Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 61346
Опубліковано: 15.05.2006

Формула / Реферат
Корисна модель стосується технології змішування (гомогенізації) сипких матеріалів і може знайти застосування у фармацевтичній промисловості, зокрема при виготовленні твердих лікарських форм і препаратів, а також у харчовій, хімічній, металургійній і інших промисловостях.
Відомий і найбільш близький спосіб змішування сипких матеріалів у обертових апаратах [1], який включає завантаження сипких компонентів у робочу камеру, що обертається відносно горизонтальної осі зі сталою частотою, яку визначають експериментально.
Недолік цього способу є те, що частоту обертання апарата (змішувача), при якій забезпечуються оптимальні умови змішування, не залежно від типу апарату, його розмірів і фізико-механічних властивостей змішуваних матеріалів, визначають експериментально. Такий спосіб не дає можливість оптимізувати процес змішування сипких матеріалів без проведення експериментальних досліджень, здійснювати масштабний перехід від дослідних до промислових апаратів, а також здійснювати вибір конструкції апарату для запобігання сегрегації (розшарування компонентів) [2] при змішуванні компонентів, що різняться між собою за фізико-механічними властивостями.
В основу корисної моделі поставлено задачу вдосконалити існуючий спосіб змішування сипких матеріалів у обертових апаратах шляхом обертання апарата з частотою, при якій здійснюється активне змішування компонентів і разом з тим мінімізується додаткове подрібнення і стирання частинок компонентів, уникнути явище сегрегації при змішуванні компонентів, що різняться за фізико-механічними властивостями, а також здійснювати масштабний перехід від дослідних до промислових апаратів аналогічного типу без додаткового експериментального визначення оптимальних параметрів процесу змішування у промислових апаратах.
Вирішення поставленої технічної задачі досягається тим, що у способі змішування сипких матеріалів у обертових апаратах та масштабування, який включає завантаження сипких компонентів у робочу камеру апарата, що обертається відносно горизонтальної осі зі сталою частотою обертання, визначення оптимальної частоти обертання апарату, визначення кратності змішування сипкого матеріалу за один оберт циліндричного апарату, визначення радіуса центра ваги засипки матеріалу у циліндричному апараті, тривалості процесу змішування і маси матеріалу в промисловому апараті при переході від дослідних змішувачів до промислових аналогічного типу, згідно корисної моделі, частоту обертання апарату підтримують такою, яка забезпечує відрив частинок сипкого матеріалу від стінки апарату на верхньому рівні поверхні засипки, що займає положення під кутом природного схилу сипкої суміші, і надає частинкам рух вниз по поверхні засипки без вільного падіння. Така частота обертання забезпечує активне змішування компонентів і не призводить до додаткового подрібнення і стирання частинок, що у переважній більшості вважають важливою вимогою при змішуванні сипких матеріалів.
Таку частоту обертання розраховують за рівнянням:
![]()
(1)
де n - оптимальна частота обертання апарата, об/хв.;
![]() - кут природного схилу сипкого матеріалу, град.;
- кут природного схилу сипкого матеріалу, град.;
R - радіус апарата (для асиметричних відносно осі обертання апаратів це є віддаль від осі обертання до найвіддаленішої точки робочої камери апарата), м.
Кратність змішування ![]() , тобто середню кількість циклічних переміщень частинок за один оберт апарату, змінюють ступенем наповнення апарату у переважно в діапазоні від 0,25 до 0,5 об'єму апарату і розраховують за рівнянням:
, тобто середню кількість циклічних переміщень частинок за один оберт апарату, змінюють ступенем наповнення апарату у переважно в діапазоні від 0,25 до 0,5 об'єму апарату і розраховують за рівнянням:
![]()
(2)
Для визначення затрат енергії на змішування у симетричному відносно осі обертання апараті, наприклад циліндричному, радіус центра ваги продукту в апараті R0 визначають за формулою:
![]() .
.
Масштабування технологічних параметрів змішування сипких матеріалів при переході від дослідних до промислових змішувачів, що включає визначення оптимальної частоти обертання апарату, тривалість процесу зміщування, масу матеріалу при заданому ступені засипки (наповнення) промислового апарату аналогічного типу, здійснюють виходячи з умови рівності питомих затрат енергії на змішування у дослідному і промисловому апаратах.
