Спосіб оцінки імовірності знаходження корабля в заданій смузі руху при використанні космічних навігаційних систем
Номер патенту: 59828
Опубліковано: 25.05.2011
Автори: Богдановський Олексій Миколайович, Залужний Руслан Миколайович, Ломоносов Сергій Євгенійович, Колежнюк Ігор Васильович
Формула / Реферат
Спосіб оцінки імовірності знаходження корабля в заданій смузі руху при використанні космічних навігаційних систем, який полягає в розрахунку достовірності навігаційних визначень з урахуванням помилки прийому радіонавігаційного сигналу у відповідності зі станом іоносфери на існуючий або прогнозований момент часу, який відрізняється тим, що визначення імовірності знаходження корабля в заданій смузі руху здійснюють в умовах використання тільки однієї космічної навігаційної системи залежно від стану трансіоносферного каналу передачі даних.
Текст
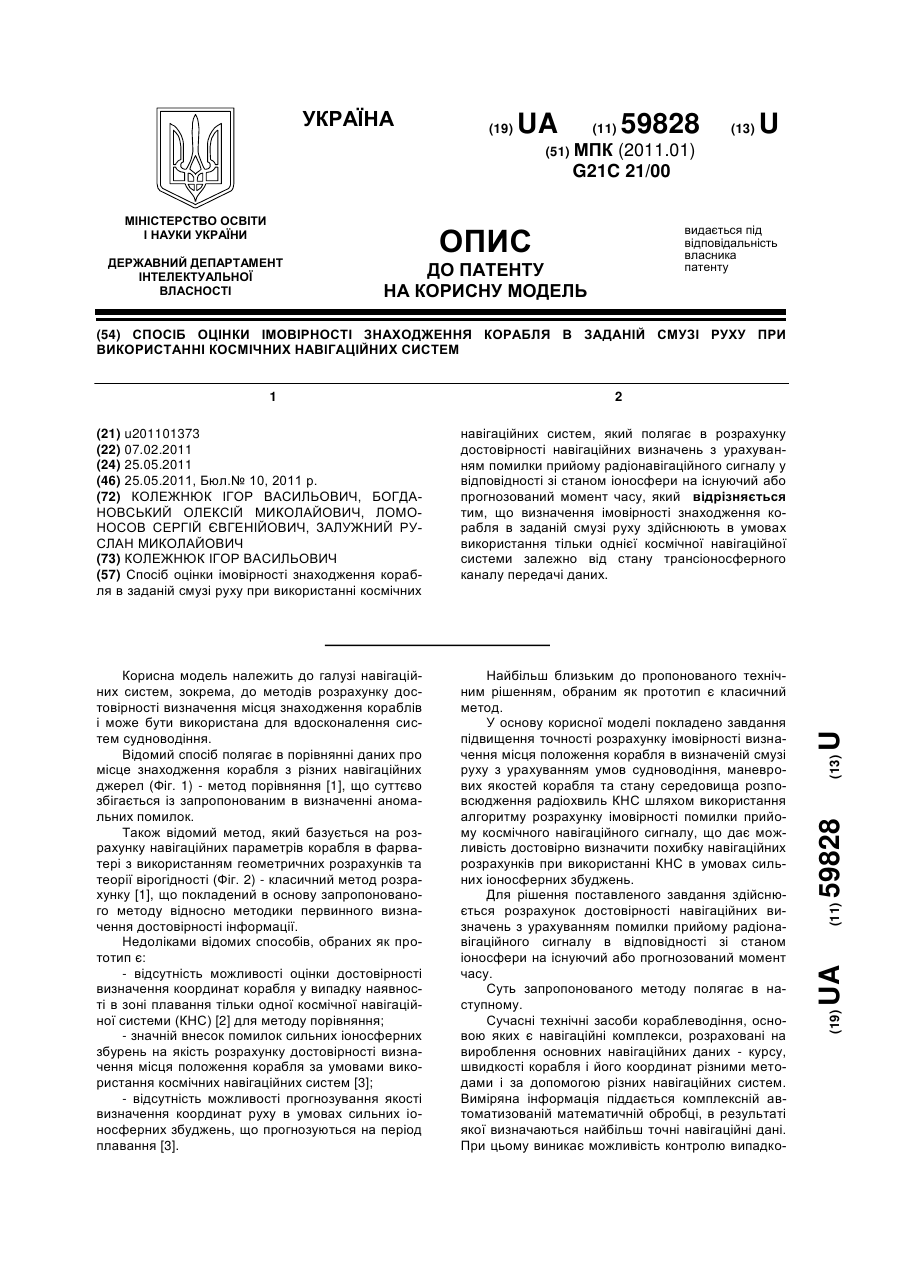
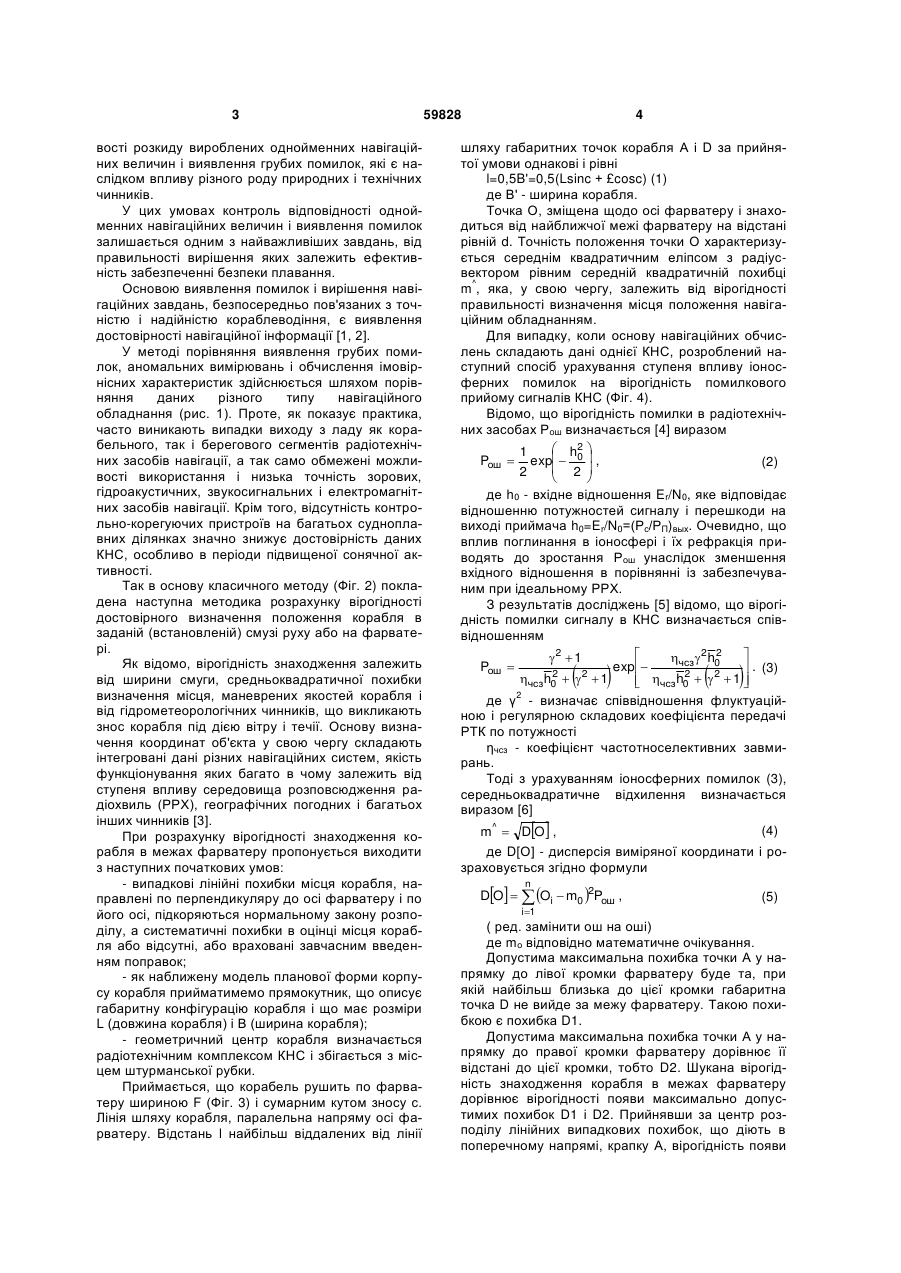
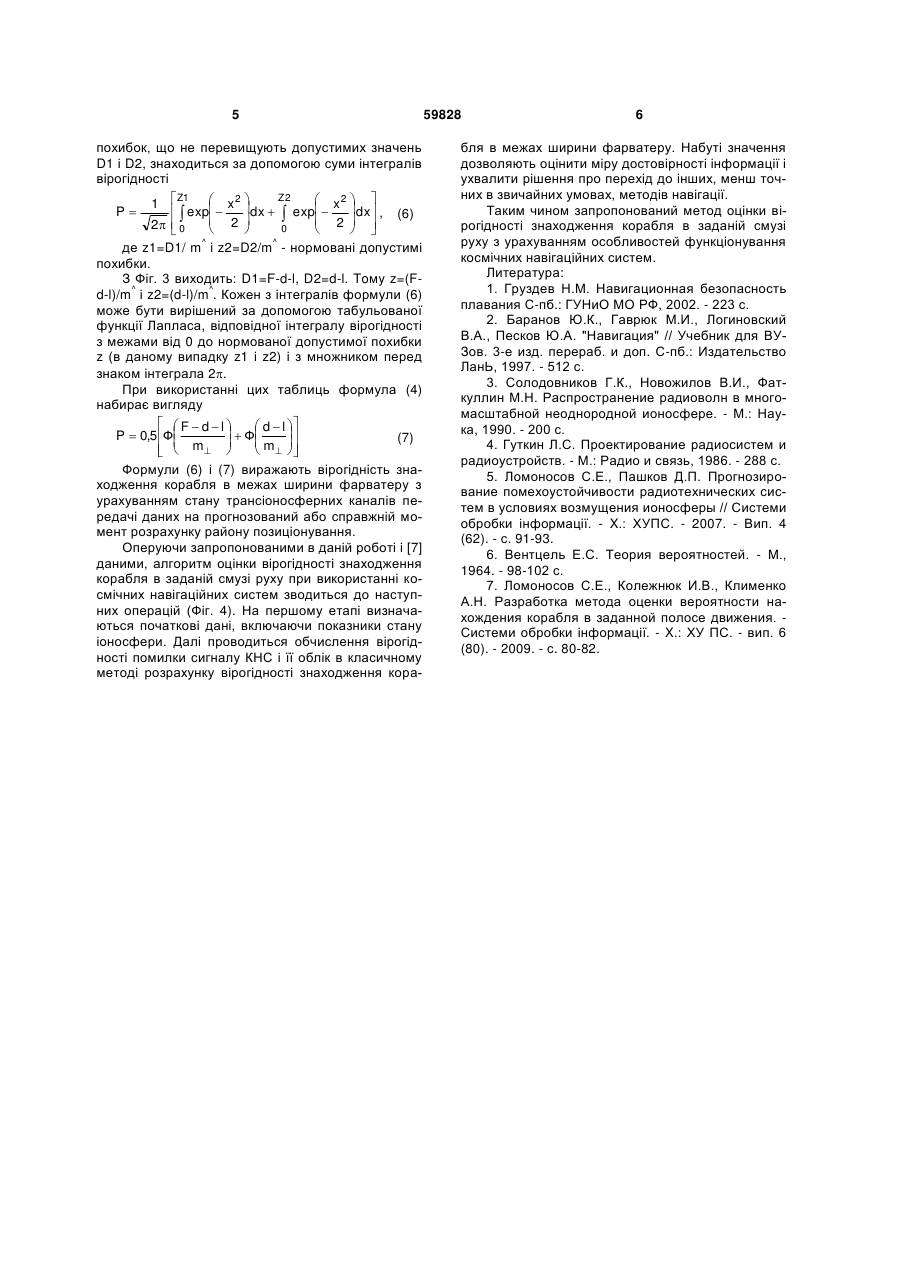
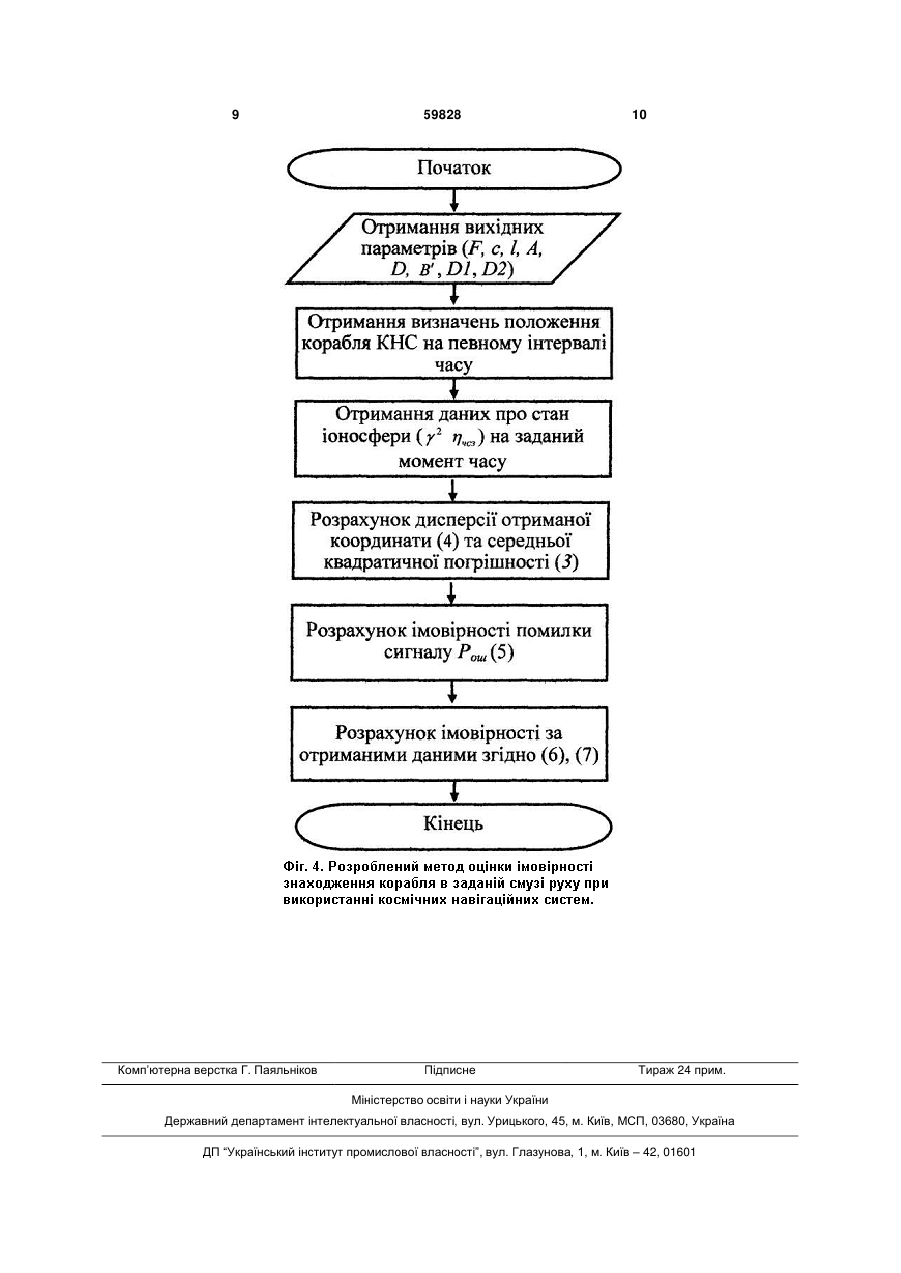
Спосіб оцінки імовірності знаходження корабля в заданій смузі руху при використанні космічних 3 вості розкиду вироблених однойменних навігаційних величин і виявлення грубих помилок, які є наслідком впливу різного роду природних і технічних чинників. У цих умовах контроль відповідності однойменних навігаційних величин і виявлення помилок залишається одним з найважливіших завдань, від правильності вирішення яких залежить ефективність забезпеченні безпеки плавання. Основою виявлення помилок і вирішення навігаційних завдань, безпосередньо пов'язаних з точністю і надійністю кораблеводіння, є виявлення достовірності навігаційної інформації [1, 2]. У методі порівняння виявлення