Спосіб керування перетворювачем частоти
Номер патенту: 65329
Опубліковано: 15.03.2004
Автори: Казачковський Микола Миколаєвич, Якупов Дмитро Володимирович
Формула / Реферат
1. Спосіб керування перетворювачем частоти, згідно з яким задають узагальнений просторовий вектор заданого вихідного струму та допустимий модуль похибки за струмом, безперервно вимірюють вихідні струми, визначають вектор поточного вихідного струму, вектор похибки як різницю між векторами заданого та поточного вихідних струмів та одночасно відкривають ключі, кількість яких дорівнює кількості фаз навантаження, який відрізняється тим, що у випадку перевищення модулем вектора похибки допустимої величини з усіх можливих станів перетворювача частоти вибирають той стан, узагальнений вектор напруги якого знаходиться найближче до вектора похибки, а в протилежному випадку зберігають попередній стан.
2. Спосіб за п. 1, який відрізняється тим, що додатково вимірюють фазовий зсув ![]() між першими гармоніками вихідних напруги та струму перетворювача частоти і у випадку, коли кут
між першими гармоніками вихідних напруги та струму перетворювача частоти і у випадку, коли кут ![]() між векторами заданого струму та похибки лежить у межах
між векторами заданого струму та похибки лежить у межах ![]() , вибирають один із нульових станів перетворювача частоти, якому відповідають нульові рівні всіх його вихідних фазних напруг.
, вибирають один із нульових станів перетворювача частоти, якому відповідають нульові рівні всіх його вихідних фазних напруг.
3. Спосіб за пп. 1, 2, який відрізняється тим, що вибирається той з можливих нульових станів, якому відповідає найменша кількість перемикань ключів перетворювача частоти порівняно з його попереднім станом.
Текст
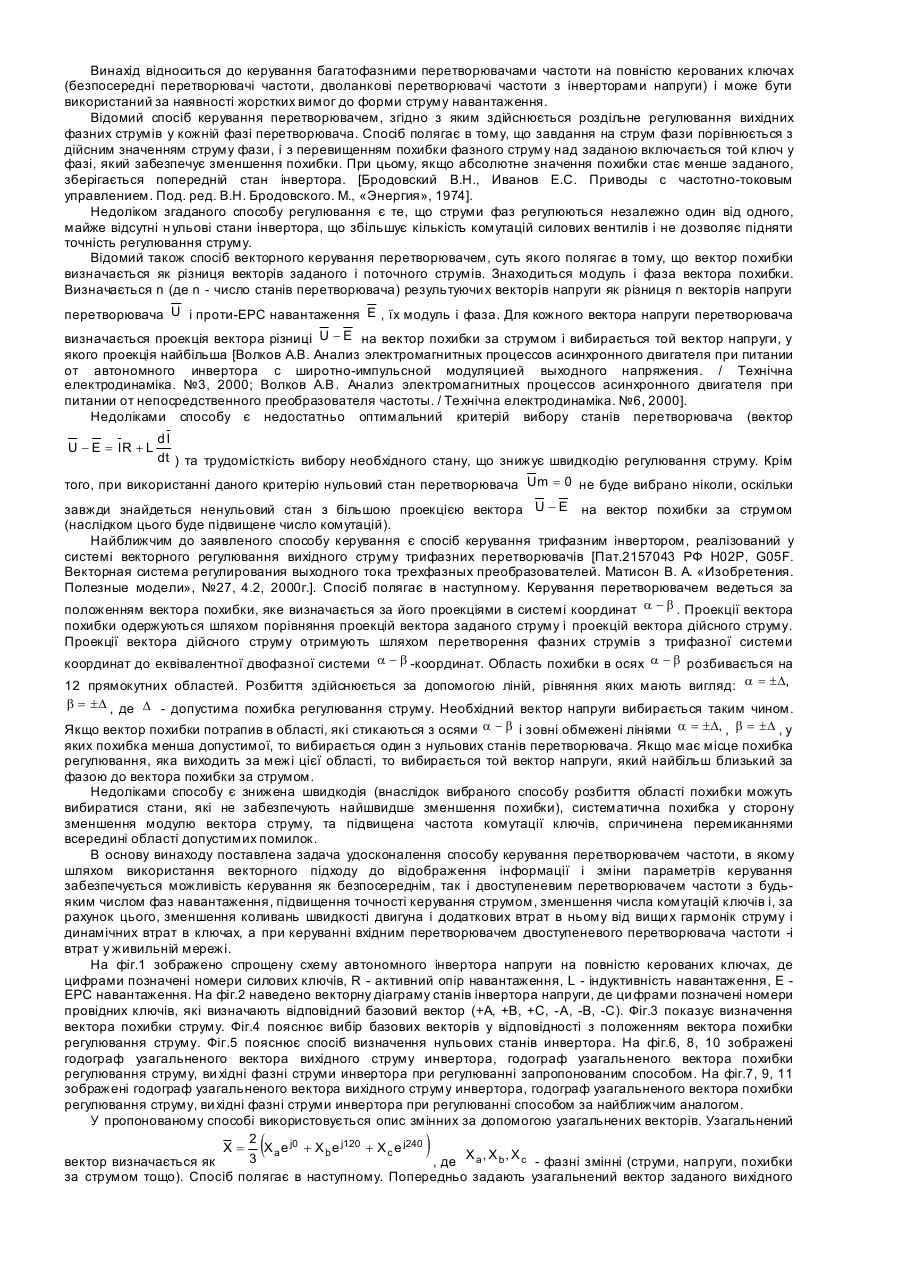
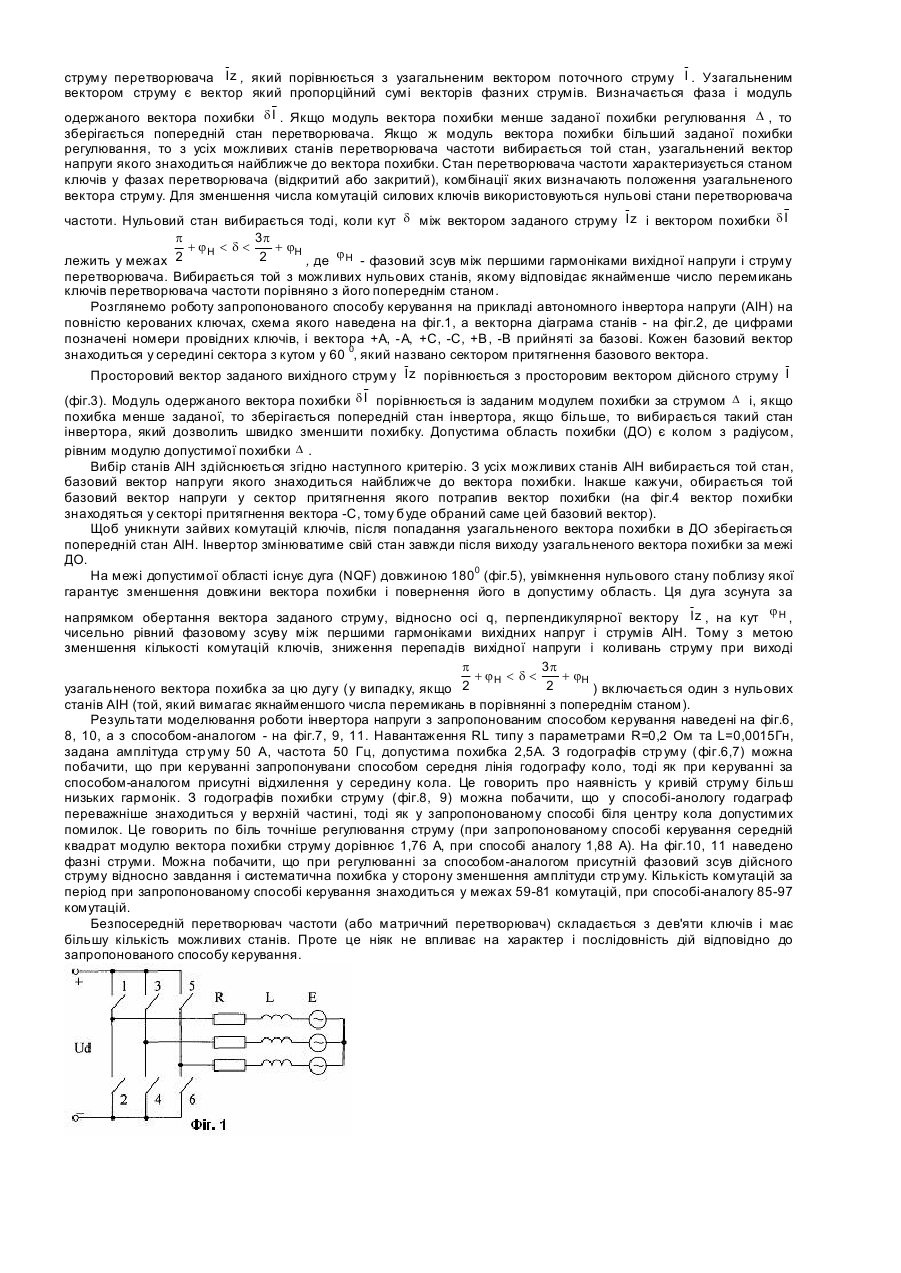
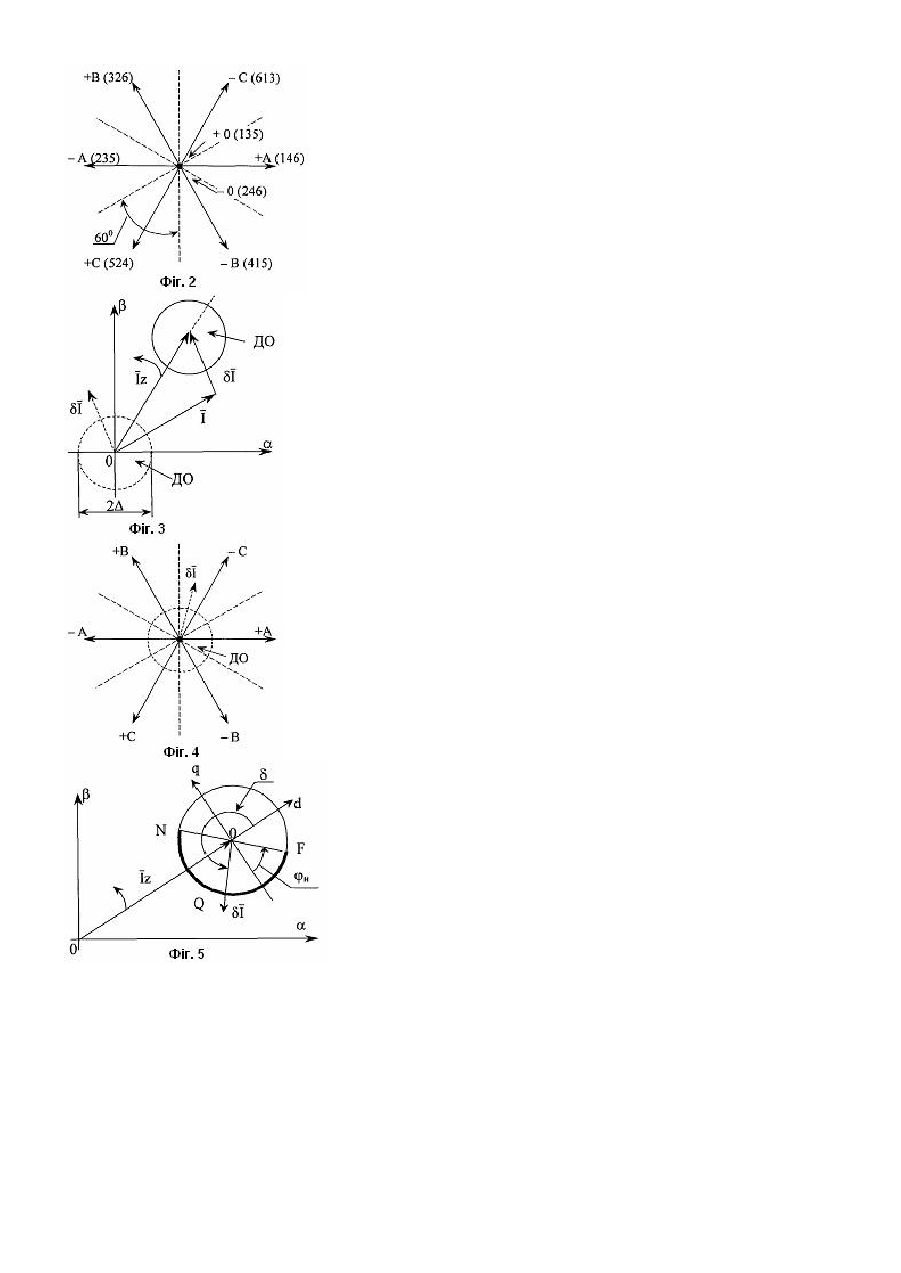
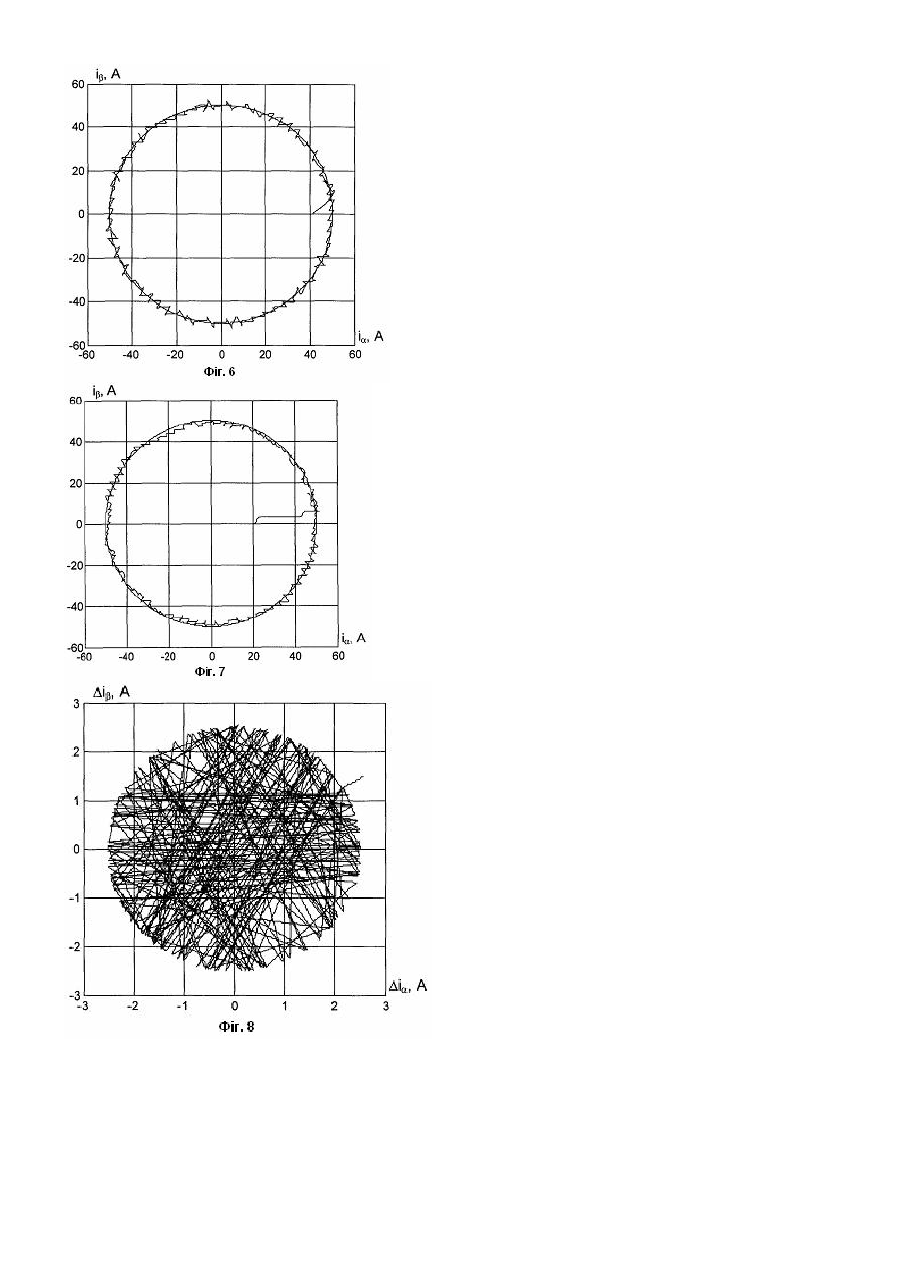
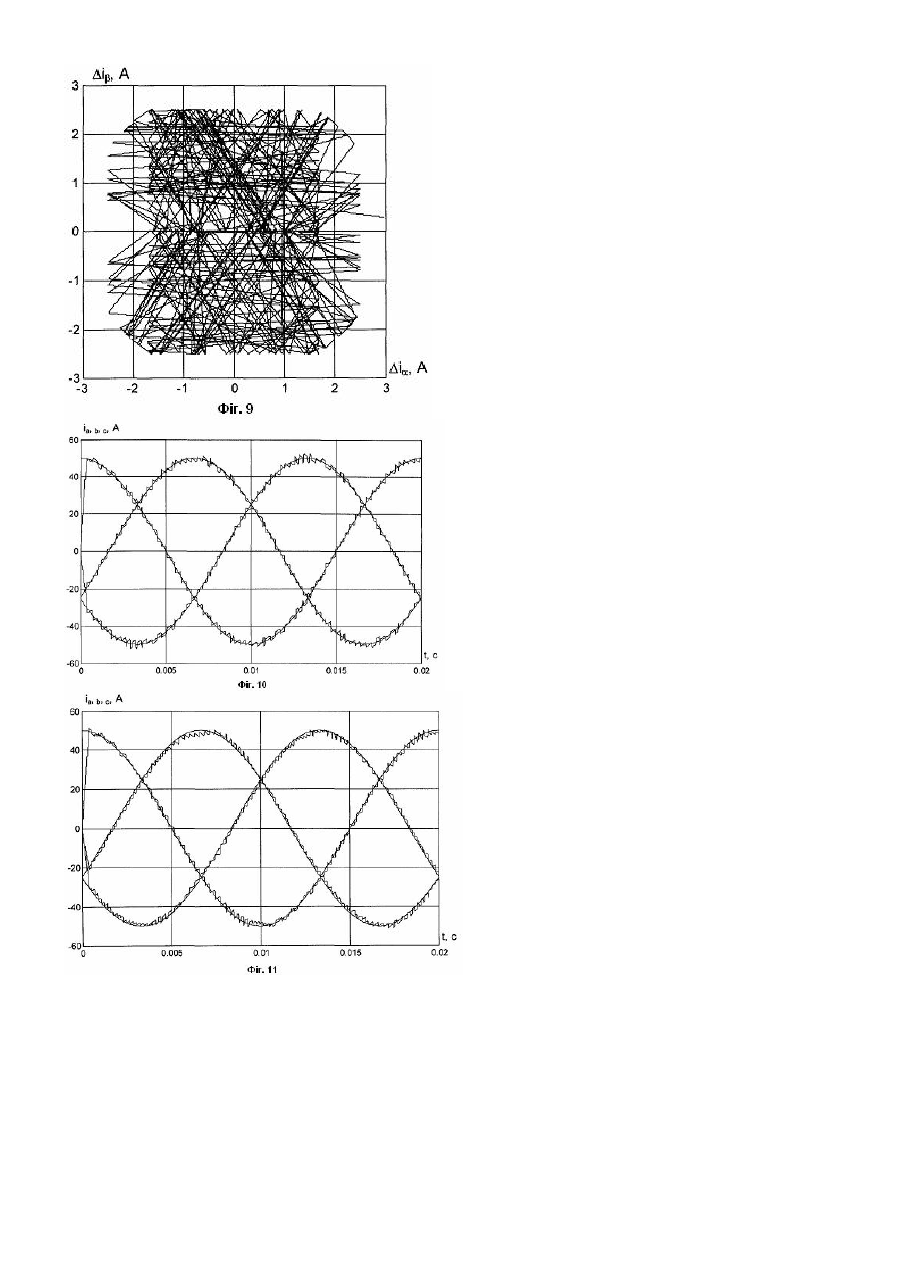
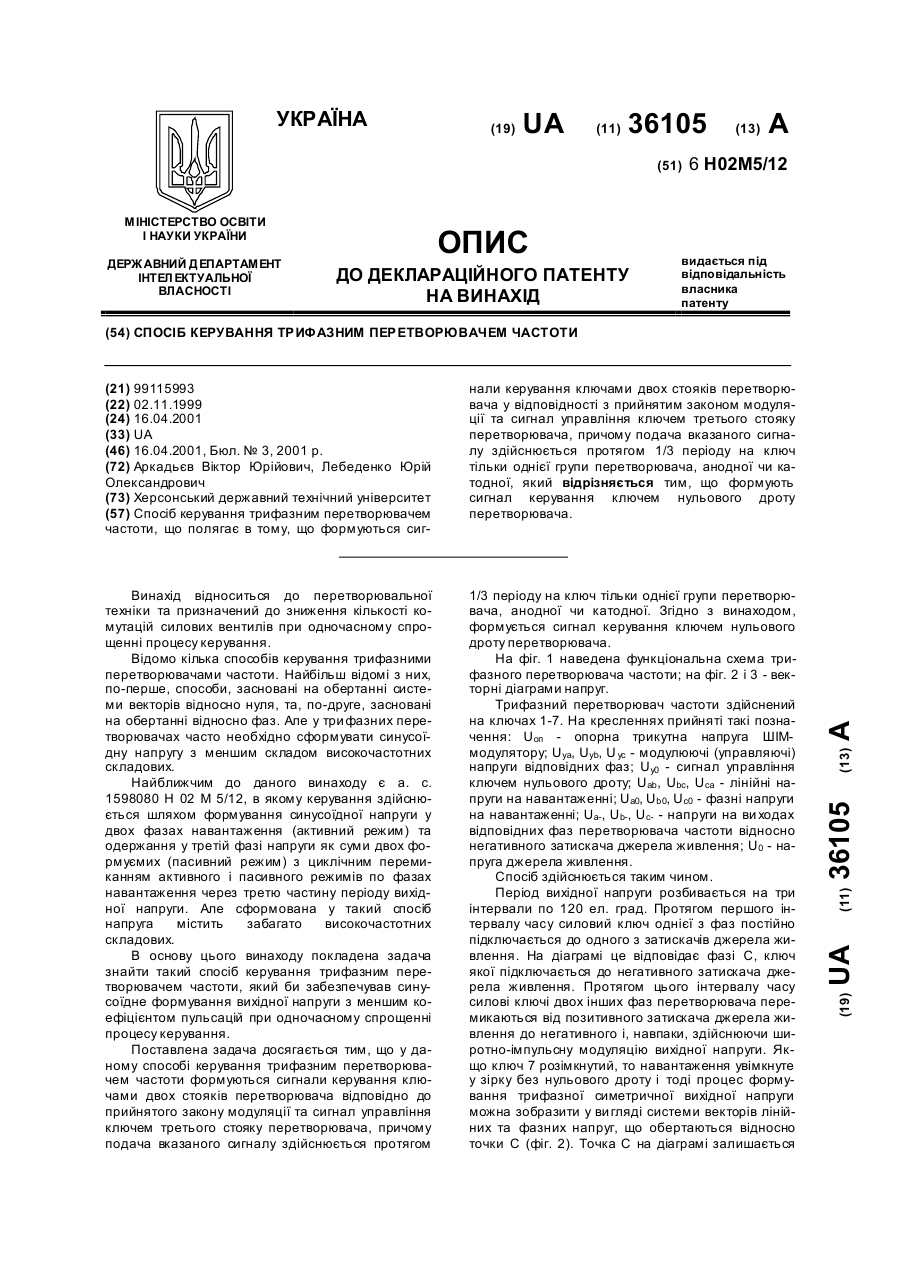
