Датчик переміщення
Формула / Реферат
Датчик переміщення, що містить шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на p/2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази, який відрізняється тим, що застосовано додаткову магнітомодуляційну головку, розташовану з протилежного боку шкали та зміщену відносно основної магнітомодуляційної головки на відстань, що дорівнює половині довжини мітки, при цьому додаткову магнітомодуляційну головку через підсилювально-перетворюючий канал, ідентичний основному підсилювально-перетворюючому каналу, підключено до суматора.
Текст
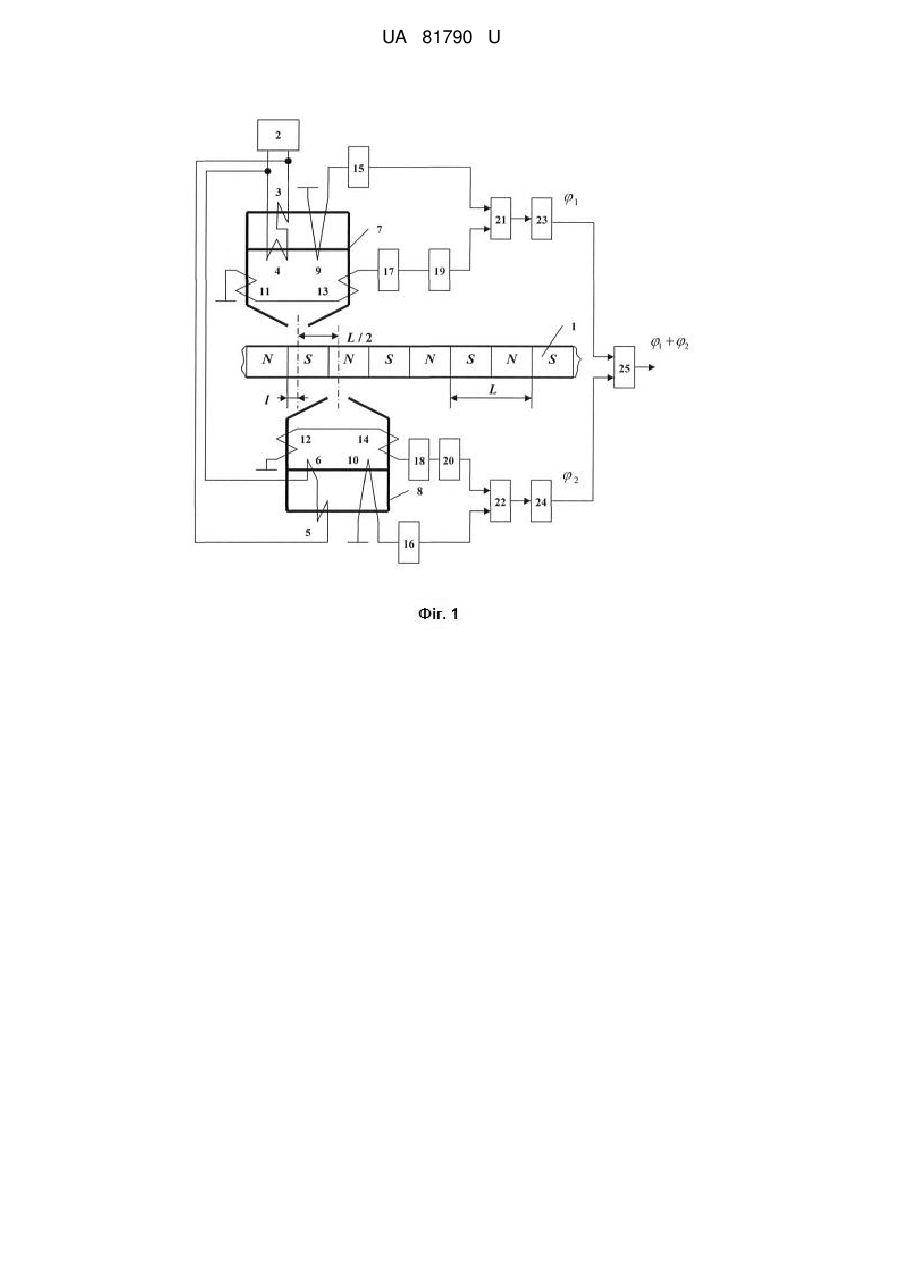
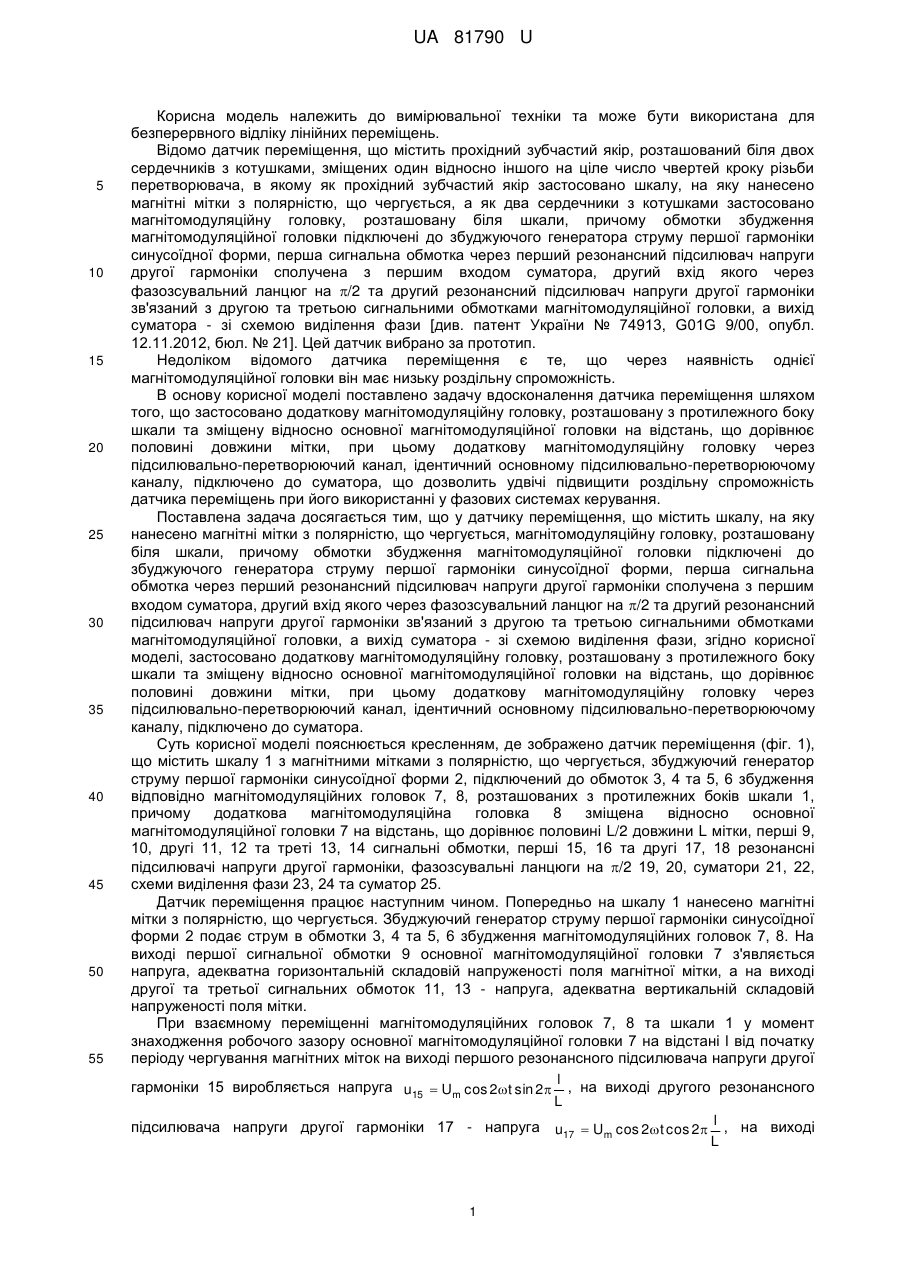
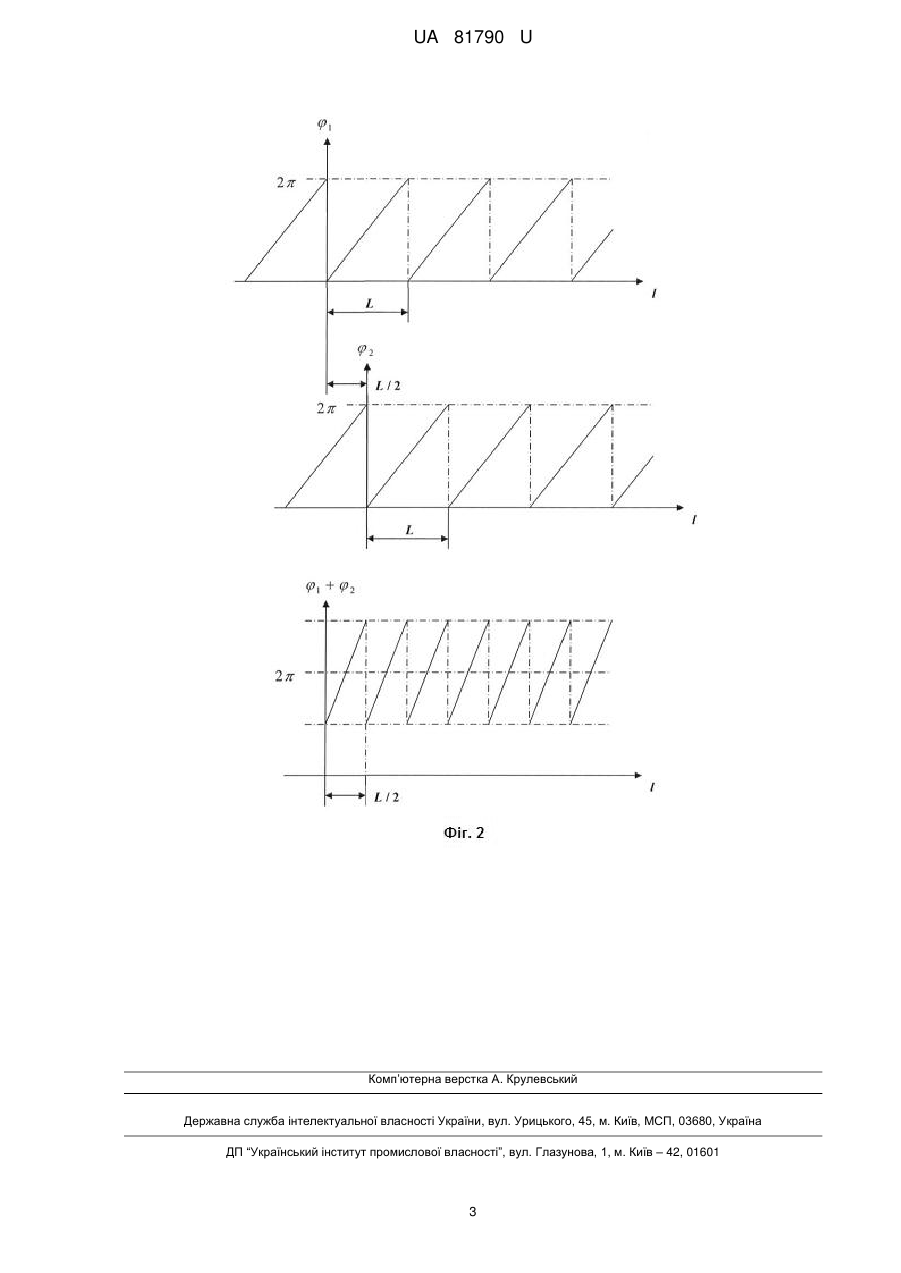
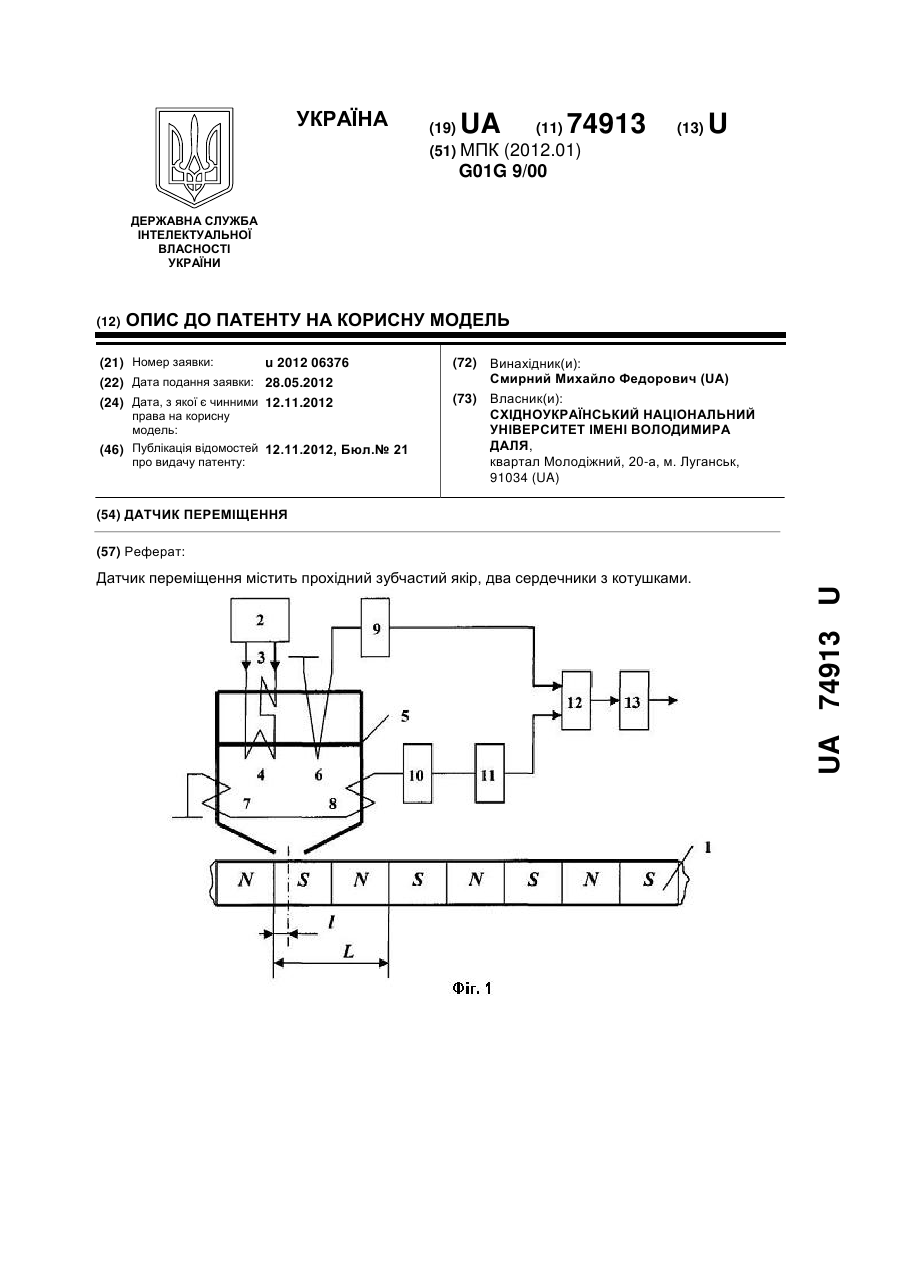
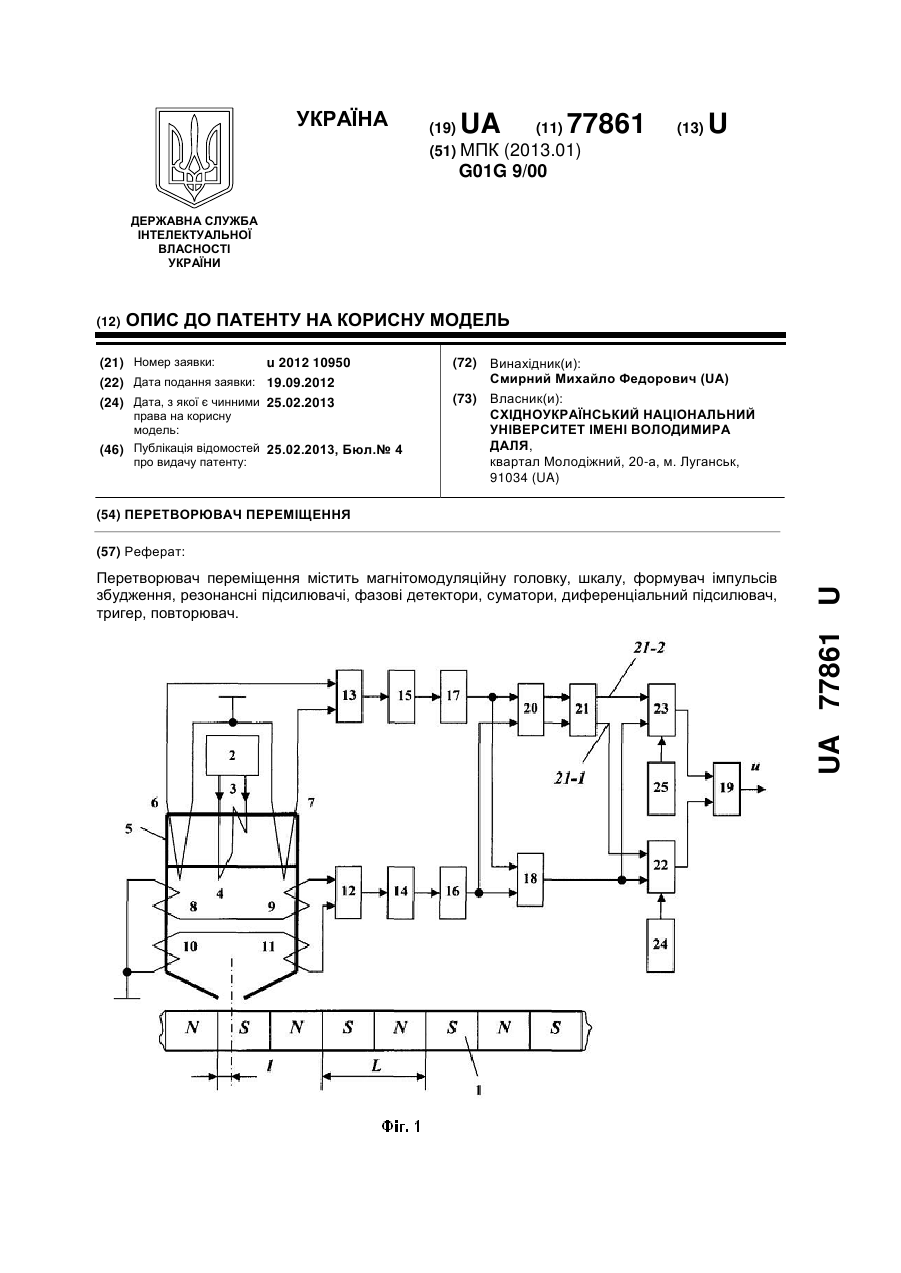
Реферат: UA 81790 U UA 81790 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки та може бути використана для безперервного відліку лінійних переміщень. Відомо датчик переміщення, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, в якому як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на /2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази [див. патент України № 74913, G01G 9/00, опубл. 