Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46520
Опубліковано: 15.05.2002
Формула / Реферат
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи почергово), причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час для кожного напрямку в ту ж точку, що відповідає однаковій дальності прийому, множення цих коливань на коефіцієнт ![]() що визначають з умови одержання необхідної точності при збереженні однозначності фази, вимір початкової фази коливань для кожного напрямку, обчислення різниці обмірюваних початкових фаз для заданих напрямків і визначенні різниці швидкостей за формулою
що визначають з умови одержання необхідної точності при збереженні однозначності фази, вимір початкової фази коливань для кожного напрямку, обчислення різниці обмірюваних початкових фаз для заданих напрямків і визначенні різниці швидкостей за формулою
![]()
де
![]() - початкова фаза прийнятого ехо-сигналу на ділянці
- початкова фаза прийнятого ехо-сигналу на ділянці ![]() (для напрямку
(для напрямку ![]() );
);
![]() - початкова фаза прийнятого ехо-сигналу на ділянці
- початкова фаза прийнятого ехо-сигналу на ділянці ![]() (для напрямку
(для напрямку ![]() );
);
![]() - швидкість звуку на ділянці
- швидкість звуку на ділянці ![]() ;
;
![]() - швидкість звуку на ділянці
- швидкість звуку на ділянці ![]() ;
;
Т - період коливань звукової хвилі (причому приймається ![]() );
);
з наступним визначенням відносних змін температури.
Текст
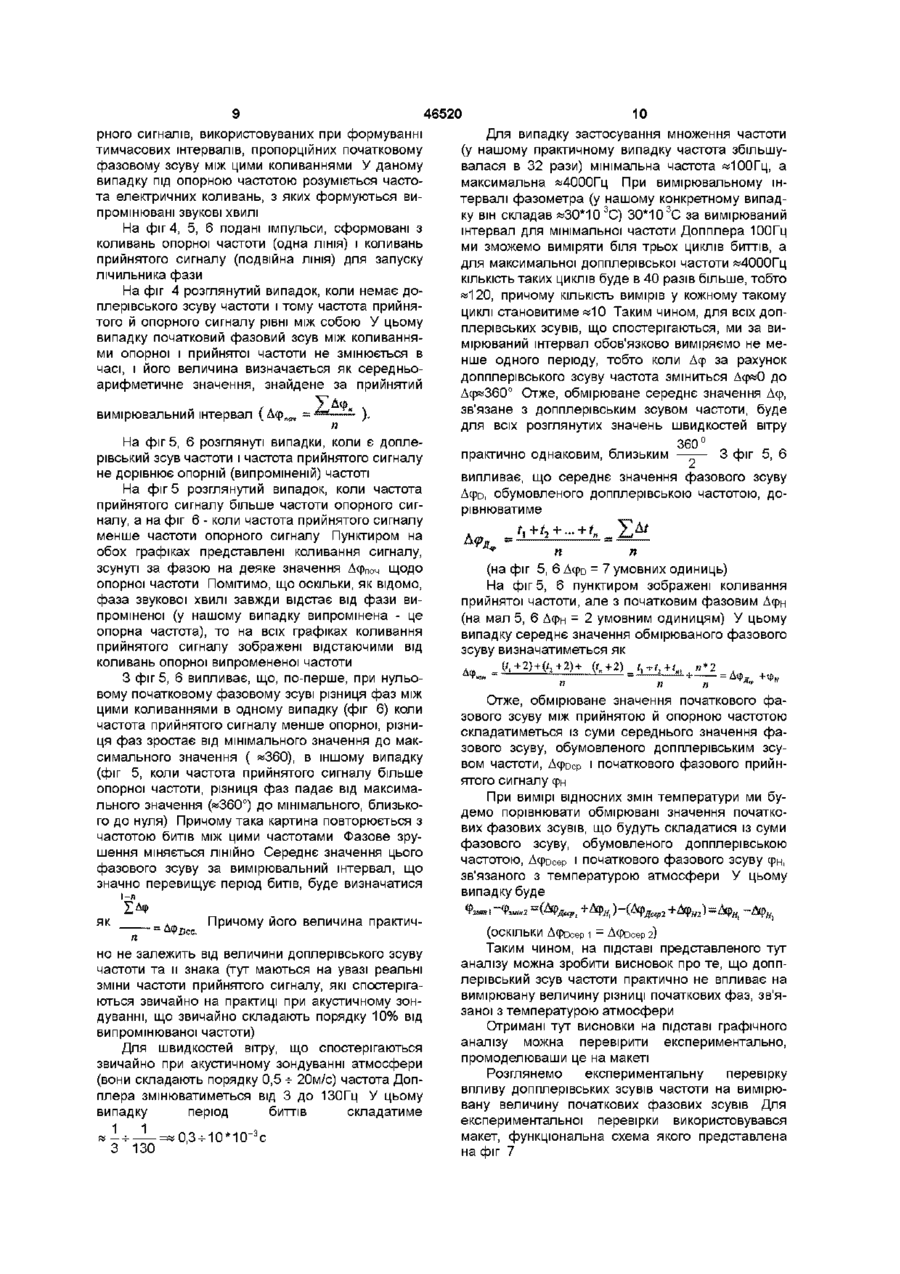
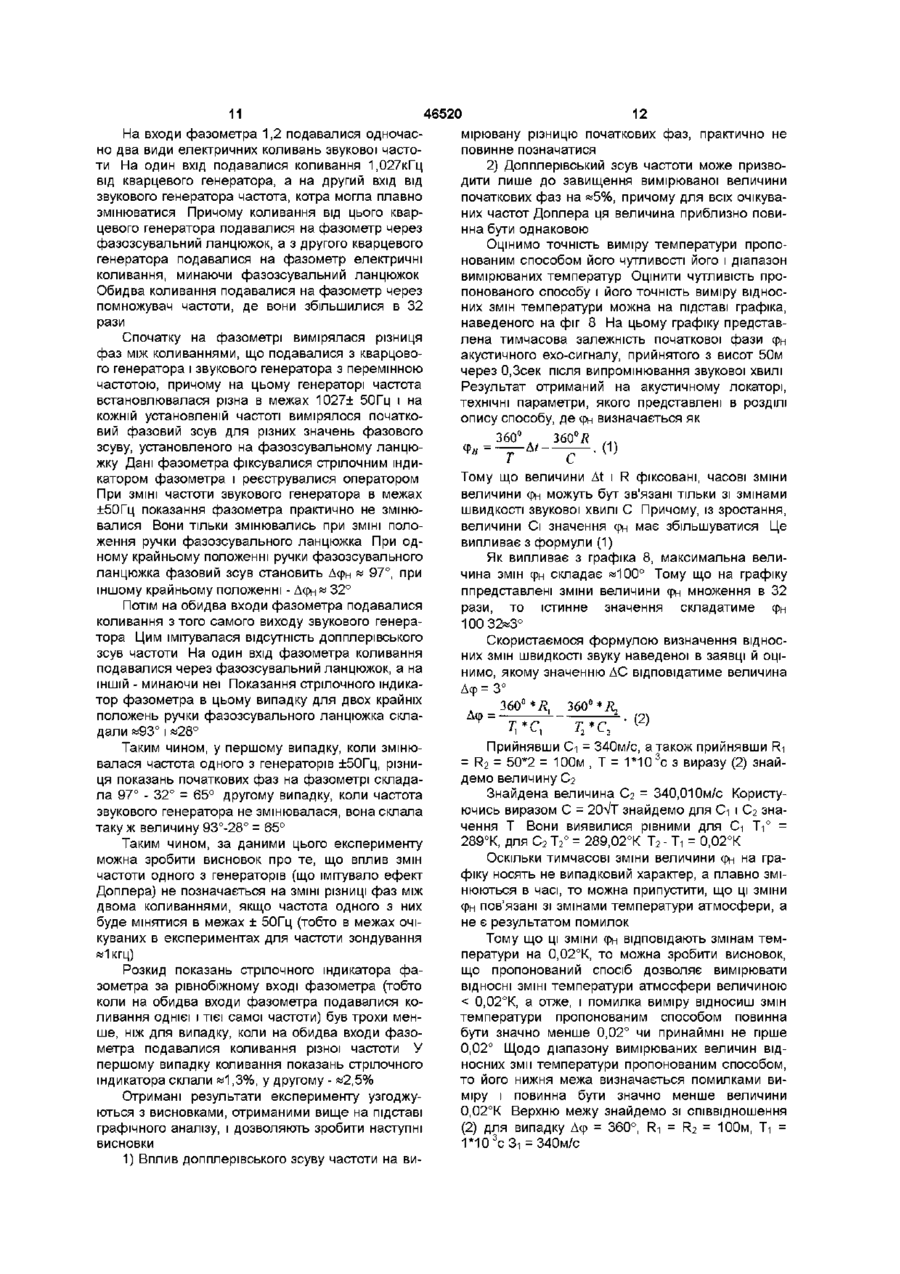
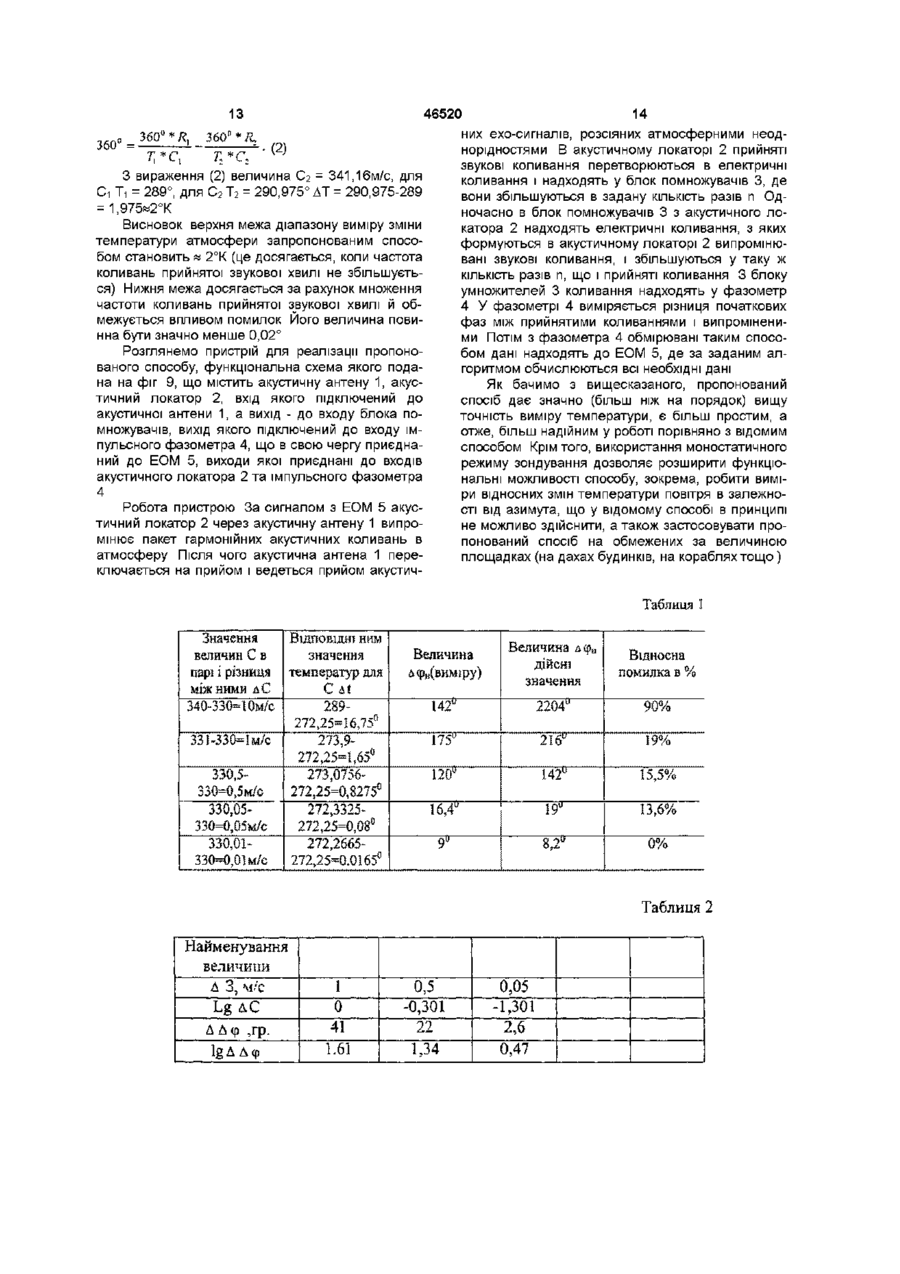
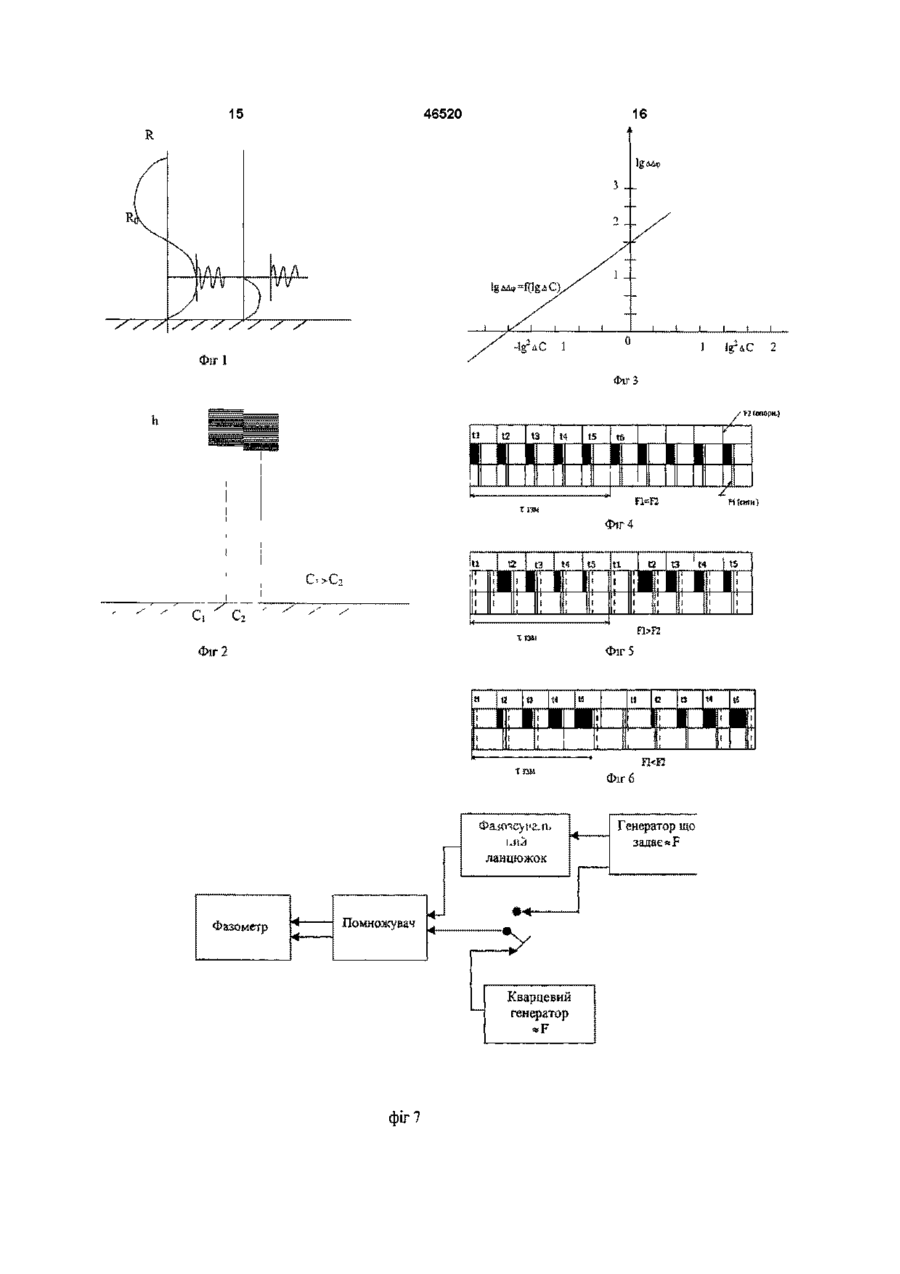
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи почергово), причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час для кожного напрямку в ту ж точку, що відповідає однаковій дальності прийому, множення цих коливань на коефіцієнт п, що визначають з умови одержання необхідної точності при збереженні однозначності фази, вимір початкової фази коливань для кожного напрямку, обчислення різниці обмірюваних початкових фаз для заданих напрямків і визначенні різниці швидкостей за формулою Фн, -Фн, 360° Ri ТС 360° R 2 ТС 2 Де Фн, - початкова фаза прийнятого ехо-сигналу на ДІЛЯНЦІ R., (для напрямку ct-|), Фн2 - початкова фаза прийнятого ехо-сигналу на ДІЛЯНЦІ R2 (для напрямку ct2), С-| - швидкість звуку на ДІЛЯНЦІ R-], с 2 - швидкість звуку на ДІЛЯНЦІ R2 , Т - період коливань звукової хвилі (причому приймається R., = R2 ), з наступним визначенням відносних змін температури ю Винахід відноситься до радіолокаційної метеорологи, а саме до акустичних способів вимірювання параметрів атмосфери, і може бути використаний при складанні радюкліматичних карт і в роботах з контролю забруднення атмосфери Відомий спосіб дистанційного вимірювання температури повітря методом радіоакустичного зондування повітря (РАЗ), що включає випромінювання вертикального вгору в атмосферу акустичного імпульсу із синусоїдальним заповненням, опромінення акустичного імпульсу, який поширюється за електромагнітним сигналом, прийом відбитого від акустичного імпульсу електромагнітного сигналу, вимір частоти допплерівського зрушення (Бабкін С І та ш) Деякі результати виміру температури повітря системою радіоакустичного зондування //Труды 5 Всесоюзного совещания по ра диометеорологии, М Московское отд Гидрометеоиздата, 1994р С 281 -284) Недоліком цього способу є сильний вплив на чутливість прийнятого сигналу вітру, що виявляється в порушенні дзеркальності між прийомним і передавальним променем антен через горизонтальне винесення акустичного пакета з точки перетину цих променів або його розвороті за рахунок градієнта швидкості вітру, а також вплив змін температури атмосфери, що виявляється в порушенні умови Брегг і врешті-решт призводить до втрати чутливості, якщо не здійснювати постійно підстроювання випромінюваної частоти звуку до змін температури Усе це ускладнює реалізацію даного способу для роботи його в автоматичному режимі Найбільш близьким за технічною суттєвістю до заявленого є спосіб дистанційного виміру темпе (О 46520 ратури повітря за допомогою акустичного зондування (Красненко Н П Акустическое зондирование атмосферы, Новосибирск, изд Наука, Сибирское отделение, 1986, С 112 - 118) у бістатичному режимі зондування шляхом виміру часу находження сигналу з двох близьких висот і його обмірюваній тимчасовій затримці находження сигналу для цих висот і відомої для цих висот різниці висот визначають швидкість звуку як С = (Нг - Ні)т-і, а потім визначають температуру повітря для цієї ділянки висот як Нг і Н-і - прилеглі висоти, х - часовий зсув, Q - коефіцієнт Недоліком такого способу є низька точність визначення температури (нижче 