібних цілях Гадаємо, що запропонований механотерапевтичний апарат, знайде широке використання не тільки в лікувальних та профілактичних закладах, але й в особистому використанні громадян, так як він може бути виконай легким, пересувним і відносно недорогим, що вельми важливо в сучасних економічних умовах 58501 10 58501 •З,2 /Г Й 33 Й a 22 Комп'ютерна верстка С Волобусва Підписано до друку 05 09 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for mechanotherapy
Автори англійськоюPetrushevskyi Ivan Ivanovych, Kanishevskyi Stanislav Mykhailovych, Laputin Anatolii Mykolaiovych, Sychov Serhii Oleksandrovych
Назва патенту російськоюМеханотерапевтический аппарат
Автори російськоюПетрушевский Иван Иванович, Канишевский Станислав Михайлович, Лапутин Анатолий Николаевич, Сычев Сергей Александрович
МПК / Мітки
МПК: A63B 23/04, A63B 21/00, A61H 1/00
Мітки: механотерапевтичний, апарат
Код посилання
<a href="https://ua.patents.su/5-58501-mekhanoterapevtichnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Механотерапевтичний апарат</a>
Механотерапевтичний пристрій
Номер патенту: 57719
Опубліковано: 15.07.2003
Автори: Сичов Сергій Олександрович, Баранов Юрій Олексійович, Канішевський Станислав Михайлович, Петрушевський Іван Іванович
МПК: A61H 1/02, A63B 21/00, A63B 23/02
Мітки: пристрій, механотерапевтичний
Формула / Реферат:
Механотерапевтичний пристрій, що містить установлені в упорі сидіння, спинку, головотримач з манжетою і засіб створення навантаження, який відрізняється тим, що сидіння і спинка виконані у вигляді цілісного, пружного ложа, здатного приймати форму спини пацієнта, установленого шарнірно з можливістю зміни кута нахилу і фіксації на виконаній у вигляді хрестовини опорі, а головотримач виконаний безрозмірним і його манжета має підборідну і тім’яну...
Домашній механотерапевтичний пристрій
Номер патенту: 31112
Опубліковано: 15.12.2000
Автори: Лапутін Анатолій Миколайович, Петрушевський Іван Іванович, Хабінець Тамара Олександрівна, Канішевський Станислав Михайлович, Кольцова Наталія Олександрівна
МПК: A63B 23/00, A63B 21/00
Мітки: пристрій, механотерапевтичний, домашній
Текст:
...тканини, що пропускає повітря і вологу, має розрізні петлі 29 із зітискними гвинтами для фіксації на гнучній тязі або на ії карабінах 27 посередині між ними, кармани 30 для розміщення магнітних листових аплікаторів , наприклад, AJIM-!!, а на кінцях - липучки 26. Довжина його дозволяє одягати як на голову, так і на поперек пацієнта. На голові поясголовотримач утримується манжетою 31 з підборідним упором 32, виконаною зйомной (поміщенною в...
Насадковий тепломасообмінний апарат
Номер патенту: 790
Опубліковано: 15.03.2001
Автор: Мікульонок Ігор Олегович
МПК: B01J 19/32, B01D 53/18, B01J 19/16
Мітки: апарат, тепломасообмінний, насадковий
Формула / Реферат:
1. Насадковий тепломасообмінний апарат, що містить вертикальний корпус, днища, штуцери підведення й відводу легкої й важкої фаз, щонайменше одну горизонтальну розподілювальну решітку із закріпленими на ній вертикальними стержнями, на яких вільно встановлені насадкові тіла з наскрізним осьовим отвором, який відрізняється тим, що насадкові тіла виконані у вигляді тіл обертання, а на стержнях встановлені дистанційні елементи, відстань між якими...
Апарат для лікування захворювань суглобів, м’язів та сухожиль кисті руки
Номер патенту: 48896
Опубліковано: 15.08.2002
Автори: Грабовська Ольга Анатоліївна, Дець Василь Васильович, Якименко Олена Олександрівна
МПК: A61B 5/22
Мітки: руки, суглобів, кисті, сухожиль, м'язів, лікування, апарат, захворювань
Формула / Реферат:
Апарат для лікування захворювань суглобів, м'язів і сухожиль кисті руки, що включає термічну камеру з розташованим в ній датчиком, лічильником, вимірювальними елементами, реєстратором, перетворювачем, формувачем керувального сигналу, який відрізняється тим, що він додатково містить магнітотерапевтичний пристрій, вмонтований в термічну камеру.
