Спосіб розрахунку моментів сил окорухових м’язів на поверхні моделі очного яблука
Номер патенту: 80907
Опубліковано: 10.06.2013
Автори: Кухаренко Дмитро Володимирович, Ємченко Віктор Іванович, Кирилаха Наталія Григорівна



Формула / Реферат
Спосіб розрахунку моментів сил окорухових м'язів на поверхні моделі очного яблука, який полягає у тому, що визначають сферичні координати на моделі, яка являє собою сферу з визначеним радіусом у відповідності до виразів:
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() - декартові координати;
- декартові координати;
![]() ,
, ![]() - сферичні координати сфери,
- сферичні координати сфери,
який відрізняється тим, що в комп'ютер вводять дані про тип м'язів, з можливістю визначити моменти сил цих м'язів, визначають момент сили м'яза відносно осей декартової системи координат у відповідності до виразів:
![]()
![]() ;
;
![]() .
.
де ![]() ,
, ![]() ,
, ![]() - проекції моменту сили м'яза відносно кожної з осей декартової системи координат;
- проекції моменту сили м'яза відносно кожної з осей декартової системи координат;
![]() ,
, ![]() ,
, ![]() - проекції сили м'яза відносно кожної з осей декартової системи координат;
- проекції сили м'яза відносно кожної з осей декартової системи координат;
![]() ,
, ![]() ,
, ![]() - декартові координати сфери.
- декартові координати сфери.
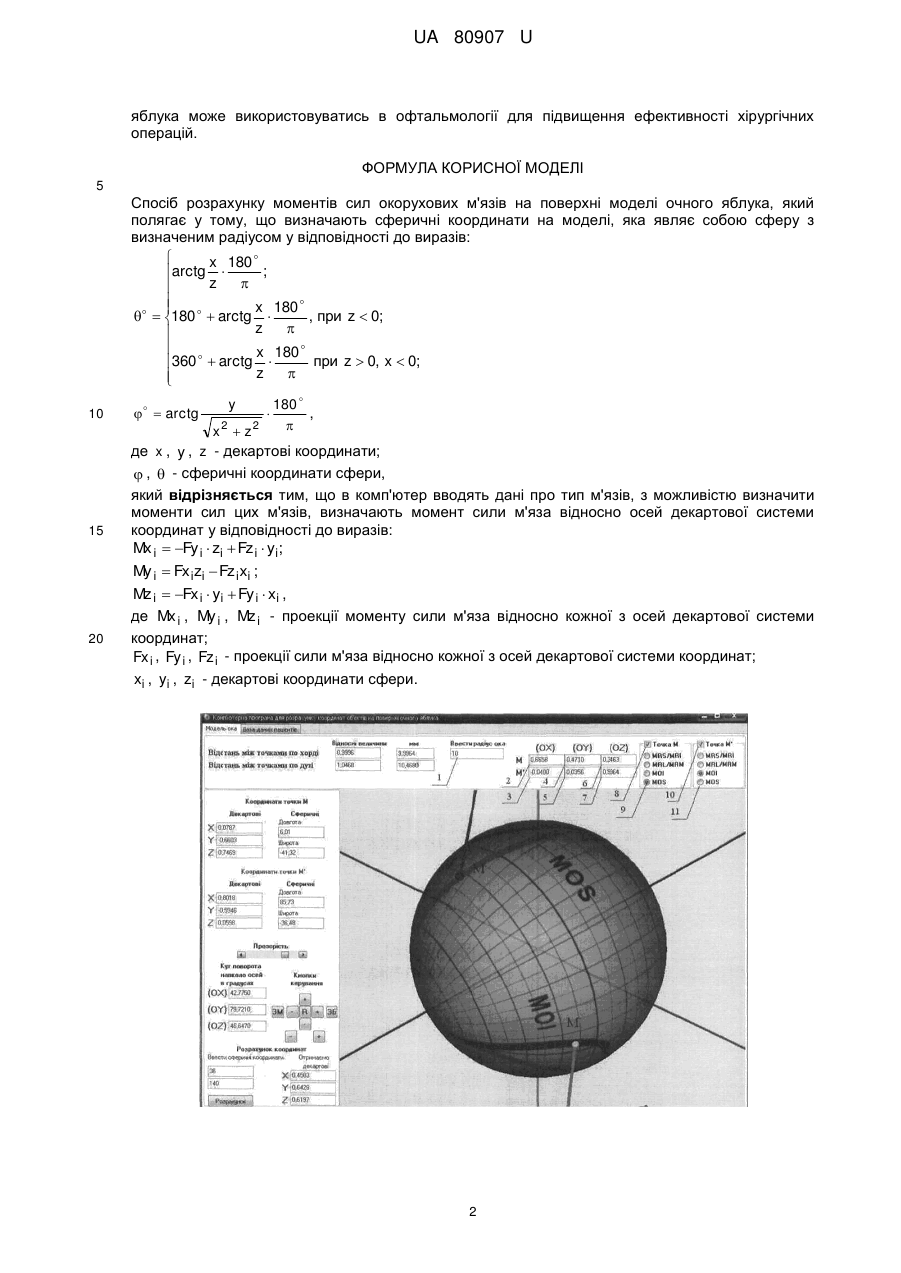
Текст
Реферат: Спосіб розрахунку моментів сил окорухових м'язів на поверхні моделі очного яблука полягає у тому, що визначають сферичні координати на моделі, яка являє собою сферу з визначеним радіусом у відповідності до виразів: x 180 ; arctg z x 180 180 arctg , при z 0; z x 180 при z 0, x 0; 360 arctg z 180 , x 2 z2 де x , y , z - декартові координати; , - сферичні координати сфери. В комп'ютер вводять дані про тип м'язів, з можливістю визначити моменти сил цих м'язів, визначають момент сили м'яза відносно осей декартової системи координат у відповідності до виразів: Mx i Fy i zi Fz i yi; arctg y My i Fx izi Fz i xi ; Mz i Fx i yi Fy i xi . де Mx i , My i , Mz i - проекції моменту сили м'яза відносно кожної з осей декартової системи координат; Fx i , Fy i , Fz i - проекції сили м'яза відносно кожної з осей декартової системи координат; xi , yi , zi - декартові координати сфери. UA 80907 U (54) СПОСІБ РОЗРАХУНКУ МОМЕНТІВ СИЛ ОКОРУХОВИХ М'ЯЗІВ НА ПОВЕРХНІ МОДЕЛІ ОЧНОГО ЯБЛУКА UA 80907 U UA 80907 U 5 10 Корисна модель належить до медицини, а саме до офтальмології, і може бути використана для підвищення ефективності хірургічних операцій і більш досконалого вивчення окорухових структур очного яблука людини. Аналогом даного способу є спосіб, який дає наочне представлення обертання моделі ока у тривимірній декартовій системі координат: [http://www.bausch-pharma.ru/dry_eye/fl/flashl.htm]. Недоліками аналога є неможливість автоматизовано проводити розрахунки, неможливість використання офтальмологічної сферичної системи координат, примітивність програмного забезпечення, а також тривимірне обертання, яке обмежене часом. Найближчим до корисної моделі є спосіб розрахунку координат об'єктів на поверхні моделі очного яблука [патент на корисну модель UA № 37269, А61В3/00, G09B23/00, опубл. 