Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем
Номер патенту: 69794
Опубліковано: 15.09.2004
Автори: Нестерович Андрій Геннадійович, Рудіч Олександр Васильович, Верещак Олександр Петрович, Піскорж Володимир Вікторович

Формула / Реферат
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною апаратурою користувача, на моменти часу прийому сигналів, псевдовідстаней та доплерівських зсувів частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарата, виділення з прийнятих радіосигналів космічних апаратів супутникових радіонавігаційних систем цифрової інформації, що передається цими радіосигналами, визначення моментів часу випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були прийняті навігаційною апаратурою користувача та оброблені в ній на моменти часу прийому сигналів з використанням визначених на ці моменти часу псевдовідстаней, визначення на моменти випромінювання навігаційних радіосигналів параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів, який відрізняється тим, що додатково виконують розміщення, в точках з відомими координатами, ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, в кількості, яка б доповнювала кількість космічних апаратів супутникових радіонавігаційних систем, радіосигнали яких безпосередньо приймає навігаційна апаратура користувача, до мінімально необхідної для визначення параметрів руху користувача кількості прийнятих радіосигналів, визначення координат фазових центрів приймальних та передавальних антен ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, визначення затримки та зміщення частоти радіосигналів під час їх проходження через апаратуру ретрансляторів, прийом приймальними антенами ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з наступним випромінюванням цих радіосигналів випромінювальними антенами ретрансляторів в напрямку розташування користувача, прийом навігаційною апаратурою користувача радіосигналів, які випромінюють ретранслятори навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, виділення в навігаційній апаратурі користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з радіосигналів, які випромінюють ретранслятори, визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були виділені з сигналів ретрансляторів на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого був виділений сигнал даного космічного апарата, псевдовідстаней та доплерівського зсуву частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарата, виділених з радіосигналів ретрансляторів, виділення для кожного космічного апарата, навігаційні радіосигнали якого були виділені з радіосигналів ретрансляторів, цифрової інформації, що передається в його радіосигналі, визначення для кожного космічного апарата радіонавігаційних систем, сигнали якого були виділені з радіосигналів ретрансляторів та оброблені на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого були виділені сигнали даного космічного апарата, моментів часу випромінювання навігаційних радіосигналів даного космічного апарата з використанням визначених на ці моменти часу відповідних псевдовідстаней, визначення на моменти випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були виділені з радіосигналів ретрансляторів, параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів, визначення на моменти часу прийому сигналів параметрів руху користувача за результатами визначення псевдовідстаней та доплерівських зсувів частоти, визначених за результатами обробки як безпосередньо прийнятих навігаційною апаратурою користувача, так і виділених із радіосигналів ретрансляторів, навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, шляхом розв'язання рівнянь, які пов'язують результати вимірювання псевдовідстаней та допплерівських зсувів частоти з відомими координатами приймальної та випромінювальної антен ретрансляторів, з визначеними затримкою та зміщенням частоти сигналів в апаратурі ретрансляторів, з визначеними на моменти часу випромінювання навігаційних радіосигналів параметрами руху космічних апаратів супутникових радіонавігаційних систем, з визначеними на ці моменти часу значеннями зміщення шкал часу та частоти цих космічних апаратів та з невідомими координатами, компонентами вектора швидкості та зміщеннями шкали часу та частоти навігаційної апаратури користувача.
Текст
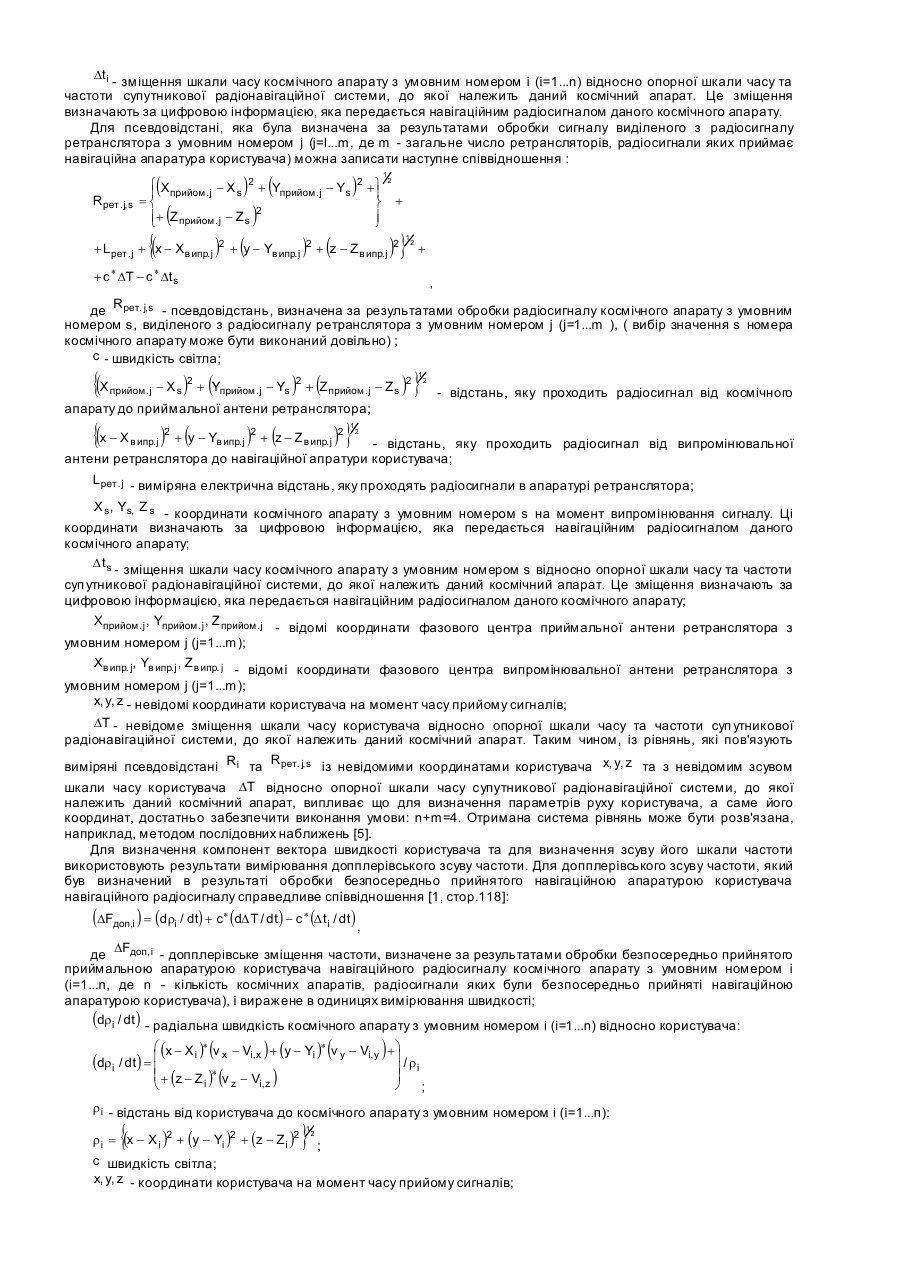
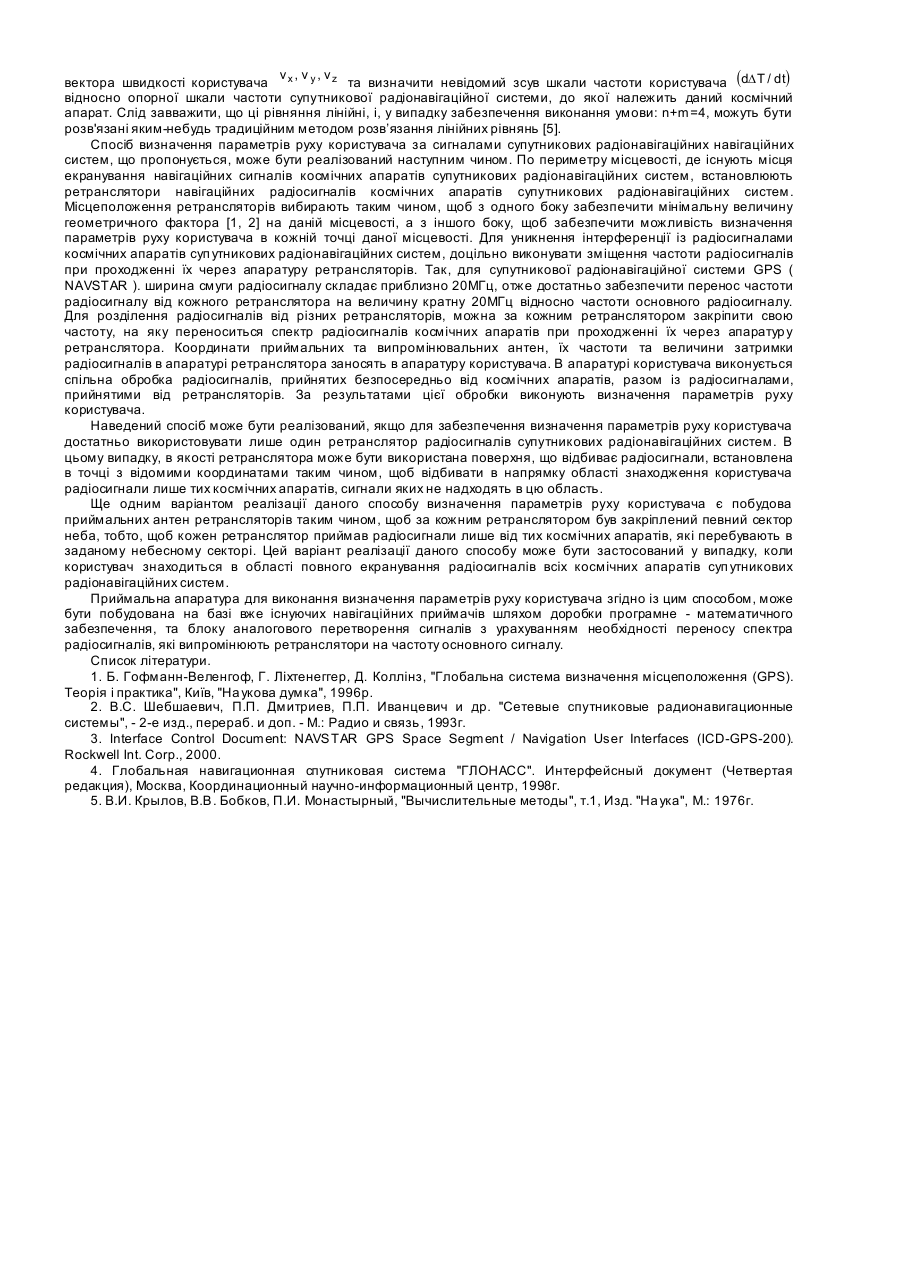
Винахід відноситься до радіотехніки, та може бути використаний для навігації рухомих об'єктів з використанням радіохвиль. Відомий спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, описаний наприклад в [1, стор.24-27] включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарату супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною апаратурою користувача, на моменти часу прийому сигналів, псевдовідстаней та допплерівських зсувів частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарату, виділення з прийнятих радіосигналів космічних апаратів супутникових радіонавігаційних систем цифрової інформації, що передається цими радіосигналами, визначення моментів часу випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були прийняті навігаційною апаратурою користувача та оброблені в ній на моменти часу прийому сигналів з використанням визначених на ці моменти часу псевдовідстаней, визначення на моменти випромінювання навігаційних радіосигналів параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів. Цей спосіб взятий в якості найближчого аналогу. Недоліком даного способу є те, що він не дозволяє виконувати визначення параметрів руху користувача в