Активна віброзахисна система з автоматичним керуванням опор підшипників
Номер патенту: 80416
Опубліковано: 27.05.2013
Автори: Гапонов Володимир Степанович, Гайдамака Анатолій Володимирович, Наумов Олександр Іванович

Формула / Реферат
Активна віброзахисна система з автоматичним керуванням опор підшипників, яка містить несучу конструкцію у вигляді платформи з центральним пружним елементом та якорем електромагніта на опорі, пасивний регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів, які встановлені на напрямних і мають зв'язки боковими пружними елементами з платформою та опорою, коректор жорсткості у вигляді як мінімум двох нахилених пружних елементів з кутом нахилу α менше кута тертя спряження "повзун-напрямна" і шарнірно пов'язаних з платформою та з кожним інерційним повзуном, яка відрізняється тим, що на опорі розміщено мікроперемикач з реле часу із затримкою.
Текст
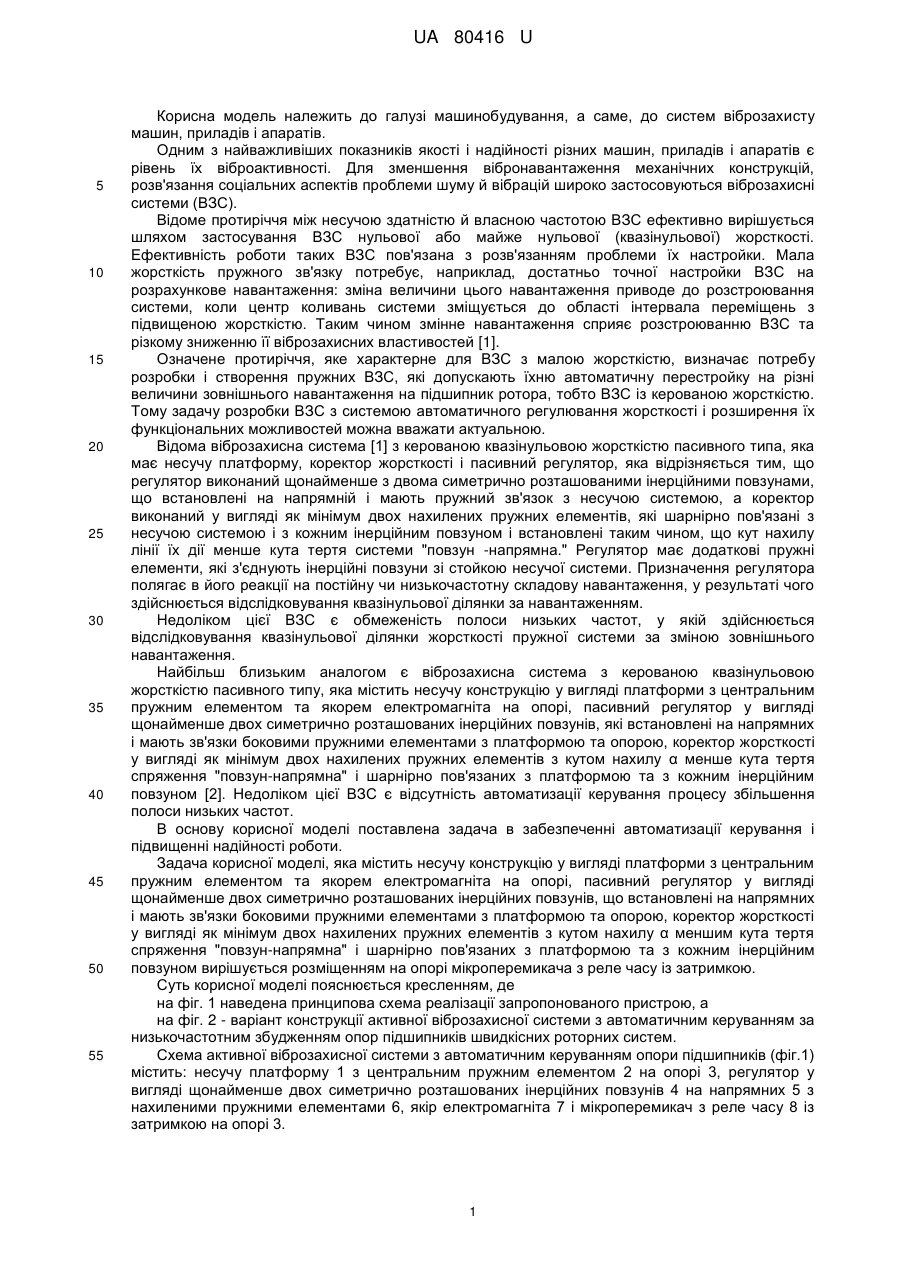
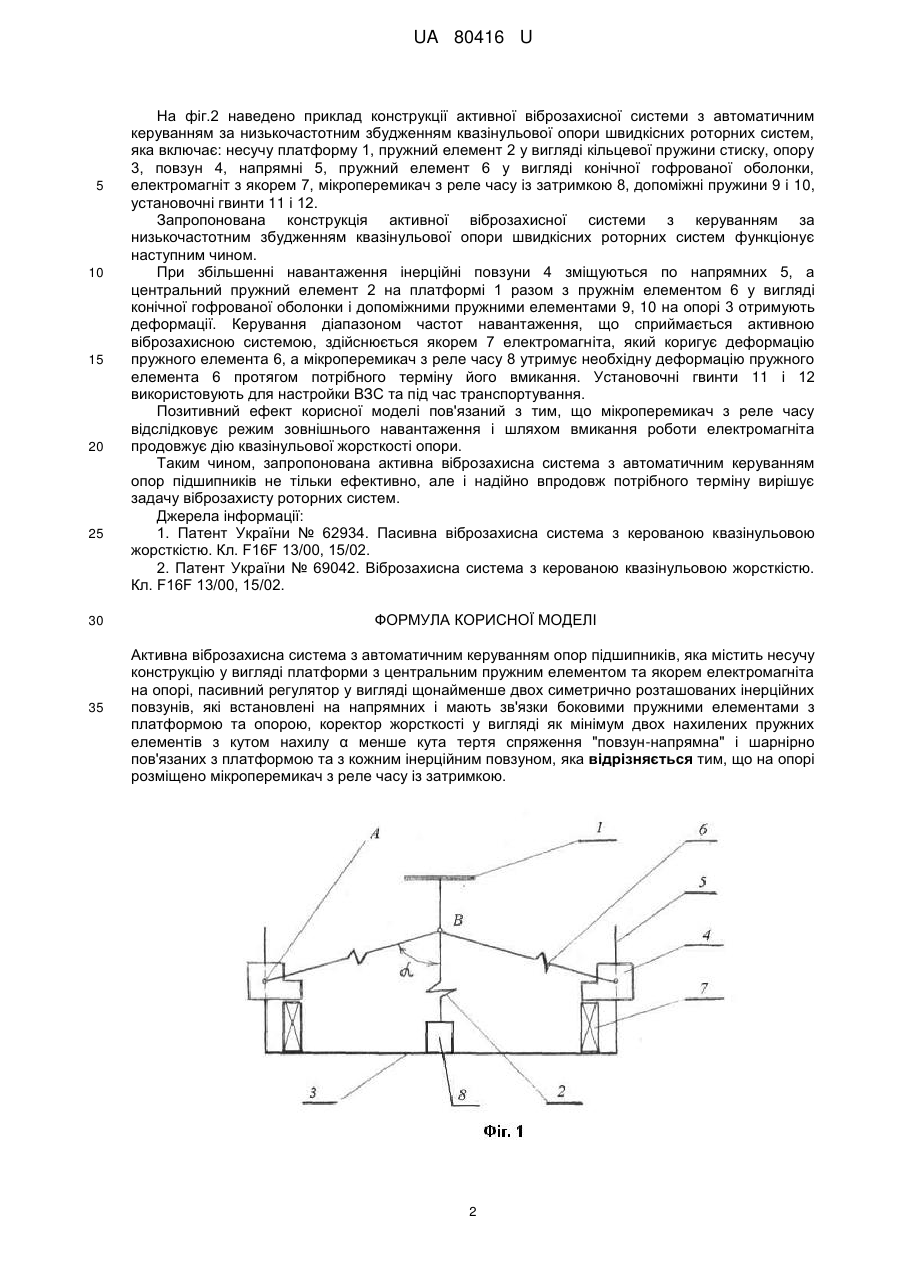
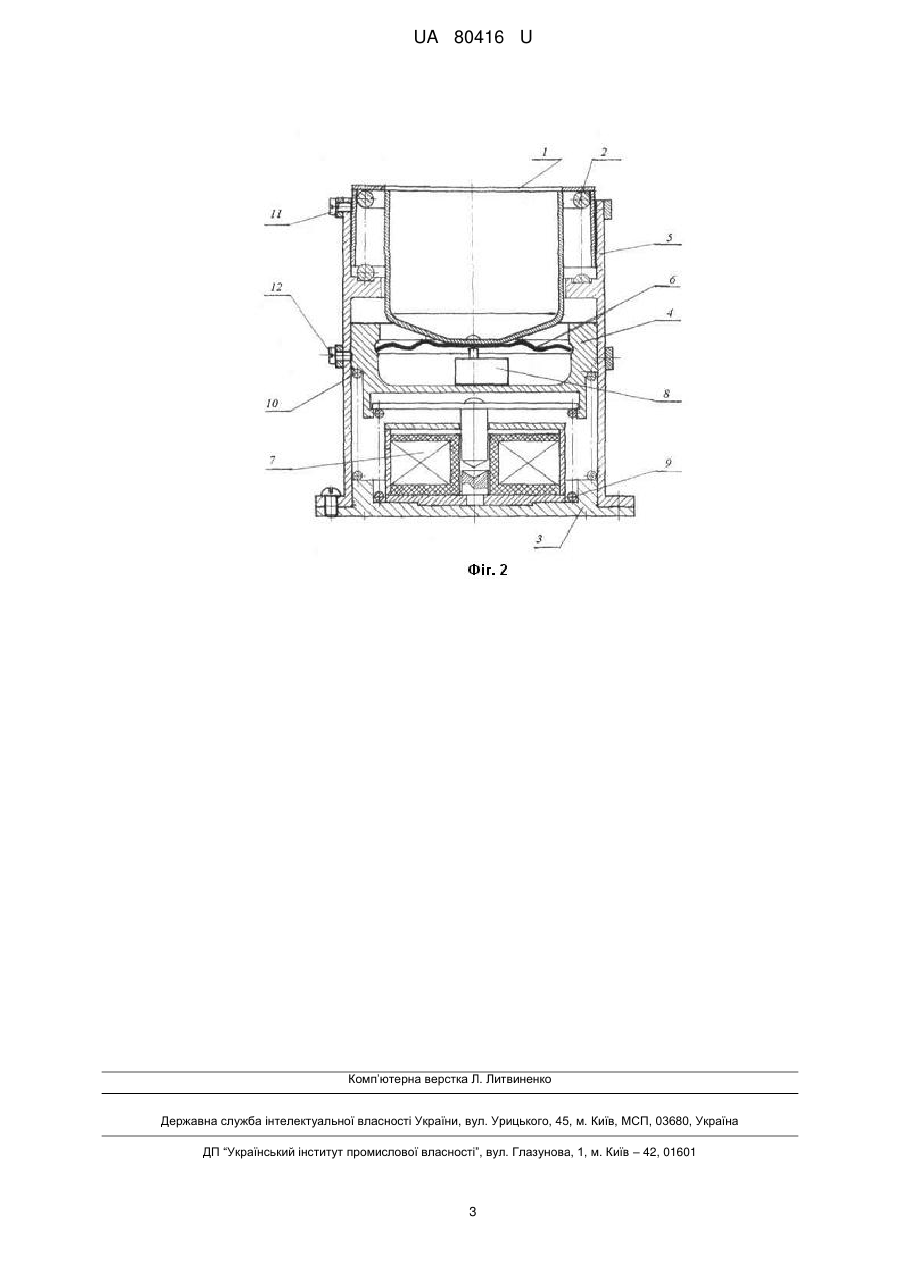
Реферат: Активна віброзахисна система з автоматичним керуванням опор підшипників містить несучу платформу з центральним пружним елементом та якорем електромагніта на опорі, пасивний регулятор у вигляді двох симетрично розташованих інерційних повзунів, напрямні, бокові пружні елементи, коректор жорсткості та мікроперемикач з реле часу із затримкою. UA 80416 U (54) АКТИВНА ВІБРОЗАХИСНА СИСТЕМА З АВТОМАТИЧНИМ КЕРУВАННЯМ ОПОР ПІДШИПНИКІВ UA 80416 U UA 80416 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування, а саме, до систем віброзахисту машин, приладів і апаратів. Одним з найважливіших показників якості і надійності різних машин, приладів і апаратів є рівень їх віброактивності. Для зменшення