25.11.2008, бюл. 22], який полягає у тому, що визначають сферичні координати на моделі, яка являє собою сферу з визначеним радіусом у відповідності до виразів: x 180 ; arctg z x 180 180 arctg , при z 0; z x 180 при z 0, x 0; 360 arctg z arctg 15 20 25 30 35 40 45 y 180 , x 2 z2 де x, y, z - декартові координати; , - сферичні координати сфери. Недоліками прототипу є те, що неможливо автоматизовано проводити розрахунки моментів сил окорухового апарату, а також наочне відображення векторів сили тяги. Корисна модель усуває вказані недоліки. Задача корисної моделі полягає в удосконаленні способу моделювання визначення моментів сил груп м'язів на поверхні моделі очного яблука. Поставлена задача вирішується тим, що у способі використовують мову високого рівня програмування Delphi 7 і відповідний математичний апарат. Спільними ознаками прототипу та корисної моделі є визначення сферичних координат на моделі, яка являє собою сферу з визначеним радіусом. Корисна модель відрізняється тим, що в комп'ютер вводять дані про тип м'язів, що дає можливість визначити моменти сил цих м'язів. Визначають момент сили м'яза відносно осей декартової системи координат у відповідності до виразів: Mx i Fy i zi Fz i yi ; My i Fx i zi Fz i xi ; Mz i Fx i yi Fy i xi . На ілюстративному матеріалі представлений спосіб розрахунку моментів сил окорухових м'язів на поверхні моделі очного яблука. Спосіб здійснюють наступним чином: запускають файл розрахунку моментів сил окорухових м'язів. В першу чергу вводять у вікно під номером 1 радіус моделі ока в міліметрах. Якщо цього не зробити, не буде здійснений процес розрахунків. Спосіб дозволяє розраховувати момент сили м'яза у точці М та M’ відносно осей тривимірної декартової системи координат. Для цього необхідно встановити на поверхні моделі очного яблука фіксовану точку М, яка має червоний колір. За допомогою колеса маніпулятора типу "миша" обертають модель ока у необхідну позицію. За допомогою лівої клавіші встановлюють точку М на поверхні моделі очного яблука. У вікнах під номером 2, 4, 6 відображають числові дані моменту сили м'яза відносно осей декартової системи координат - OX, OY, OZ відповідно. Для візуального відображення вектора сили тяги встановлюють галочку у вікні 8 і вибирають тип м'яза у вікні під номером 9. Для точки M’ процедура розрахунку аналогічна. У вікнах 3, 5, 7 відображають числові дані моменту сили м'яза відносно осей декартової системи координат. У вікнах 10, 11 отримують вектор сили тяги м'яза та здійснюють його вибір. Всю