грубих помилок, аномальних вимірювань і обчислення імовірнісних характеристик здійснюється шляхом порівняння даних різного типу навігаційного обладнання (рис. 1). Проте, як показує практика, часто виникають випадки виходу з ладу як корабельного, так і берегового сегментів радіотехнічних засобів навігації, а так само обмежені можливості використання і низька точність зорових, гідроакустичних, звукосигнальних і електромагнітних засобів навігації. Крім того, відсутність контрольно-корегуючих пристроїв на багатьох судноплавних ділянках значно знижує достовірність даних КНС, особливо в періоди підвищеної сонячної активності. Так в основу класичного методу (Фіг. 2) покладена наступна методика розрахунку вірогідності достовірного визначення положення корабля в заданій (встановленій) смузі руху або на фарватері. Як відомо, вірогідність знаходження залежить від ширини смуги, средньоквадратичної похибки визначення місця, маневрених якостей корабля і від гідрометеорологічних чинників, що викликають знос корабля під дією вітру і течії. Основу визначення координат об'єкта у свою чергу складають інтегровані дані різних навігаційних систем, якість функціонування яких багато в чому залежить від ступеня впливу середовища розповсюдження радіохвиль (РРХ), географічних погодних і багатьох інших чинників [3]. При розрахунку вірогідності знаходження корабля в межах фарватеру пропонується виходити з наступних початкових умов: - випадкові лінійні похибки місця корабля, направлені по перпендикуляру до осі фарватеру і по його осі, підкоряються нормальному закону розподілу, а систематичні похибки в оцінці місця корабля або відсутні, або враховані завчасним введенням поправок; - як наближену