1°К) за рахунок того, що виміряються безпосередньо самі часові зсуви, які мають малі абсолютні величини, що призводить до високої відносної помилки при вимірі температури, а також відносна складність через розкиданість точок випромінювання і прийому, зв'язана з використанням у ньому бістатичного режиму зондування, що вимагає рознесення місця випромінювання звуку і прийому звукових ехосигналів В основу винаходу способу дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери поставлено задачу шляхом моностатичного зондування в двох різних за азимутом напрямках, виміру початкових фаз для кожного напрямку визначення відносних змін звуку і відносних змін температури повітря забезпечити більш високу точність способу, розширити його функціональні можливості і спростити його Ця задача вирішена таким чином У способі дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що полягає у випромінюванні в атмосферу пакета гармонічних коливань звуку і його прийомі, перетворенні прийнятих звукових коливань в електричні, визначенні за відомими формулами швидкості звуку, а потім визначенні температури, ВІДПОВІДНО до винаходу, здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи почергово), причому прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюють через однаковий з моменту випромінювання час для кожного напрямку в ту ж точку, що визначає однакову дальність прийому для кожного напрямку, множенні цих коливань на коефіцієнт п, що визначають з умови одержання необхідної точності при збереженні однозначності фази, вимірі початкової фази коливань для кожного напрямку, обчисленні різниці початкових фаз для обмірюваних напрямків і за формулою визначення різниці швидкостей звуку 360°^, 360°Д2 де фі - початкова фаза прийнятого ехо-сигналу на ДІЛЯНЦІ R-i, Ф2 - початкова фаза прийнятого ехо-сигналу на ДІЛЯНЦІ R2 (причому приймається Ri = R2), Сі - швидкість звуку на ДІЛЯНЦІ R I , С2 - швидкість звуку на ДІЛЯНЦІ R2, Т - період коливань звукової хвилі, з наступним визначенням відносних змін температури за формулою С = 20VT Розглянемо більш докладно запропонований спосіб На фіг 1 схематично зображено поширення двох звукових хвиль, що відрізняються за довжиною На фіг 2 подано положення двох вимірювальних стробів для двох різних швидкостей звуку в момент часу t через час At після випромінювання звуку На фіг 3 представлена у логарифмічному масштабі залежність різниці між дійсним і вимірюваним значенням Дф у залежності від величини ДС На фіг 4 зображено імпульси, сформовані з коливань опорної частоти (одна ЛІНІЯ) І коливань прийнятого сигналу (подвійна ЛІНІЯ) ДЛЯ запуску лічильника фази (випадок, коли немає допплерівського зсуву частоти) На фіг 5 так само, як і на фіг 4 (але для випадку, коли є присутнім допплерівське зрушення частоти і коли частота прийнятого сигналу більше частоти опорного сигналу) На фіг 6 так само, як і на фіг 5, але для випадку, коли частота прийнятого сигналу менше частоти опорного сигналу На фіг 7 представлена функціональна схема пристроїв для перевірки впливу допплерівських зсувів частоти на вимірювану величину початкових фазових зсувів На фіг 8 - експериментальна залежність вимірюваної початкової фази прийнятої звукової хвилі з дальності 100м для двох різних за кутом місця напрямків На фіг 9 представлена функціональна схема пристрою, за допомогою якого можна реалізувати запропонований спосіб У таблиці 1 представлені передбачувані помилки у визначенні різниці швидкостей звукових хвиль У таблиці 2 представлена залежність величини ІдДфн, від ІдДС, яка розрахована на підставі даних таблиці 1 Суть способу дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери полягає у вимірі відносних змін швидкості звуку С в залежності від кута місця, а потім на підставі отриманих даних обчислюють ВІДНОСНІ зміни температури Визначення відносних змін швидкості звукових хвиль здійснюють на підставі порівняння вимірюваних початкових фаз часових коливань прийнятих звукових хвиль для двох кутів місця, які спостерігаються в один і той самий час з моменту випромінювання, що відповідає однаковій дальності R від джерела звуку В основу способу покладено відомий факт, що фаза звукової хвилі на тій самій відстані R від джерела звуку у фіксований момент часу t залежить тільки від довжини хвилі X, а отже, від швидкості звуку С, оскільки швидкість звуку С з довжиною хвилі X зв'язана відомим співвідношенням 46520 С=— (1) Тут Т - період коливань хвилі, що, як відомо, при ЗМІНІ швидкості звуку С в результаті зміни температури атмосфери Т не змінюється Проте зміна швидкості звуку С і ВІДПОВІДНО ДО ЦІЄЇ ЗМІНИ зміна довжини хвилі X при незмінному періоді коливань звукової хвилі Т призводить, як відомо, до зміни