При змішуванні у дослідному і промисловому апаратах сипких матеріалів, що мають однаковий кут природного схилу, оптимальну частоту обертання промислового апарату визначають за співвідношенням:
![]()
(3)
При змішуванні у дослідному і промисловому апаратах сипких матеріалів, які мають різний кут природного схилу, оптимальну частоту обертання промислового апарату визначають за співвідношенням:
![]()
(4)
При змішуванні аналогічних сипких матеріалів у дослідному і промисловому апаратах і при однаковому ступені наповнення цих апаратів тривалість процесу змішування у промисловому апараті визначають за співвідношенням:
![]()
(5)
При змішуванні сипких матеріалів, що різняться між собою кутом природного схилу, і при однаковому ступені наповнення апаратів тривалість змішування у промисловому апараті визначають за співвідношенням:
![]()
(6)
При змішуванні сипких матеріалів, що різняться між собою кутом природного схилу і при різному ступені наповнення дослідного і промислового апаратів, тривалість змішування у промисловому апараті визначають за співвідношенням:
![]()
(7)
k = R0 / R - відношення радіуса центра ваги продукту в апараті R0 до радіуса апарату R,
k1 = R01 / R1; k2=R02 / R2; R01=![]()
![]()
![]()
(8)
При змішуванні однакових за насипною густиною сипких матеріалів у геометрично подібних дослідному і промисловому апаратах і однаковому ступені наповнення цих апаратів, масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
![]()
(9)
однак, якщо співвідношення однойменних параметрів апаратів не є величина постійна, наприклад, відношення радіусів дослідного і промислового апаратів не дорівнює відношенню довжин робочих зон цих апаратів, тобто ![]() то масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
то масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
![]()
(10)
де V1; V2 - об'єми робочих камер відповідно дослідного і промислового апаратів, м3.
При змішуванні однакових за насипною густиною сипких матеріалів у геометричнo подібних дослідному і промисловому апаратах і різному ступені наповнення цих апаратів, масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
![]()
(11)
якщо ![]() то масу матеріалу, який засипають у промисловий апарат, визначають за cпіввідношенням:
то масу матеріалу, який засипають у промисловий апарат, визначають за cпіввідношенням:
![]()
(12)
При змішуванні різних за насипною густиною сипких матеріалів у геометричнo подібних дослідному і промисловому апаратах і різному ступені наповнення цих апаратів, масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
![]()
(13)
якщо ![]() то масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
то масу матеріалу, який засипають у промисловий апарат, визначають за співвідношенням:
![]()
(14)
При змішуванні полі компонентних сипких матеріалів, схильних до сегрегації (розшарування компонентів), в обертовому апараті забезпечують замкнутий цикл циркуляції частинок у радіальній і осьовій площинах за кожен оберт апарату. Для цього використовують асиметричні відносно осі обертання апарати типу "п'яна бочка" , V-подібний, спарені конуси і інші.
Приклад здійснення способу змішування сипких матеріалів, відмінних за фізико-механічними властивостями, у обертових дослідному і промисловому апаратах.
В дослідний апарат барабанного типу симетричний відносно осі обертання засипають m1=2кг сипких компонентів:
хлорид натрію (сіль) у кількості ec=0,04 (4%); mc=m1×0,04=2×0,04=0,08кг;
двоокис кремнію (пісок) у кількості en=0,96 (96%); mn= m1×0,96=2×0,96=1,92кг;
насипна густина солі rc»940кг/м3,
насипна густина піску rn»1500кг/м3,
кут природного схилу солі jc=38°,
кут природного схилу піску jn=33°.
Розміри дослідного апарату:
діаметр робочої камери ----------d1=260мм=0,26м; (R1)=0,13м),
довжина робочої камери --------- L1=60мм=0,06м.
1. Об'єм робочої камери апарату:
![]()
2. Ступінь наповнення апарату:
3. Оптимальну частоту обертання апарату розраховуємо при значеннях кута природного схилу:
піску![]() ,
,
солі ![]()
З метою більш інтенсивного процесу змішування приймаємо верхню межу оптимальної частоти обертання
n1 » 65об/хв.