модель планової форми корпусу корабля прийматимемо прямокутник, що описує габаритну конфігурацію корабля і що має розміри L (довжина корабля) і В (ширина корабля); - геометричний центр корабля визначається радіотехнічним комплексом КНС і збігається з місцем штурманської рубки. Приймається, що корабель рушить по фарватеру шириною F (Фіг. 3) і сумарним кутом зносу с. Лінія шляху корабля, паралельна напряму осі фарватеру. Відстань l найбільш віддалених від лінії 59828 4 шляху габаритних точок корабля А і D за прийнятої умови однакові і рівні l=0,5B'=0,5(Lsinc + £cosc) (1) де В' - ширина корабля. Точка О, зміщена щодо осі фарватеру і знаходиться від найближчої межі фарватеру на відстані рівній d. Точність положення точки О характеризується середнім квадратичним еліпсом з радіусвектором рівним середній квадратичній похибці ^ m , яка, у свою чергу, залежить від вірогідності правильності визначення місця положення навігаційним обладнанням. Для випадку, коли основу навігаційних обчислень складають дані однієї КНС, розроблений наступний спосіб урахування ступеня впливу іоносферних помилок на вірогідність помилкового прийому сигналів КНС (Фіг. 4). Відомо, що вірогідність помилки в радіотехнічних засобах Рош визначається [4] виразом h2 1 Pош exp 0 , (2) 2 2 де h0 - вхідне відношення Er/N0, яке відповідає відношенню потужностей сигналу і перешкоди на виході приймача h0=Er/N0=(Рс/РП)вых. Очевидно, що вплив поглинання в іоносфері і їх рефракція приводять до зростання Рош унаслідок зменшення вхідного відношення в порівнянні із забезпечуваним при ідеальному РРХ. З результатів досліджень [5] відомо, що вірогідність помилки сигналу в КНС визначається співвідношенням 2 2 1 чсз 2 h0 Pош exp . (3) 2 2 2 2 чсз h0 1 чсз h0 1 2 де γ - визначає співвідношення флуктуаційною і регулярною складових коефіцієнта передачі РТК по потужності ηчсз - коефіцієнт частотноселективних завмирань. Тоді з урахуванням іоносферних помилок (3), середньоквадратичне відхилення визначається виразом [6] m^ DO , (4) де D[О] - дисперсія виміряної координати і розраховується згідно формули n DO Oi m0 2Pош , (5) i1 ( ред. замінити ош на оші) де mо відповідно математичне очікування. Допустима максимальна похибка точки А у напрямку до лівої кромки фарватеру буде та, при якій найбільш близька до цієї кромки габаритна точка D не вийде за межу фарватеру. Такою похибкою є похибка D1. Допустима максимальна похибка точки А у напрямку до правої кромки фарватеру дорівнює її відстані до цієї кромки, тобто D2. Шукана вірогідність знаходження корабля в межах фарватеру дорівнює вірогідності появи максимально допустимих похибок D1 і D2. Прийнявши за центр розподілу лінійних випадкових похибок, що діють в поперечному напрямі, крапку А, вірогідність появи 5 похибок, що не перевищують допустимих значень D1 і D2, знаходиться за допомогою суми інтегралів вірогідності Z2 2 1 Z1 x 2 dx exp x dx , (6) exp P 2 2 2 0 0 ^ ^ де z1=D1/ m i z2=D2/m - нормовані допустимі похибки. З Фіг. 3 виходить: D1=F-d-l, D2=d-l. Toмy z=(F^ ^ d-l)/m і z2=(d-l)/m . Кожен з інтегралів формули (6) може бути вирішений за допомогою табульованої функції Лапласа, відповідної інтегралу вірогідності з межами від 0 до нормованої допустимої похибки z (в даному випадку z1 і z2) і з множником перед знаком інтеграла 2. При використанні цих таблиць формула (4) набирає вигляду Fdl d l Ф P 0,5Ф (7) m m Формули (6) і (7) виражають вірогідність