умовах, коли в точку місцезнаходження користувача надходять навігаційні радіосигнали від недостатньої, для забезпечення визначення параметрів руху користувача, кількості космічних апаратів супутникових радіонавігаційних систем. Достатня, для забезпечення визначення параметрів руху користувача, кількість космічних апаратів супутникових радіонавігаційних систем дорівнює сумі трьох невідомих координат користувача та числу шкал часу та частоти, встановлених для кожної з супутникових радіонавігаційних систем. Так, наприклад, для випадку, коли визначення параметрів руху користувача здійснюється по навігаційним радіосигналам космічних апаратів, які належать одній супутниковій радіонавігаційній системі, такій як GPS (NAVSTAR) або ГЛОНАСС, достатньо, щоб в точку місцезнаходження користувача надходили сигнали від чотирьох космічних апаратів, а для випадку, коли визначення параметрів руху користувача здійснюється по навігаційним радіосигналам космічних апаратів, які належать обом системам GPS (NAVSTAR) та ГЛОНАСС, які використовують різні шкали часу та частоти, ця кількість дорівнює п'яти [2]. В основу винаходу покладена задача створення способу визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, який дозволяв би виконувати визначення параметрів руху користувача в умовах, коли в точку місцезнаходження користувача надходять навігаційні радіосигнали від недостатньої, для забезпечення визначення параметрів руху користувача, кількості космічних апаратів суп утникових радіонавігаційних систем, шляхом утворення додаткових трас поширення навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем та впливом на параметри їх радіосигналів на цих трасах. Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, яким вирішується поставлена задача, включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарату супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною апаратурою користувача, на моменти часу прийому сигналів, псевдовідстаней та допплерівських зсувів частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарату, виділення з прийнятих радіосигналів космічних апаратів супутникових радіонавігаційних систем цифрової інформації, що передається цими радіосигналами, визначення моментів часу випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були прийняті навігаційною апаратурою користувача та оброблені в ній на моменти часу прийому сигналів з використанням визначених на ці моменти часу псевдовідстаней, визначення на моменти випромінювання навігаційних радіосигналів параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів, який відрізняється тим, що додатково виконують розміщення, в точках з відомими координатами, ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, в кількості, яка б доповнювала кількість космічних апаратів суп утникових радіонавігаційних систем, радіосигнали яких безпосередньо приймає навігаційна апаратура користувача, до мінімально необхідної для визначення параметрів руху користувача кількості прийнятих радіосигналів, визначення координат фазових центрів приймальних та передавальних антен ретрансляторів навігаційних радіосигналів космічних апаратів суп утникових радіонавігаційних систем, визначення затримки та зміщення частоти радіосигналів під час їх проходження через апаратуру ретрансляторів, прийом приймальними антенами ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з наступним випромінюванням цих радіосигналів випромінювальними антенами ретрансляторів в напрямку розташування користувача, прийом навігаційною апаратурою користувача радіосигналів, які випромінюють ретранслятори навігаційних радіосигналів космічних апаратів суп утникових радіонавігаційних систем, виділення в навігаційній апаратурі користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з радіосигналів, які випромінюють ретранслятори, визначення для кожного космічного апарату супутникових радіонавігаційних систем, сигнали якого були виділені з сигналів ретрансляторів на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого був виділений сигнал даного космічного апарату, псевдовідстаней та допплерівського зсуву частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарату, виділених з радіосигналів ретрансляторів, виділення для кожного космічного апарату, навігаційні радіосигнали якого були виділені з радіосигналів ретрансляторів, цифрової інформації, що передається в його радіосигналі, визначення для кожного космічного апарату радіонавігаційних систем, сигнали якого були виділені з радіосигналів ретрансляторів та оброблені на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого були виділені сигнали даного космічного апарату, моментів часу випромінювання навігаційних радіосигналів даного космічного апарату з використанням визначених на ці моменти часу відповідних псевдовідстаней, визначення на моменти випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були виділені з радіосигналів ретрансляторів, параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів, визначення на моменти часу прийому сигналів параметрів руху користувача за результатами визначення псевдовідстаней та допплерівських зсувів частоти, визначених за результатами обробки як безпосередньо прийнятих навігаційною апаратурою користувача, так і виділених із радіосигналів ретрансляторів, навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, шляхом розв'язання рівнянь, які пов'язують результати вимірювання псевдовідстаней та допплерівських зсувів частоти з відомими координатами приймальної та випромінювальної антен ретрансляторів, з визначеними затримкою та зміщенням частоти сигналів в апаратурі ретрансляторів, з визначеними на моменти часу випромінювання навігаційних радіосигналів параметрами руху космічних апаратів супутникових радіонавігаційних систем, з визначеними на ці моменти часу значеннями зміщення шкал часу та часто ти цих космічних апаратів, та з невідомими координатами, компонентами вектора швидкості та зміщеннями шкали часу та часто ти навігаційної апаратури користувача. Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що заявляється, у відомих джерелах не виявлений, що дозволяє вважати його новим. Відмінні ознаки в своїй сукупності є необхідними і достатніми для досягнення поставленої мети, в інших відомих технічних рішеннях не виявлені, що забезпечує винаходу відповідність критерію «винахідницький рівень». Введення нових ознак способу визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем є необхідним і достатнім для здійснення визначення параметрів руху користувача в місцях наявності екранування навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем. Кожна окремо взята ознака та всі разом узяті в заданій послідовності служать для досягнення поставленої задачі. Реалізація наведеного способу дозволяє провадити визначення параметрів руху користувача за сигналами суп утникових радіонавігаційних систем в умовах, коли в точку місцезнаходження користувача надходять навігаційні радіосигнали від недостатньої, для забезпечення визначення параметрів руху користувача, кількості космічних апаратів супутникових радіонавігаційних систем. Достатня, для забезпечення визначення параметрів руху користувача, кількість космічних апаратів супутникових радіонавігаційних систем дорівнює сумі трьох невідомих координат користувача та числу шкал часу та частоти, встановлених для кожної з супутникових радіонавігаційних систем [2]. Додатковим результатом способу визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем є те, що він дозволяє підвищити точність визначення параметрів руху користувача в умовах наявності безпосереднього прийому навігаційних радіосигналів від достатньої, для визначення параметрів руху користувача, кількості космічних апаратів, за рахунок формування в реальному часі диференціальних поправок безпосередньо в навігаційній апаратурі користувача. Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що пропонується, також дозволяє підвищити точність визначення параметрів руху користувача в умовах наявності безпосереднього прийому навігаційних радіосигналів від достатньої, для визначення параметрів руху користувача, кількості космічних апаратів, шля хом здійснення визначення відносних координат користувача та приймальної антени ретранслятора. Сутність винаходу полягає в наступному. Згідно зі способом визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що пропонується, виконують прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем. Навігаційна апаратура користувача може здійснювати прийом радіосигналів лише тих космічних апаратів, для яких лінія, яка з'єднує космічний апарат із користувачем, не перетинає жоден матеріальний об'єкт. Таким матеріальним об'єктом може бути поверхня Землі, будинки, гори тощо; завдання навігаційною апаратурою користувача моментів часу прийому сигналів. Ці моменти часу формує опорний генератор навігаційної апаратури користувача. Обробка навігаційних радіосигналів виконується таким чином, щоб всі параметри , визначені під час обробки радіосигналів, були прив'язані саме до цих моментів часу прийому сигналів; визначення для кожного космічного апарату супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною апаратурою користувача, на моменти часу прийому сигналів, псевдовідстаней та допплерівських зсувів частоти за результатами обробки в навігаційній апаратурі користувача навігаційних радіосигналів даного космічного апарату. Псевдовідстань визначають за результатами вимірювання фази радіосигналу ( кодової або фазової) на момент часу прийому радіосигналу шля хом додавання цілого числа довжин хвиль, визначеного при розв'язанні фазової неоднозначності [1 стор.34-35, 114-118]. Найбільш легко виконати розв'язання фазової неоднозначності для кодової фази. Це пов'язано із тим, що довжина хвилі, яка відповідає кодовому сигналу складає досить велику величину. Так для суп утникових радіонавігаційних систем GPS (NAVSTAR) та ГЛО-НАСС вона складає приблизно 300км, в той час як фаза несучої для цих систем має величину порядку 20см [2]. Допплерівський зсув частоти визначають як різницю між частотою прийнятого радіосигналу та часто тою опорного сигналу, який формується в навігаційній апаратурі користувача [1 стор.99100]; виділення з прийнятих радіосигналів космічних апаратів супутникових радіонавігаційних систем цифрової інформації, що передається цими радіосигналами. В цифровій інформації містяться дані, які дозволяють обчислити на будь-який заданий момент часу параметри руху та зміщення шкал часу та частоти даного космічного апарату відносно опорної шкали часу та частоти, яка була прийнята в супутниковій радіонавігаційній системі, до якої належить даний космічний апарат. Виділення даних виконують згідно з форматом даних, описаним в документації на дану суп утникову систему ( для GPS (NAVSTAR) див. [3], а для ГЛОНАСС див. [4]). визначення моментів часу випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були прийняті навігаційною апаратурою користувача та оброблені в ній на моменти часу прийому сигналів з використанням визначених на ці моменти часу псевдовідстаней. Величина псевдовідстані пов'язана із моментами часу прийому та випромінювання сигналу співвідношенням [1 стор.114118]: R=c*(tпр-tвип), де R - виміряна псевдовідстань для даного космічного апарату; с - швидкість світла; tnp - час прийому сигналу, який задає навігаційна апаратура користувача; tвип - час випромінювання радіосигналу, визначений в шкалі часу даного космічного апарату. Оскільки в цьому співвідношенні час прийому сигналу tnp задає навігаційна апаратура користувача, псевдовідстань R визначена внаслідок обробки радіосигналу, то час випромінювання може бути визначений з рівняння: tвип-tnp-R/c; визначення на моменти випромінювання навігаційних радіосигналів параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів. Ця операція виконується згідно із документацією на дану супутникову радіонавігаційну систему (для GPS (NAVSTAR) див.