Ступінь однорідності суміші визначаємо методом відмивання розчинного компоненту (солі) через кожну хвилину роботи змішувача.
Однорідність суміші (із ступенем однорідності 98%) встановилася після 4 хвилин роботи апарату. Отже оптимальна тривалість процесу змішування у дослідному апараті становить
t1 = 4хв.
За цей час частинки матеріалу здійснили в середньому N1 циклічних переміщень у робочій зоні апарату (кратність змішування l1 і l2 розраховуємо за рівнянням (2)):
![]()
Одержані результати параметрів змішування у дослідному апараті використовуємо для розрахунку параметрів змішування сипких компонентів у подібному циліндричному промисловому апараті таких розмірів:
діаметр робочої камери d2=0,6м, (R2=0,3м),
довжина робочої камери L2=0,55м.
Сипкий матеріал:
гранульована цукрова пудра eц=0,04 (4%);
густина насипна цукру rц»810кг/м3,
кут природного схилу цукру jц=36°,
двоокис кремнію (пісок) en=0,96 (96%).
Ступінь наповнення промислового апарату приймаємо ![]()
1. Об'єм робочої камери промислового апарату:
![]()
2. Оптимальну частоту обертання апарату розраховуємо за рівнянням (1), виходячи з граничних значень кута природного схилу компонентів:
для піску ![]()
для цукру ![]()
Для оптимальної роботи апарату встановлюємо верхню межу частоти обертання, тобто
n2 » 42об/хв.
3. Масу матеріалу, який потрібно засипати у промисловий апарат, розраховуємо за співвідношенням (14):
![]()
де r1см і r2см - насипна густина суміші відповідно у дослідному і промисловому апаратах.
r1см = rn ×en + rc ×ec = 1500 × 0,96 + 940 × 0,04 = 1477,6кг/м3;
r2см = rn ×en + rц ×eц = 1500 × 0,96 + 810 × 0,04 = 1472,4кг/м3.
Тривалість процесу змішування t2 у промисловому апараті розраховуємо згідно формули (7), яка враховує різницю ступеня наповнення y і різницю кутів j природного схилу компонентів у дослідному і промисловому апаратах:
а) для випадку коли розрахунок тривалості процесу здійснюємо по базовому компоненту (компоненту, кількість якого переважає у суміші, у нашому випадку у дослідному і промисловому апаратах це пісок),
тоді j2 = j1 і тривалість процесу змішування:
![]()
б) для випадку коли розрахунок тривалості процесу здійснюємо по компоненту, кількість якого не переважає у суміші, але ці компоненти різні у дослідному і промисловому апаратах і кут j природного схилу у цих компонентів теж різний, у нашому випадку це хлорид натрію - у дослідному апараті і цукор - у промисловому апараті), тоді тривалість процесу змішування:
![]()
де ![]()
![]()
j1=38°
j2=36°;
Отже оптимальна тривалість процесу змішування у промисловому апараті становить не менше десяти хвилин:
t2 ³ 10хв.
За цей час частинки матеріалу здійснять N2 циклічних переміщень у робочій камері апарату:
![]()
Однорідність одержаної суміші становила не менше 98%.
Здійснення заявленого способу дозволяє оптимізувати роботу обертових змішувачів, проводити масштабування параметрів процесу змішування при переході від дослідних до промислових апаратів.
Джерела інформації:
1. Макаров Ю.И. Аппараты для смешения сыпучих материалов, М: Машиностроение, 1973.С.216.
2. Вивчення розподілу компонентів у змішувачах. Модестов В.Б., Куліков Д.О., Хімічна промисловість України, 2003, №3.-С.29-31.
