Спосіб ухилення космічного апарата від зіткнення з небезпечним космічним об’єктом і пристрій для його здійснення
Номер патенту: 72416
Опубліковано: 26.05.2008
Автори: Авдєєв Вольт Васильович, Курінний Валерій Валерійович, Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
1. Спосіб ухилення космічного апарата від зіткнення з небезпечним космічним об'єктом, що заснований на збільшенні відстані між цими тілами до безпечної величини, який відрізняється тим, що перед входом у зону невизначеності місцезнаходження космічного об'єкта космічний апарат розділяють на дві частини, з'єднують їх між собою нежорсткими зв'язками, наприклад тросами, розводять їх у протилежні боки один від одного і водночас випускають троси на довжину з можливістю проходження частин поза межами небезпечної зони, після чого довжини тросів зменшують до з'єднання частин у єдину вихідну конструкцію, при цьому небезпечну зону визначають об’єднанням зон невизначеності місцезнаходження об'єкта та апарата, наприклад, як геометричну суму середньоквадратичних відхилень характерних розмірів цих зон.
2. Спосіб за п. 1, який відрізняється тим, що космічний апарат розділяють на частини, які є близькими за масою.
3. Спосіб за пп. 1, 2, який відрізняється тим, що троси виводять за межі небезпечної зони, наприклад, за допомогою важелів.
4. Спосіб за пп. 1-3, який відрізняється тим, що частини космічного апарата розводять у площині, нормальній вектору відносної швидкості космічного апарата і небезпечного космічного об'єкта.
5. Спосіб за п. 4, який відрізняється тим, що частини космічного апарата розводять вздовж лінії перетину площини місцевого горизонту і площини, нормальної вектору відносної швидкості космічного апарата і небезпечного космічного об'єкта.
6. Спосіб за п. 4, який відрізняється тим, що частини космічного апарата розводять вздовж напрямку мінімального діаметра проекції небезпечної зони на площину, нормальну вектору відносної швидкості космічного апарата і небезпечного космічного об'єкта.
7. Пристрій для ухилення космічного апарата від зіткнення з небезпечним космічним об'єктом, що включає нежорсткі зв'язки, наприклад троси, зв’язані з подільними частинами космічного апарата, та пристрій для виведення зв'язків за межі апарата, який відрізняється тим, що космічний апарат виконаний з двох частин, з'єднаних між собою нежорсткими зв'язками, наприклад тросами, між частинами космічного апарата встановлені штовхачі, наприклад пружини, щонайменше на одній частині встановлена електролебідка, на якій навиті троси, причому їх довжини складають більше подвоєного значення максимального характерного розміру зони невизначеності місцезнаходження космічного об'єкта.
