Датчик переміщення

Формула / Реферат
Датчик переміщення, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, який відрізняється тим, що як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на ![]() та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази.
та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази.
Текст
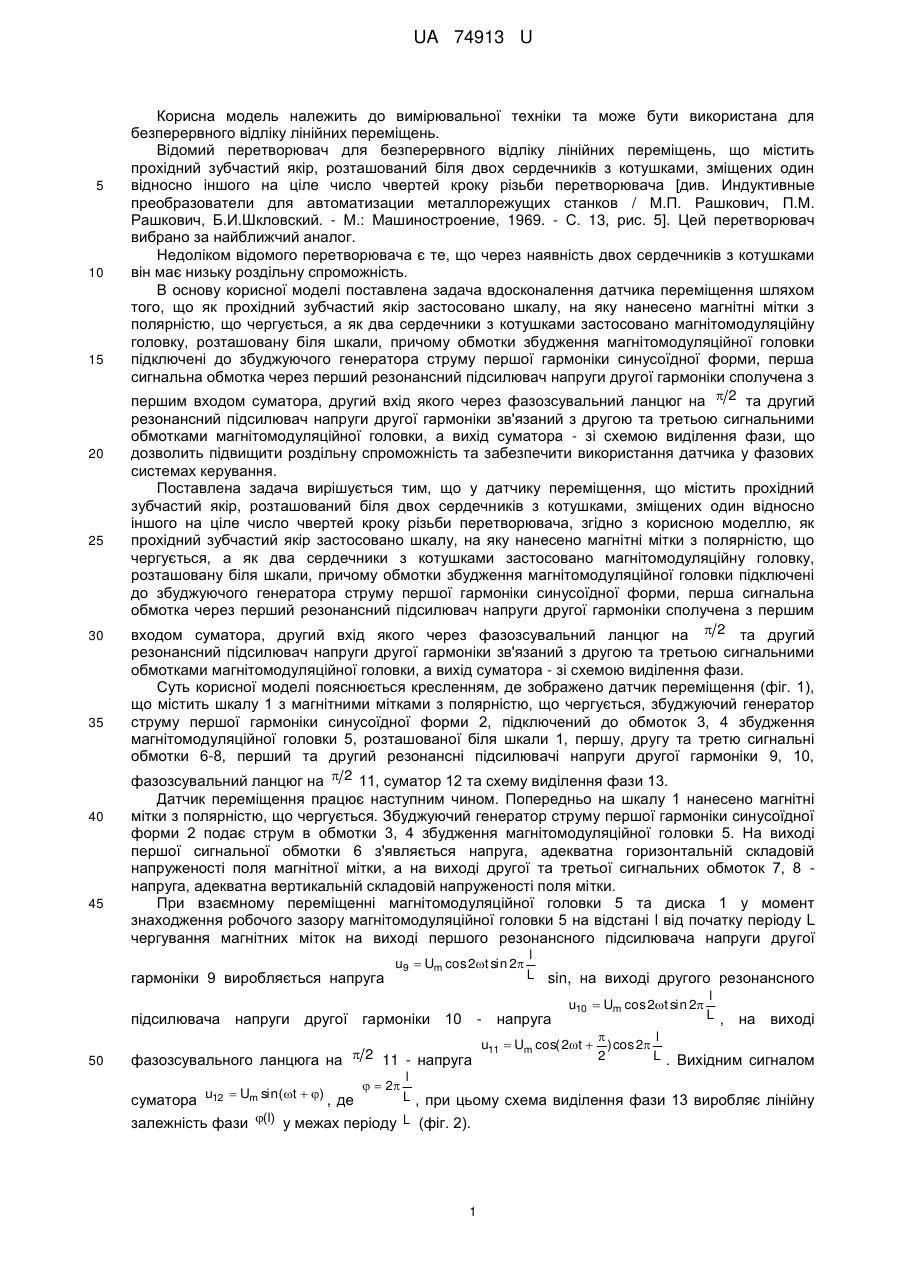
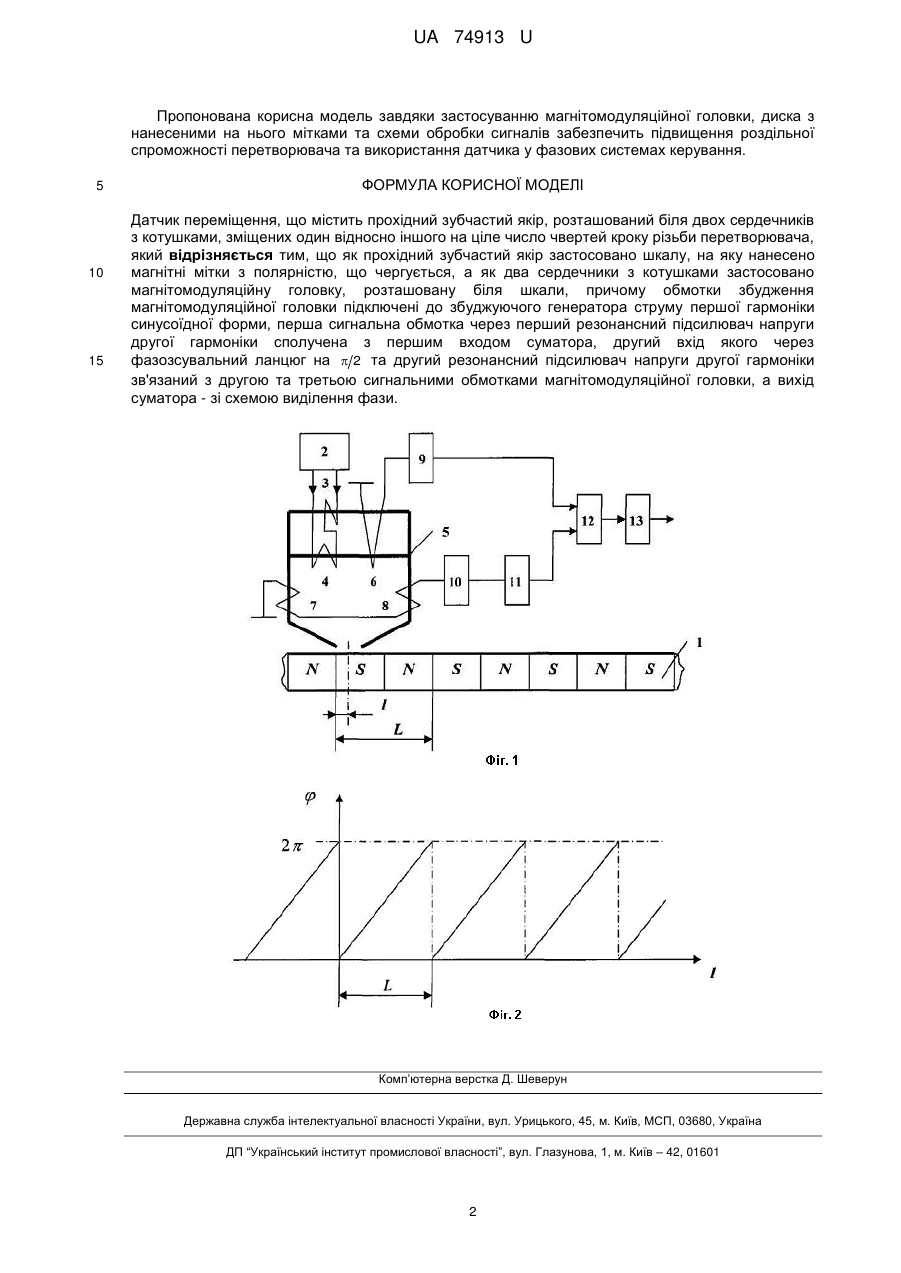
Реферат: UA 74913 U UA 74913 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до вимірювальної техніки та може бути використана для безперервного відліку лінійних переміщень. Відомий перетворювач для безперервного відліку лінійних переміщень, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача [див. Индуктивные преобразователи для автоматизации металлорежущих станков / М.П. Рашкович, П.М. Рашкович, Б.И.Шкловский. - М.: Машиностроение, 1969. - С. 13, рис. 5]. Цей перетворювач вибрано за найближчий аналог. Недоліком відомого перетворювача є те, що через наявність двох сердечників з котушками він має низьку роздільну спроможність. В основу корисної моделі поставлена задача вдосконалення датчика переміщення шляхом того, що як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на 2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази, що дозволить підвищити роздільну спроможність та забезпечити використання датчика у фазових системах керування. Поставлена задача вирішується тим, що у датчику переміщення, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, згідно з корисною моделлю, як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на 2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази. Суть корисної моделі пояснюється кресленням, де зображено датчик переміщення (фіг. 1), що містить шкалу 1 з магнітними мітками з полярністю, що чергується, збуджуючий генератор струму першої гармоніки синусоїдної