[3], а для ГЛОНАСС див.[4]); розміщення, в точках з відомими координатами, ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, в кількості, яка б доповнювала кількість космічних апаратів суп утникових радіонавігаційних систем, радіосигнали яких безпосередньо приймає навігаційна апаратура користувача, до мінімально необхідної для визначення параметрів руху користувача кількості прийнятих радіосигналів. Ретранслятори застосовують для того, щоб сформувати нові траси поширення навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем. Псевдовідстань та допплерівський зсув частоти, визначені за результатами обробки в навігаційній апаратурі користувача навігаційного радіосигналу якого-небудь космічного апарату, сигнал якого був виділений з радіосигналу ретранслятора, використовують для доповнення кількості псевдовідстаней та допплерівських зсувів часто ти, визначених в результаті обробки радіосигналів, які безпосередньо приймає навігаційна апаратура користувача, до кількості, яка буде достатньою для визначення параметрів руху користувача. Доста тня для визначення параметрів руху користувача кількість космічних апаратів супутникових радіонавігаційних систем дорівнює сумі трьох невідомих координат користувача та кількості шкал часу та частоти, які використовують суп утникові радіонавігаційні системи. Так, наприклад, у випадку, коли визначення параметрів руху користувача виконується по навігаційним радіосигналам космічних апаратів, які належать одній супутниковій радіонавігаційній системі, такій як GPS (NAVSTAR) або ГЛОНАСС, ця кількість дорівнює чотирьом [1, стор.24-27], тобто сумарна кількість ретрансляторів та космічних апаратів суп утникової радіонавігаційної системи, сигнали яких надходять на приймальну апаратуру користувача, повинна бути не меншою чотирьох. У випадку, коли визначення параметрів руху користувача виконується по навігаційним радіосигналам космічних апаратів, які належать двом різним супутниковим радіонавігаційним системам, наприклад GPS (NAVSTAR) та ГЛОНАСС, ця кількість дорівнює п'яти [2], а отже сумарна кількість ретрансляторів та космічних апаратів суп утникових радіонавігаційних систем, сигнали яких надходять на приймальну апаратур у користувача, повинна бути не меншою цієї кількості. Така відмінність у кількості мінімально необхідного числа сигналів пов'язана із тим, що кожна супутникова радіонавігаційна система як правило використовує свою опорну шкалу часу та частоти. Тому при визначені параметрів руху користувача необхідно оцінювати зміщення шкал часу та часто ти навігаційної апаратури користувача відносно опорної шкали часу та частоти кожної із суп утникових радіонавігаційних систем [2]; визначення координат фазових центрів приймальних та передавальних антен ретрансляторів навігаційних радіосигналів космічних апаратів суп утникових радіонавігаційних систем, та визначення затримки та зміщення частоти радіосигналів під час їх проходження через апаратуру ретрансляторів. Ці операції виконують для того, щоб в рівняннях для псевдовідстаней та допплерівських зсувів частоти, визначених в результаті обробки сигналів космічних апаратів, які були виділені з радіосигналів ретрансляторів, невідомими залишились лише координати, компоненти вектора швидкості та величини зміщення шкали часу та частоти навігаційної апаратури користувача; прийом приймальними антенами ретрансляторів навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з наступним випромінюванням цих радіосигналів випромінювальними антенами ретрансляторів в напрямку розташування користувача. Ця операція забезпечує утворення додаткових трас поширення радіосигналів космічних апаратів суп утникових радіонавігаційних систем в напрямку користувача; прийом навігаційною апаратурою користувача радіосигналів, які випромінюють ретранслятори навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем. Ці сигнали повинні доповнювати радіосигнали космічних апаратів супутникових радіонавігаційних систем до достатнього, для виконання визначення параметрів руху користувача, числа навігаційних сигналів; виділення в навігаційній апаратурі користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем з радіосигналів, які випромінюють ретранслятори. Радіосигнал ретранслятора складається із суміші навігаційних радіосигналів всіх космічних апаратів супутникових радіонавігаційних систем, сигнали яких надійшли на приймальну антену ретранслятора. Оскільки в цій суміші радіосигнали всіх космічних апаратів проходять спільну трасу "ретранслятор-користувач", і затримка та зміщення частоти радіосигналу саме на цій трасі залежать від параметрів руху користувача, то недоцільно виділяти сигнали всіх космічних апаратів з радіосигналу користувача. Вибір космічних апаратів доцільно виконувати з числа тих космічних апаратів суп утникових радіонавігаційних