Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Деденок Віктор Петрович, Голкіна Валентина Василівна, Бутенко Ольга Станіславівна, Голкін Дмитро Васильович

Текст
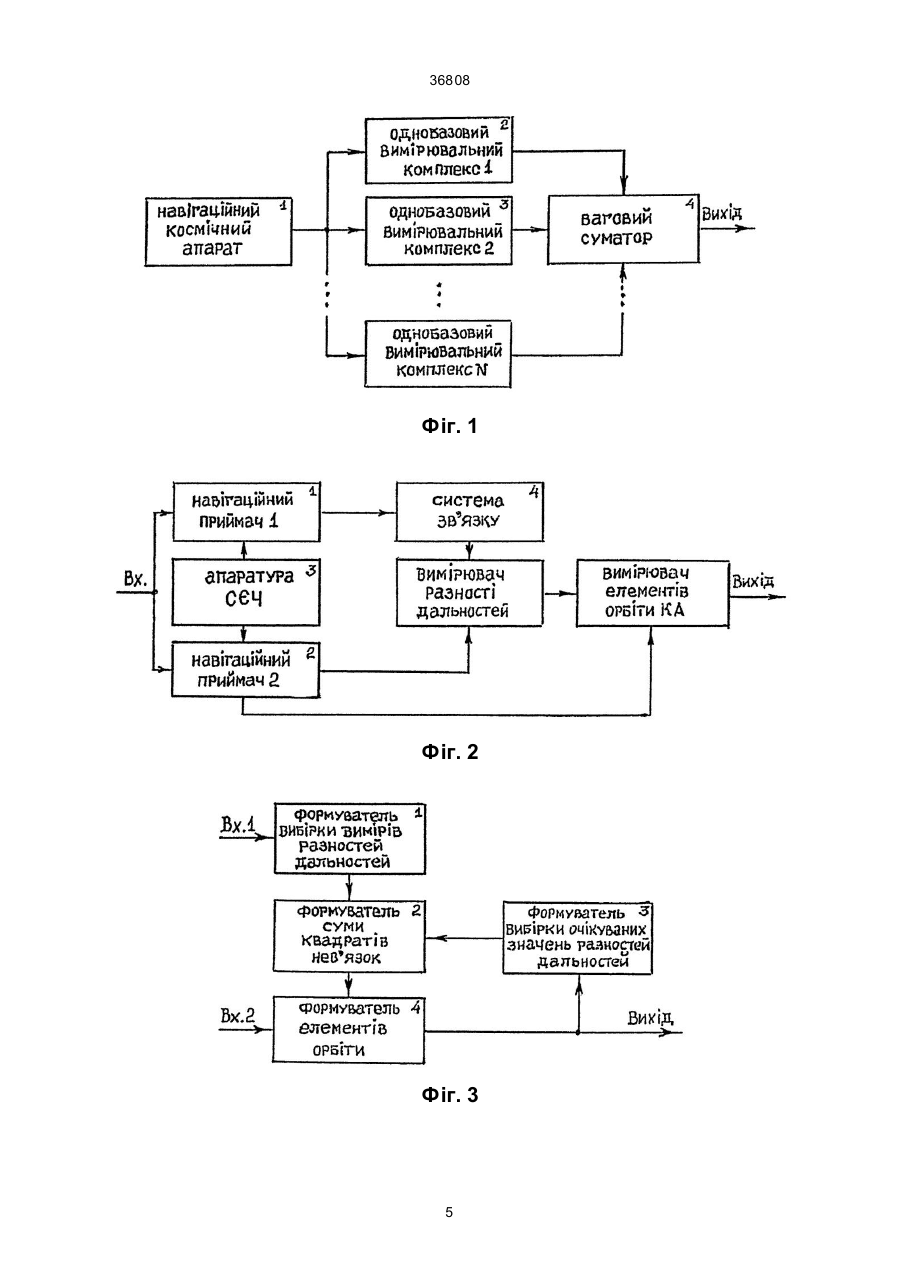
Спосіб визначення орбіт навігаційних космічних апаратів, який полягає в тому, що сигнали навігаційних космічних апаратів приймають по відкритих каналах зв'язку мережею наземних навігаційних приймачів з відомими координатами, у кожному з яких вимірюють псевдодальність до кож ного навігаційного космічного апарата і запам'ятовують час виміру, який відрізняється тим, що навігаційні приймачі розташовують на заданий території в контрольних пунктах прийому з максимальним розносом, контрольні пункти прийому об'єднують попарно в автономні однобазові вимірювальні комплекси у кожному однобазовому вимірю 36808 вибірками вимірів обчислюють координати навігаційного приймача. Після цього порівнюють обмірювані координати приймача із заздалегідь відомими координатами й обчислюють диференціальні поправки навігаційних визначень. Диференціальні поправки за допомогою передавача передають споживачам, що знаходяться в районі контрольного пункту прийому, для корекції загальної систематичної похибки космічної навігаційної системи [3]. До недоліків цього способу належать низька точність визначення орбіт КА, низька точність навігаційних визначень для споживачів, що знаходяться на значному віддаленій від контрольного пункту прийому (понад 50-100 км), висока щільність розташування контрольних пунктів прийому. В основу винаходу поставлена задача створити спосіб визначення орбіт навігаційних космічних апаратів, який шляхом введення однобазових вимірювальних комплексів і автономного високоточного виміру псевдодальності до кожного космічного апарату з декількох пунктів прийому дозволив би, не маючи спеціальної бортової і наземної апаратури як єдиного вимірювального комплексу, забезпечити підвищення точності визначення орбіт космічних апаратів при зменшеному числі контрольних пунктів прийому, а також підвищити точність навігаційних визначень незалежно від відстані між споживачем і контрольним пунктом прийому. Для вирішення поставленої задачі в способі визначення орбіт навігаційних космічних апаратів, який полягає в тому, що навігаційні приймачі встановлюють у контрольних пунктах прийому з відомими координатами, вимірюють псевдодальності до кожного космічного апарата, що спостерігається, і запам'ятовують час вимірів, додатково шляхом введення однобазових вимірювальних комплексів проводять виміри різниці дальностей від кожного космічного апарата до кожної пари приймальних пунктів. Контрольні пункти прийому розміщують на заданій території з максимальним розносом. Мінімальне число приймальних пунктів скорочують до двох. Шля хом уведення спеціальних формувачів утворюють сигнальну вибірку вимірів різниці дальностей і сигнальну вибірку очікуваних значень різниці дальностей, що порівнюють між собою і формують суму квадратів неув'язок. Ітераційним способом у додатковому вимірювачі елементів орбіти варіюють очікувані значення елементів орбіт КА