Текст
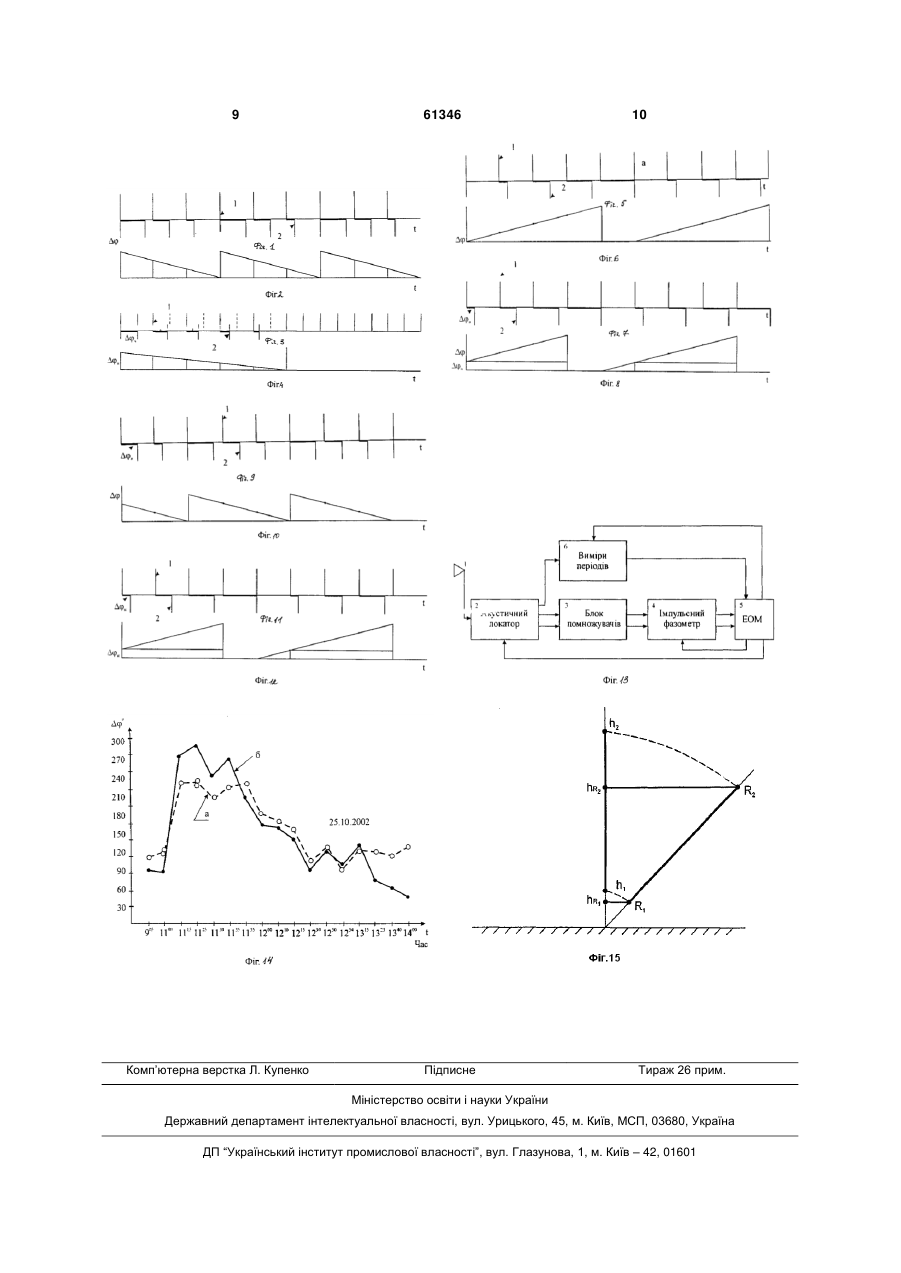
УКРАЇНА (19) UA (11) 61346 (13) C2 (51) МПК G01S 13/95 (2006.01) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС ДО ПАТЕНТУ НА ВИНАХІД (54) СПОСІБ ДИСТАНЦІЙНОГО ВИМІРЮВАННЯ ВІДНОСНИХ ЗМІН ТЕМПЕРАТУРИ ПОВІТРЯ ЗА ДОПОМОГОЮ АКУСТИЧНОГО ЗОНДУВАННЯ АТМОСФЕРИ 1 при вимірюванні відносних змін температури для двох напрямків зондування, зондування для вертикального напрямку здійснюють так, щоб середні висоти зондування при вертикальному і похилому напрямках були однакові, для цього для кожного напрямку початкову фазу вимірюють в двох точках - для вертикального напрямку в точках h1 і h2, для похилого - в точках R1 і R2, так щоб h2-h1=R2-R1, при цьому відносні зміни температури атмосфери для двох напрямків обчислюють за формулою h2h1 R2R1 360 h21 360 R21 , де T Ch21 T CR21 h2 1 * Hh2 * Hh1, R 2 1 * HR 2 * HR1, *Hh1 Hh1 д, ефекту Доплера на вимірювальну фазу хвилі, причому д обчислюється за формулою д 360 TN , Tвип де: Твип - період коливань випромінюваної звукової хвилі, N - кількість періодів в вимірювальному стробі tст.вим., T Tвип Тпр , Тпр - період коливань прийнятої звукової хвилі, Ch2-1 - швидкість звуку на ділянці h2-h1, CR2-1 - швидкість звуку на ділянці R2-R1. (13) 61346 де: Hh1, Hh2, HR1, HR2, - фази хвилі, яка вимірювана в точках h1, h2, R1, R2 відносно, д - помилка, яка виникає за рахунок впливу (11) *HR2 HR2 д, UA *HR1 HR1 д, C2 *Hh2 Hh2 д, (19) (21) 2003010113 (22) 03.01.2003 (24) 15.05.2006 (46) 15.05.2006, Бюл. № 5, 2006 р. (72) Сліпченко Микола Іванович, Дєлов Іван Акіндінович (73) ХАРКІВСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ РАДІОЕЛЕКТРОНіКИ (56) UA 46524, 15.05.2002 SU1709263, 30.01.1992 SU 1178209, 07.02.1993 RU 2000112085, 10.04.2002 US 4222265, 16.09.1980 US 4761650, 02.08.1988 DE 739094, 24.05.1989 (57) Спосіб дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, здійснення моностатичного зондування атмосфери вертикально або під кутом до горизонту, причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час для кожного напрямку, множення прийнятих коливань на коефіцієнт n, який визначають з умови одержання необхідної точності при збереженні однозначності фази, вимір початкової фази прийнятих коливань для кожного напрямку, обчислення різниці обмірюваних початкових фаз для заданих напрямків і визначення різниці швидкостей звуку з наступним визначенням відносних змін температури для двох напрямків, який відрізняється тим, що одночасно з вимірюванням фази хвилі в кожній точці здійснюють вимірювання частоти Доплера для обох напрямків зондування і враховують її при вимірюванні початкового фазового зсуву як помилку Д 2 3 Винахід відноситься до радіолокаційної метеорології, а саме до акустичних способів вимірювання параметрів атмосфери, і може бути використаний при складанні радіокліматичних карт і в роботах з контролю забруднення атмосфери. Відомий спосіб дистанційного виміру температури повітря за допомогою акустичного зондування [Красненко Н.