вібронавантаження механічних конструкцій, розв'язання соціальних аспектів проблеми шуму й вібрацій широко застосовуються віброзахисні системи (ВЗС). Відоме протиріччя між несучою здатністю й власною частотою ВЗС ефективно вирішується шляхом застосування ВЗС нульової або майже нульової (квазінульової) жорсткості. Ефективність роботи таких ВЗС пов'язана з розв'язанням проблеми їх настройки. Мала жорсткість пружного зв'язку потребує, наприклад, достатньо точної настройки ВЗС на розрахункове навантаження: зміна величини цього навантаження приводе до розстроювання системи, коли центр коливань системи зміщується до області інтервала переміщень з підвищеною жорсткістю. Таким чином змінне навантаження сприяє розстроюванню ВЗС та різкому зниженню її віброзахисних властивостей [1]. Означене протиріччя, яке характерне для ВЗС з малою жорсткістю, визначає потребу розробки і створення пружних ВЗС, які допускають їхню автоматичну перестройку на різні величини зовнішнього навантаження на підшипник ротора, тобто ВЗС із керованою жорсткістю. Тому задачу розробки ВЗС з системою автоматичного регулювання жорсткості і розширення їх функціональних можливостей можна вважати актуальною. Відома віброзахисна система [1] з керованою квазінульовою жорсткістю пасивного типа, яка має несучу платформу, коректор жорсткості і пасивний регулятор, яка відрізняється тим, що регулятор виконаний щонайменше з двома симетрично розташованими інерційними повзунами, що встановлені на напрямній і мають пружний зв'язок з несучою системою, а коректор виконаний у вигляді як мінімум двох нахилених пружних елементів, які шарнірно пов'язані з несучою системою і з кожним інерційним повзуном і встановлені таким чином, що кут нахилу лінії їх дії