доти, доки не буде отриманий мінімум суми квадратів неув’язок. Отримані таким способом значення елементів орбіт КА приймають за обмірювані для даної пари пунктів прийому. Обмірювані значення елементів орбіт виважено сумують у спеціальному суматорі по числу пар приймальних пунктів з урахуванням точнісних характеристик вимірів. На фіг. 1 наведена структурна схема пристрою, що реалізує спосіб визначення орбіт навігаційних космічних апаратів; на фіг. 2 - стр уктурна схема однобазового вимірювального комплексу і на фіг. 3 - структурна схема вимірювача елементів орбіти КА. Суть запропонованого способу полягає в такому. Навігаційні приймачі встановлюють у контрольних пунктах прийому з відомими координатами. Число пунктів прийому порівняно з прото типом скорочують. Мінімальне число пунктів прийому дорівнює двом. Пункти прийому розміщують на заданій території з максимальним розносом. Всі пункти прийому розділяють на окремі пари, що утворять незалежні однобазові вимірювальні комплекси. У кожному пункті прийому вимірюють псевдодальність до того самого космічного апарата і запам'ятовують час виміру. Додатково в кожному однобазовому вимірювальному комплексі вимірюють різність дальностей до цього ж космічного апарату. У процесі вимірювання різності дальностей компенсується систематична помилка у вимірі дальності до космічного апарата, що зумисне внесена власниками навігаційної системи. Так, якщо обмірюване значення дальності Rизм і від КА до і-го пункту прийому (псевдодальність) дорівнює Rизм і=Rист і+DR а до j-го пункту прийому Rизм j=Rист j+DR де Rист - дійсна дальність до КА; DR - навмисна систематична помилка, то різність дальностей DRизм іj=Rизм і-Rизм j=Rист і-Rист j систематичної помилки не містить. Внаслідок цього створюються умови для точного визначення орбіт навігаційних КА. Для подальшого розгляду вибірку незалежних вимірів різності дальностей в одному однобазовому вимірювальному комплексі подають у вигляді вектора-стовпчика (1) DR(T)=R1(Р, l1 , j 1, Т)-R2(P, l2 , j 2, T) де R1(Р, l1, j 1, Т), R2(P, l2, j 2, T) дальності від КА до першого і другого вимірювального пункту відповідно; Т - вектор моментів вимірів різності дальностей; Р - вектор елементів орбіти КА. Врахуємо, що в космічних навігаційних системах одержують хороші початкові умови для визначення орбіт навігаційних космічних апаратів. Для цього використовують дані альманаху системи, що утримуються в навігаційних повідомленнях. За відомими початковими умовами відомим способом [4] формують очікувані значення дальностей від КА до кожного пункту прийому, а потім - очікувані значення вектора-стовпчика різності дальностей DRож(Т). Суть подальших операцій полягає в такому. Вимірюють значення неув'язок між обмірюваними й очікуваними значеннями різності дальностей. У результаті вимірів формують вектор-стовпчик неув'язок D=DRизм (Т)-D Rож(Т) а потім суму квадратів неув'язок S=Dg×D Після цього відомим ітераційним способом знаходять такі значення очікуваних елементів орбіти КА, при яких забезпечується мінімум суми квадратів неув'язок. Знайдені значення елементів орбіти КА