знаходження корабля в межах ширини фарватеру з урахуванням стану трансіоносферних каналів передачі даних на прогнозований або справжній момент розрахунку району позиціонування. Оперуючи запропонованими в даній роботі і [7] даними, алгоритм оцінки вірогідності знаходження корабля в заданій смузі руху при використанні космічних навігаційних систем зводиться до наступних операцій (Фіг. 4). На першому етапі визначаються початкові дані, включаючи показники стану іоносфери. Далі проводиться обчислення вірогідності помилки сигналу КНС і її облік в класичному методі розрахунку вірогідності знаходження кора 59828 6 бля в межах ширини фарватеру. Набуті значення дозволяють оцінити міру достовірності інформації і ухвалити рішення про перехід до інших, менш точних в звичайних умовах, методів навігації. Таким чином запропонований метод оцінки вірогідності знаходження корабля в заданій смузі руху з урахуванням особливостей функціонування космічних навігаційних систем. Литература: 1. Груздев Н.М. Навигационная безопасность плавания С-пб.: ГУНиО МО РФ, 2002. - 223 с. 2. Баранов Ю.К., Гаврюк М.И., Логиновский В.А., Песков Ю.А. "Навигация" // Учебник для ВУЗов. 3-е изд. перераб. и доп. С-пб.: Издательство ЛанЬ, 1997. - 512 с. 3. Солодовников Г.К., Новожилов В.И., Фаткуллин М.Н. Распространение радиоволн в многомасштабной неоднородной ионосфере. - М.: Наука, 1990. - 200 с. 4. Гуткин Л.С. Проектирование радиосистем и радиоустройств. - М.: Радио и связь, 1986. - 288 с. 5. Ломоносов С.Е., Пашков Д.П. Прогнозирование помехоустойчивости радиотехнических систем в условиях возмущения ионосферы // Системи обробки інформації. - X.: ХУПС. - 2007. - Вип. 4 (62). - с. 91-93. 6. Вентцель Е.