Винахід відноситься до керування багатофазними перетворювачами частоти на повністю керованих ключах (безпосередні перетворювачі частоти, дволанкові перетворювачі частоти з інверторами напруги) і може бути використаний за наявності жорстких вимог до форми струму навантаження. Відомий спосіб керування перетворювачем, згідно з яким здійснюється роздільне регулювання вихідних фазних струмів у кожній фазі перетворювача. Спосіб полягає в тому, що завдання на струм фази порівнюється з дійсним значенням струму фази, і з перевищенням похибки фазного струму над заданою включається той ключ у фазі, який забезпечує зменшення похибки. При цьому, якщо абсолютне значення похибки стає менше заданого, зберігається попередній стан інвертора. [Бродовский В.Н., Иванов Е.С. Приводы с частотно-токовым управлением. Под. ред. В.Н. Бродовского. М., «Энергия», 1974]. Недоліком згаданого способу регулювання є те, що струми фаз регулюються незалежно один від одного, майже відсутні н ульові стани інвертора, що збільшує кількість комутацій силових вентилів і не дозволяє підняти точність регулювання струму. Відомий також спосіб векторного керування перетворювачем, суть якого полягає в тому, що вектор похибки визначається як різниця векторів заданого і поточного струмів. Знаходиться модуль і фаза вектора похибки. Визначається n (де n - число станів перетворювача) результуючи х векторів напруги як різниця n векторів напруги перетворювача U і проти-ЕРС навантаження E , їх модуль і фаза. Для кожного вектора напруги перетворювача визначається проекція вектора різниці U - E на вектор похибки за струмом і вибирається той вектор напруги, у якого проекція найбільша [Волков А.В. Анализ электромагнитных процессов асинхронного двигателя при питании от автономного инвертора с широтно-импульсной модуляцией выходного напряжения. / Технічна електродинаміка. №3, 2000; Волков А.В. Анализ электромагнитных процессов асинхронного двигателя при питании от непосредственного преобразователя частоты. / Те хнічна електродинаміка. №6, 2000]. Недоліками способу є недостатньо оптимальний критерій вибору станів перетворювача (вектор dI dt ) та трудомісткість вибору необхідного стану, що знижує швидкодію регулювання струму. Крім того, при використанні даного критерію нульовий стан перетворювача Um = 0 не буде вибрано ніколи, оскільки U - E = IR + L завжди знайдеться ненульовий стан з більшою проекцією вектора U - E на вектор похибки за струмом (наслідком цього буде підвищене число комутацій). Найближчим до заявленого способу керування є спосіб керування трифазним інвертором, реалізований у системі векторного регулювання вихідного струму трифазних перетворювачів [Пат.2157043 РФ Н02Р, G05F. Векторная система регулирования выходного тока трехфазных преобразователей. Матисон В. А. «Изобретения. Полезные модели», №27, 4.2, 2000г.]