П. Акустическое зондирование атмосферы, Новосибирск, изд. Наука, Сибирское отделение, 1986, С.112-118] у бістатичному режимі зондування шляхом виміру часу находження сигналу з двох близьких висот і його обмірюваній тимчасовій затримці находження сигналу для цих висот і відомій для цих висот різниці висот визначають швидкість звуку як С=(Н2-Н1)1, а потім визначають температуру повітря для цієї ділянки висот як 0 2 T =[(H2-H1)Q1] , де Н2 і H1 - прилеглі висоти; - часовий зсув; Q - коефіцієнт. Недоліком такого способу є низька точність 0 визначення температури (нижче 1 К) за рахунок того, що виміряються безпосередньо самі часові зсуви, які мають малі абсолютні величини, що призводить до високої відносної помилки при вимірі температури, а також відносна складність через розкиданість точок випромінювання і прийому, зв'язана з використанням у ньому бістатичного режиму зондування, що вимагає рознесення місця випромінювання звуку і прийому звукових ехосигналів. Найбільш близьким за технічною суттєвістю до заявленого є спосіб дистанційного виміру температури повітря за допомогою акустичного зондування атмосфери [патент України №46524 А, 6 МПК G01S13/95, 15.05.2002, Бюл. №5], що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом перетворення прийнятих звукових коливань в електричні, визначенні швидкості звуку, здійсненні моностатичного зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час t для кожного випромінювання, множення цих коливань на коефіцієнт n, який визначають з умови одержання необхідної точності при збереженні однозначності фази, вимір початкової фази прийнятих коливань для кожного напрямку, обчисленні різниці вимірюваних початкових фаз між двома наступними вимірами і за формулою визначають різниці швидкостей звуку з наступним визначенням відносних змін температури за часом від випромінювання до випромінюванню послідовних акустичних хвиль чи за більш тривалі інтервали часу. Недоліком такого способу є те, що в ньому не враховують вплив ефекту Допплера на вимірювальні початкові фази прийнятих звукових хвиль, що веде до помилок особливо суттєвим за величиною при використанні малого коефіцієнта множення частоти. В основу винаходу спосіб дистанційного вимірювання відносних змін температури повітря за 61346 4 допомогою акустичного зондування атмосфери поставлено задачу шляхом врахування впливу ефекту Допплера при вимірюванні початкових фаз сигналу і вимірюванні початкових фаз для кожного напрямку зондування в двох точках таким чином, щоб середня висота зондування при вертикальному напрямку була рівна середньої висоті при похилому напрямку при моно-статичному зондуванні вертикально чи під кутом до обрію, забезпечити більш високу точність способу. Ця задача вирішена таким чином. У способі дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери , що полягає у випромінюванні в атмосферу пакета гармонійних коливань звуку і його прийомі, перетворенні прийнятих звукових коливань в електричні, визначенні за відомими формулами швидкості звуку, а потім визначенні температури, здійсненні моно-статичного зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час для кожного напрямку, що відповідає однаковій дальності прийому для кожного випромінювання, множення цих коливань на коефіцієнт n, що визначають з умови одержання необхідної точності при збереженні однозначності фази прийнятих коливань для кожного випромінювання, вимір початкової фази прийнятих коливань для кожного напрямку, обчислення різниці обмірюваних початкових фаз для заданих напрямків і за формулою визначення різниці швидкості звуку з наступним визначенням відносних змін температури для двох напрямків, згідно винаходу одночасно з вимірюванням фази хвилі в кожній точці здійснюють вимірювання частоти Допплера для обох напрямків зондування для врахування її при вимірюванні початкового фазового зсуву як помилку