Спосіб визначення координат пунктів спостереженнями сигналів супутникової навігаційної системи
Номер патенту: 80415
Опубліковано: 27.05.2013
Автори: Луньов Андрій Олександрович, Кренида Юрій Федорович, Ковальов Кирило Володимирович, Левшенков Денис Віталійович
Формула / Реферат
Спосіб визначення координат пунктів спостереження сигналів супутникової навігаційної системи, що включає рекогносцировку найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, установлення точності координат найближчих відомих пунктів, визначення необхідної точності характерних і вихідної шуканих точок, виконання вимірів, визначення координат вихідної шуканої точки прокладкою тахеометричного ходу від найближчих відомих пунктів геодезичної мережі, який відрізняється тим, що прийом сигналів супутникової навігаційної системи здійснюють у двох-трьох проміжних точках, розташованих у будь-якій точці плоского даху будинку, на безпечній відстані від його краю, координати характерних шуканих точок, які є вершинами тригранних кутів перетинання фасадів і площини верхньої горизонтальної грані стіни, визначають від проміжних пунктів прямою аналітичною геодезичною засічкою, координати шуканої вихідної точки на земній поверхні визначають від характерних шуканих точок зворотною аналітичною геодезичною засічкою, а необхідність використання супутникової навігаційної системи визначають з виразу:
![]() ,
,
де ![]() - витрати на геодезичні побудови визначення координат і шуканих точок на земній поверхні традиційною технологією;
- витрати на геодезичні побудови визначення координат і шуканих точок на земній поверхні традиційною технологією;
![]() - витрати на пряму і зворотну геодезичні засічки та прийом і обробка сигналів супутників.
- витрати на пряму і зворотну геодезичні засічки та прийом і обробка сигналів супутників.
Текст
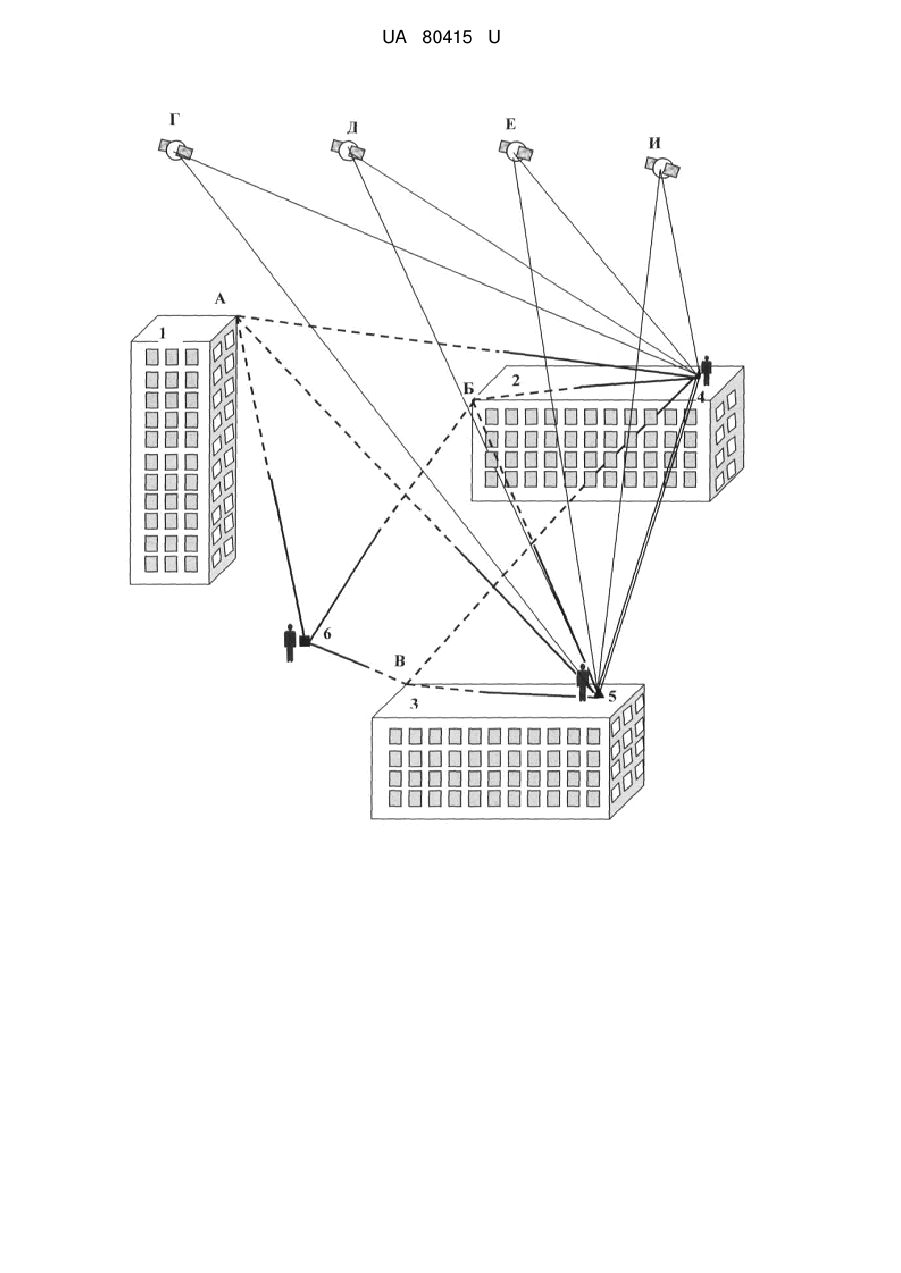
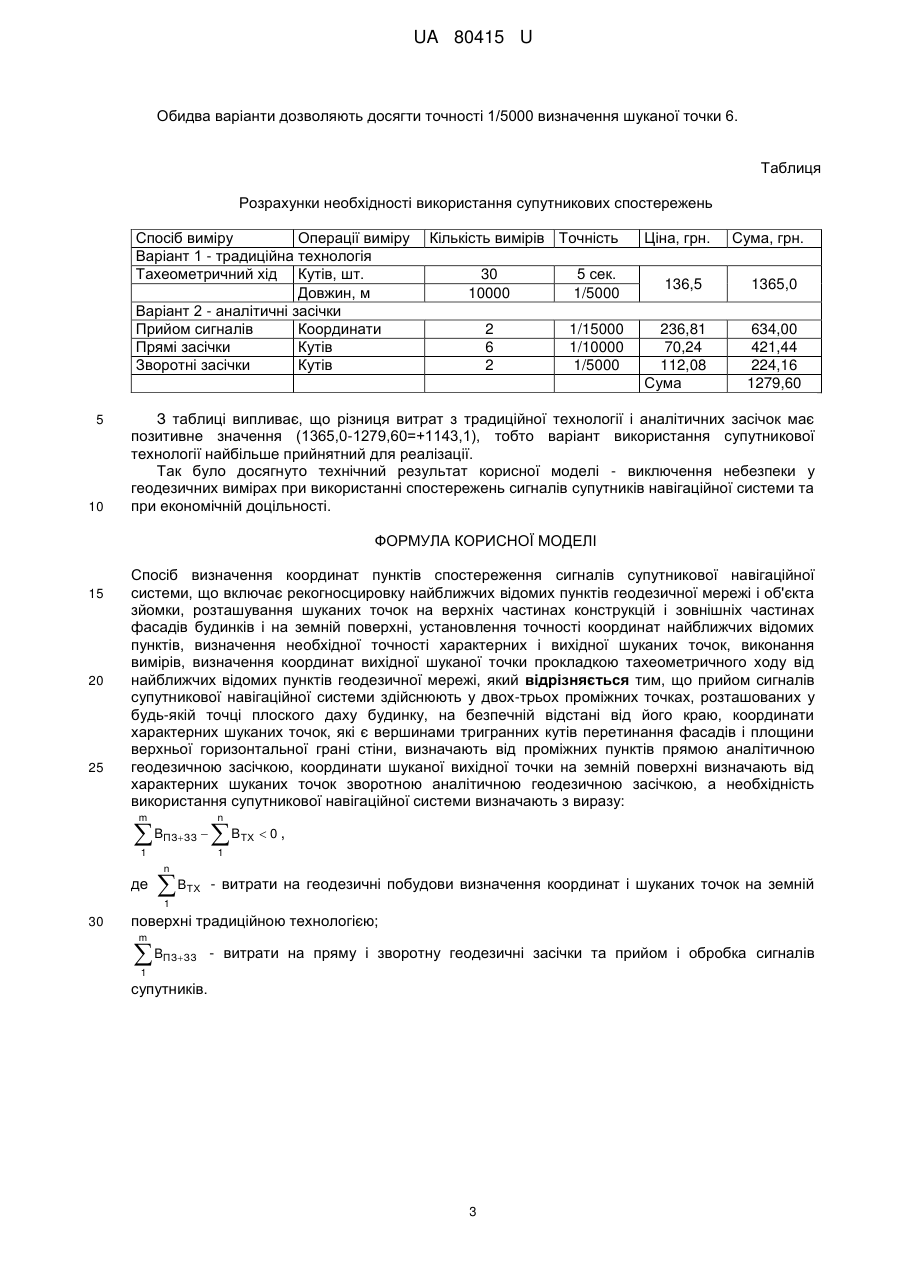
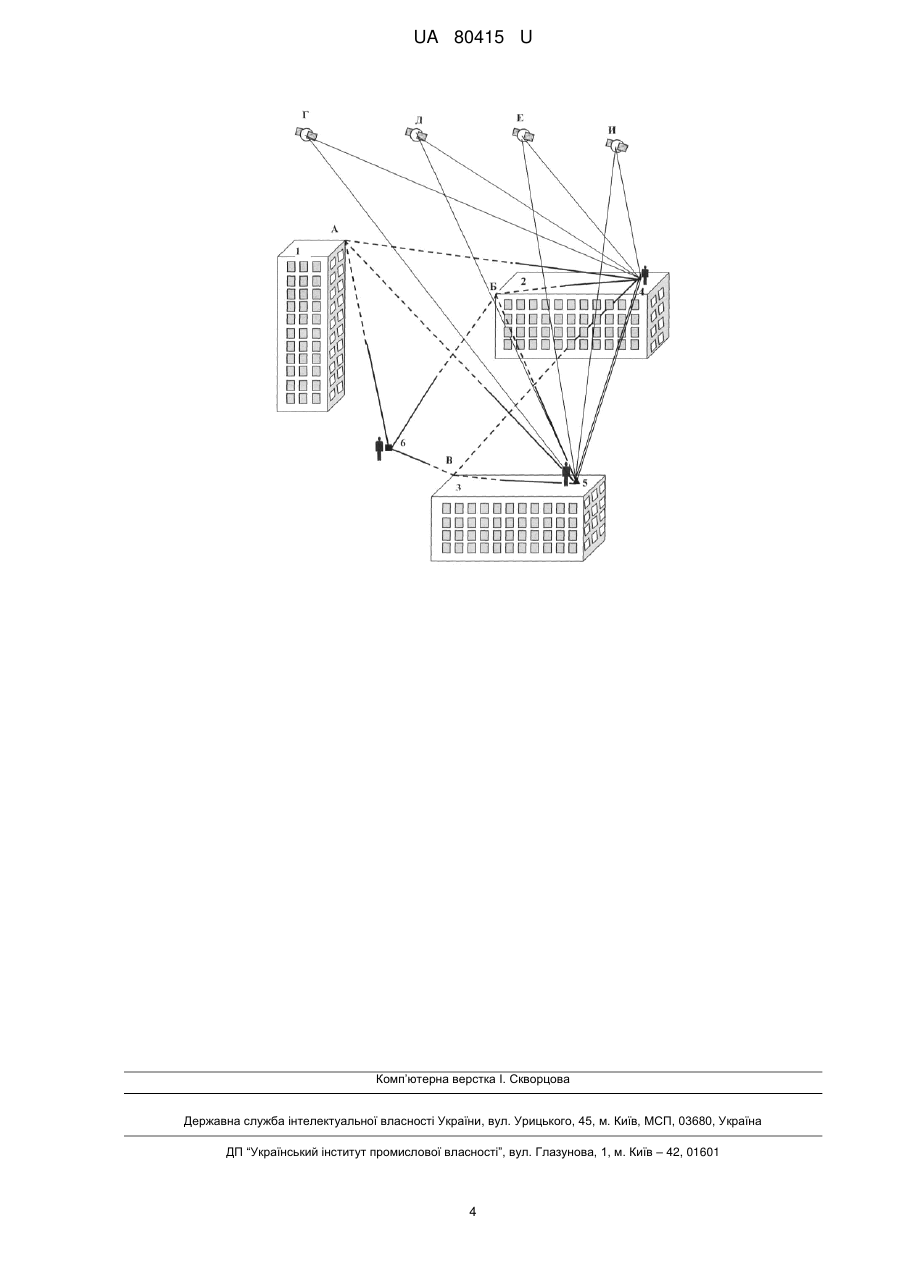
Реферат: Спосіб визначення координат пунктів спостереження сигналів супутникової навігаційної системи включає рекогносцировку найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, установлення точності координат найближчих відомих пунктів, визначення необхідної точності характерних і вихідної шуканих точок, виконання вимірів, визначення координат вихідної шуканої точки прокладкою тахеометричного ходу від найближчих відомих пунктів геодезичної мережі. Прийом сигналів супутникової навігаційної системи здійснюють у двох-трьох