С. Теория вероятностей. - М., 1964. - 98-102 с. 7. Ломоносов С.Е., Колежнюк И.В., Клименко А.Н. Разработка метода оценки вероятности нахождения корабля в заданной полосе движения. Системи обробки інформації. - X.: ХУ ПС. - вип. 6 (80). - 2009. - с. 80-82. 7 59828 8 9 Комп’ютерна верстка Г. Паяльніков 59828 Підписне 10 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for estimate of probability of ship location in preset strip of way with using space-based navigation system
Автори англійськоюKolezhniuk Ihor Vasyliovych, Bohdanovskyi Oleksii Mykolaiovych, Lomonosov Serhii Yevheniiovych, Zaluzhnyi Ruslan Mykolaiovych
Назва патенту російськоюСпособ оценки вероятности нахождения корабля в заданной полосе движения при испльзовании космических навигационных систем
Автори російськоюКолежнюк Игорь Васильевич, Богдановский Алексей Николаевич, Ломоносов Сергей Евгеньевич, Залужный Руслан Николаевич
МПК / Мітки
МПК: G21C 21/00
Мітки: знаходження, смузі, систем, космічних, навігаційних, корабля, руху, заданій, імовірності, оцінки, спосіб, використанні
Код посилання
<a href="https://ua.patents.su/5-59828-sposib-ocinki-imovirnosti-znakhodzhennya-korablya-v-zadanijj-smuzi-rukhu-pri-vikoristanni-kosmichnikh-navigacijjnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Спосіб оцінки імовірності знаходження корабля в заданій смузі руху при використанні космічних навігаційних систем</a>
Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Бутенко Ольга Станіславівна, Голкіна Валентина Василівна, Голкін Дмитро Васильович, Деденок Віктор Петрович
МПК: G01S 5/00
Мітки: космічних, орбіт, апаратів, спосіб, визначення, навігаційних
Текст:
...Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1...