приймають за обмірювані. Для одержання остаточної оцінки елементів орбіти роблять зважене підсумовування результатів вимірів з урахуванням точнісних характеристик окремих однобазових вимірювальних комплексів. Оцінимо точність визначення елементів орбіти навігаційних КА спочатку в одному однобазовому різностно-далекомірному комплексі. Для вирі 2 36808 j1=0,87 рад. l1=0,63 рад. j2=0,78 рад. l2=0,58 pад. j3=0,84 рад. l3=0,396 рад. j4=0,85 рад. l4=0,47 рад. і з цих пунктів прийому утворюють шість однобазових вимірювальних комплексів. Розрахунки роблять стосовно до космічної навігаційної системи "ГЛОНАСС", у якій використовують навігаційні КД з такими значеннями елементів орбіти [6]: висота орбіти Н=19100 км; драконічний період обертань Тдр=11 год. 15 хв. 44 сек.; нахилення орбіти і=64,8 град.; ексцентриситет орбіти е=0. Точність виміру псевдодальностей приймають рівною 30 м на інтервалі 103 сек. Відповідно, середньоквадратичне значення помилки виміру різності дальностей приймають рівною 60 м. Час спостереження одного КА в одніму сеансі зв'язку приймають рівним 13500 сек. Для прийнятих вихідних даних у результаті розрахунків на ПЕОМ були отримані такі значення лінійних помилок визначення місця розташування навігаційного КА на орбіті в абсолютній геоцентричній системі координат на момент проходження екватора 0,1576 - 0,1140 0,2152 К = - 0,1140 0,4070 0,0764 0,2152 0,0764 0,7480 шення поставленої задачі введемо ряд обмежень, прийнятих звичайно при визначенні орбіт КА [5]. Одним із них є наявність достатньо точних початкових умов або апріорних зведень про значення елементів орбіти КА. Крім того, будемо вважати, що для визначення орбіт використовують результати вимірів різності дальностей, отриманих тільки в одному сеансі зв'язку з КА. При дотриманні зазначених умов поблизу початкових значень різності дальностей DR0(T) i елементів орбіти Р0 розкладають ліву і праву частини (1) у лінійні ряди, а потім відносно кореляційних матриць помилок вимірів отримують таке вираження: (2) Kr=A×Kp×AT де Kr - кореляційна матриця (МхМ) помилок вимірів різності дальностей в однобазовому вимірювальному комплексі; А - матриця (MXP) приватних похідних від правої частини (1) за елементами орбіти КА; AT - транспонована матриця А; Кр - шукана матриця (РхP) помилок визначення елементів орбіти КА; М - число незалежних вимірів різності дальностей (розмірність вибірки R(T)). У результаті, одержують аналітичне вираження для обчислення шуканої матриці Кр. Для цього ліву і праву частини рівняння (2) зліва множать на матрицю AT, а справа - на матрицю А. Отримують: (3) AT×Kr×А=(AT×А)×К р×(AT×А) Зауважимо, що нова матриця (АТ×А) є квадратною, розмірністю (РхР). Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1 Точність визначення орбіти навігаційного КА в угр упованні з N однобазових вимірювальних комплексів знаходять як Кр-1=SКрі-1 -1 Кр - матриця, обернена кореляційній матриці помилок вимірів елементів орбіти в угрупованні з N однобазових вимірювальних комплексів; Крі-1 - матриця, обернена кореляційній матриці помилок вимірів елементів орбіти в і-му однобазовому ви мірювальному комплексі. За відомою кореляційною матрицею помилок вимірів елементів орбіти КА обчислюють значення кореляційної матриці лінійних помилок визначення місця розташування навігаційного КА на орбіті К=Вr×Кp×В де В - матриця приватних прохідних від поточних проекцій КА на вісі обраної прямокутної системи координат по елементах орбіти. Для одержання кількісних оцінок вважають, що контрольні пункти прийому розміщують на земній поверхні в точках з географічними координатами Рядки і стовпчики матриці К відповідають координатам КА в прямокутній геоцентричній системі координат у такій послідовності (X, Y Z). Результати розрахунків подані у розмірності - м 2. Такі точності відповідають вимогам до визначення місця розташування навігаційних КА на орбіті для забезпечення точності навігаційних визначень не гірше 10 м [7]. Таким чином, проведені розрахунки показують, що точність визначення орбіт навігаційних КА при використанні запропонованого способу може бути підвищена до рівня, що забезпечує розмір лінійних помилок визначення місця розташування навігаційного КА на орбіті порядку їм без наявності спеціальної бортової і наземної апаратури як єдиного вимірювального комплексу. Відповідно, точність навігаційних визначень може бути підвищена більш ніж на порядок незалежно від віддалення споживача від контрольного пункту прийому. Запропонований спосіб може бути реалізований, наприклад, за допомогою пристрою, структурна схема якого та його складових елементів наведена на фіг. 1, фіг. 2 і фі г. 3. Пристрій містить (фіг. 1) N однобазових вимірювальних комплексів 2, 3,.... На вхід кожного однобазового вимірювального комплексу надходять сигнали з того самого навігаційного КА 1. Виходи всіх однобазових вимірювальних комплексів сполучені з N входами вагового суматора 4, вихід якого є ви ходом всього пристрою. Кожний однобазовий вимірювальний комплекс (фіг. 2) містить два однакових навігаційних приймачі 1 і 2, на входи яких надходять сигнали з того самого навігаційного КА. Др угі входи навігаційних приймачів сполучені з апаратурою служби єдиного часу (СЄЧ). Вихід навігаційного приймача 1, що 3 36808 приєднаний через систему зв'язку 4 до вимірювача різності дальностей 5. Другий вхід вимірювача різностей дальностей приєднаний до виходу навігаційного приймача 2. Вихід вимірювача різностей дальностей приєднаний до першого входу вимірювача елементів орбіти КА 6. Другий вхід вимірювача елементів орбіти КА 6 приєднаний до другого виходу навігаційного приймача 2. Вихід вимірювача елементів орбіти КА приєднаний до одного з входів вагового суматора (фіг. 1). Вимірювач елементів орбіти КА. (фіг. 3) містить формувач вибірки вимірів різностей дальностей 1, вихід якого приєднаний до формувача суми квадратів неув'язок 2. Другий вхід формувача суми квадратів неув'язок 2 приєднаний до формувача очікуваних різностей дальностей 3, вхід якого приєднаний до виходу формувача елементів орбіти 4, другий вхід якого приєднаний до виходу навігаційного приймача 2 (фіг. 2). Вихід формувача елементів орбіти 4 є виходом вимірювача елементів