8. Пристрій за п. 7, який відрізняється тим, що троси укладені на важелях, наприклад висувних штангах, а довжина кожної штанги виконана більшою за максимальний характерний діаметр зони невизначеності місцезнаходження космічного об'єкта.
9. Пристрій за п. 7, який відрізняється тим, що нежорсткі зв'язки виконані з пружними властивостями.
Текст
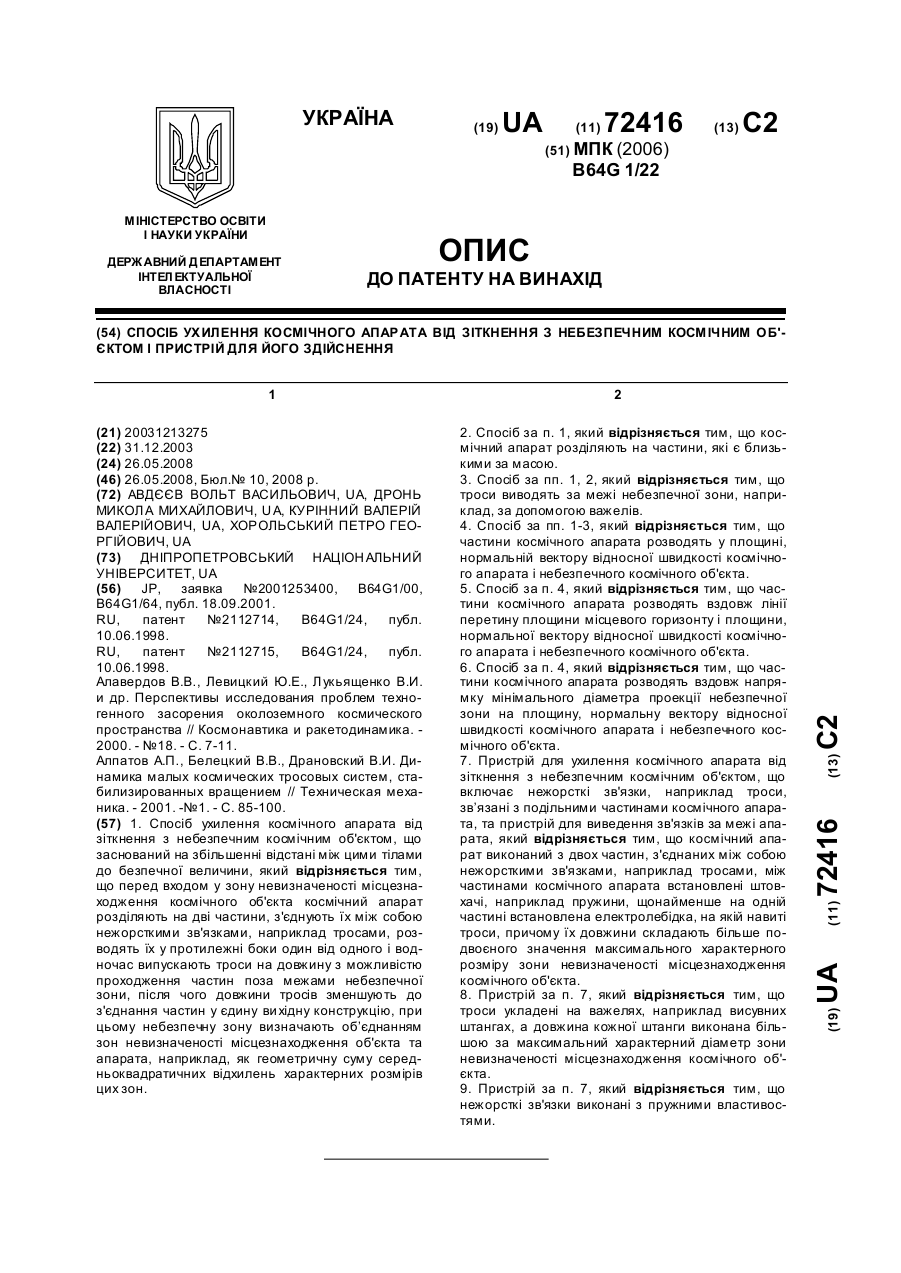
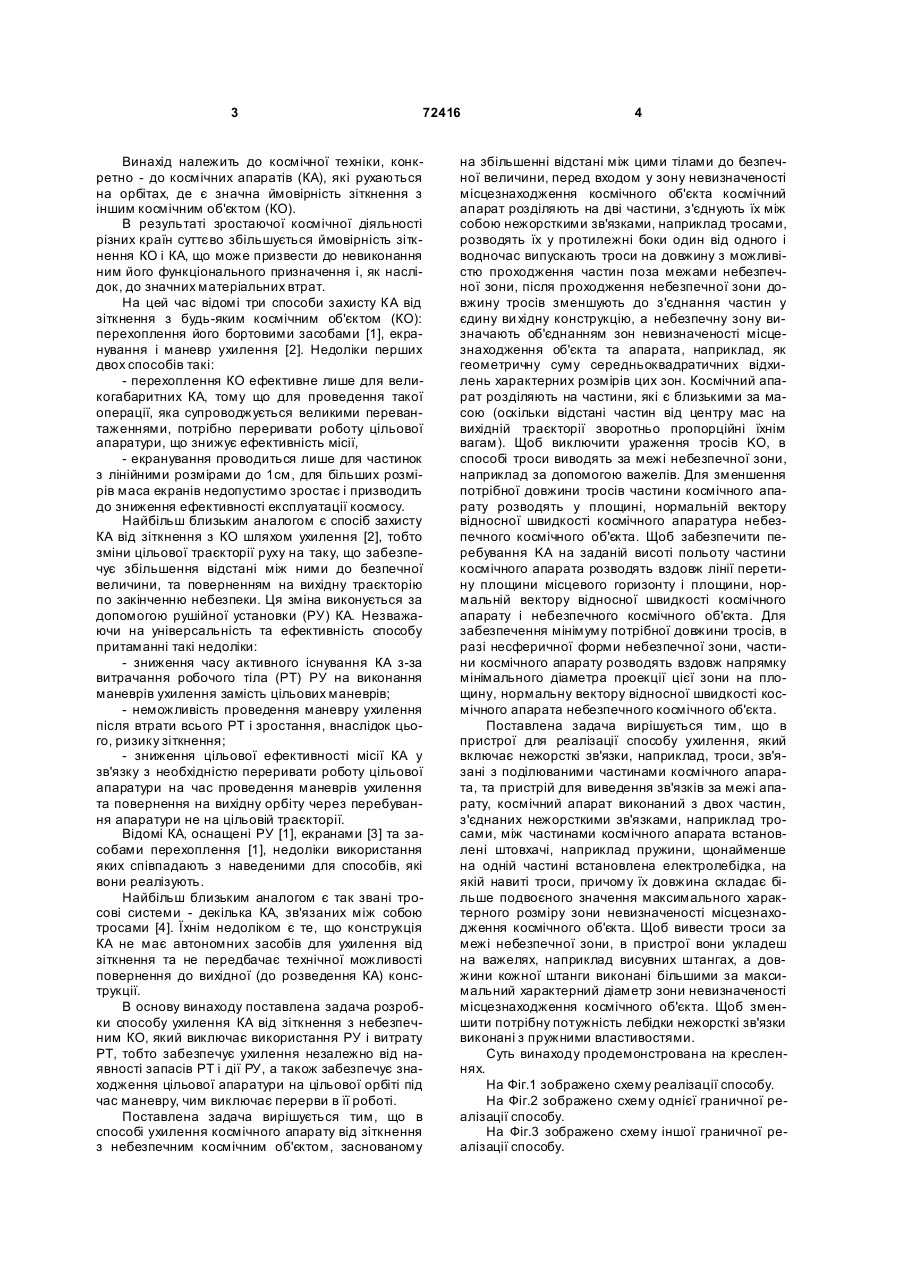
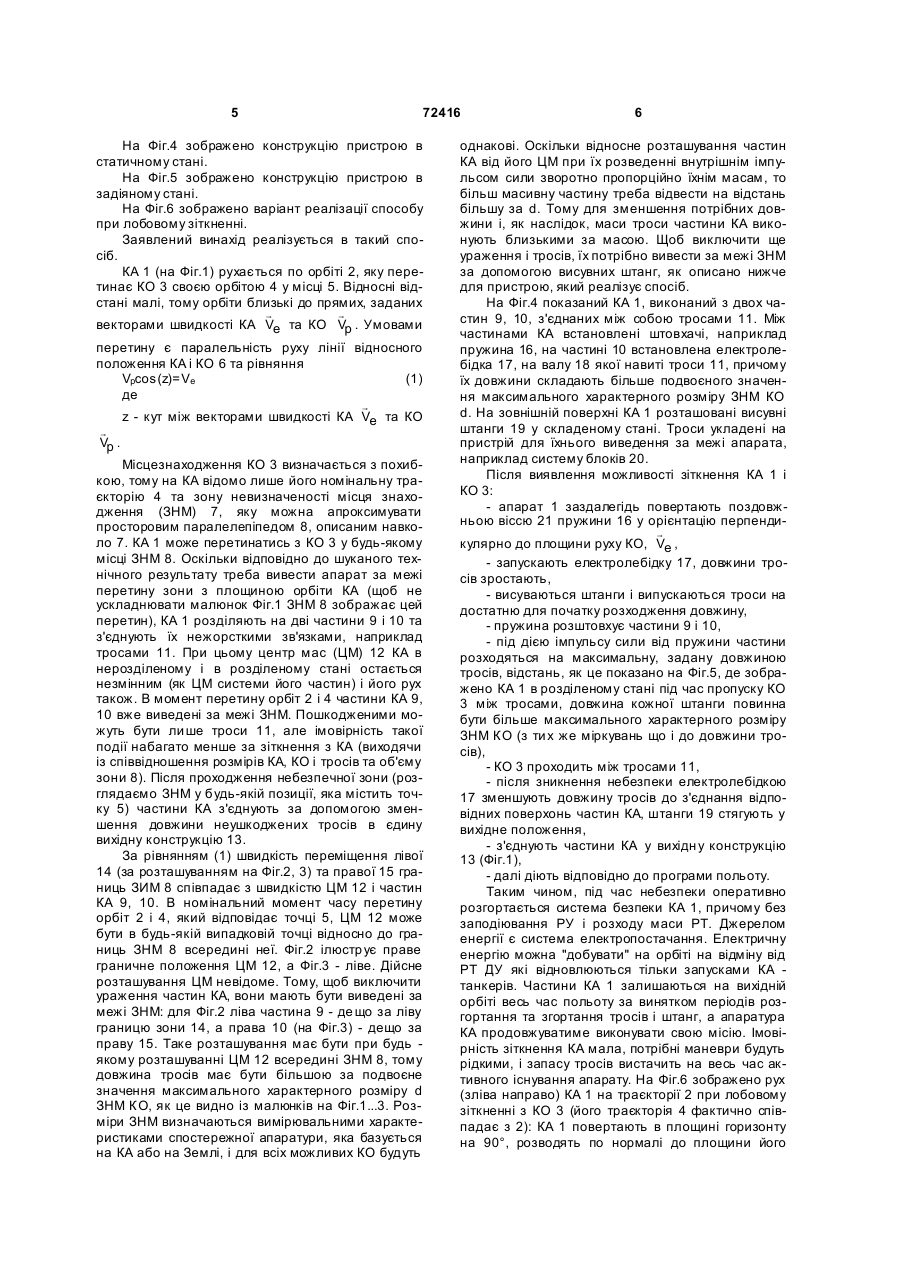
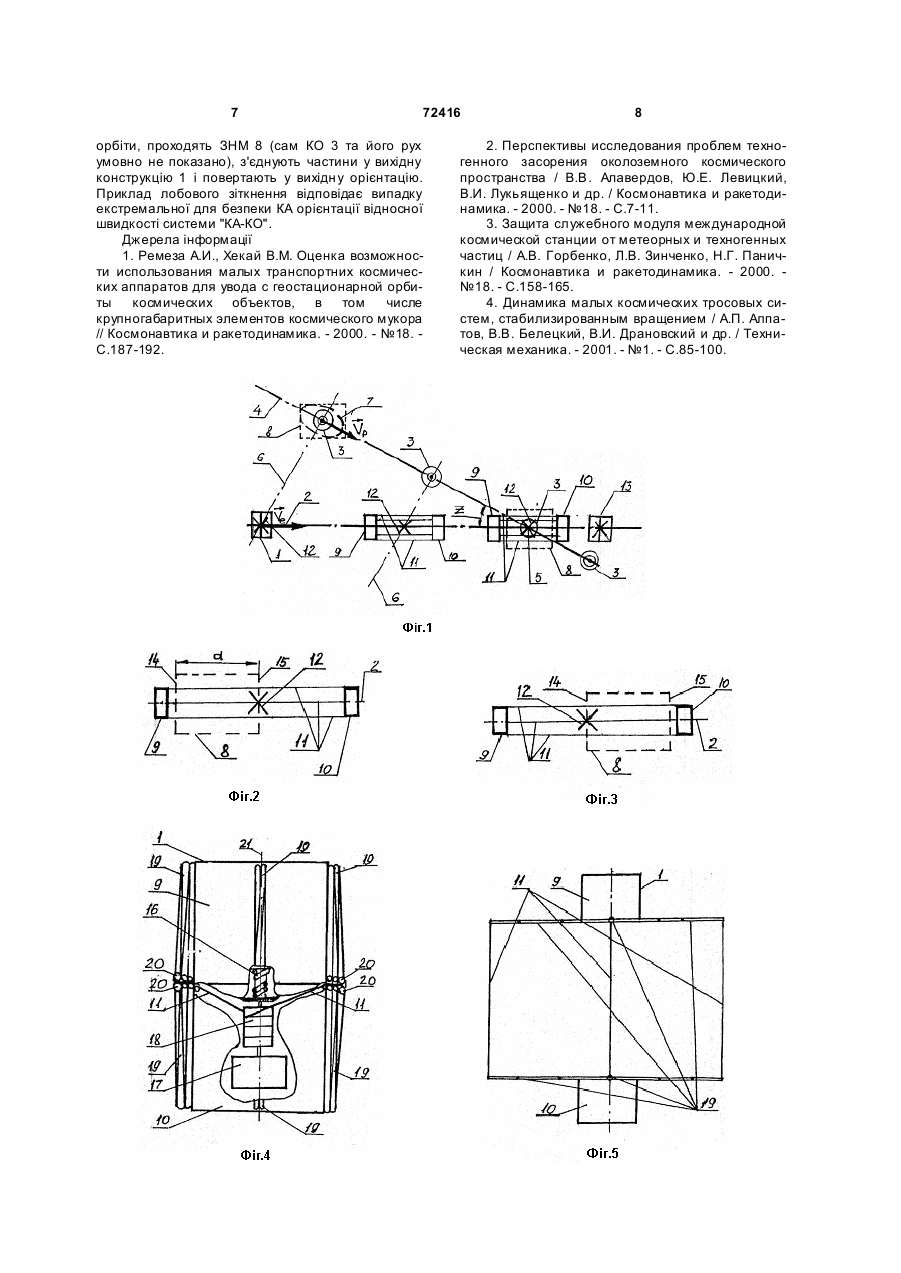
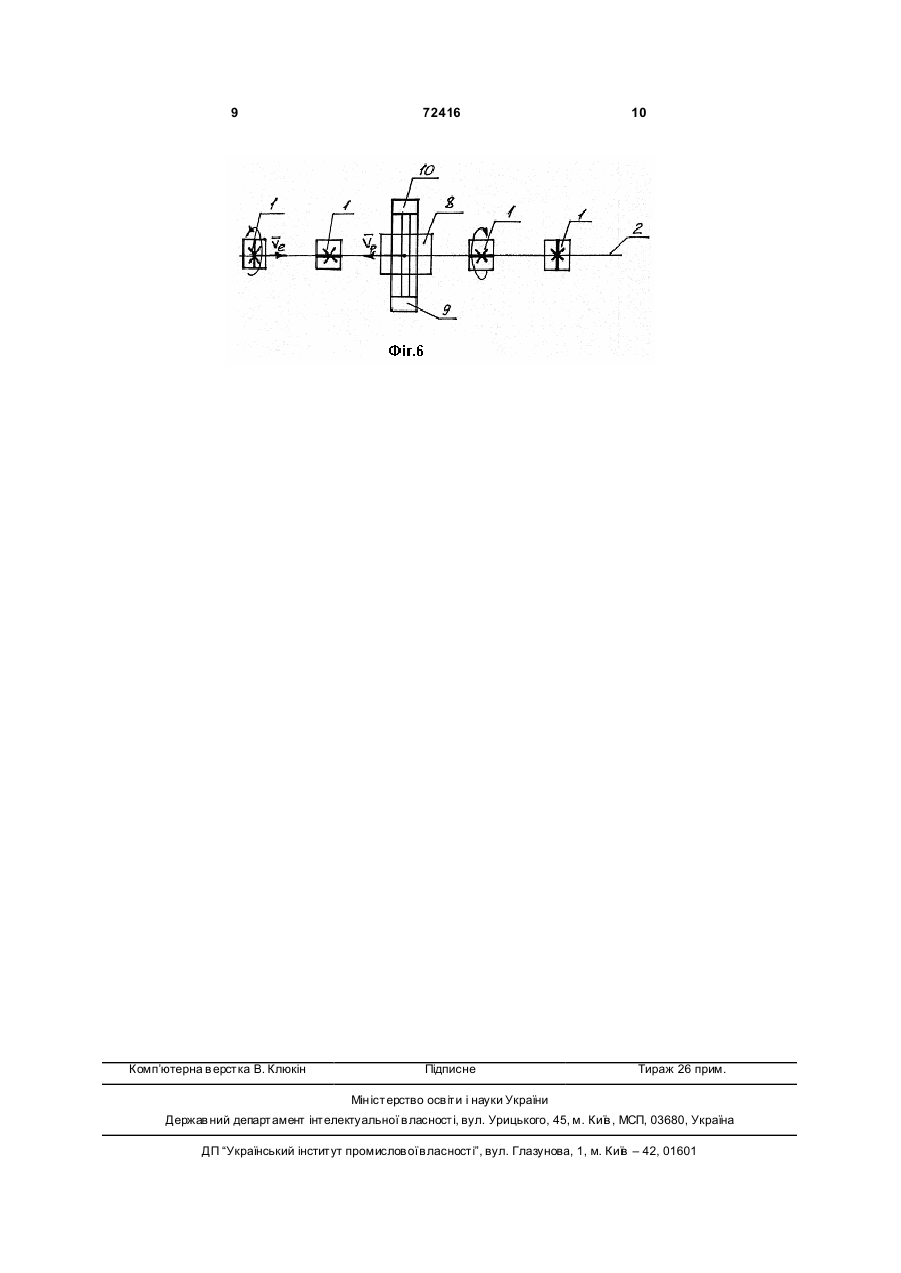
1. Спосіб ухилення космічного апарата від зіткнення з небезпечним космічним об'єктом, що заснований на збільшенні відстані між цими тілами до безпечної величини, який відрізняється тим, що перед входом у зону невизначеності місцезнаходження космічного об'єкта космічний апарат розділяють на дві частини, з'єднують їх між собою нежорсткими зв'язками, наприклад тросами, розводять їх у протилежні боки один від одного і водночас випускають троси на довжину з можливістю проходження частин поза межами небезпечної зони, після чого довжини тросів зменшують до з'єднання частин у єдину ви хідну конструкцію, при цьому небезпечну зону визначають об’єднанням зон невизначеності місцезнаходження об'єкта та апарата, наприклад, як геометричну суму середньоквадратичних відхилень характерних розмірів цих зон. 2 (19) 1 3 72416 Винахід належить до космічної техніки, конкретно - до космічних апаратів (КА), які рухаються на орбітах, де є значна ймовірність зіткнення з іншим космічним об'єктом (КО). В результаті зростаючої космічної діяльності різних країн суттєво збільшується ймовірність зіткнення КО і КА, що може призвести до невиконання ним його функціонального призначення і, як наслідок, до значних матеріальних втрат. На цей час відомі три способи захисту КА від зіткнення з будь-яким космічним об'єктом (КО): перехоплення його бортовими засобами [1], екранування і маневр ухилення [2]. Недоліки перших двох способів такі: - перехоплення КО ефективне лише для великогабаритних КА, тому що для проведення такої операції, яка супроводжується великими перевантаженнями, потрібно переривати роботу цільової апаратури, що знижує ефективність місії, - екранування проводиться лише для частинок з лінійними розмірами до 1см, для більших розмірів маса екранів недопустимо зростає і призводить до зниження ефективності експлуатації космосу. Найбільш близьким аналогом є спосіб захисту КА від зіткнення з КО шляхом ухилення [2], тобто