д при вимірюванні відносних змін температури для двох напрямків зондування, для більш точнішого врахування висотного градієнта температури зондування для вертикального напрямку здійснюють так, щоб середні висоти зондування при вертикальному і похилому напрямкам були однакові, для цього для кожного напрямку початкову фазу вимірюють в двох точках: для вертикального напрямку в точках h1 і h2, для похилого - в точках R1 і R2, так, щоб h2-h1=R2-R1, при цьому відносні зміни температури атмосфери для двох напрямків обчислюють за формулою 360 h21 360 R21 h2h1 R2 R1 T Ch21 T CR21 , де р2-1=*Hh2-*Hh1, R2-1=*HR2-*HR1, *Hh1=*Hh1д, *Hh2=*Hh2д, *HR1=*HR1д, *HR2=*HR2д, де - Hh1, Hh2, HR1, Hh2 - фаза хвилі, яка вимірювана в точках h1, h2, R1, R2 відносно, д - помилка, яка виникає за рахунок впливу ефекту Допплера на вимірювальну фазу хвилі, 5 причому д обчислюється за формулою 360TN д , де Твип - період коливань виTВИП промінюваної звукової хвилі, N - число періодів в випромінюваному стробі tст.вим, Т=Твип-Тпр, Тпр період коливань прийнятої звукової хвилі, Ch2-1 - швидкість звука на ділянці h2-h1, CR2-1 - швидкість звука на ділянці R2-R1. Розглянемо більш докладно запропонований спосіб. На Фіг.1 представлені імпульси для запуску лічильника фази, які сформовані з коливань опорної (випромінювальної) частоти у вигляді вертикальних ліній, що направлені вниз, для випадку, коли ТпрТвип. На Фіг.7, 8 те саме, що й на Фіг.3, 4, але для випадку, коли Тпр>Твип. На Фіг.4 і Фіг.8 розглядується випадок, коли величина вимірювального строба фазометра менше, або дорівнює періоду биття між коливаннями випромінюваної і прийнятої частотами. На Фіг.9, 10 те саме що й на Фіг.3, 4, але для випадку, коли період биття між коливаннями випромінюваної і прийнятої частотами значно менше величини вимірювального строба. На Фіг.11, 12 те саме, що й на Фіг.7, 8, але для випадку, коли період биття між коливаннями випромінюваної і прийнятої частотами значено менше величини вимірювального строба фазометра. На Фіг.13 представлена функціональна схема пристрою, за допомогою якого можна реалізувати запропонований спосіб. На Фіг.14 представлено графік виміряних початкових фаз за період t на одній висоті без урахування ефекту Допплера (8а) і з урахуванням ефекту Допплера (8б). Вимірювання проводились на частоті 1кГц. На Фіг.15 схематично представлено зондування при двох різних кутах. В прототипі для врахування впливу висотного градієнту температури вимірюють градієнт температури на вузькому інтервалі висот і додають його величину до всієї величини висоти h, яку використовують в експерименті. Це також приводить до помилки в вимірювальної відносній величини температури для двох напрямків зондування. Цю помилку враховують при використанні запропонованого способу. Одночасно для кожного напрямку зондування при вимірюванні початкової фази коливань вимірюють частоту Допплера для врахування її при вимірювання фазового зсуву як помилку д при вимірюванні відносних змін температури повітря для двох напрямків зондування. 