проміжних точках, розташованих у будь-якій точці плоского даху будинку, на безпечній відстані від його краю. Координати характерних шуканих точок, які є вершинами тригранних кутів перетинання фасадів і площини верхньої горизонтальної грані стіни, визначають від проміжних пунктів прямою аналітичною геодезичною засічкою. Координати шуканої вихідної точки на земній поверхні визначають від характерних шуканих точок зворотною аналітичною геодезичною засічкою, а необхідність використання супутникової навігаційної системи визначають за заданим виразом. UA 80415 U (54) СПОСІБ ВИЗНАЧЕННЯ КООРДИНАТ ПУНКТІВ СПОСТЕРЕЖЕННЯМИ СИГНАЛІВ СУПУТНИКОВОЇ НАВІГАЦІЙНОЇ СИСТЕМИ UA 80415 U UA 80415 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до забезпечення геодезичного вишукування у містах, селищах, на площадках промислового і житлового будівництва, при будівництві і зйомці підземних комунікацій, у маркшейдерських роботах, при землевпорядженні, земельному кадастрі, меліорації земель, при виконанні господарських робіт на щільно забудованих територіях. Відомий спосіб коректування вимірів при детальних розподільних роботах на високих монтажних горизонтах (Патент РФ № 2269095, МПК G01C 07/02, Е04В 1/18 від 19.03.2004), що включає визначення тахеометричним ходом координат шуканих характерних точок спорудження, розташованих на проміжних поверхах і дахах, від координат найближчих відомих пунктів. Аналог не визначає координати шуканих характерних точок спорудження за допомогою спостережень сигналів супутників навігаційної системи. Найбільш близьким аналогом до корисної моделі, що заявляється, є спосіб визначення координат шуканих точок при виконанні вишукувань за допомогою супутникової системи (патент України винаходу № 98396, МПК G01C 21/00, від 10.05.2012), що включає рекогносцировку найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, визначення необхідної точності характерних і вихідної шуканих точок, прийом сигналів супутникової навігаційної системи у характерних точках, виконання вимірів. Найбільш близький аналог становить значну небезпеку при прийомі сигналів супутникової навігаційної системи у характерних шуканих точках безпосередньо на краю даху висотної будівлі. Ознаками найбільш близького аналога, що збігаються з істотними ознаками корисної моделі, що заявляється, є: рекогносцировка найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, визначення необхідної точності характерних і вихідної шуканих точок, виконання