форми 2, підключений до обмоток 3, 4 збудження магнітомодуляційної головки 5, розташованої біля шкали 1, першу, другу та третю сигнальні обмотки 6-8, перший та другий резонансні підсилювачі напруги другої гармоніки 9, 10, фазозсувальний ланцюг на 2 11, суматор 12 та схему виділення фази 13. Датчик переміщення працює наступним чином. Попередньо на шкалу 1 нанесено магнітні мітки з полярністю, що чергується. Збуджуючий генератор струму першої гармоніки синусоїдної форми 2 подає струм в обмотки 3, 4 збудження магнітомодуляційної головки 5. На виході першої сигнальної обмотки 6 з'являється напруга, адекватна горизонтальній складовій напруженості поля магнітної мітки, а на виході другої та третьої сигнальних обмоток 7, 8 напруга, адекватна вертикальній складовій напруженості поля мітки. При взаємному переміщенні магнітомодуляційної головки 5 та диска 1 у момент знаходження робочого зазору магнітомодуляційної головки 5 на відстані l від початку періоду L чергування магнітних міток на виході першого резонансного підсилювача напруги другої гармоніки 9 виробляється напруга u9 Um cos 2t sin 2 підсилювача напруги другої гармоніки 10 50 l L sin, на виході другого резонансного - напруга фазозсувального ланцюга на 2 11 - напруга u11 u10 Um cos 2t sin 2 l L , на виході l Um cos( 2t ) cos 2 2 L . Вихідним сигналом l L , при цьому схема виділення фази 13 виробляє лінійну суматора , де (l) у межах періоду L (фіг. 2). залежність фази u12 Um sin(t ) 2 1 UA 74913 U Пропонована корисна модель завдяки застосуванню магнітомодуляційної головки, диска з нанесеними на нього мітками та схеми обробки сигналів забезпечить підвищення роздільної спроможності перетворювача та використання датчика у фазових системах керування. 