12.11.2012, бюл. № 21]. Цей датчик вибрано за прототип. Недоліком відомого датчика переміщення є те, що через наявність однієї магнітомодуляційної головки він має низьку роздільну спроможність. В основу корисної моделі поставлено задачу вдосконалення датчика переміщення шляхом того, що застосовано додаткову магнітомодуляційну головку, розташовану з протилежного боку шкали та зміщену відносно основної магнітомодуляційної головки на відстань, що дорівнює половині довжини мітки, при цьому додаткову магнітомодуляційну головку через підсилювально-перетворюючий канал, ідентичний основному підсилювально-перетворюючому каналу, підключено до суматора, що дозволить удвічі підвищити роздільну спроможність датчика переміщень при його використанні у фазових системах керування. Поставлена задача досягається тим, що у датчику переміщення, що містить шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на /2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази, згідно корисної моделі, застосовано додаткову магнітомодуляційну головку, розташовану з протилежного боку шкали та зміщену відносно основної магнітомодуляційної головки на відстань, що дорівнює половині довжини мітки, при цьому додаткову магнітомодуляційну головку через підсилювально-перетворюючий канал, ідентичний основному підсилювально-перетворюючому каналу, підключено до суматора. Суть корисної моделі пояснюється кресленням, де зображено датчик переміщення (фіг. 1), що містить шкалу 1 з магнітними мітками з полярністю, що