. Спосіб полягає в наступному. Керування перетворювачем ведеться за положенням вектора похибки, яке визначається за його проекціями в системі координат a - b . Проекції вектора похибки одержуються шляхом порівняння проекцій вектора заданого струму і проекцій вектора дійсного струму. Проекції вектора дійсного струму отримують шляхом перетворення фазних струмів з трифазної системи координат до еквівалентної двофазної системи a - b -координат. Область похибки в осях a - b розбивається на 12 прямокутних областей. Розбиття здійснюється за допомогою ліній, рівняння яких мають вигляд: a = ± D, b = ± D , де D - допустима похибка регулювання струму. Необхідний вектор напруги вибирається таким чином. Якщо вектор похибки потрапив в області, які стикаються з осями a - b і зовні обмежені лініями a = ± D, , b = ± D , у яких похибка менша допустимої, то вибирається один з нульових станів перетворювача. Якщо має місце похибка регулювання, яка виходить за межі цієї області, то вибирається той вектор напруги, який найбільш близький за фазою до вектора похибки за струмом. Недоліками способу є знижена швидкодія (внаслідок вибраного способу розбиття області похибки можуть вибиратися стани, які не забезпечують найшвидше зменшення похибки), систематична похибка у сторону зменшення модулю вектора струму, та підвищена частота комутації ключів, спричинена перемиканнями всередині області допустимих помилок. В основу винаходу поставлена задача удосконалення способу керування перетворювачем частоти, в якому шляхом використання векторного підходу до відображення інформації і зміни параметрів керування забезпечується можливість керування як безпосереднім, так і двоступеневим перетворювачем частоти з будьяким числом фаз навантаження, підвищення точності керування струмом, зменшення числа комутацій ключів і, за рахунок цього, зменшення коливань швидкості двигуна і додаткових втрат в ньому від вищи х гармонік струму і динамічних втрат в ключах, а при керуванні вхідним перетворювачем двоступеневого перетворювача частоти -і втрат у живильній