зміни цільової траєкторії руху на таку, що забезпечує збільшення відстані між ними до безпечної величини, та поверненням на вихідну траєкторію по закінченню небезпеки. Ця зміна виконується за допомогою рушійної установки (РУ) КА. Незважаючи на універсальність та ефективність способу притаманні такі недоліки: - зниження часу активного існування КА з-за витрачання робочого тіла (РТ) РУ на виконання маневрів ухилення замість цільових маневрів; - неможливість проведення маневру ухилення після втрати всього РТ і зростання, внаслідок цього, ризику зіткнення; - зниження цільової ефективності місії КА у зв'язку з необхідністю переривати роботу цільової апаратури на час проведення маневрів ухилення та повернення на вихідну орбіту через перебування апаратури не на цільовій траєкторії. Відомі КА, оснащені РУ [1], екранами [3] та засобами перехоплення [1], недоліки використання яких співпадають з наведеними для способів, які вони реалізують. Найбільш близьким аналогом є так звані тросові системи - декілька КА, зв'язаних між собою тросами [4]. Їхнім недоліком є те, що конструкція КА не має автономних засобів для ухилення від зіткнення та не передбачає технічної можливості повернення до вихідної (до розведення КА) конструкції. В основу винаходу поставлена задача розробки способу ухилення КА від зіткнення з небезпечним КО, який виключає використання РУ і витрату РТ, тобто забезпечує ухилення незалежно від наявності запасів РТ і дії РУ, а також забезпечує знаходження цільової апаратури на цільової орбіті під час маневру, чим виключає перерви в її роботі. Поставлена задача вирішується тим, що в способі ухилення космічного апарату від зіткнення з небезпечним космічним об'єктом, заснованому 4 на збільшенні відстані між цими тілами до безпечної величини, перед входом у зону невизначеності місцезнаходження космічного об'єкта космічний апарат розділяють на дві частини, з'єднують їх між собою нежорсткими зв'язками, наприклад тросами, розводять їх у протилежні боки один від одного і водночас випускають троси на довжину з можливістю проходження частин поза межами небезпечної зони, після проходження небезпечної зони довжину тросів зменшують до з'єднання частин у єдину ви хідну конструкцію, а небезпечну зону визначають об'єднанням зон невизначеності місцезнаходження об'єкта та апарата, наприклад, як геометричну суму середньоквадратичних відхилень характерних розмірів цих зон. Космічний апарат розділяють на частини, які є близькими за масою (оскільки відстані частин від центру мас на вихідній траєкторії зворотньо пропорційні їхнім вагам). Щоб виключити