менше кута тертя системи "повзун -напрямна." Регулятор має додаткові пружні елементи, які з'єднують інерційні повзуни зі стойкою несучої системи. Призначення регулятора полягає в його реакції на постійну чи низькочастотну складову навантаження, у результаті чого здійснюється відслідковування квазінульової ділянки за навантаженням. Недоліком цієї ВЗС є обмеженість полоси низьких частот, у якій здійснюється відслідковування квазінульової ділянки жорсткості пружної системи за зміною зовнішнього навантаження. Найбільш близьким аналогом є віброзахисна система з керованою квазінульовою жорсткістю пасивного типу, яка містить несучу конструкцію у вигляді платформи з центральним пружним елементом та якорем електромагніта на опорі, пасивний регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів, які встановлені на напрямних і мають зв'язки боковими пружними елементами з платформою та опорою, коректор жорсткості у вигляді як мінімум двох нахилених пружних елементів з кутом нахилу α менше кута тертя спряження "повзун-напрямна" і шарнірно пов'язаних з платформою та з кожним інерційним повзуном [2]. Недоліком цієї ВЗС є відсутність автоматизації керування процесу збільшення полоси низьких частот. В основу корисної моделі поставлена задача в забезпеченні автоматизації керування і підвищенні надійності роботи. Задача корисної моделі, яка містить несучу конструкцію у вигляді платформи з центральним пружним елементом та якорем електромагніта на опорі, пасивний регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів, що встановлені на напрямних і мають зв'язки боковими пружними елементами з платформою та опорою, коректор жорсткості у вигляді як мінімум двох нахилених пружних елементів з кутом нахилу α меншим