мережі. На фіг.1 зображено спрощену схему автономного інвертора напруги на повністю керованих ключах, де цифрами позначені номери силових ключів, R - активний опір навантаження, L - індуктивність навантаження, Е ЕРС навантаження. На фіг.2 наведено векторну діаграму станів інвертора напруги, де ци фрами позначені номери провідних ключів, які визначають відповідний базовий вектор (+А, +В, +С, -А, -В, -С). Фіг.3 показує визначення вектора похибки струму. Фіг.4 пояснює вибір базових векторів у відповідності з положенням вектора похибки регулювання струму. Фіг.5 пояснює спосіб визначення нульових станів инвертора. На фіг.6, 8, 10 зображені годограф узагальненого вектора вихідного струму инвертора, годограф узагальненого вектора похибки регулювання струму, ви хідні фазні струми инвертора при регулюванні запропонованим способом. На фіг.7, 9, 11 зображені годограф узагальненого вектора вихідного струму инвертора, годограф узагальненого вектора похибки регулювання струму, ви хідні фазні струми инвертора при регулюванні способом за найближчим аналогом. У пропонованому способі використовується опис змінних за допомогою узагальнених векторів. Узагальнений 2 X = X a e j0 + X b e j120 + X c e j240 3 вектор визначається як , де X a , X b , X c - фазні змінні (струми, напруги, похибки за струмом тощо). Спосіб полягає в наступному. Попередньо задають узагальнений вектор заданого вихідного ( ) струму перетворювача I z , який порівнюється з узагальненим вектором поточного струму I . Узагальненим вектором струму є вектор який пропорційний сумі векторів фазних струмів. Визначається фаза і модуль одержаного вектора похибки d I . Якщо модуль вектора похибки менше заданої похибки регулювання D , то зберігається попередній стан перетворювача. Якщо ж модуль вектора похибки більший заданої похибки регулювання, то з усіх можливих станів перетворювача частоти вибирається той стан, узагальнений вектор напруги якого знаходиться найближче до вектора похибки. Стан перетворювача частоти характеризується станом ключів у фазах перетворювача (відкритий або закритий), комбінації яких визначають положення узагальненого вектора струму. Для зменшення числа комутацій силових ключів використовуються нульові стани перетворювача частоти. Нульовий стан вибирається тоді, коли кут