ураження тросів KO, в способі троси виводять за межі небезпечної зони, наприклад за допомогою важелів. Для зменшення потрібної довжини тросів частини космічного апарату розводять у площині, нормальній вектору відносної швидкості космічного апаратура небезпечного космічного об'єкта. Щоб забезпечити перебування KA на заданій висоті польоту частини космічного апарата розводять вздовж лінії перетину площини місцевого горизонту і площини, нормальній вектору відносної швидкості космічного апарату і небезпечного космічного об'єкта. Для забезпечення мінімуму потрібної довжини тросів, в разі несферичної форми небезпечної зони, частини космічного апарату розводять вздовж напрямку мінімального діаметра проекції цієї зони на площину, нормальну вектору відносної швидкості космічного апарата небезпечного космічного об'єкта. Поставлена задача вирішується тим, що в пристрої для реалізації способу ухилення, який включає нежорсткі зв'язки, наприклад, троси, зв'язані з поділюваними частинами космічного апарата, та пристрій для виведення зв'язків за межі апарату, космічний апарат виконаний з двох частин, з'єднаних нежорсткими зв'язками, наприклад тросами, між частинами космічного апарата встановлені штовхачі, наприклад пружини, щонайменше на одній частині встановлена електролебідка, на якій навиті троси, причому їх довжина складає більше подвоєного значення максимального характерного розміру зони невизначеності місцезнаходження космічного об'єкта. Щоб вивести троси за межі небезпечної зони, в пристрої вони укладеш на важелях, наприклад висувних штангах, а довжини кожної штанги виконані більшими за максимальний характерний діаметр зони невизначеності місцезнаходження космічного об'єкта. Щоб зменшити потрібну потужність лебідки нежорсткі зв'язки виконані з пружними властивостями. Суть винаходу продемонстрована на кресленнях. На Фіг.1 зображено схему реалізації способу. На Фіг.2 зображено схему однієї граничної реалізації способу. На Фіг.3 зображено схему іншої граничної реалізації способу. 5 72416 На Фіг.4 зображено конструкцію пристрою в статичному стані. На Фіг.5 зображено конструкцію пристрою в задіяному стані. На Фіг.6 зображено варіант реалізації способу при лобовому зіткненні. Заявлений винахід реалізується в такий спосіб. КА 1 (на Фіг.1) рухається по орбіті 2, яку перетинає КО 3 своєю орбітою 4 у місці 5. Відносні відстані малі, тому орбіти близькі до прямих, заданих r r векторами швидкості КА Vе та КО Vр . Умовами перетину є паралельність руху лінії відносного положення КА і КО 6 та рівняння Vpcos(z)=Ve (1) де r z - кут між векторами