орбіти КА. Робота пристрою полягає в такому. Сигнали з борта одного з навігаційних КА приймають всі однобазові вимірювальні комплекси (фіг. 1), у кожному з яких здійснюють незалежний вимір елементів орбіти цього КА. Результати незалежних вимірів виважено сумують у ваговому суматорі. У кожному однобазовому вимірювальному комплексі (фіг. 2) сигнали з борта того самого КА приймають двома просторово рознесеними штатними навігаційними приймачами, які розміщені в контрольних пунктах прийому із заздалегідь відомими координатами. У кожному навігаційному приймачі, відповідно до його штатних функцій, здійснюють вимір псевдодальності до КА. Запам'я товують час виміру. Для цього на другі входи навігаційних приймачів подають мітки часу від штатної апаратури СЄЧ. Результати виміру псевдодальності з виходу приймача 1 подають крізь штатну систему зв'язку на вимірювач різності дальностей, на другий вхід якого подають результати виміру псевдодальності з виходу навігаційного приймача 2. У вимірювачі різності дальностей обчислюють різність дальностей від КА до дво х пунктів прийому. Результати виміру різностей дальностей подають на перший вхід вимірювача елементів орбіти КА, на другий вхід якого подають дані про елементи орбіти КА, що утримуються в альманасі системи, прийнятому навігаційним приймачем 2. У вимірювачі елементів орбіти КА (фіг. 3) по обмірюваних різностях дальностей формують вибірку обмірюваних значень різностей дальностей, що подають на формувач суми квадратів неув'язок. На другий вхід формувача суми квадратів неув'язок подають вибірку очікуваних значень різностей дальностей, сформованих у спеціальному формувача. На вхід формувача очікуваних значені, різностей дальностей подають значення елементів орбіти КА, сформованих у фор мувачі елементів орбіти. Формування елементів орбіти здійснюють відомим ітераційним способом [2] шляхом варіювання значень елементів орбіти, що надходять з виходу навігаційного приймача 2 (фат. 2). Ітераційну процедуру закінчують, коли забезпечу ється мінімум сума квадратів неув'язок. Отримані таким способом значення елементів орбіти КА приймають за обмірювані в даному однобазовому вимірювальному комплексі. Після виміру елементів орбіти одного КА здійснюють чергові виміри елементів орбіти інших КА. Пристрій містить відомі, випробувані на практиці, елементи, випуск яких освоєний підприємствами промисловості і науковими закладами України. Зокрема, виробництво навігаційних приймачів освоєно підприємством "Свема" (м. Суми) і Науково-дослідним інститутом радіотехнічних ви мірів (м. Харків). У якості засобів зав'язку й апаратури СЄЧ може бути використана штатна апаратура системи передачі даних і системи єдиного часу відповідно. Вимірювач різності дальностей і ваговий суматор можуть бути виго товлені практично на будьякому підприємстві електронного профілю. Вимірювач елементів орбіти КА є штатним елементом апаратури центру керування польотами ЦКП-Є (м. Євпаторія). Цей же вимірювач реалізований на ПЕОМ Головного балістичного центру ДКБ "Південне" (м Дніпропетровськ) і на ПЕОМ Військового наукового центру