початкового фазового зрушення Дфн між початковою фазою часових коливань прийнятої звукової хвилі фн пр і фазою часових коливань випромшеної звукової хвилі Дфн вип, яку вона мала на момент випромінювання t B m Це фазове зрушення Дфн визначається часом t, необхідним звуковій хвилі, що має швидкість С, аби пройти відстань R з моменту випромінювання звукової хвилі Його величина с С або, якщо представити цей час t c у фазі часових коливань звукової хвилі, одержимо фазовий зсув між фазою часових коливань звукової хвилі, прийнятої з відстані R, фпр і фазою часових коливань випромшеної звукової хвилі у момент и випромінювання ДфВИп іг. """ — }п Z^L Т ЧИ ф *"« —'с ТС (1) Таким чином, на таку величину по фазі (див 1) прийнята звукова хвиля відстане від випромшеної хвилі, пройшовши шлях R і маючи швидкість С З виразу (1) випливає, що чим більше швидкість звуку С, тим на меншу величину по фазі звукова хвиля відстане від фази випромшеної хвилі, проходячи той самий шлях У даному випадку із зростанням величини С значення фнпр зменшується Якщо ж ми будемо порівнювати фазове зрушення між фазою тимчасових коливань випроміненої звукової хвилі фвип, яке вона мала на момент прийому звукової хвилі, тобто через час At після початку випромінювання, то одержимо такий вираз (а - М^к 2я Л По суті вираз (2) є виразом для фази звукової хвилі на момент часу t = At і на відстані R від джерела випромінювання З виразу (2) випливає, що в цьому випадку із зростанням швидкості звуку С різниця фаз Дфнвипр - Афнпр чи Дфн зростатиме, тому що At і R не змінюються, тобто із зростанням швидкості звуку відставання по фазі часових коливань звукової хвилі, що спостерігається на відстані R від джерела звуку, від фази часових коливань випромінюваної звукової хвилі, що вона мала в момент прийому звукової хвилі з відстані R, зменшуватиметься, і фази їх будуть прагнути до фази часових коливань випромінюваної звукової хвилі, що вона мала на момент прийому звукової хвилі Виходить, якщо ми для двох вимірів одержимо різні значення величин Фн, то для більшого з цих значень відповідатиме і велика швидкість звукової хвилі С Таким чином, якщо ми будемо вимірювати значення фн для двох зондувань, що відрізняються за кутом місця, то на підставі виразу (2) зможемо оцінити, для якої з отриманих величин фн значення швидкості звукової хвилі більше, а на підставі по рівняння отриманих величин фн для двох різних за кутом місця зондувань за допомогою виразу (3) знаидемо різницю швидкостей звуку для двох напрямків зондування У виразі (3) Фні - початкова фаза прийнятого ехо-сигналу для напрямку зондування он, Фн2 - початкова фаза прийнятого ехо-сигналу для напрямку зондування аг, R - дальність від джерела звуку до точки відображення звукової хвилі, що для обох напрямків приймається однакової величини, рівної R = CAt, Т - період коливань звукової хвилі, С-і, Сг - значення швидкості звуку для напрямків он, і аг, ВІДПОВІДНО Величини с щ і фнг визначар ються з виразу Нщ> Ні т ~т~с для однакового значення At і R шляхом виміру різниці фаз між фазою електричних коливань, з яких формуються випромінювані звукові хвилі, і яку вони мали в момент часу t = At, і початковою фазою електричних коливань, що виходять у результаті перетворення прийнятої з відстані R звукової хвилі і перетворень в електричні коливання Потім для знайденої величини АС, користуючись відомим співвідношенням С = 20-/т°~, визначають величину ДТ° Підвищення точності способу досягається за рахунок того, що, по-перших, у пропонованому способі замість абсолютної величини швидкостей звуку вимірюють ВІДНОСНІ розходження швидкості ДС, по-друге, у пропонованому способі при вимірі різниці швидкостей звуку на підставі порівняння між собою часу, який необхідно кожнії з порівнюваних звукових хвиль, щоб пройти той самий шлях, використовується фазовий спосіб, що, як відомо, дозволяє з більшою точністю вимірювати тимчасові інтервали, причому, за рахунок застосування множення частоти прийнятих коливань звукових хвиль у п разів, у стільки ж разів збільшується вимірювана різниця фаз, а значить у стільки ж разів зростає точність способу і його чутливість до змін температури Оскільки вибір величини п визначається з умови одержання необхідної точності і чутливості способу при збереженні однозначності фази, то для того щоб не звужувати діапазон вимірюваних змін величини температури, необхідно одночасно застосовувати кілька значень п, розбивши очікуваний діапазон змін температури на діапазони, де буде виконуватиметься умова однозначності фази У пропонованому способі замість бістатичного режиму зондування використовується моностатичний режим, (коли випромінювання звуку і прийом ехо-сигналів ведеться з однієї точки