чергується, збуджуючий генератор струму першої гармоніки синусоїдної форми 2, підключений до обмоток 3, 4 та 5, 6 збудження відповідно магнітомодуляційних головок 7, 8, розташованих з протилежних боків шкали 1, причому додаткова магнітомодуляційна головка 8 зміщена відносно основної магнітомодуляційної головки 7 на відстань, що дорівнює половині L/2 довжини L мітки, перші 9, 10, другі 11, 12 та треті 13, 14 сигнальні обмотки, перші 15, 16 та другі 17, 18 резонансні підсилювачі напруги другої гармоніки, фазозсувальні ланцюги на /2 19, 20, суматори 21, 22, схеми виділення фази 23, 24 та суматор 25. Датчик переміщення працює наступним чином. Попередньо на шкалу 1 нанесено магнітні мітки з полярністю, що чергується. Збуджуючий генератор струму першої гармоніки синусоїдної форми 2 подає струм в обмотки 3, 4 та 5, 6 збудження магнітомодуляційних головок 7, 8. На виході першої сигнальної обмотки 9 основної магнітомодуляційної головки 7 з'являється напруга, адекватна горизонтальній складовій напруженості поля магнітної мітки, а на виході другої та третьої сигнальних обмоток 11, 13 - напруга, адекватна вертикальній складовій напруженості поля мітки. При взаємному переміщенні магнітомодуляційних головок 7, 8 та шкали 1 у момент знаходження робочого зазору основної магнітомодуляційної головки 7 на відстані l від початку періоду