космічних досліджень при Харківському військовому університеті (м. Харків). Запропонований спосіб порівняно з прототипом має такі технічні переваги: підвищується точність визначення орбіт навігаційних КА без наявності спеціальної бортової і наземної апаратури як єдиного вимірювального комплексу; підвищується точність навігаційних визначень незалежно від розташування споживача від контрольного пункту прийому; знижується кількість контрольних пунктів прийому. Джерела інформації. 1. Мережні супутникові радіонавігаційні системи. Шебшевич B.C., Дмитрієв П.П., Иванцевич Н.В. і ін. / Під ред. П.П. Дмитрієва і B.C. Шебшевича. - М: Радіо і зв'язок, 1982. - С. 109-111. 2. Мережні супутникові радіонавігаційні системи. Шебшевич B.C., Дмитрієв П.П., Иванцевич Н.В.і ін. / Під ред. П.П. Дмитрієва і B.C. Шебшевича. - М: Радіо і зв'язок, 1982. - С. 124-128. 3. Шкирятов В. В.. Радіонавігаційні системи й пристрої. - М: Радіо і зв'язок, 1984. - С. 127-132 (прототип). 4. Аппазов Р.Ф., Ситін О.Г. Ме тоди проектування траєкторій носіїв і супутників Землі. - М.: Наука, 1987. - С. 191-195. 5. Мережні супутникові радіонавігаційні системи. Шебшевич B.C., Дмитрієв П.П., Иванцевич Н.В. і ін. / Під ред. П.П. Дмитрієва і B.C. Шебшевича. - М: Радіо і зв'язок, 1982. - С. 35-44. 6. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольний документ. - М: Военно-космические силы России, 1995. - С. 49-50. 7. Шкирятов В. В.. Радіонавігаційні системи й пристрої. - М: Радіо і зв'язок, 1984. - С. 124-125. 4 36808 Фіг. 1 Фіг. 2 Фіг. 3 5 36808 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of orbits of navigation spacecrafts
Автори англійськоюHolkin Dmytro Vasyliovych, Dedenok Viktor Petrovych, Holkina Valentyna Vasylivna, Butenko Olha Stanislavivna
Назва патенту російськоюСпособ определения орбит навигационных космических аппаратов
Автори російськоюГолкин Дмитрий Васильевич, Деденок Виктор Петрович, Голкина Валентина Васильевна, Бутенко Ольга Станиславовна
МПК / Мітки
МПК: G01S 5/00
Мітки: визначення, спосіб, апаратів, орбіт, космічних, навігаційних
Код посилання
<a href="https://ua.patents.su/6-36808-sposib-viznachennya-orbit-navigacijjnikh-kosmichnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орбіт навігаційних космічних апаратів</a>
Спосіб та пристрій повністю апаратної обробки радіосигналів навігаційних супутників gps і глонасс
Номер патенту: 31662
Опубліковано: 15.12.2000
Автори: Борсук Олег Анатолійович, Дубінко Юрій Сергійович, Лук'яненко Микола Васильович, Кириченко Олександр Іванович
Мітки: глонасс, обробки, супутників, навігаційних, пристрій, повністю, радіосигналів, спосіб, апаратної
Текст:
...структурна схема цифрової замкнутої з дискретниі управлінням фазою системи стеження за затримкою коду ( ССЗ ) запропонованог АЦСПРС з апаратною підтримкою відстеженої ССН доплеровською частотою, де 22 блок коригування фази коду , 23 - схема "арбітр ", 24 - перший накопичуючий сумато) 25 - блок управління, 26 - ПЗГЦпостійний запом'ятовуючий пристрій),. 27 - другі' накопичуючий суматор, 28 - перший діль ник, 29 - дискримінатор затримки,...