швидкості КА Vе та КО r Vр . Місцезнаходження КО 3 визначається з похибкою, тому на КА відомо лише його номінальну траєкторію 4 та зону невизначеності місця знаходження (ЗНМ) 7, яку можна апроксимувати просторовим паралелепіпедом 8, описаним навколо 7. КА 1 може перетинатись з КО 3 у будь-якому місці ЗНМ 8. Оскільки відповідно до шуканого технічного результату треба вивести апарат за межі перетину зони з площиною орбіти КА (щоб не ускладнювати малюнок Фіг.1 ЗНМ 8 зображає цей перетин), КА 1 розділяють на дві частини 9 і 10 та з'єднують їх нежорсткими зв'язками, наприклад тросами 11. При цьому центр мас (ЦМ) 12 КА в нерозділеному і в розділеному стані остається незмінним (як ЦМ системи його частин) і його рух також. В момент перетину орбіт 2 і 4 частини КА 9, 10 вже виведені за межі ЗНМ. Пошкодженими можуть бути ли ше троси 11, але імовірність такої події набагато менше за зіткнення з КА (виходячи із співвідношення розмірів КА, КО і тросів та об'єму зони 8). Після проходження небезпечної зони (розглядаємо ЗНМ у будь-якій позиції, яка містить точку 5) частини КА з'єднують за допомогою зменшення довжини неушкоджених тросів в єдину вихідну конструкцію 13. За рівнянням (1) швидкість переміщення лівої 14 (за розташуванням на Фіг.2, 3) та правої 15 границь ЗИМ 8 співпадає з швидкістю ЦМ 12 і частин КА 9, 10. В номінальний момент часу перетину орбіт 2 і 4, який відповідає точці 5, ЦМ 12 може бути в будь-якій випадковій точці відносно до границь ЗНМ 8 всередині неї. Фіг.2 ілюстр ує праве граничне положення ЦМ 12, а Фіг.3 - ліве. Дійсне розташування ЦМ невідоме. Тому, щоб виключити ураження частин КА, вони мають бути виведені за межі ЗНМ: для Фіг.2 ліва частина 9 - де що за ліву границю зони 14, а права 10 (на Фіг.3) - дещо за праву 15. Таке розташування має бути при будь якому розташуванні ЦМ 12 всередині ЗНМ 8, тому довжина тросів має бути більшою за подвоєне значення максимального характерного розміру d ЗНМ КО, як це видно із малюнків на Фіг.1...3. Розміри ЗНМ визначаються вимірювальними характеристиками спостережної апаратури, яка базується на КА або на Землі, і для всіх можливих КО будуть 6 однакові. Оскільки відносне розташування частин КА від його ЦМ при їх розведенні внутрішнім імпульсом сили зворотно пропорційно їхнім масам, то більш масивну частину треба відвести на відстань більшу за d. Тому для зменшення потрібних довжини і, як наслідок, маси троси частини КА виконують близькими за масою. Щоб виключити ще ураження і тросів, їх потрібно вивести за межі ЗНМ за допомогою висувних штанг, як описано нижче для пристрою, який