Спосіб автоматизованої оцінки телеметричної інформації про стан бортових систем космічних апаратів
Номер патенту: 33404
Опубліковано: 25.06.2008
Автори: Загорулько Олександр Миколайович, Писанко Анатолій Григорович
МПК: B64G 1/24
Мітки: бортових, автоматизованої, космічних, стан, спосіб, апаратів, телеметричної, інформації, систем, оцінки
Формула / Реферат:
Спосіб автоматизованої оцінки телеметричної інформації про стан бортових систем космічних апаратів (КА), який полягає в тому, що отримують телеметричну інформацію, проводять попередню обробку телеметричної інформації, розраховують та формують статистичну модель стану космічного апарата, проводять аналіз статистичного стану, проводять сеанси керування з КА та здійснюють видачу керуючих впливів, який відрізняється тим, що після операції...
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем
Номер патенту: 65085
Опубліковано: 15.03.2004
Автори: Усенко Петро Якович, Піскорж Володимир Вікторович, Рудіч Олександр Васильович, Нестерович Андрій Геннадійович, Верещак Олександр Петрович, Семиволос Сергій Павлович
МПК: G01S 11/00, G01C 23/00
Мітки: радіонавігаційних, сеансу, вимірювань, супутникових, систем, спосіб, імітації, навігаційних
Формула / Реферат:
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем, який включає в себе вибір дати та інтервалу часу всередині даної дати, які визначають часовий інтервал імітації сеансу навігаційних вимірювань апаратури користувача, що контролюється; вибір типів супутникових радіонавігаційних систем, сигнали яких повинні імітуватись; вибір частотного діапазону навігаційних сигналів, що імітуються, космічних апаратів...
Спосіб і пристрій для навігаційних систем
Номер патенту: 91902
Опубліковано: 10.09.2010
Автори: Сюрйарінн Ярі, Аланен Кіммо
Мітки: спосіб, пристрій, навігаційних, систем
Формула / Реферат:
1. Пристрій (R) для позиціонування, що містить елемент (R.1.1) перевірки, адаптований аналізувати прийняті допоміжні дані, що стосуються щонайменше одної навігаційної системи, який відрізняється тим, що у зазначеному елементі перевірки (R.1.1), адаптованому аналізувати допоміжні дані для виявлення інформації, що стосується статусу зазначених одного або більше сигналів опорних станцій (S1, S2) щонайменше одної навігаційної системи, зазначена...
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем
Номер патенту: 69794
Опубліковано: 15.09.2004
Автори: Рудіч Олександр Васильович, Верещак Олександр Петрович, Нестерович Андрій Геннадійович, Піскорж Володимир Вікторович
Мітки: користувача, спосіб, сигналами, руху, супутникових, радіонавігаційних, визначення, параметрів, систем
Формула / Реферат:
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною...
Попередній патент: Пристрій для закупорювання скляних банок металевими кришками
Наступний патент: Шасі літака “сурмавіо”
Випадковий патент: Спосіб приготування лляної трести