61346 6 Справа в тому, що частота Допплера має вплив на вимірювальну початкову фазу сигналу як систематична помилка, і ії можна врахувати. Для пояснення звернемося до Фіг.1, 2 і Фіг.3, 4. Ha Фіг.1, 2 у вигляді імпульсів зображені коливання двох частот: коливання випромінюваної частоти звукових хвиль (1) і коливання прийнятої частоти звукових хвиль (20 для випадку, коли період прийнятої звукової хвилі Тпр менше періоду коливань випромінюваної звукової хвилі Твип. Відзначимо, що ефект Допплера починає виявлятися в момент початку приймання звукової хвилі, якщо вона розсіялась об'ємом атмосферних неоднорідностей, що рухається, тобто з цього моменту починає виявлятися ефект Допплера, який полягає у тому, що між прийнятими коливаннями звукової хвилі і випромінюваними коливаннями з кожним періодом змінюватиметься фазовий зсув (у даному випадку він зменшується) на величину Т=Твип-Тпр, фазовий зсув розглядається відносно фази випромінюваних коливань. Досягнувши нульового значення, різність фазового зсуву між Фіми коливаннями з наступного періоду має максимальне значення і процес повторюватиметься. За період вимірювального строба (tвим) ми вимірюємо середнє значення фазового зсуву, яке для випадку, коли час зміни фазового зсуву від максимального його значення і до нуля буде дорівнювати вимірювальному стробу, і складатиме макс/2. макс визначають з наступного відношення T360 Т С.ВИМ д N , де Т - різність між TВИП ТВИП періодом випромінюваних коливань звукової хвилі (Твип) і періодом коливань звукової хвилі, що приймаються (Тпр). Величину Тпр визначають за відомою частотою випромінюваних звукових коливань, tc.вим - строб, що вимірюється. На Фіг.3, 4, ці ж самі два коливання (F1пр і F2пр), але для випадку, коли між цими коливаннями є початковий фазовий зсув н. Як випливає з Фіг.3, 4 величина н з кожним періодом буде зменшуватися на величину T. У цьому випадку початковий фазовий зсув н під впливом ефекту Допплера за час вимірювального строба tc.вим зменшиться на величину ΤΝ, де N - число періодів у вимірювальному стробі, а середня величина вимірювання н буде занижена на величину Т360 д N. Т Отже для того, щоб урахувати цю помилку, ми повинні до вимірювальної величини н додати величину д. Аналогічна картина має місце і для випадку, коли Тпр>Твип. Графіки, що пояснюють вплив ефекту Допплера в даному випадку, зображені на Фіг.7, 8. Як випливає з Фіг.7, 8, ефект Допплера виявляється в цьому випадку таким чином, що фазовий зсув між коливаннями Твип і тпр під впливом ефекту Допплера зростає, і за час вимірювального стробу tc вим зростає, досягаючи максимального значення н макс, ( макс Т360 N . TВИП 7 61346 8 Середня величина вимірюваного в даному ра1, а вихід - з блоком помножувачів частоти 3, вихід якого підключено до входу імпульсного фазометра зі початкового зсуву н є завищувана на величи4, вихід якого вихід якого підключено до ЕВМ 5, ну макс/2. виходи якої з'єднані зі входами акустичного локаОтже, ми розглянули вплив ефекту Допплера і тора 2 і з імпульсним фазометром 4, причому помврахування його впливу на вимірювальну величиножувач частоти містить перемикач, за допомогою ну менше ніж період биття tс.вимТб. якого коефіцієнт множення n дискретно може зміВ цьому разі, коли період биття буде значно нюватися від n=nмін до n=nмакс (у нашому випадку в менше величини tс.вим, картина впливу ефекту реалізованому пристрої nмін=1, а nмакс=32), вимірюДопплера на вимірювальну величину н буде вач частоти або періодів прийнятих ехо-сигналів 6. виглядати інакше. Для пояснення сказаного звервхід якого підключено до виходу акустичного локанемося до Фіг.9, 10 і Фіг.11, 12, де зображені гратора 2, а вихід - до входу ЕВМ 5. фіки, що пояснюють вплив ефекту Допплера на Пристрій працює наступним чином. За сигнавимірювальну величину н для випадку, коли лом з ЕВМ 5 акустичний локатор 2 через акустичну Тпр>Твип (Фіг.9, 10) і коли Тпр