реалізує спосіб. На Фіг.4 показаний КА 1, виконаний з двох частин 9, 10, з'єднаних між собою тросами 11. Між частинами КА встановлені штовхачі, наприклад пружина 16, на частині 10 встановлена електролебідка 17, на валу 18 якої навиті троси 11, причому їх довжини складають більше подвоєного значення максимального характерного розміру ЗНМ КО d. На зовнішній поверхні КА 1 розташовані висувні штанги 19 у складеному стані. Троси укладені на пристрій для їхнього виведення за межі апарата, наприклад систему блоків 20. Після виявлення можливості зіткнення КА 1 і КО 3: - апарат 1 заздалегідь повертають поздовжньою віссю 21 пружини 16 у орієнтацію перпендиr кулярно до площини руху КО, Vе , - запускають електролебідку 17, довжини тросів зростають, - висуваються штанги і випускаються троси на достатню для початку розходження довжину, - пружина розштовхує частини 9 і 10, - під дією імпульсу сили від пружини частини розходяться на максимальну, задану довжиною тросів, відстань, як це показано на Фіг.5, де зображено КА 1 в розділеному стані під час пропуску КО 3 між тросами, довжина кожної штанги повинна бути більше максимального характерного розміру ЗНМ КО (з ти х же міркувань що і до довжини тросів), - КО 3 проходить між тросами 11, - після зникнення небезпеки електролебідкою 17 зменшують довжину тросів до з'єднання відповідних поверхонь частин КА, штанги 19 стягують у вихідне положення, - з'єднують частини КА у вихідн у конструкцію 13 (Фіг.1), - далі діють відповідно до програми польоту. Таким чином, під час небезпеки оперативно розгортається система безпеки КА 1, причому без заподіювання РУ і розходу маси РТ. Джерелом енергії є система електропостачання. Електричну енергію можна "добувати" на орбіті на відміну від РТ ДУ які відновлюються тільки запусками КА танкерів. Частини КА 1 залишаються на вихідній орбіті весь час польоту за винятком періодів розгортання та згортання тросів і штанг, а апаратура КА продовжуватиме виконувати свою місію. Імовірність зіткнення КА мала, потрібні маневри будуть рідкими, і запасу тросів вистачить на весь час активного існування апарату. На Фіг.6 зображено рух (зліва направо) КА 1 на траєкторії 2 при лобовому зіткненні з КО 3 (його траєкторія 4 фактично співпадає з 2): КА 1 повертають в площині горизонту на 90°, розводять по нормалі до площини його 7 72416 орбіти, проходять ЗНМ 8 (сам КО 3 та його рух умовно не показано), з'єднують частини у вихідну конструкцію 1 і повертають у вихідн у орієнтацію. Приклад лобового зіткнення відповідає випадку екстремальної для безпеки КА орієнтації відносної швидкості системи "КА-КО". Джерела інформації 1. Ремеза А.