вимірів, прийом сигналів супутникової навігаційної системи у характерних точках і визначення їх координат, виконання вимірів. В основу корисної моделі поставлена задача удосконалення способу визначення координат шуканих точок при виконанні вишукувань за допомогою супутникової системи шляхом того, що прийом сигналів супутникової навігаційної системи здійснюють у проміжних точках, розташованих у будь-якій точці безпосередньо на плоскому даху будинку на безпечній відстані від його краю, чим досягають технічного результату - забезпечення безпеки при виключенні прийому сигналів супутників у характерних шуканих точках безпосередньо на краю даху висотної будівлі. Поставлена задача вирішується тим, що у відомому способі визначення координат шуканих точок при виконанні вишукувань за допомогою супутникової системи, що включає рекогносцировку найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, установлення точності координат найближчих відомих пунктів, визначення необхідної точності характерних і вихідної шуканих точок, прийом сигналів супутникової навігаційної системи у характерних точках, виконання вимірів, згідно з корисною моделлю, прийом сигналів супутникової навігаційної системи здійснюють у двох-трьох проміжних точках, розташованих у будь-якій точці плоского даху будинку на безпечній відстані від його краю, координати характерних шуканих точок, які є вершинами тригранних кутів перетинання фасадів і площини верхньої горизонтальної грані стіни, визначають від проміжних пунктів прямою аналітичною геодезичною засічкою, координати шуканої вихідної точки на земній поверхні визначають від характерних шуканих точок зворотною аналітичною геодезичною засікою, а необхідність використання супутникової навігаційної системи визначають з виразу: m n BПЗ ЗЗ BТХ 0 1 1 , n 55 BТХ де 1 - витрати на геодезичні побудови визначення координат шуканих точок на земній поверхні традиційною технологією; 1 UA 80415 U m BПЗЗЗ 5 10 15 20 25 30 35 40 45 1 - витрати на пряму і зворотну геодезичні засічки та прийом і обробка сигналів супутників, чим досягають технічного результату - забезпечення безпеки при виключенні прийому сигналів супутникової навігаційної системи у характерних шуканих точках безпосередньо на краю даху висотної будівлі. Визначені ознаки складають суть корисної моделі, тому що є необхідними і достатніми для досягнення технічного результату. Причинно-наслідковий зв'язок суттєвих ознак з технічним результатом, що досягається, пояснюється