кута тертя спряження "повзун-напрямна" і шарнірно пов'язаних з платформою та з кожним інерційним повзуном вирішується розміщенням на опорі мікроперемикача з реле часу із затримкою. Суть корисної моделі пояснюється кресленням, де на фіг. 1 наведена принципова схема реалізації запропонованого пристрою, а на фіг. 2 - варіант конструкції активної віброзахисної системи з автоматичним керуванням за низькочастотним збудженням опор підшипників швидкісних роторних систем. Схема активної віброзахисної системи з автоматичним керуванням опори підшипників (фіг.1) містить: несучу платформу 1 з центральним пружним елементом 2 на опорі 3, регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів 4 на напрямних 5 з нахиленими пружними елементами 6, якір електромагніта 7 і мікроперемикач з реле часу 8 із затримкою на опорі 3. 1 UA 80416 U 5 10 15 20 25 30 35 На фіг.2 наведено приклад конструкції активної віброзахисної системи з автоматичним керуванням за низькочастотним збудженням квазінульової опори швидкісних роторних систем, яка включає: несучу платформу 1, пружний елемент 2 у вигляді кільцевої пружини стиску, опору 3, повзун 4, напрямні 5, пружний елемент 6 у вигляді конічної гофрованої оболонки, електромагніт з якорем 7, мікроперемикач з реле часу із затримкою 8, допоміжні пружини 9 і 10, установочні гвинти 11 і 12. Запропонована конструкція активної віброзахисної системи з керуванням за низькочастотним збудженням квазінульової опори швидкісних роторних систем функціонує наступним чином. При збільшенні навантаження інерційні повзуни 4 зміщуються по напрямних 5, а центральний пружний елемент 2 на платформі 1 разом з пружнім елементом 6 у вигляді конічної гофрованої оболонки і допоміжними пружними елементами 