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of remote measurements for determining relative changes of air temperature by acoustic air sounding
Автори англійськоюSlipchenko Mykola Ivanovych, Delov Ivan Ankindinovych
Назва патенту російськоюСпособ дистанционных измерений для определения относительных изменений температуры воздуха с помощью акустического зондирования атмосферы
Автори російськоюСлипченко Николай Иванович, Делов Иван Акиндинович
МПК / Мітки
МПК: G01S 13/95
Мітки: повітря, дистанційного, спосіб, вимірювання, відносних, температури, зондування, атмосфери, допомогою, акустичного, змін
Код посилання
<a href="https://ua.patents.su/5-61346-sposib-distancijjnogo-vimiryuvannya-vidnosnikh-zmin-temperaturi-povitrya-za-dopomogoyu-akustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери</a>
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: допомогою, зондування, відносних, акустичного, дистанційного, атмосфери, повітря, змін, температури, вимірювання, спосіб
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46520
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95
Мітки: повітря, вимірювання, змін, спосіб, дистанційного, зондування, відносних, атмосфери, допомогою, акустичного, температури
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи...
Спосіб дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46521
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: виміру, дистанційного, зондування, відносних, спосіб, температури, атмосфери, повітря, акустичного, допомогою, змін
Формула / Реферат:
Спосіб дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери, що полягає у випромінюванні в атмосферу пакета гармонічних коливань звуку, його прийомі, перетворенні прийнятих звукових коливань в електричні, визначенні швидкості звуку, визначенні температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за кутом місця напрямках, у вертикальному і під...
Спосіб дистанційного вимірювання висотних профілів температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 58456
Опубліковано: 15.05.2006
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: допомогою, вимірювання, профілів, зондування, дистанційного, повітря, акустичного, температури, спосіб, висотних, атмосфери
Формула / Реферат:
Заявка належить до галузі медицини, а саме онкології, і може бути використана при лікуванні хворих з нерезектабельними метастазами раку яєчника.Сьогодні основним методом лікування хворих з нерезектабельними метастазами раку яєчника в печінку є 3-4 курси системної поліхіміотерапії цисплатин 75мг/м2 + циклофосфан 750мг/м2, або паклітаксел 175мг/м2 + цисплатин75 мг/м2 [1].80% вперше виявлених хворих на рак яєчника мають занедбану...
Спосіб дистанційного вимірювання висотних профілів температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46523
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: дистанційного, допомогою, атмосфери, повітря, зондування, спосіб, висотних, вимірювання, профілів, акустичного, температури
Формула / Реферат:
Спосіб дистанційного вимірювання висотних профілів температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери у вертикальному напрямку, причому прийом розсіяних...
Попередній патент: Спосіб реклами
Наступний патент: Спосіб лікування інфекційного мононуклеозу, спричиненого вірусом епштейна-барр
Випадковий патент: Спосіб манікюру