чергування магнітних міток на виході першого резонансного підсилювача напруги другої гармоніки 15 виробляється напруга u15 Um cos 2t sin 2 l , на виході другого резонансного L підсилювача напруги другої гармоніки 17 - напруга u17 Um cos 2t cos 2 l , на виході L 1 UA 81790 U фазозсувального ланцюга на /2 19 - напруга u19 Um cos 2t cos 2 l . Вихідним сигналом 2 L суматора 21 є u21 Um sint 1 , де 1 2 l , при цьому схема виділення фази 23 виробляє L лінійну залежність фази 1 l у межах періоду L (епюра 1 , фіг. 2). 5 Аналогічно виробляється сигнал 2 l (епюра 2 , фіг. 2). Сигнали 1 та 2 підсумовуються в суматорі 25, на виході якого сигнал (епюра 1 2 , фіг. 2) має вдвічі вищу роздільну спроможність, ніж у прототипі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Датчик переміщення, що містить шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на /2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази, який відрізняється тим, що застосовано додаткову магнітомодуляційну головку, розташовану з протилежного боку шкали та зміщену відносно основної магнітомодуляційної головки на відстань, що дорівнює половині довжини мітки, при цьому додаткову магнітомодуляційну головку через підсилювально-перетворюючий канал, ідентичний основному підсилювально-перетворюючому каналу, підключено до суматора. 2 UA 81790 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDisplacement motion transducer