d між вектором заданого струму I z і вектором похибки d I p 3p + jH < d < + jH 2 лежить у межах 2 , де j H - фазовий зсув між першими гармоніками вихідної напруги і струму перетворювача. Вибирається той з можливих нульових станів, якому відповідає якнайменше число перемикань ключів перетворювача частоти порівняно з його попереднім станом. Розглянемо роботу запропонованого способу керування на прикладі автономного інвертора напруги (АІН) на повністю керованих ключах, схема якого наведена на фіг.1, а векторна діаграма станів - на фіг.2, де цифрами позначені номери провідних ключів, і вектора +А, -А, +С, -С, +В, -В прийняті за базові. Кожен базовий вектор знаходиться у середині сектора з кутом у 60 0, який названо сектором притягнення базового вектора. Просторовий вектор заданого вихідного струм у I z порівнюється з просторовим вектором дійсного струму I (фіг.3). Модуль одержаного вектора похибки d I порівнюється із заданим модулем похибки за струмом D і, якщо похибка менше заданої, то зберігається попередній стан інвертора, якщо більше, то вибирається такий стан інвертора, який дозволить швидко зменшити похибку. Допустима область похибки (ДО) є колом з радіусом, рівним модулю допустимої похибки D . Вибір станів АІН здійснюється згідно наступного критерію. З усіх можливих станів АІН вибирається той стан, базовий вектор напруги якого знаходиться найближче до вектора похибки. Інакше кажучи, обирається той базовий вектор напруги у сектор притягнення якого потрапив вектор похибки (на фіг.4 вектор похибки знаходяться у секторі притягнення вектора -С, тому буде обраний саме цей базовий вектор). Щоб уникнути зайвих комутацій ключів, після попадання узагальненого вектора похибки в ДО зберігається попередній стан АІН. Інвертор змінюватиме свій стан завжди після виходу узагальненого вектора похибки за межі ДО. На межі допустимої області існує дуга (NQF) довжиною 1800 (фіг.5), увімкнення нульового стану поблизу якої гарантує зменшення довжини вектора похибки і повернення його в допустиму область. Ця дуга зсунута за напрямком обертання вектора заданого струму, відносно осі q, перпендикулярної вектору I z , на кут j H , чисельно рівний фазовому зсуву між першими гармоніками вихідних напруг і струмів АІН. Тому з метою зменшення кількості комутацій