9, 10 на опорі 3 отримують деформації. Керування діапазоном частот навантаження, що сприймається активною віброзахисною системою, здійснюється якорем 7 електромагніта, який коригує деформацію пружного елемента 6, а мікроперемикач з реле часу 8 утримує необхідну деформацію пружного елемента 6 протягом потрібного терміну його вмикання. Установочні гвинти 11 і 12 використовують для настройки ВЗС та під час транспортування. Позитивний ефект корисної моделі пов'язаний з тим, що мікроперемикач з реле часу відслідковує режим зовнішнього навантаження і шляхом вмикання роботи електромагніта продовжує дію квазінульової жорсткості опори. Таким чином, запропонована активна віброзахисна система з автоматичним керуванням опор підшипників не тільки ефективно, але і надійно впродовж потрібного терміну вирішує задачу віброзахисту роторних систем. Джерела інформації: 1. Патент України № 62934. Пасивна віброзахисна система з керованою квазінульовою жорсткістю. Кл. F16F 13/00, 15/02. 2. Патент України № 69042. Віброзахисна система з керованою квазінульовою жорсткістю. Кл. F16F 13/00, 15/02. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Активна віброзахисна система з автоматичним керуванням опор підшипників, яка містить несучу конструкцію у вигляді платформи з центральним пружним елементом та якорем електромагніта на опорі, пасивний регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів, які встановлені на напрямних і мають зв'язки боковими пружними елементами з платформою та опорою, коректор жорсткості у вигляді як мінімум двох нахилених пружних елементів з кутом нахилу α менше кута тертя спряження "повзун-напрямна" і шарнірно пов'язаних з платформою та з кожним інерційним повзуном, яка відрізняється тим, що на опорі розміщено мікроперемикач з реле часу із затримкою. 2 UA 80416 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюActive vibro-protective system with automated control of bearing supports