на місцевості), що дозволяє спростити спосіб і позбутися боротьби з прямим проходженням випромененого сигналу замість прийому ехо-сигналів, тому що випромінювання і прийом ведеться в даному випадку з однієї точки на місцевості, дозволяє роз 46520 ширити функціональні можливості способу, наприклад, проводити виміри відносних змін температури атмосфери в залежності від азимута, а також використовувати його на обмежених за величиною ділянках (на дахах будинків, на кораблях і т д ) Розглянемо можливі помилки, що можуть виникнути при вимірі відносних змін температури повітря в залежності від кута місця Для фіксування відстані R у пропонованому способі проводиться стробування за часом, тобто прийом розсіяних атмосферними неоднорідностями акустичних хвиль здійснюється через однаковий з моменту випромінювання час для кожного напрямку у ту саму точку, що відповідає однаковій дальності прийому R для обох напрямків У цьому випадку величина R визначається як Ri = C-iAt для одного напрямку і R2 = C2At для іншого напрямку Це відповідає практично однаковим величинам R при невеликому розходженні швидкостей Однак при вимірі початкової фази прийнятого ехо-сигналу фазометром його вимірюваний часовий строб істотно звужується порівняно зі стробом At У цьому випадку навіть незначне розходження швидкостей Сі і Сг може призвести до істотних помилок при вимірі відносних змін температури в залежності від кута місця за рахунок неповного збігу вимірюваних, стробів фазометра за дальністю для різних значень швидкостей звуку для кожного напрямку Однак, як показав спеціально зроблений аналіз, ця помилка є систематичною помилкою і її можна врахувати, до того ж вона виявляється при істотному розходженні швидкостей звуку в двох напрямках, і зі зменшенням розходження швидкостей у вимірі для двох напрямків а помилка зменшується Нижче представлений аналіз таких помилок і методика їхнього обліку, а також розглянута можливість помилок за рахунок ефекту Допплера Заміна стробування за дальністю на стробування за часом приводить до того, що за рахунок розходження швидкості звукових хвиль для порівнюваних вимірюваних стробів вони за той самий інтервал часу AtCTp проходять різні відрізки часу Це призводить до того, що порівнювані вимірювані строби при вимірі початкових фазових зсуву не цілком перекриваються за дальністю На фіг 2 схематично представлено два вимірювальних строба фазометри для випадку різних швидкостей звуку (Сг > С-і) 3 фіг 2 випливає, що вимірювальні строби для двох швидкостей звуку, що відрізняються, не цілком перекриваються по висоті, що, цілком, призведе до помилки при вимірі різниці усереднених за кожен вимірювальний строб початкових фазових зсувів Для ілюстрації сказаного в таблиці 1 представлені очікувані помилки (5) у визначенні різниці початкових фазових зсувів для різних значень різниці швидкостей звуку ДС для двох сусідніх вимірювальних стробов Розрахунок проводиться таким чином Спочатку для обраних значень ДС обчислювалося середньоарифметичне значення початкової фази для кожного з двох стробів тільки для відстаней, що перекриваються, потім теж обчислювали середньоарифметичне, але вже для реального розташування стробів за дальністю Для розрахунку 271 R Ф=—*-, І О фази 8 використовувався вираз / (Де T - період звукових коливань, у нашому випадку він приймав е рівним 1*10 сек) р Розрахунок проводиться з кроком у 1метр для вимірюваного строба Atcnh = 0 033с і для строба дальності Atch = 0 Зс (це параметри застосовуваного нами на практиці акустичного локатора) З таблиці 1 випливає, що між дійсним значенням Дфн (випадок, коли вимірювані строби цілком перекриваються за висотою і реально обмірюваними значеннями (коли два вимірюваних строба не цілком перекриваються за висотою) існує розходження, яке зі зменшенням величини ДС зменшується Так, для ДС = 1м/с помилка між вимірюваним і дійсним значенням складає «20%, тоді як при ДС = 0,05м/с ця помилка зменшується до 13% і наближається до нуля десь при ДС = 0,015м/с (це випливає з графіка фіг 3, де в логарифмічному масштабі представлена залежність різниці між істинним і обмірюваним значенням Дер у залежності від величини ДС) З фіг 3 випливає, що розходження між обмірюваним та істинним значенням Дер наближається до нуля десь для значень ДС = 0,015м/с У цьому випадку можна не враховувати помилку, пов'язану з неповним збігом вимірюваних стробів Для ДС > 0,015м/с систематичну помилку, обумовлену неповним збігом стробів, необхідно враховувати, розрахувавши и заздалегідь для очікуваних у вимірах значень Дер і Діїстробвипр (Зі збільшенням Дістробвипр помилка зменшується) На підставі представленого тут аналізу можна зробити висновок про те, що заміна стробування за