розраховану інформацію зберігають у базі даних пацієнтів. Технічний результат способу полягає у скороченні часу на проведення досліджень, а відповідно перебування пацієнта під наркозом, точно відображує окорухові структури очного яблука людини. Спосіб розрахунку моментів сил окорухових м'язів на поверхні моделі очного 1 UA 80907 U яблука може використовуватись в офтальмології для підвищення ефективності хірургічних операцій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Спосіб розрахунку моментів сил окорухових м'язів на поверхні моделі очного яблука, який полягає у тому, що визначають сферичні координати на моделі, яка являє собою сферу з визначеним радіусом у відповідності до виразів: x 180 ; arctg z x 180 180 arctg , при z 0; z x 180 при z 0, x 0; 360 arctg z 10 15 20 180 , x 2 z2 де x , y , z - декартові координати; , - сферичні координати сфери, який відрізняється тим, що в комп'ютер вводять дані про тип м'язів, з можливістю визначити моменти сил цих м'язів, визначають момент сили м'яза відносно осей декартової системи координат у відповідності до виразів: Mx i Fy i zi Fz i yi; arctg y My i Fx izi Fz i xi ; Mz i Fx i yi Fy i xi , де Mx i , My i , Mz i - проекції моменту сили м'яза відносно кожної з осей декартової системи координат; Fx i , Fy i , Fz i - проекції сили м'яза відносно кожної з осей декартової системи координат; xi , yi , zi - декартові координати сфери. 2 UA 80907 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for calculating moments of forces of oculomotor muscles on eyeball surface
Автори англійськоюKukharenko Dmytro Volodymyrovych, Yemchenko Viktor Ivanovych, Kirilacha Nataliya Hryhorivna
Назва патенту російськоюСпособ расчета моментов сил глазодвигательных мышц на поверхности модели глазного яблока
Автори російськоюКухаренко Дмитрий Владимирович, Емченко Виктор Иванович, Кирилаха Наталья Григорьевна
МПК / Мітки
МПК: A61B 3/00, G09B 23/28
Мітки: спосіб, моделі, очного, окорухових, моментів, поверхні, сіль, м'язів, розрахунку, яблука
Код посилання
<a href="https://ua.patents.su/5-80907-sposib-rozrakhunku-momentiv-sil-okorukhovikh-myaziv-na-poverkhni-modeli-ochnogo-yabluka.html" target="_blank" rel="follow" title="База патентів України">Спосіб розрахунку моментів сил окорухових м’язів на поверхні моделі очного яблука</a>
Спосіб розрахунку координат об’єктів на поверхні моделі очного яблука
Номер патенту: 37269
Опубліковано: 25.11.2008
Автори: Мосьпан Владислав Олександрович, Кухаренко Дмитро Володимирович, Ємченко Віктор Іванович
МПК: A61B 3/00, G09B 23/00
Мітки: розрахунку, спосіб, координат, об'єктів, яблука, очного, поверхні, моделі
Формула / Реферат:
Спосіб розрахунку координат об'єктів на поверхні моделі очного яблука, який включає визначення сферичних координат на моделі, яка являє собою сферу з визначеним радіусом у відповідності з виразами:,,,де r -...