Автори англійськоюHaponov Volodymyr Stepanovych, Haidamaka Anatolii Volodymyrovych, Naumov Oleksandr Ivanovych
Назва патенту російськоюАктивная виброзащитная система с автоматическим управлением опор подшипников
Автори російськоюГапонов Владимир Степанович, Гайдамака Анатолий Владимирович, Наумов Александр Иванович
МПК / Мітки
МПК: F16F 15/02, F16F 13/00
Мітки: автоматичним, опор, віброзахисна, активна, підшипників, система, керуванням
Код посилання
<a href="https://ua.patents.su/5-80416-aktivna-vibrozakhisna-sistema-z-avtomatichnim-keruvannyam-opor-pidshipnikiv.html" target="_blank" rel="follow" title="База патентів України">Активна віброзахисна система з автоматичним керуванням опор підшипників</a>
Віброзахисна система з керованою квазінульовою жорсткістю
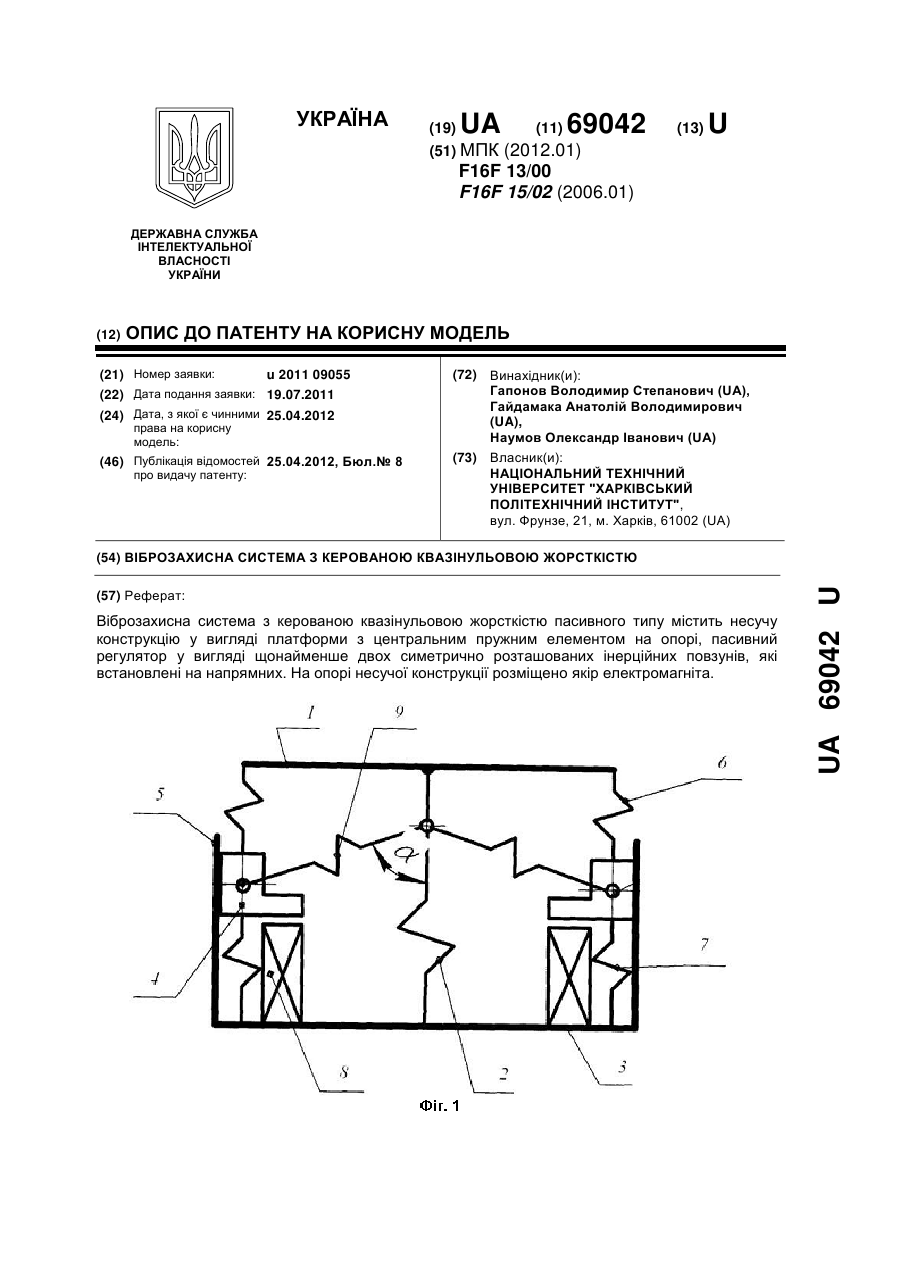
Номер патенту: 69042
Опубліковано: 25.04.2012
Автори: Гайдамака Анатолій Володимирович, Гапонов Володимир Степанович, Наумов Олександр Іванович
МПК: F16F 15/02, F16F 13/00
Мітки: жорсткістю, система, керованою, віброзахисна, квазінульовою
Формула / Реферат:
Віброзахисна система з керованою квазінульовою жорсткістю пасивного типу, яка містить несучу конструкцію у вигляді платформи з центральним пружним елементом на опорі, пасивний регулятор у вигляді щонайменше двох симетрично розташованих інерційних повзунів, які встановлені на напрямних і мають зв'язки боковими пружними елементами з платформою та опорою, коректор жорсткості, у вигляді як мінімум двох нахилених пружних елементів, з кутом нахилу...