дальністю (висотою) на стробування за часом призводить до систематичної помилки вимірюваних відносних змін температур, що може бути виключена шляхом розрахунку и для очікуваних у вимірах значень Д С Отже, можнаприйти до висновку, що заміна стробування за висотою на стробування за часом не призводить до помилок у вимірюванні відносних змін температури пропонованим способом Тепер розглянемо можливість впливу допплерівського зсуву частоти на точність вимірюваних відносних змін температури Оскільки при акустичному зондуванні температурні неоднорідності, що розсіюють звукові хвилі, переміщаються вітром, то це неминуче призведе до допплерівських зсувів частоти і відстак до зміни фазових характеристик ехо-сигналів Усе це може вплинути на точність вимірюваних початкових фазових зсувів прийнятих акустичних хвиль У зв'язку з цим були проведені спеціальні дослідження цього питання Вплив доплерівського зсуву частоти, пов'язаний з переміщенням температурних неоднорідностей вітром, при вимірюванні початкових фазових зсувів перевірявся графічно і на лабораторному макеті Розглянемо графічну оцінку впливу доплерівських зсувів частоти на вимірювані початкові фазові зсуви Оцінити ВПЛИВ доплерівської частоти на вимірювані початкові фазові зсуви можна шляхом зіставлення тимчасових дюграм прийнятого й опо 46520 рного сигналів, використовуваних при формуванні тимчасових інтервалів, пропорційних початковому фазовому зсуву між цими коливаннями У даному випадку під опорною частотою розуміється частота електричних коливань, з яких формуються випромінювані звукові хвилі На фіг 4, 5, 6 подані імпульси, сформовані з коливань опорної частоти (одна ЛІНІЯ) І коливань прийнятого сигналу (подвійна ЛІНІЯ) ДЛЯ запуску лічильника фази На фіг 4 розглянутий випадок, коли немає доплерівського зсуву частоти і тому частота прийнятого й опорного сигналу рівні між собою У цьому випадку початковий фазовий зсув між коливаннями опорної і прийнятої частоти не змінюється в часі, і його величина визначається як середньоарифметичне значення, знайдене за прийнятий вимірювальний інтервал (Дф явч = — )п На фіг 5, 6 розглянуті випадки, коли є доплерівський зсув частоти і частота прийнятого сигналу не дорівнює опорній (випромшеній) частоті На фіг 5 розглянутий випадок, коли частота прийнятого сигналу більше частоти опорного сигналу, а на фіг 6 - коли частота прийнятого сигналу менше частоти опорного сигналу Пунктиром на обох графіках представлені коливання сигналу, зсунуті за фазою на деяке значення ДфПОч щодо опорної частоти Помітимо, що оскільки, як відомо, фаза звукової хвилі завжди відстає від фази випромшеної (у нашому випадку випромшена - це опорна частота), то на всіх графіках коливання прийнятого сигналу зображені відстаючими від коливань опорної випромененої частоти З фіг 5, 6 випливає, що, по-перше, при нульовому початковому фазовому зсуві різниця фаз між цими коливаннями в одному випадку (фіг 6) коли частота прийнятого сигналу менше опорної, різниця фаз зростає від мінімального значення до максимального значення ( «360), в іншому випадку (фіг 5, коли частота прийнятого сигналу більше опорної частоти, різниця фаз падає від максимального значення («360°) до мінімального, близького до нуля) Причому така картина повторюється з частотою битів між цими частотами Фазове зрушення міняється ЛІНІЙНО Середнє значення цього фазового зсуву за вимірювальний інтервал, що значно перевищує період битів, буде визначатися Причому його величина практич як но не залежить від величини доплерівського зсуву частоти та и знака (тут маються на увазі реальні зміни частоти прийнятого сигналу, які спостерігаються звичайно на практиці при акустичному зондуванні, що звичайно складають порядку 10% від випромінюваної частоти) Для швидкостей вітру, що спостерігаються звичайно при акустичному зондуванні атмосфери (вони складають порядку 0,5 -ь 20м/с) частота Допплера змінюватиметься від 3 до 130Гц У цьому випадку період битв складатиме 1 З 1 130 =«0,3-И0*10"3с 10 Для випадку застосування множення частоти (у нашому практичному випадку частота збільшувалася в 32 рази) мінімальна частота «100Гц, а максимальна «4000Гц При вимірювальному інтервалі фазометра (у нашому конкретному випад3 3 ку він складав «30*10 С) 30*10 С за вимірюваний інтервал для мінімальної частоти Допплера 100Гц ми зможемо виміряти біля трьох циклів биттів, а для максимальної допплерівської частоти «4000Гц КІЛЬКІСТЬ таких циклів буде в 40 разів більше, тобто «120, причому КІЛЬКІСТЬ вимірів у кожному такому циклі становитиме «10 Таким чином, для всіх допплерівських зсувів, що спостерігаються, ми за вимірюваний інтервал обов'язково виміряємо не менше одного періоду, тобто коли Дф за рахунок