ключів, зниження перепадів вихідної напруги і коливань струму при виході p 3p + jH < d < + jH 2 узагальненого вектора похибка за цю дугу (у випадку, якщо 2 ) включається один з нульових станів АІН (той, який вимагає якнайменшого числа перемикань в порівнянні з попереднім станом). Результати моделювання роботи інвертора напруги з запропонованим способом керування наведені на фіг.6, 8, 10, а з способом-аналогом - на фіг.7, 9, 11. Навантаження RL типу з параметрами R=0,2 Ом та L=0,0015Гн, задана амплітуда стр уму 50 А, частота 50 Гц, допустима похибка 2,5А. З годографів стр уму (фіг.6,7) можна побачити, що при керуванні запропонувани способом середня лінія годографу коло, тоді як при керуванні за способом-аналогом присутні відхилення у середину кола. Це говорить про наявність у кривій струму більш низьких гармонік. З годографів похибки струму (фіг.8, 9) можна побачити, що у способі-анологу годаграф переважніше знаходиться у верхній частині, тоді як у запропонованому способі біля центру кола допустимих помилок. Це говорить по біль точніше регулювання струму (при запропонованому способі керування середній квадрат модулю вектора похибки струму дорівнює 1,76 А, при способі аналогу 1,88 А). На фіг.10, 11 наведено фазні струми. Можна побачити, що при регулюванні за способом-аналогом присутній фазовий зсув дійсного струму відносно завдання і систематична похибка у сторону зменшення амплітуди стр уму. Кількість комутацій за період при запропонованому способі керування знаходиться у межах 59-81 комутацій, при способі-аналогу 85-97 комутацій. Безпосередній перетворювач частоти (або матричний перетворювач) складається з дев'яти ключів і має більшу кількість можливих станів. Проте це ніяк не впливає на характер і послідовність дій відповідно до запропонованого способу керування.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of controlling a frequency converter
Назва патенту російськоюСпособ управления преобразователем частоты
МПК / Мітки
МПК: G05F 1/00, H02M 7/00, H02M 5/00
Мітки: перетворювачем, керування, спосіб, частоти
Код посилання
<a href="https://ua.patents.su/5-65329-sposib-keruvannya-peretvoryuvachem-chastoti.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування перетворювачем частоти</a>
Спосіб керування трифазним перетворювачем частоти