Спосіб фіксації тканин очного яблука для гістологічних досліджень

Номер патенту: 72364
Опубліковано: 10.08.2012
Автори: Ульянов Вадим Олексійович, Заводна Віра Сергіївна, Уманець Микола Миколайович, Левицький Іван Михайлович
МПК: G09B 23/28
Мітки: досліджень, фіксації, тканин, гістологічних, спосіб, яблука, очного
Формула / Реферат:
Спосіб фіксації тканин очного яблука для гістологічних досліджень шляхом застосування рідини Карнуа, який відрізняється тим, що після видалення очного яблука його занурюють у розчин Карнуа на 15-20 хвилин, потім виконують склеротомію в двох точках на протилежних полюсах очного яблука, інтравітреально вводять 2-3 мл рідини Карнуа, далі очне яблуко знову занурюють у рідину Карнуа на 90 хвилин, і переносять його до абсолютного спирту.
Комплект для проведення кругового пломбування нижче екватора очного яблука “mehran-2″
Номер патенту: 37492
Опубліковано: 25.11.2008
Автор: Мехран Масуднасери
МПК: A61F 9/00
Мітки: екватора, проведення, очного, пломбування, яблука, mehran-2, комплект, кругового
Формула / Реферат:
Комплект для кругового пломбування нижче екватора очного яблука, що складається із силіконової стрічки (пломби), який відрізняється тим, що містить додатково силіконовий фіксатор з двома ребрами, а силіконова стрічка (пломба) має на одному кінці розріз, довжина якого дорівнює ширині другого кінця стрічки, на якому розташований мішечок з чотирма ребрами всередині.
Спосіб формування лунки в опорно-руховій культі у хворих після енуклеації очного яблука
Номер патенту: 46982
Опубліковано: 11.01.2010
Автор: Малецький Анатолій Парфентієвич
Мітки: культі, лунки, формування, опорно-руховий, хворих, енуклеації, спосіб, очного, яблука
Формула / Реферат:
Спосіб формування лунки в опорно-руховій культі у хворих після енуклеації очного яблука, що полягає в радіальному розрізі кон'юнктиви уздовж лімба, відокремлюванні кон'юнктиви від оточуючих тканин, прошиванні та відсіканні від склери прямих екстрабульбарних м'язів, невректомії, видаленні очного яблука, імплантації в порожнину орбіти гомохряща, оберненого консервованою твердою мозковою оболонкою, який відрізняється тим, що перед імплантацією...
Спосіб формування опорно-рухової кукси у хворих після енуклеації очного яблука
Номер патенту: 26145
Опубліковано: 10.09.2007
Автори: Малецький Анатолій Парфентієвич, Чеботарьов Євген Петрович
МПК: A61F 9/007
Мітки: енуклеації, очного, формування, хворих, спосіб, кукси, опорно-рухової, яблука
Формула / Реферат:
Спосіб формування опорно-рухової кукси у хворих після енуклеації очного яблука, що включає радіальний розріз кон’юнктиви уздовж лімба, відокремлювання кон’юнктиви від оточуючих тканин, прошивання та відсікання від склери прямих екстрабульбарних м’язів, невректомію, видалення очного яблука, імплантацію в порожнину орбіти гомохряща, який відрізняється тим, що перед імплантацією гомохрящ обгортають консервованою твердою мозковою оболонкою.
Попередній патент: Препарат для обприскування фруктових дерев
Наступний патент: Спосіб лікування хронічної рецидивуючої кропив’янки комплексними біологічними препаратами