наступним: пропонований спосіб дозволяє виключити небезпеку при прийомі сигналів супутникової навігаційної системи при його економічній доцільності. Суть корисної моделі пояснюється кресленням, де зображені багатоповерхові будинки 1, 2, 3, безпосередньо на дахах яких розташовані проміжні точки 4, 5 на безпечній відстані від його краю, на які були прийняті сигнали від супутників Г, Д, Е, И, та шукана вихідна точка 6 на земній поверхні, а характерні шукані точки А, Б, В є вершинами тригранних кутів перетинання фасадів і площин верхніх горизонтальних граней стіни будинків 1, 2, 3, також прямі аналітичні геодезичні засічки 4А5, 4Б5, 4В5 і зворотна аналітична геодезична засічка 6АБВ. З досвіду використання прийму сигналів супутникової навігаційної системи встановлено, що розташування антен приймачів цих сигналів на краях дахів будинків зв'язано з суттєвою небезпекою падіння людини з краю даху. Тому виникла необхідність виключити цю небезпеку з процесу геодезичних вимірів. Це досягається за рахунок того, що при рекогносцировці найближчих відомих пунктів геодезичної мережі і об'єкту зйомки для розташування шуканих точок обрані плоскі верхні частини конструкцій, тобто плоскі дахи будинків 1, 2, 3. У площині дахів цих будинків у будь-якій точці можна вибирати проміжні точки. Вибрали на дахах будинків 2 та 3 положення шуканих проміжних точок 4 та 5 на безпечній відстані від країв дахів. На земній поверхні обрали шукану вихідну точку 6. З нормативних документів та інших розрахунків визначили необхідні точності координат шуканих характерних точок А, Б, В, вихідної точки 6 та проміжних точок 4, 5. У проміжних точках 4 і 5 були встановлені антени приймачів сигналів супутників навігаційної системи. З урахуванням визначеної точності по відомій технології цими антенами здійснили прийом сигналів від супутників Г, Д, Е, И навігаційної системи і розрахували їх координати. У шуканих проміжних точках 4 і 5 були встановлені кутомірні прилади і виконані наступні виміри: кути прямої засічки 4А5 - A54, A45; кути прямої засічки 4Б5-B54, B45; кути прямої засічки 4В5-B54, B45. За допомогою цих вимірів і визначених координат точок 4, 5 розраховані координати шуканих характерних точок А, Б, В. У шуканій вихідній точці 6 також встановлено кутомірний прилад і виконані виміри кутів A6B та B6B зворотної засічки 6АБВ. Дослідженнями також встановлено, що дешевий спосіб визначення координат точок за допомогою прийому й обробки сигналів супутникової навігаційної