Номер патенту: 36105
Опубліковано: 16.04.2001
Автори: Аркадьєв Віктор Юрійович, Лебеденко Юрій Олександрович
МПК: H02M 5/02
Мітки: керування, спосіб, трифазним, перетворювачем, частоти
Текст:
...формування лінійних та фазних напруг на навантаженні здійснюється так само, як описано вище, та підпорядковуються співвідношенням U bc - U ab 3 Uc0=Ubc+Ub0 Ua0=-Uab+Ub0 Для цього інтервалу необхідно урахувати, що Ubc=Uc-, Uab=-U aТоді фазні напруги визначаються як U + Ua Ub 0 = - c 3 Uc0=Uc-+Ub0 Ua0=-Ua-+Ub Коли ключ 7 замкнутий, фазні напруги визначаються як Ubo=-U0/2 Uc0=Uc-/2 Ua0=Ua-/2 Процес формування вихідних напруг в цьому випадку...
Пристрій комбінованого керування перетворювачем частоти

Номер патенту: 48957
Опубліковано: 16.09.2002
Автори: Савельєв Юрій Юхимович, Клюк Богдан Олексійович, Підлісний Анатолій Михайлович, Ленська Олена Олександрівна, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ
МПК: H02P 9/00
Мітки: комбінованого, керування, пристрій, перетворювачем, частоти
Формула / Реферат:
Пристрій комбінованого керування перетворювачем частоти, який містить два жорстко зв'язаних m- фазних генератори, обмотки збудження яких виконано у вигляді m- фазних обмоток, підключених послідовно та із зворотним порядком чергування фаз по відношенню одна до одної до m- фазного малопотужного джерела стабільної частоти, початки m- фазної обертової якірної обмотки першого генератора об‘єднані .на обертовому якорі другого генератора розташовані...
Спосіб комбінованого керування тиристорним перетворювачем частоти
Номер патенту: 22064
Опубліковано: 16.09.2002
Автори: Підлісний Анатолій Михайлович, Ленська Олена Олександрівна, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ, Клюк Богдан Олексійович
МПК: H02M 5/02
Мітки: спосіб, частоти, тиристорним, комбінованого, перетворювачем, керування
Формула / Реферат:
Способ комбинированного управления тиристорным преобразователем частоты с двумя группами встречно-параллельно включенных тиристоров, питающихся от m-фазной сети с источником биения напряжений, заключающийся в том, что выделяют из напряжения питающей сети напряжение несущей частоты биений, формируют синфазно несущей частоте импульсы синхронизации, задают сигналы управления тиристорами преобразователя частоты, формируют и подают на группы...