систем, радіосигнали яких безпосередньо приймає навігаційна апаратура користувача, причому для розв'язання задачі визначення параметрів руху користувача з радіосигналу кожного ретранслятора достатньо виділяти сигнал одного космічного апарату; визначення для кожного космічного апарату супутникових радіонавігаційних систем, сигнали якого були виділені з сигналів ретрансляторів на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого був виділений сигнал даного космічного апарату, псевдовідстаней та допплерівського зсуву частоти за результатами обробки в навігаційній апаратурі користувача навігаційний радіосигналів даного космічного апарату, виділених з радіосигналів ретрансляторів. Ці операції виконують для того, щоб доповнити псевдовідстані та величин допплерівських зсувів часто ти, визначених за результатами обробки безпосередньо прийнятих навігаційною апаратурою користувача радіосигналів космічних апаратів супутникових радіонавігаційних систем, до достатнього для визначення параметрів руху користувача числа; виділення для кожного космічного апарату, навігаційні радіосигнали якого були виділені з радіосигналів ретрансляторів, цифрової інформації, що передається в його радіосигналі. Виділення цифрової інформації необхідно для тих космічних апаратів, радіосигнали яких не надходять безпосередньо на приймальну антену навігаційної апаратури користувача. В цифровій інформації, яка передається навігаційним радіосигналом космічного апарата супутникових радіонавігаційних систем, містяться дані необхідні для прогнозу координат та вектора швидкості космічного апарату на будь - який заданий момент часу, а також дані. які дозволяють визначити зміщення шкали часу та частоти супутника відносно опорної шкали часу та частоти, яка використовується в супутниковій радіонавігаційній системі, до якої належить даний космічний апарат (для GPS(NAVSTAR) див. [3], а для ГЛОНАСС див. [4]); визначення для кожного космічного апарату радіонавігаційних систем, сигнали якого були виділені з радіосигналів ретрансляторів та оброблені на моменти часу прийому сигналів, і для кожного ретранслятора, з радіосигналу якого були виділені сигнали даного космічного апарату, моментів часу випромінювання навігаційних радіосигналів даного космічного апарату з використанням визначених на ці моменти часу відповідних псевдовідстаней. Для псевдовідстані, яка визначена за результатами обробки навігаційного радіосигналу, виділеного з радіосигналу ретранслятора, з урахуванням фізичного змісту такого параметру, як псевдовідстань [1, стор.34-35, 114-118], буде справедливим наступне співвідношення : R=c*(tпр-tвип), де R - виміряна псевдовідстань для даного космічного апарату; с - швидкість світла; tnp - час прийому сигналу, який задає навігаційна апаратура користувача; tвип - час випромінювання радіосигналу, визначений в шкалі часу даного космічного апарату. Оскільки в цьому співвідношенні час прийму сигналу tnp відомий, а псевдовідстань R визначена внаслідок обробки радіосигналу, то час випромінювання може бути визначений з рівняння: tвип=tnp-R/c; визначення на моменти випромінювання навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, сигнали яких були виділені з радіосигналів ретрансляторів, параметрів руху та зміщення шкали часу та частоти відповідних космічних апаратів супутникових радіонавігаційних систем з використанням цифрової інформації, що передається в навігаційному радіосигналі цих космічних апаратів. Ця операція виконується згідно із документацією на дану супутникову радіонавігаційну систему (для GPS (NAVSTAR) див.[3], а для ГЛОН АСС див. [4]); визначення на моменти часу прийому сигналів параметрів руху користувача за результатами визначення псевдовідстаней та допплерівських зсувів частоти, визначених за результатами обробки як безпосередньо прийнятих навігаційною апаратурою користувача, так і виділених із радіосигналів ретрансляторів, навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, шляхом розв'язання рівнянь, які пов'язують результати вимірювання псевдовідстаней та допплерівських зсувів частоти з відомими координатами приймальної та випромінювальної антен ретрансляторів, з визначеними затримкою та зміщенням частоти сигналів в апаратурі ретрансляторів, з визначеними на моменти часу випромінювання навігаційних радіосигналів параметрами руху космічних апаратів супутникових радіонавігаційних систем, з визначеними на ці моменти часу значеннями зміщення шкал часу та часто ти цих космічних апаратів, та з невідомими координатами, компонентами вектора швидкості та зміщеннями шкали часу та частоти навігаційної апаратури користувача. Для псевдовідстані, яка була визначена за результатами обробки безпосередньо прийнятого навігаційною апаратурою користувача навігаційного радіосигналу справедливе співвідношення [1, стор.212-231]: { Ri = (x - X i )2 + (y - Yi )2 + (z - Z i )2 } 1 2 + c *D t i - c *D T , де Ri - псевдовідстань, визначена за результатами обробки безпосередньо прийнятого приймальною апаратурою користувача навігаційного радіосигналу космічного апарату з умовним номером і (і=1...n, де nкількість космічних апаратів, радіосигнали яких були безпосередньо прийняті навігаційною апаратурою користувача); c - швидкість світла; x, y, z - невідомі координати користувача на момент часу прийому сигналів; DT - невідоме зміщення шкали часу користувача відносно опорної шкали часу та частоти суп утникової радіонавігаційної системи, до якої належить даний космічний апарат; Xi , Yi, Zi j - координати космічного апарату з умовним номером і (і=1...n) на момент випромінювання сигналу. Ці