Пасивна віброзахисна система з керованою квазінульовою жорсткістю

Номер патенту: 62934
Опубліковано: 15.01.2004
Автори: Калінін Павло Миколайович, Гапонов Володимир Степанович
МПК: F16F 15/02, F16F 13/00
Мітки: керованою, жорсткістю, віброзахисна, пасивна, система, квазінульовою
Формула / Реферат:
1. Пасивна віброзахисна система з керованою квазінульовою жорсткістю, яка містить у своєму складі несучу систему, коректор жорсткості і пасивний регулятор, яка відрізняється тим, що регулятор виконаний щонайменше з двох симетрично розташованих інерційних повзунів, які встановлені на напрямній і мають пружний зв’язок з несучою системою, а коректор виконаний у вигляді щонайменше двох похилих пружних елементів, що шарнірно зв’язані з несучою...
Гідропрес з автоматичним керуванням
Номер патенту: 59512
Опубліковано: 10.05.2011
Автори: Соколов Володимир Ілліч, Таванюк Тетяна Яківна, Рей Роман Іванович, Соколова Яна Володимирівна, Гутько Юрій Іванович
МПК: B30B 15/16
Мітки: керуванням, гідропрес, автоматичним
Формула / Реферат:
Гідропрес з автоматичним керуванням, що містить робочий орган, з'єднаний з двигуном, та автоматичний привод, який відрізняється тим, що у пристрої розташовано датчик зворотного зв'язку за переміщенням робочого органу.
Трубопровідна арматура з автоматичним керуванням
Номер патенту: 34360
Опубліковано: 11.08.2008
Автори: Рисухін Леонід Іванович, Васькевич Віктор Геннадійович, Коваленко Алім Олексійович, Соколов Володимир Ілліч, Андрійчук Микола Данилович
МПК: B21C 37/15
Мітки: керуванням, трубопровідна, автоматичним, арматура
Формула / Реферат:
Трубопровідна арматура з автоматичним керуванням, що містить регулюючий орган, зв'язаний з двигуном, та автоматичний привод, яка відрізняється тим, що у пристрої розташовано датчик зворотного зв'язку, який слідкує за переміщенням регулюючого органу.
Гідропрес з автоматичним програмним керуванням
Номер патенту: 65782
Опубліковано: 12.12.2011
Автори: Грєшний Дмитро Сергійович, Соколова Яна Володимирівна, Соколов Володимир Ілліч, Бурлаков Євген Ігорович, Рамазанов Султанахмед Курбанович
МПК: B30B 15/16
Мітки: гідропрес, керуванням, програмним, автоматичним
Формула / Реферат:
Гідропрес з автоматичним програмним керуванням, що містить робочий орган, сполучений з гідродвигуном, та автоматичний гідропривід з регулятором витрати, який відрізняється тим, що містить кроковий двигун для програмного керування дроселем регулятора витрати.
Попередній патент: Спосіб визначення координат пунктів спостереженнями сигналів супутникової навігаційної системи
Наступний патент: Кріпильний пристрій
Випадковий патент: Форсований диференціатор неелектричних сигналів