Сопловий апарат парціальної турбіни
Номер патенту: 47496
Опубліковано: 15.07.2002
Автори: Геймбергер Юрій Олександрович, Передаренко Віктор Михайлович, Усатюк Леонід Михайлович
МПК: F01D 17/00
Мітки: парціальної, сопловий, апарат, турбіни
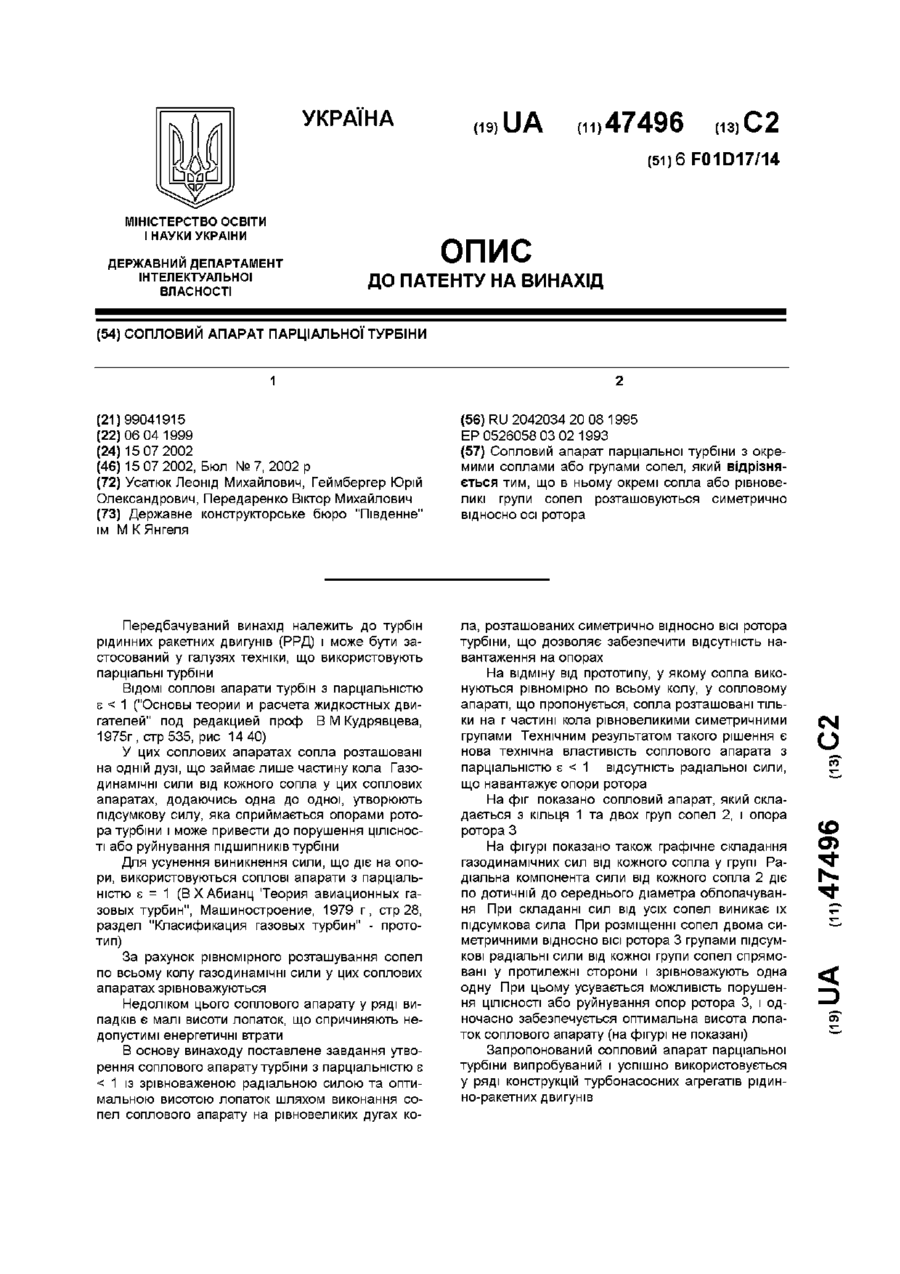
Формула / Реферат:
Сопловий апарат парціальної турбіни з окремими соплами або групами сопел, який відрізняється тим, що в ньому окремі сопла або рівновеликі групи сопел розташовуються симетрично відносно осі ротора.
Попередній патент: 5-аміно-4-етилсульфінілпіразоли, способи їх одержання, проміжні сполуки, пестицидні композиції та спосіб боротьби зі шкідниками
Наступний патент: Заміщені похідні 4-гідрокси-фенілалканоїнової кислоти конкурентної дії до аппр-g,
Випадковий патент: Спосіб і пристрій для вибору належного сектора обслуговування в системі передачі даних множинного доступу з кодовим розділенням каналів (варіанти)