системи не завжди має економічну вигоду. Зайві витрати виникають за рахунок додаткових геодезичних побудов прийому сигналів супутників, вимірів прямої та зворотної засічок. Відокремлювання цих випадків необхідно визначати за формулою: m n BПЗ ЗЗ BТХ 0 1 1 , n BТХ де 1 - витрати на геодезичні побудови визначення координат шуканих точок на земній поверхні традиційною технологією; m BПЗ ЗЗ 50 1 - витрати на пряму і зворотну геодезичні засічки та прийом і обробка сигналів супутників. В таблиці виконані розрахунки двох варіантів витрат на геодезичні виміри: 1. Варіант 1 - з використанням традиційної технології. 2. Варіант 2 - пропонована технологія з використанням аналітичних засічок. 2 UA 80415 U Обидва варіанти дозволяють досягти точності 1/5000 визначення шуканої точки 6. Таблиця Розрахунки необхідності використання супутникових спостережень Спосіб виміру Операції виміру Варіант 1 - традиційна технологія Тахеометричний хід Кутів, шт. Довжин, м Варіант 2 - аналітичні засічки Прийом сигналів Координати Прямі засічки Кутів Зворотні засічки Кутів 5 10 Кількість вимірів Точність 30 10000 5 сек. 1/5000 2 6 2 1/15000 1/10000 1/5000 Ціна, грн. Сума, грн. 136,5 1365,0 236,81 70,24 112,08 Сума 634,00 421,44 224,16 1279,60 З таблиці випливає, що різниця витрат з традиційної технології і аналітичних засічок має позитивне значення (1365,0-1279,60=+1143,1), тобто варіант використання супутникової технології найбільше прийнятний для реалізації. Так було досягнуто технічний результат корисної моделі - виключення небезпеки у геодезичних вимірах при використанні спостережень сигналів супутників навігаційної системи та при економічній доцільності. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Спосіб визначення координат пунктів спостереження сигналів супутникової навігаційної системи, що включає рекогносцировку найближчих відомих пунктів геодезичної мережі і об'єкта зйомки, розташування шуканих точок на верхніх частинах конструкцій і зовнішніх частинах фасадів будинків і на земній поверхні, установлення точності координат найближчих відомих пунктів, визначення необхідної точності характерних і вихідної шуканих точок, виконання вимірів, визначення координат вихідної шуканої точки прокладкою тахеометричного ходу від найближчих відомих пунктів геодезичної мережі, який відрізняється тим, що прийом сигналів супутникової навігаційної системи здійснюють у двох-трьох проміжних точках, розташованих у будь-якій точці плоского даху будинку, на безпечній