допплерівського зсуву частота зміниться Дф«0 до Дф«360° Отже, обмірюване середнє значення Дф, зв'язане з допплерівським зсувом частоти, буде для всіх розглянутих значень швидкостей вітру практично однаковим, близьким 360° 3 фіг 5, 6 випливає, що середнє значення фазового зсуву Дфр, обумовленого допплерівською частотою, дорівнюватиме (на фіг 5, 6 Дфо = 7 умовних одиниць) На фіг 5, 6 пунктиром зображені коливання прийнятої частоти, але з початковим фазовим Дфн (на мал 5, 6 Дфн = 2 умовним одиницям) У цьому випадку середнє значення обмірюваного фазового зсуву визначатиметься як Отже, обмірюване значення початкового фазового зсуву між прийнятою й опорною частотою складатиметься із суми середнього значення фазового зсуву, обумовленого допплерівським зсувом частоти, Дфрср і початкового фазового прийнятого сигналу фн При вимірі відносних змін температури ми будемо порівнювати обмірювані значення початкових фазових зсувів, що будуть складатися із суми фазового зсуву, обумовленого допплерівською частотою, Дфрсер і початкового фазового зсуву фн, зв'язаного з температурою атмосфери У цьому випадку буде (ОСКІЛЬКИ Дфрсер 1 = ДфРсер 2) Таким чином, на підставі представленого тут аналізу можна зробити висновок про те, що допплерівський зсув частоти практично не впливає на вимірювану величину різниці початкових фаз, зв'язаної з температурою атмосфери Отримані тут висновки на підставі графічного аналізу можна перевірити експериментально, промоделюваши це на макеті Розглянемо експериментальну перевірку впливу допплерівських зсувів частоти на вимірювану величину початкових фазових зсувів Для експериментальної перевірки використовувався макет, функціональна схема якого представлена на фіг 7 11 46520 12 На входи фазометра 1,2 подавалися одночасмірювану різницю початкових фаз, практично не но два види електричних коливань звукової частоповинне позначатися ти На один вхід подавалися коливання 1,027кГц 2) Допплерівський зсув частоти може призвовід кварцевого генератора, а на другий вхід від дити лише до завищення вимірюваної величини звукового генератора частота, котра могла плавно початкових фаз на «5%, причому для всіх очікувазмінюватися Причому коливання від цього кварних частот Доплера ця величина приблизно повицевого генератора подавалися на фазометр через нна бути однаковою фазозсувальний ланцюжок, а з другого кварцевого Оцінимо ТОЧНІСТЬ виміру температури пропогенератора подавалися на фазометр електричні нованим способом його чутливості його і діапазон коливання, минаючи фазозсувальний ланцюжок вимірюваних температур Оцінити чутливість проОбидва коливання подавалися на фазометр через понованого способу і його точність виміру відноспомножувач частоти, де вони збільшилися в 32 них змін температури можна на підставі графіка, рази наведеного на фіг 8 На цьому графіку представСпочатку на фазометрі вимірялася різниця лена тимчасова залежність початкової фази фн фаз між коливаннями, що подавалися з кварцовоакустичного ехо-сигналу, прийнятого з висот 50м го генератора і звукового генератора з перемінною через О.Зсек після випромінювання звукової хвилі частотою, причому на цьому генераторі частота Результат отриманий на акустичному локаторі, встановлювалася різна в межах 1027± 50Гц і на технічні параметри, якого представлені в розділі кожній установленій частоті вимірялося початкоопису способу, де фн визначається як вий фазовий зсув для різних значень фазового 360° 360°Л зсуву, установленого на фазозсувальному ланцю•Д/жку Дані фазометра фіксувалися стрілочним індит с катором фазометра і реєструвалися оператором Тому що величини At i R фіксовані, часові зміни При ЗМІНІ частоти звукового генератора в межах величини фн можуть бут зв'язані тільки зі змінами ±50Гц показання фазометра практично не змінюшвидкості звукової хвилі С Причому, із зростання, валися Вони тільки змінювались при ЗМІНІ половеличини Сі значення фн має збільшуватися Це ження ручки фазозсувального ланцюжка При одвипливає з формули (1) ному крайньому положенні ручки фазозсувального Як випливає з графіка 8, максимальна велиланцюжка фазовий зсув становить Дсрн » 97°, при чина змін фн складає «100° Тому що на графіку іншому крайньому положенні - Дсрн« 32° ппредставлені зміни величини фн множення в 32 рази, то істинне значення складатиме фн Потім на обидва входи фазометра подавалися коливання з того самого виходу звукового генера100 32«3° тора Цим імітувалася відсутність допплерівського Скористаємося формулою визначення відносзсув частоти На один вхід фазометра коливання них змін швидкості звуку наведеної в заявці й оціподавалися через фазозсувальний ланцюжок, а на нимо, якому значенню ДС відповідатиме величина ІНШІЙ - минаючи неї Показання