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик перемещения
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, переміщення
Код посилання
<a href="https://ua.patents.su/5-81790-datchik-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Датчик переміщення</a>
Датчик переміщення
Номер патенту: 74913
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, переміщення
Формула / Реферат:
Датчик переміщення, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, який відрізняється тим, що як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження...
Перетворювач переміщення
Номер патенту: 77861
Опубліковано: 25.02.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, формувач імпульсів збудження, до якого підключено обмотки збудження магнітомодуляційної головки, спорядженої першою-шостою сигнальними обмотками, який відрізняється тим, що як формувач імпульсів збудження застосовано формувач синусоїдного струму збудження, першу, другу сигнальні обмотки...
Перетворювач переміщення
Номер патенту: 78222
Опубліковано: 11.03.2013
Автор: Смірний Михайло Федорович
МПК: G01B 7/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, формувач імпульсів збудження, до якого підключено обмотки збудження магнітомодуляційної головки, розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференціюючих ланцюгів, зв'язаних з першими входами першого та другого логічних елементів І, другі...
Перетворювач переміщення
Номер патенту: 74868
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить шкалу, магнітомодуляційну головку, розташовану біля шкали, на яку нанесено магнітні мітки з полярністю, що чергується, обмотки збудження магнітомодуляційної головки підключено до формувача імпульсів збудження, її першу та другу, а також третю-шосту сигнальні обмотки, розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до першого та другого диференцюючих ланцюгів, зв'язаних з...
Перетворювач переміщення
Номер патенту: 56824
Опубліковано: 25.01.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить розташовану біля шкали магнітомодуляційну головку, на яку нанесені магнітні мітки з полярністю, що чергується, при цьому обмотки збудження головки підключені до формувача імпульсів збудження, перша та друга сигнальні обмотки - зв'язані з першим тригером, а третя-шоста сигнальні обмотки - з другим тригером, а також містить розпізнавач напрямку руху у складі першого тригера, виходи якого підключені до...
Попередній патент: Перетворювач переміщення
Наступний патент: Спосіб вимірювання мотивації студентів, слухачів до навчання при роботі в інтерактивному комп’ютерному середовищі
Випадковий патент: Пропорційний електромагніт