координати визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; Dt i - зміщення шкали часу космічного апарату з умовним номером і (і=1...n) відносно опорної шкали часу та частоти супутникової радіонавігаційної системи, до якої належить даний космічний апарат. Це зміщення визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату. Для псевдовідстані, яка була визначена за результатами обробки сигналу виділеного з радіосигналу ретранслятора з умовним номером j (j=l...m, де m - загальне число ретрансляторів, радіосигнали яких приймає навігаційна апаратура користувача) можна записати наступне співвідношення : ( ) ( )2 + ü ï Rрет . j, s ý + ( ) ï þ 2 2 + Lрет . j + {x - Xв ипр. j ) + (y - Yв ипр. j ) + (z - Z в ипр. j )2 } ( 1 ì Xприйом . j - X s 2 + Yприйом . j - Ys ï =í ï+ Z прийом . j - Z s 2 î 2 1 * 2 + * + c DT - c Dt s , де R рет. j, s - псевдовідстань, визначена за результатами обробки радіосигналу космічного апарату з умовним номером s, виділеного з радіосигналу ретранслятора з умовним номером j (j=1...m ), ( вибір значення s номера космічного апарату може бути виконаний довільно) ; c - швидкість світла; {(X - Xs прийом . j )2 + (Yприйом.j - Ys )2 + (Z прийом.j - Z s )2 } 1 2 - відстань, яку проходить радіосигнал від космічного апарату до приймальної антени ретранслятора; {(x - X )2 + (y - Yв ипр.j )2 + (z - Z в ипр.j )2 } 1 в ипр. j 2 - відстань, яку проходить радіосигнал від випромінювальної антени ретранслятора до навігаційної апратури користувача; L рет . j - виміряна електрична відстань, яку проходять радіосигнали в апаратурі ретранслятора; X s , Ys, Z s - координати космічного апарату з умовним номером s на момент випромінювання сигналу. Ці координати визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; D t s - зміщення шкали часу космічного апарату з умовним номером s відносно опорної шкали часу та частоти суп утникової радіонавігаційної системи, до якої належить даний космічний апарат. Це зміщення визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; Xприйом . j , Yприйом . j , Z прийом . j - відомі координати фазового центра приймальної антени ретранслятора з умовним номером j (j=1...m); Xв ипр. j, Yв ипр. j , Z в ипр. j - відомі координати фазового центра випромінювальної антени ретранслятора з умовним номером j (j=1...m); x, y, z - невідомі координати користувача на момент часу прийому сигналів; DT - невідоме зміщення шкали часу користувача відносно опорної шкали часу та частоти суп утникової радіонавігаційної системи, до якої належить даний космічний апарат. Таким чином, із рівнянь, які пов'язують R виміряні псевдовідстані Ri та рет. j, s із невідомими координатами користувача x, y, z та з невідомим зсувом шкали часу користувача DT відносно опорної шкали часу супутникової радіонавігаційної системи, до якої належить даний космічний апарат, випливає що для визначення параметрів руху користувача, а саме його координат, достатньо забезпечити виконання умови: n+m=4. Отримана система рівнянь може бути розв'язана, наприклад, методом послідовних наближень [5]. Для визначення компонент вектора швидкості користувача та для визначення зсуву його шкали частоти використовують результати вимірювання допплерівського зсуву частоти. Для допплерівського зсуву частоти, який був визначений в результаті обробки безпосередньо прийнятого навігаційною апаратурою користувача навігаційного радіосигналу справедливе співвідношення [1, стор.118]: (DFдоп,і ) = (dri / dt) + c* (dD T / dt ) - c * (D t i / dt ) , де DFдоп, і - допплерівське зміщення частоти, визначене за результатами обробки безпосередньо прийнятого приймальною апаратурою користувача навігаційного радіосигналу космічного апарату з умовним номером і (і=1...n, де n - кількість космічних апаратів, радіосигнали яких були безпосередньо прийняті навігаційною апаратурою користувача), і виражене в одиницях вимірювання швидкості; (dri / dt ) - радіальна швидкість космічного апарату з умовним номером і (і=1...n) відносно користувача: ( ) æ (x - X i )* (v x - Vi, x ) + (y - Yi )* v y - Vi, y + ö ÷ /r ÷ i ç + (z - Z i )* (v z - Vi, z ) ÷ è ø (dri / dt ) = ç ç ; r i - відстань від користувача до космічного апарату з умовним номером і (і=1...п): { } 1 ri = (x - X i )2 + (y - Yi )2 + (z - Z i )2 ; c швидкість світла; x, y, z - координати користувача на момент часу прийому сигналів; 2 vx, v y, vz - компоненти вектора швидкості користувача; Xi , Yi, Zi - координати космічного апарату з умовним номером і (і=1...n) на момент випромінювання сигналу. Ці координати визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; Vi, x , Vi, y , Vi, z - компоненти вектора швидкості космічного апарату з умовним номером і (і=1...n) на момент випромінювання сигналу. Ці величини визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; (dD T / dt ) - невідоме зміщення шкали частоти користувача відносно опорної шкали часу та частоти суп утникової радіонавігаційної системи, до якої належить даний космічний апарат; (Dt i / dt ) - зміщення шкали частоти космічного апарату з умовним номером і (і=1...n) відносно опорної шкали часу та часто ти супутникової радіонавігаційної системи, до якої належить даний космічний апарат. Це зміщення визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату. Для допплерівського зсуву частоти, який був визначений за результатами обробки сигналу виділеного з радіосигналу ретранслятора з умовним номером j (j=1...m, де m - загальне число ретрансляторів, радіосигнали яких приймає навігаційна апаратура користувача) можна записати наступне співвідношення : (D Fдоп ,s,j ) = (drs, j / dt ) + (dr j / dt ) + DFрет.j + с * (dDT / dt ) - c * (D t s / dt ) , де DFдоп, s, j - допплерівське зміщення частоти, визначене за результатами обробки радіосигналу космічного апарату з умовним номером s, виділеного з радіосигналу ретранслятора з умовним номером j (j=1...m); c - швидкість світла; d r s, j / dt - радіальна швидкість космічного апарату з умовним номером s відносно ретранслятора з умовним ( ) номером j (j = 1...m): ( ) ( ) æ X s - Xприйом . j * Vs, x + Ys - Yприйом . j * Vs, y + ö ÷/r dr s, j / dt = ç ç ÷ s,j ç + Z s - Z прийом . j * Vs, z ÷ è ø ; ( ) ( ) r s, j - відстань, яку проходить радіосигнал від космічного апарату з умовним номером s до ретранслятора з умовним номером j (j=1...m): {( r s, j = Xприйом . j - X s )2 + (Yприйом.j - Ys )2 + (Zприйом.j - Z s )2 } 1 2 ; Xприйом . j , Yприйом . j , Z прийом . j - відомі координати фазового центра приймальної антени ретранслятора з умовним номером j (j=1...m); Xs , Ys, Z s - координати космічного апарату з умовним номером s на момент випромінювання сигналу. Ці координати визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; Vs , x , Vs, y , Vs, z - компоненти вектора швидкості космічного апарату з умовним номером s на момент випромінювання сигналу. Ці параметри визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату; d r j / dt - радіальна швидкість користувача відносно ретранслятора з умовним номером j (j=1...m): ( ) (dr j / dt ) = ((x - Xв ипр.j )* v x + (y - Yв ипр.j )* v y + (z - Zв ипр. j )* v z )/ r j ; rj - відстань, яку проходить радіосигнал від випромінювальної антени ретранслятора до навігаційної апаратури користувача: {( r j = x - X в ипр. j )2 + (y - Yв ипр.j )2 + (z - Z в ипр.j )2 } 1 2 ; Xв ипр. j, Yв ипр. j , Z в ипр. j - відомі координати фазового центра випромінювальної антени ретранслятора з умовним номером j (j=1...m); x, y, z - координати користувача на момент часу прийому сигналів; vx, v y, vz - компоненти вектора швидкості користувача; DFрет . j - виміряна величина зсуву частоти радіосигналів, яка виникає при проходженні радіосигналу через апаратуру ретранслятора з умовним номером j (j=1...m), записана в одиницях вимірювання швидкості; (dD T / dt) - невідоме зміщення шкали частоти користувача відносно опорної шкали часу та частоти суп утникової радіонавігаційної системи, до якої належить даний космічний апарат; (Dt s / dt ) - зміщення шкали частоти космічного апарату з умовним номером s(s=1...n) відносно опорної шкали часу та часто ти супутникової радіонавігаційної системи, до якої належить даний космічний апарат. Це зміщення визначають за цифровою інформацією, яка передається навігаційним радіосигналом даного космічного апарату. Таким чином, якщо визначені координати користувача x, y, z , то за результатами вимірювань (DFдоп,і ) та D Fдоп,s, j з'являється можливість визначити невідомі компоненти допплерівських зсувів частоти ( ) v ,v ,v вектора швидкості користувача x y z та визначити невідомий зсув шкали частоти користувача (dD T / dt) відносно опорної шкали частоти супутникової радіонавігаційної системи, до якої належить даний космічний апарат. Слід завважити, що ці рівняння лінійні, і, у випадку забезпечення виконання умови: n+m=4, можуть бути розв'язані яким-небудь традиційним методом розв’язання лінійних рівнянь [5]. Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних навігаційних систем, що пропонується, може бути реалізований наступним чином. По периметру місцевості, де існують місця екранування навігаційних сигналів космічних апаратів супутникових радіонавігаційних систем, встановлюють ретранслятори навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем. Місцеположення ретрансляторів вибирають таким чином, щоб з одного боку забезпечити мінімальну величину геометричного фактора [1, 2] на даній місцевості, а з іншого боку, щоб забезпечити можливість визначення параметрів руху користувача в кожній точці даної місцевості. Для уникнення інтерференції із радіосигналами космічних апаратів суп утникових радіонавігаційних систем, доцільно виконувати зміщення частоти радіосигналів при проходженні їх через апаратуру ретрансляторів. Так, для супутникової радіонавігаційної системи GPS ( NAVSTAR ). ширина смуги радіосигналу складає приблизно 20МГц, отже достатньо забезпечити перенос частоти радіосигналу від кожного ретранслятора на величину кратну 20МГц відносно частоти основного радіосигналу. Для розділення радіосигналів від різних ретрансляторів, можна за кожним ретранслятором закріпити свою частоту, на яку переноситься спектр радіосигналів космічних апаратів при проходженні їх через апаратур у ретранслятора. Координати приймальних та випромінювальних антен, їх частоти та величини затримки радіосигналів в апаратурі ретранслятора заносять в апаратуру користувача. В апаратурі користувача виконується спільна обробка радіосигналів, прийнятих безпосередньо від космічних апаратів, разом із радіосигналами, прийнятими від ретрансляторів. За результатами цієї обробки виконують визначення параметрів руху користувача. Наведений спосіб може бути реалізований, якщо для забезпечення визначення параметрів руху користувача достатньо використовувати лише один ретранслятор радіосигналів супутникових радіонавігаційних систем. В цьому випадку, в якості ретранслятора може бути використана поверхня, що відбиває радіосигнали, встановлена в точці з відомими координатами таким чином, щоб відбивати в напрямку області знаходження користувача радіосигнали лише тих космічних апаратів, сигнали яких не надходять в цю область. Ще одним варіантом реалізації даного