стрілочного індикаДф = 3° тор фазометра в цьому випадку для двох крайніх 360° *Я 360° *Я положень ручки фазозсувального ланцюжка складали «93°і«28° Таким чином, у першому випадку, коли змінювалася частота одного з генераторів ±50Гц, різниця показань початкових фаз на фазометрі складала 97° - 32° = 65° другому випадку, коли частота звукового генератора не змінювалася, вона склала таку ж величину 93°-28° = 65° Таким чином, за даними цього експерименту можна зробити висновок про те, що вплив змін частоти одного з генераторів (що імітувало ефект Доплера) не позначається на ЗМІНІ різниці фаз між двома коливаннями, якщо частота одного з них буде мінятися в межах ± 50Гц (тобто в межах очікуваних в експериментах для частоти зондування «1кгц) Розкид показань стрілочного індикатора фазометра за рівнобіжному вході фазометра (тобто коли на обидва входи фазометра подавалися коливання однієї і тієї самої частоти) був трохи менше, ніж для випадку, коли на обидва входи фазометра подавалися коливання різної частоти У першому випадку коливання показань стрілочного індикатора склали «1,3%, у другому - «2,5% Отримані результати експерименту узгоджуються з висновками, отриманими вище на підставі графічного аналізу, і дозволяють зробити наступні висновки 1) Вплив допплерівського зсуву частоти на ви Дф = L 2. _ ™ Прийнявши Сі = 340м/с, а також прийнявши Ri = R2 = 50*2 = 100м , Т = 1 *10 Зс з виразу (2) знайдемо величину С2 Знайдена величина С2 = 340,010м/с Користуючись виразом С = 20VT знайдемо для Сі і С2 значення Т Вони виявилися рівними для Сі Ті° = 289°К, для С2 Т2° = 289,02°К Т2 - Ті = 0,02°К Оскільки тимчасові зміни величини фн на графіку носять не випадковий характер, а плавно змінюються в часі, то можна припустити, що ці зміни Фн пов'язані зі змінами температури атмосфери, а не є результатом помилок Тому що ці зміни фн відповідають змінам температури на 0,02°К, то можна зробити висновок, що пропонований спосіб дозволяє вимірювати ВІДНОСНІ ЗМІНІ температури атмосфери величиною < 0,02°К, а отже, і помилка виміру відносиш змін температури пропонованим способом повинна бути значно менше 0,02° чи принаймні не гірше 0,02° Щодо діапазону вимірюваних величин відносних змії температури пропонованим способом, то його нижня межа визначається помилками виміру і повинна бути значно менше величини 0,02°К Верхню межу знайдемо зі співвідношення (2) для випадку Дф = 360°, Ri = R2 = 100м, Ті = 1*10 3 сЗі = 340м/с 13 360° *R, 14 них ехо-сигналів, розсіяних атмосферними неоднорідностями В акустичному локаторі 2 прийняті звукові коливання перетворюються в електричні коливання і надходять у блок помножувачів 3, де вони збільшуються в задану КІЛЬКІСТЬ разів п Одночасно в блок помножувачів 3 з акустичного локатора 2 надходять електричні коливання, з яких формуються в акустичному локаторі 2 випромінювані звукові коливання, і збільшуються у таку ж КІЛЬКІСТЬ разів п, що і прийняті коливання 3 блоку умножителей 3 коливання надходять у фазометр 4 У фазометрі 4 виміряється різниця початкових фаз між прийнятими коливаннями і випромшеними Потім З фазометра 4 обмірювані таким способом дані надходять до ЕОМ 5, де за заданим алгоритмом обчислюються всі необхідні дані 46520 (2) З вираження (2) величина C-z = 341,16м/с, для Сі Ті = 289°, для С2 Т2 = 290,975° ДТ = 290,975-289 О = 1,975«2 К Висновок верхня межа діапазону виміру зміни температури атмосфери запропонованим способом становить и 2°К (це досягається, коли частота коливань прийнятої звукової хвилі не збільшується) Нижня межа досягається за рахунок множення частоти коливань прийнятої звукової хвилі й обмежується впливом помилок Його величина повинна бути значно менше 0,02° Розглянемо пристрій для реалізації пропонованого способу, функціональна схема якого подана на фіг 9, що містить акустичну антену 1, акустичний локатор 2, вхід якого підключений до акустичної антени 1, а вихід - до входу блока помножувачів, вихід якого підключений до входу імпульсного фазометра 4, що в свою чергу приєднаний до ЕОМ 5, виходи якої приєднані до входів акустичного локатора 2 та імпульсного фазометра 4 Робота пристрою За сигналом з ЕОМ 5 акустичний локатор 2 через акустичну антену 1 випромінює пакет гармонійних акустичних коливань в атмосферу Після ЧОГО акустична антена 1 переключається на прийом і ведеться прийом акустич Як бачимо з вищесказаного, пропонований спосіб дає значно (більш ніж на порядок) вищу точність виміру температури, є більш простим, а отже, більш надійним у роботі порівняно з відомим способом Крім того, використання моностатичного режиму зондування дозволяє розширити функціональні можливості способу, зокрема, робити виміри відносних змін температури повітря в залежності від азимута, що у відомому способі в принципі не можливо здійснити, а також застосовувати пропонований спосіб на обмежених за величиною площадках (на дахах будинків, на кораблях тощо ) Таблиця Значення величин С в парі і різниця між ними &С 340-330=10м/с 331-330=3 м/с 330,5330=055м/с 330,05330=0,05м/с 330,01330=0,01 м/с ВІДПОВІДНІ НИМ значення температур для С At 289272,25=16,75° 273,9272,25-1,65° 273,0756272,25=0,8275° 272,3325272,25-0,08° 272,2665272,25=0.0165° Величина іфн(виміру) 142 Величина д Акустичний локатор —» 3 Блок помножувачів Імпульсний фазометр —» 4 —і t , Фіг.9 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 S EOM