И., Хекай В.М. Оценка возможности использования малых транспортних космических аппаратов для увода с геостационарной орбиты космических объектов, в том числе крупногабаритных элементов космического мукора // Космонавтика и ракетодинамика. - 2000. - №18. С.187-192. 8 2. Перспективы исследования проблем техногенного засорения околоземного космического пространства / В.В. Алавердов, Ю.Е. Левицкий, В.И. Лукьященко и др. / Космонавтика и ракетодинамика. - 2000. - №18. - С.7-11. 3. Защита служебного модуля международной космической станции от метеорных и техногенных частиц / А.В. Горбенко, Л.В. Зинченко, Н.Г. Паничкин / Космонавтика и ракетодинамика. - 2000. №18. - С.158-165. 4. Динамика малых космических тросовых систем, стабилизированным вращением / А.П. Алпатов, В.В. Белецкий, В.И. Драновский и др. / Техническая механика. - 2001. - №1. - С.85-100. 9 Комп’ютерна в ерстка В. Клюкін 72416 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for avoiding collision of spacecraft with dangerous extraterrestrial object
Автори англійськоюAvdieiev Volt Vasyliovych, Dron Mykola Mykhailovych, Kurinnyi Valerii Valeriiovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСпособ уклонения космического аппарата от столкновения с опасным космическим объектом и устройство для его осуществления
Автори російськоюАвдеев Вольт Васильевич, Дронь Николай Михайлович, Куренной Валерий Валерьевич, Хорольский Петр Георгиевич
МПК / Мітки
МПК: B64G 1/22
Мітки: зіткнення, об'єктом, небезпечним, пристрій, космічним, спосіб, апарата, здійснення, ухилення, космічного
Код посилання
<a href="https://ua.patents.su/5-72416-sposib-ukhilennya-kosmichnogo-aparata-vid-zitknennya-z-nebezpechnim-kosmichnim-obehktom-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб ухилення космічного апарата від зіткнення з небезпечним космічним об’єктом і пристрій для його здійснення</a>
Спосіб визначення відносного положення та природної відносної траєкторії другого зближуваного космічного апарата щодо першого та пристрій для його здійснення
Номер патенту: 27739
Опубліковано: 16.10.2000
Автор: Ферро Данієль
МПК: B64G 1/24
Мітки: пристрій, відносної, спосіб, здійснення, відносного, траєкторії, другого, визначення, космічного, першого, природної, положення, апарата, зближуваного
Текст:
...если указанный первый сближающийся космический аппарат имеет значительный и известный горизонтальный размах L, измеряют соответственно значение S1 или S2 места начала указанной системы отсчета, связанной с первым сближающимся космическим аппаратом, относительно указанной точки отсчета (О), связанной со вторым сближающимся космическим аппаратом, в каждый из моментов времени t1 и 12, измеряют в каждый из моментов времени t1 и 12,...