способу визначення параметрів руху користувача є побудова приймальних антен ретрансляторів таким чином, щоб за кожним ретранслятором був закріплений певний сектор неба, тобто, щоб кожен ретранслятор приймав радіосигнали лише від тих космічних апаратів, які перебувають в заданому небесному секторі. Цей варіант реалізації даного способу може бути застосований у випадку, коли користувач знаходиться в області повного екранування радіосигналів всіх космічних апаратів суп утникових радіонавігаційних систем. Приймальна апаратура для виконання визначення параметрів руху користувача згідно із цим способом, може бути побудована на базі вже існуючих навігаційних приймачів шляхом доробки програмне - математичного забезпечення, та блоку аналогового перетворення сигналів з урахуванням необхідності переносу спектра радіосигналів, які випромінюють ретранслятори на частоту основного сигналу. Список літератури. 1. Б. Гофманн-Веленгоф, Г. Ліхтенеггер, Д. Коллінз, "Глобальна система визначення місцеположення (GPS). Теорія і практика", Київ, "На укова думка", 1996р. 2. B.C. Шебшаевич, П.П. Дмитриев, П.П. Иванцевич и др. "Сетевые спутниковые радионавигационные системы", - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993г. 3. Interface Control Document: NAVSTAR GPS Space Segment / Navigation User Interfaces (ICD-GPS-200). Rockwell Int. Corp., 2000. 4. Глобальная навигационная спутниковая система "ГЛОНАСС". Интерфейсный документ (Четвертая редакция), Москва, Координационный научно-информационный центр, 1998г. 5. В.И. Крылов, В.В. Бобков, П.И. Монастырный, "Вычислительные методы", т.1, Изд. "На ука", М.: 1976г.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the object motion parameters by the signals of a satellite radio navigation system
Автори англійськоюVereschak Oleksandr Petrovych, Nesterovych Andrii Hennadiiovych, Piskorzh Volodymyr Viktorovych, Rudych Oleksandr Vasyliovych
Назва патенту російськоюСпособ определения параметров движения объекта по сигналам спутниковой радионавигационной системы
Автори російськоюВерещак Александр Петрович, Нестерович Андрей Геннадьевич, Пискорж Владимир Викторович, Рудич Александр Васильевич
МПК / Мітки
Мітки: визначення, користувача, спосіб, систем, сигналами, радіонавігаційних, параметрів, руху, супутникових
Код посилання
<a href="https://ua.patents.su/7-69794-sposib-viznachennya-parametriv-rukhu-koristuvacha-za-signalami-suputnikovikh-radionavigacijjnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем</a>
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем
Номер патенту: 65085
Опубліковано: 15.03.2004
Автори: Піскорж Володимир Вікторович, Семиволос Сергій Павлович, Усенко Петро Якович, Рудіч Олександр Васильович, Нестерович Андрій Геннадійович, Верещак Олександр Петрович
МПК: G01S 11/00, G01C 23/00
Мітки: спосіб, супутникових, сеансу, радіонавігаційних, вимірювань, навігаційних, імітації, систем
Формула / Реферат:
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем, який включає в себе вибір дати та інтервалу часу всередині даної дати, які визначають часовий інтервал імітації сеансу навігаційних вимірювань апаратури користувача, що контролюється; вибір типів супутникових радіонавігаційних систем, сигнали яких повинні імітуватись; вибір частотного діапазону навігаційних сигналів, що імітуються, космічних апаратів...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Савченко Віталій Анатолійович, Машков Олег Альбертович, Мосов Сергій Петрович, Кравченко Юрій Васильович
МПК: G01S 5/02
Мітки: рухомого, визначення, система, об'єкта, швидкості, координат
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Скрипник Юрій Олексійович, Дубровний Віктор Опанасович, Шевченко Костянтин Леонідович
МПК: G05B 23/00
Мітки: датчиків, автоматичного, похибок, пристрій, параметрів, технологічних, визначення, систем, здійснення, спосіб, регулювання, процесів
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів
Номер патенту: 65099
Опубліковано: 15.03.2004
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: метод, вимірювання, руху, частотно-часовий, модернізований, літальних, апаратів, параметрів
Формула / Реферат:
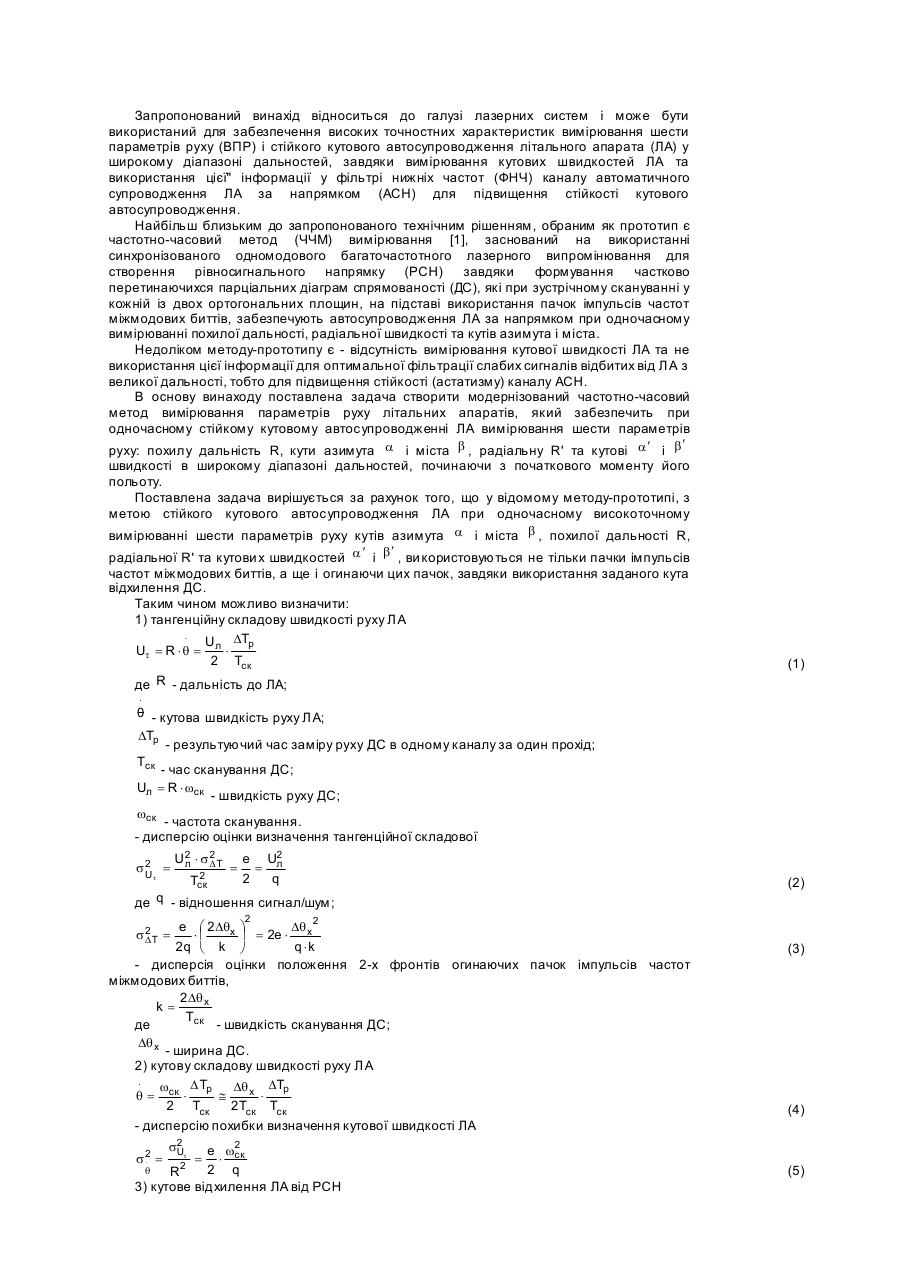
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який полягає у тому, що на передавальному боці шестипараметрійної лазерної вимірювальної системи (ЛВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяють необхідні пари частот для створення рівносигнального напрямку (РСН) у вигляді 4-х, які частково перетинаються, парціальних...
Комплект для вхідних з’єднувальних ліній до аналогових станцій координатної системи від систем комутації з неоднотипними сигналами
Номер патенту: 31155
Опубліковано: 15.12.2000
Автори: Єрмаков Олег Олександрович, Піскер Михайло Наумович
Мітки: координатної, з'єднувальних, комплект, системі, систем, станцій, вхідних, ліній, аналогових, комутації, неоднотипними, сигналами
Формула / Реферат:
Комплект для вхідних з'єднувальних ліній до аналогових станцій координатної системи від систем комутації з неоднотипними сигналами, який містить блок узгодження з вхідною з'єднувальною лінією та блок узгодження з входом ступеня групового пошуку, який відрізняється тим, що до комплекту додатково введений блок керування, з'єднаний з блоком узгодження вхідної з'єднувальної лінії, та блоком взаємодії з входом ступеня групового пошуку, а також...
Попередній патент: Спосіб сухого магнітного збагачення руд та матеріалів
Наступний патент: Спосіб термічної обробки відливків
Випадковий патент: Інгібітор корозії чорних металів у малокислих середовищах