ДивитисяДодаткова інформація
Автори англійськоюDelov Ivan Ankindinovych, Slipchenko Mykola Ivanovych
Автори російськоюДелов Иван Акиндинович, Слипченко Николай Иванович
МПК / Мітки
МПК: G01S 13/95
Мітки: вимірювання, температури, дистанційного, допомогою, спосіб, повітря, атмосфери, змін, відносних, зондування, акустичного
Код посилання
<a href="https://ua.patents.su/9-46520-sposib-distancijjnogo-vimiryuvannya-vidnosnikh-zmin-temperaturi-povitrya-za-dopomogoyu-akustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери</a>
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: змін, відносних, зондування, атмосфери, спосіб, допомогою, повітря, вимірювання, акустичного, температури, дистанційного
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування
Номер патенту: 46519
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95
Мітки: анізотропії, акустичного, виміру, інтенсивності, дистанційного, допомогою, атмосфери, температурних, зондування, пульсацій, спосіб
Формула / Реферат:
Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування, що включає випромінювання в атмосферу пакета гармонічних коливань звуку у вертикальному напрямку і під кутом до вертикалі одночасно чи по черзі з однієї точки на місцевості, прийом розсіяних температурними неоднорідностями акустичних хвиль, перетворення прийнятих звукових коливань в електричні, вимір амплітуди...
Спосіб акустичного зондування атмосфери
Номер патенту: 46160
Опубліковано: 15.05.2002
Автори: Карташов Володимир Михайлович, Васильченко Андрій Олександрович
Мітки: зондування, акустичного, атмосфери, спосіб
Формула / Реферат:
Спосіб акустичного зондування атмосфери, який полягає у випромінюванні в атмосферу в довільно вибраному напрямку акустичних синусоїдальних коливань, прийомі акустичних коливань, розсіяних на природних неоднорідностях атмосфери, вимірі параметрів розсіяного сигналу, обчисленні параметрів атмосфери по виміряних значеннях параметрів розсіяного сигналу, який відрізняється тим, що попередньо виконують аналіз розподілу за напрямками зовнішніх...
Пристрій для радіоакустичного зондування атмосфери
Номер патенту: 46150
Опубліковано: 15.05.2002
Автори: Бутакова Світлана Вікторівна, Бусловський Сергій Федорович, Ульянов Юрій Миколайович, Бєдін Віктор Савович
МПК: G01S 13/95
Мітки: радіоакустичного, зондування, пристрій, атмосфери
Формула / Реферат:
Пристрій для радіоакустичного зондування атмосфери, що містить комбіновану радіоакустичну антенну систему, розташовану на поверхні Землі, акустичний передавач і доплерівський радіолокатор, який містить антенний комутатор, імпульсний радіопередавач, радіоприймач, блок обробки інформації, до якого підключено індикатор метеовеличин, який відрізняється тим, що антенна система виконана у вигляді кільцевої антенної решітки з числом елементів,...
Пристрій для дистанційного вимірювання температури
Номер патенту: 6812
Опубліковано: 29.12.1994
Автори: Дедішин Ігор Ярославович, Чечулін Ігор Вітальєвич, Сидоренко Володимир Володимирович, Поліщук Віталій Мелентьєвич, Аніскін Владімір Ільіч, Півнев Євгеній Анатолієвич
Мітки: температури, вимірювання, пристрій, дистанційного
Формула / Реферат:
Устройство для дистанционного измерения температуры, содержащее датчик температуры, включенный в звено обратной связи преобразователя сопротивления в напряжение и дифференциальный усилитель напряжения, отличающееся тем, что в него введен генератор прямоугольных импульсов, первый и второй блоки выборки-хранения и инвертор, при этом к инверсному и прямому входам дифференциального усилителя напряжения подключены выходы соответственно первого и...
Попередній патент: Спосіб дистанційного виміру анізотропії інтенсивності температурних пульсацій атмосфери за допомогою акустичного зондування
Наступний патент: Спосіб дистанційного виміру відносних змін температури повітря за допомогою акустичного зондування атмосфери
Випадковий патент: Автономний пристрій контролю та видалення забруднень в іскровому зазорі та на поверхні ізолятора свічки запалювання двигунів внутрішнього згоряння