Спосіб керування трифазним безпосереднім перетворювачем частоти
Номер патенту: 3025
Опубліковано: 26.12.1994
Автори: Маш'янов Володимир Гаврилович, Нехамін Сергій Маркович, Фоменко Володимир Васильович
МПК: H02M 5/02
Мітки: спосіб, перетворювачем, безпосереднім, трифазним, частоти, керування
Формула / Реферат:
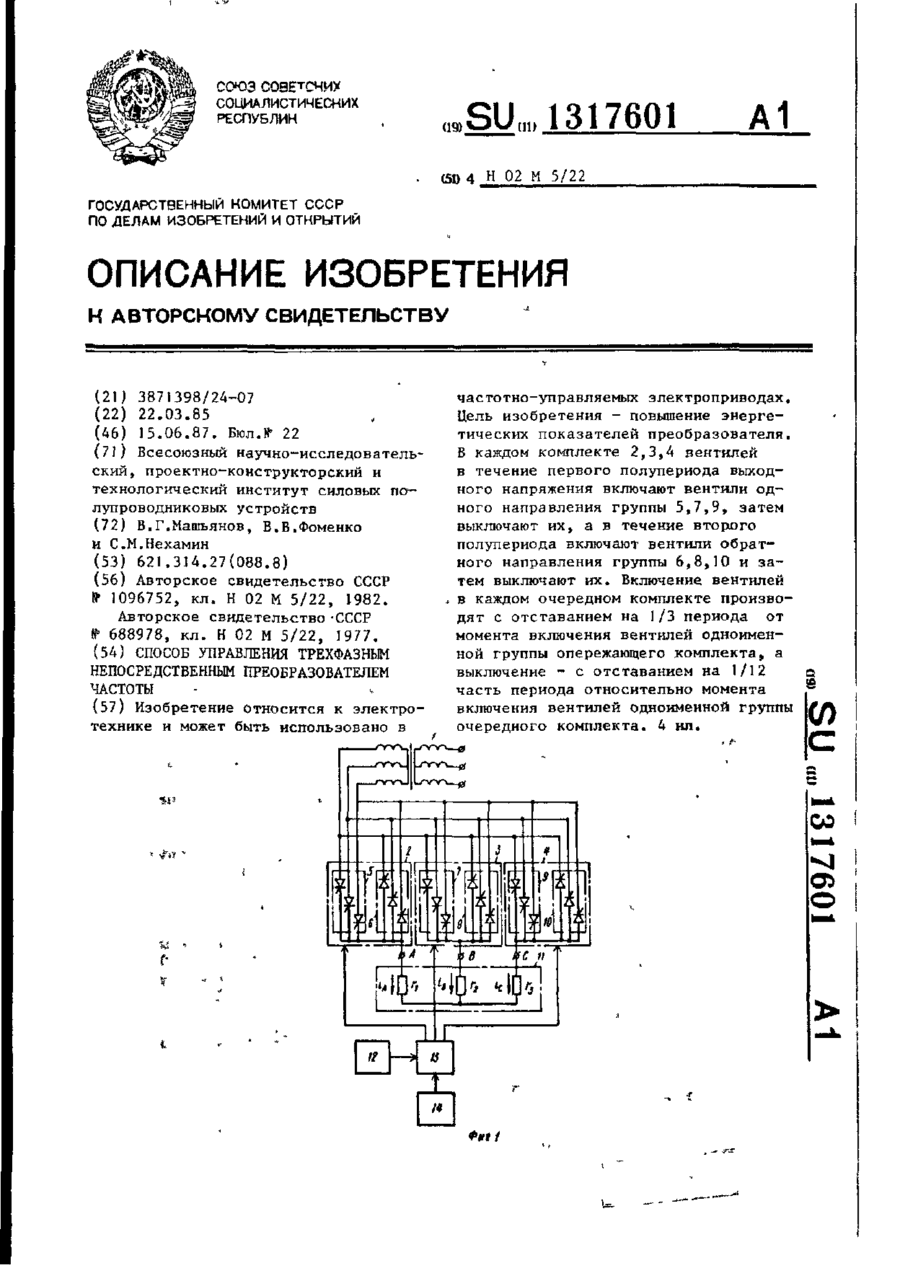
Способ управления трехфазным непосредственным преобразователем частоты, содержащим три фазных комплекта вентилей, каждый из которых выполнен в виде двух групп, включенных по встречно-параллельной нулевой схеме, заключающийся в том, что задают частоту выходного напряжения в каждом фазном комплекте, в течение первого полупериода выходного напряжения включают и выключают вентили первой группы, а в течение второго полупериода включают и...
Спосіб керування трифазним безпосереднім перетворювачем частоти
Номер патенту: 8817
Опубліковано: 30.09.1996
Автори: Маш'янов Володимир Гаврилович, Моргульов Сергій Андрійович
МПК: H02M 5/02
Мітки: безпосереднім, спосіб, трифазним, керування, перетворювачем, частоти
Формула / Реферат:
Способ управления трехфазным непосредственным преобразователем частоты для питания промышленных электропечей, включающим три вентильных комплекта, состоящих каждый из первой и второй вентильных групп, заключающийся в том, что формируют и подают на управляющие входы вентилей комплектов последовательность импульсов отпирания с заданной частотой, более низкой, чем частота питающей сети, на вентили каждого комплекта в течение первого...
Попередній патент: Спосіб діагностики алергії до білків курячого яйця у дітей, хворих на бронхіальну астму
Наступний патент: Спосіб оцінки ефективності комплексного лікування раку яєчників
Випадковий патент: Спосіб виробництва харчового рибного фаршу