відстані від його краю, координати характерних шуканих точок, які є вершинами тригранних кутів перетинання фасадів і площини верхньої горизонтальної грані стіни, визначають від проміжних пунктів прямою аналітичною геодезичною засічкою, координати шуканої вихідної точки на земній поверхні визначають від характерних шуканих точок зворотною аналітичною геодезичною засічкою, а необхідність використання супутникової навігаційної системи визначають з виразу: m n BПЗ ЗЗ де B 1 B ТХ 0, 1 n ТХ - витрати на геодезичні побудови визначення координат і шуканих точок на земній 1 30 поверхні традиційною технологією; m B ПЗ ЗЗ - витрати на пряму і зворотну геодезичні засічки та прийом і обробка сигналів 1 супутників. 3 UA 80415 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of coordinates of observation points of satellite navigation system signals
Автори англійськоюKrenida Yurii Fedorovych, Kovaliov Kyrylo Volodymyrovych, Luniov Andrii Oleksandrovych, Levshenkov Denys Vitaliovych
Назва патенту російськоюСпособ определения координат пунктов наблюдения сигналов спутниковой навигационной системы
Автори російськоюКренида Юрий Федорович, Ковалев Кирилл Владимирович, Лунев Андрей Александрович, Левшенков Денис Витальевич
МПК / Мітки
МПК: G01C 21/00
Мітки: спостереженнями, спосіб, визначення, пунктів, сигналів, навігаційної, системі, координат, супутникової
Код посилання
<a href="https://ua.patents.su/6-80415-sposib-viznachennya-koordinat-punktiv-sposterezhennyami-signaliv-suputnikovo-navigacijjno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат пунктів спостереженнями сигналів супутникової навігаційної системи</a>
Спосіб визначення координат шуканих точок при виконанні вишукувань за допомогою супутникової навігаційної системи
Номер патенту: 98396
Опубліковано: 10.05.2012
Автор: ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
МПК: G01C 21/00
Мітки: визначення, точок, супутникової, координат, спосіб, системі, навігаційної, вишукувань, допомогою, шуканих, виконанні
Формула / Реферат:
Спосіб визначення координат шуканих точок при виконанні вишукувань за допомогою супутникової навігаційної системи, що включає рекогносцировку точок згущення, визначення їх точності, закладення шуканих точок згущення і безпосереднього знімального обґрунтування на будинках і на земній поверхні, визначення точності геодезичних побудов шуканих точок згущення і знімального обґрунтування, виконання виміру, визначення координат шуканих точок, який...