Спосіб обробки радіосигналів навігаційних супутників gps і глонасс та пристрій для його здійснення
Номер патенту: 33744
Опубліковано: 15.02.2001
Автори: Батіщев Сергій Миколайович, Кириченко Олександр Іванович, Борсук Олег Анатолійович, Дубінко Юрій Сергійович
МПК: H04B 1/06
Мітки: здійснення, спосіб, супутників, глонасс, пристрій, навігаційних, радіосигналів, обробки
Текст:
...широкосмугової фільтрації, широкосмугового підсилення, перетворення частоти з використанням гетеродинної частоти, яку одержують від синтезатора гетеродинної частоти, широкосмугового підсилення проміжної частоти, аналогоцифрового перетворення сигналів із виходу відеопідсилювача з обмеженою смугою пропускання і цифрової обробки сигналів, відрізняє ться тим, що операцію перетворення частоти сигналу виконують з використанням гетеродинної...
Спосіб локації космічних об’єктів
Номер патенту: 32185
Опубліковано: 15.12.2000
Автор: Даник Юрій Григорович
МПК: G01S 3/78
Мітки: космічних, спосіб, локації, об'єктів
Текст:
...шумові зображення, які є одиночними (не мають на задашй відстані відповідного ім другого зображення), або не співпадають у парах за орієнтацією у просторі, розмірами і інтенсивністю. Рішення, що пропонується, дозволяє вирішити задачу зниження імовірностей помилкового виявлення об'єктів та їх невиявлення, шляхом зменшення впливу внутрішніх шумів приймача випромінювання за рахунок надання зображенням об'єктів, які спостерігаються таких...
Спосіб локації космічних об’єктів
Номер патенту: 31410
Опубліковано: 15.12.2000
Автори: Карпенко Владислав Володимирович, Бабенко Володимир Володимирович, Семеншин Олександр Людвигович
МПК: G01S 3/78
Мітки: локації, спосіб, об'єктів, космічних
Формула / Реферат:
Спосіб локації космічних об'єктів, який полягає у тому , що одержують зображення ділянки зоряного неба, у межах поля зору селектують космічний об'єкт на фоні зірок, визначають відхилення зображення космічного об’єкта від еталонної точки в полі зору, який відрізняється тим, що координату зображення еталонної точки знаходять як різницю між координатою, виміряною у площині зображення ділянки зоряного неба і екстрапольованою координатою...
Спосіб локації космічних об’єктів
Номер патенту: 29010
Опубліковано: 16.10.2000
Автори: Карпенко Володимир Іванович, Даник Юрій Григорович, Бабенко Володимир Володимирович, Семеншин Олександр Людвигович
МПК: G01S 3/78
Мітки: локації, об'єктів, космічних, спосіб
Формула / Реферат:
Споcіб локації космічних об'єктів, що полягає у тому, що одержують зображення ділянки зоряного неба, у межах поля зору селектують космічний об'єкт на фоні зірок, визначають відхилення зображення космічного об'єкта від еталонної точки в полі зору, який відрізняється тим, що визначають найкоротший шлях від зображення еталонної точки до зображення найближчої не еталонної точки, що знаходиться з нею у одній зоні ізопланатизму у напрямку на...
Попередній патент: Спосіб лікування виразки дванадцятипалої кишки, асоційованої із хелікобактерною інфекцією
Наступний патент: Пристрій для стиснення цифрових телевізійних сигналів кольорового зображення
Випадковий патент: Спосіб множинної активації іонів та атомів через ядерний магнітний та електронний парамагнітний резонанси та пристрій для його здійснення