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його частин
Номер патенту: 73462
Опубліковано: 15.07.2005
Автор: Хитько Андрій Володимирович
МПК: F03H 1/00
Мітки: нейтралізації, апарата, електростатичного, космічного, спосіб, частин, поверхні, заряду
Формула / Реферат:
Спосіб нейтралізації електростатичного заряду поверхні космічного апарата та його часток, що включає перенесення електростатичного заряду у кулонах, який відрізняється тим, що перенесення електростатичного заряду здійснюють по стаціонарному мосту квазінейтральної плазми, який утворюють між космічним апаратом і плазмою космічного простору або між окремими електрично ізольованими одна від одної частками космічного апарата.
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Голоскоков Євген Григорович, Бандура Іван Миколайович, Кузнєцов Юрій Олексійович, Успенський Валерій Борисович
МПК: B64G 1/24
Мітки: апарата, розвантаження, системі, спосіб, космічного, силових, гіроскопів
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері і пристрій для його здійснення
Номер патенту: 70266
Опубліковано: 15.09.2004
Автори: Дронь Микола Михайлович, Пашков Анатолій Володимирович, Гринчишин Юрій Леонідович, Хорольський Петро Георгійович
МПК: B64G 1/00, F42B 15/00
Мітки: спасіння, літального, апарата, траєкторії, спуску, ступеня, здійснення, пристрій, спосіб, атмосфери
Формула / Реферат:
1. Спосіб спасіння ступеня літального апарата на траєкторії спуску в атмосфері, що полягає у прикладенні гальмуючого імпульсу аеродинамічними пристроями, зв'язаними із літальним апаратом нежорсткими елементами, який відрізняється тим, що після попадання літального апарата в атмосферу нежорсткі елементи, наприклад троси, звільняють від проміжних зв'язків із його корпусом, корпус розділяють на попередньо зв'язані цими тросами секції, наприклад...
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Мирна Олена Володимирівна, Гавриленко Олег Іванович, Пархоменко Юлія Анатоліївна, Лученко Олег Олексійович
МПК: B64G 1/28
Мітки: активного, відмовостійкого, апарата, орієнтацією, спосіб, управління, космічного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Попередній патент: Спосіб виготовлення імітованих горіхів та імітований горіх, одержаний цим способом
Наступний патент: Кристалічна натрієва сіль телмісартану і її застосування як антагоніста ангіотензину
Випадковий патент: Фільтр для очистки води