Спосіб корегування пошуків за допомогою супутникової навігаційної системи
Номер патенту: 58548
Опубліковано: 11.04.2011
Автор: ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
МПК: G01C 21/00
Мітки: супутникової, пошуків, корегування, допомогою, навігаційної, системі, спосіб
Формула / Реферат:
Спосіб корегування пошуків за допомогою супутникової навігаційної системи, що включає рекогносцировку відомих точок геодезичної мережі, точок згущення, визначення їхніх класів точності, вибір відомих точок як вихідних, закладення шуканих точок згущення і безпосереднього знімального обґрунтування на будинках і на земній поверхні, визначення точності геодезичних побудов шуканих точок згущення і знімального обґрунтування, виконання виміру,...
Спосіб комплексної обробки навігаційної інформації від датчиків курсо-швидкісної навігаційної системи і супутникової навігаційної системи літального апарата
Номер патенту: 70281
Опубліковано: 11.06.2012
Автори: Захарін Фелікс Михайлович, Пономаренко Сергій Олексійович
МПК: G06F 17/00, G01C 23/00, G01C 21/20
Мітки: курсо-швидкісної, літального, апарата, датчиків, супутникової, спосіб, інформації, комплексної, обробки, системі, навігаційної
Формула / Реферат:
Спосіб комплексної обробки навігаційної інформації від датчиків курсо-швидкісної навігаційної системи і супутникової навігаційної системи літального апарата, що включає зчислення поточних координат місцеположення центру мас літального апарата у вибраній системі координат (частковоортодромічній, геоцентричній, географічній та ін.) за інформацією від датчиків курсо-швидкісної навігаційної системи, а також корекцію зчисленних координат за...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Рачук Владімір Сєргєєвіч, Карпов Анатолій Стєпановіч, Монахов Юрій Владіміровіч, Борісов Андрєй Владіміровіч, Ковалєвскій Міхаіл Марковіч, Іванов Робєрт Константіновіч
МПК: G01S 5/04, G01S 5/02, G01S 5/00
Мітки: спосіб, навігаційної, інерціальної, системі, положення, осей, базової, координат, відносної, визначення, варіанти, об'єкта
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб контролю цілісності супутникової навігаційної системи в контрольно-корегуючій станції
Номер патенту: 60974
Опубліковано: 25.06.2011
Автори: Куценко Олександр Вікторович, Ковалевський Едуард Олександрович, Конін Валерій Викторовіч
МПК: G01S 5/14
Мітки: системі, навігаційної, контролю, спосіб, станції, контрольно-корегуючій, цілісності, супутникової
Формула / Реферат:
Спосіб контролю цілісності супутникової навігаційної системи в контрольно-корегуючій станції, який включає в себе вимірювання радіонавігаційних параметрів (псевдовідстаней) за сигналами від N навігаційних супутників (основний канал), формування комбінацій масивів псевдовідстаней з виключенням з масиву псевдовідстані до і-го навігаційного супутника (додаткові канали), вирішення навігаційної задачі з визначенням координат користувача по...
Попередній патент: Спосіб виготовлення шнека з еластичною гвинтовою поверхнею
Наступний патент: Активна віброзахисна система з автоматичним керуванням опор підшипників
Випадковий патент: Сушильний пристрій