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Датчик переміщення, що містить прохідний зубчастий якір, розташований біля двох сердечників з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, який відрізняється тим, що як прохідний зубчастий якір застосовано шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники з котушками застосовано магнітомодуляційну головку, розташовану біля шкали, причому обмотки збудження магнітомодуляційної головки підключені до збуджуючого генератора струму першої гармоніки синусоїдної форми, перша сигнальна обмотка через перший резонансний підсилювач напруги другої гармоніки сполучена з першим входом суматора, другий вхід якого через фазозсувальний ланцюг на 2 та другий резонансний підсилювач напруги другої гармоніки зв'язаний з другою та третьою сигнальними обмотками магнітомодуляційної головки, а вихід суматора - зі схемою виділення фази. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDisplacement transducer
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик перемещения
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: переміщення, датчик
Код посилання
<a href="https://ua.patents.su/4-74913-datchik-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Датчик переміщення</a>
Перетворювач переміщення
Номер патенту: 74870
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщення, перетворювач
Формула / Реферат:
Перетворювач переміщення, що містить прохідний зубчастий гвинтовий циліндричний якір, розташований між двох сердечників у вигляді гайок з котушками, зміщених один відносно іншого на ціле число чвертей кроку різьби перетворювача, який відрізняється тим, що як прохідний зубчастий гвинтовий циліндричний якір застосовано гвинтову циліндричну шкалу, на яку нанесено магнітні мітки з полярністю, що чергується, а як два сердечники у вигляді гайок з...
Диференціальний індуктивний датчик зусиль
Номер патенту: 56822
Опубліковано: 25.01.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: датчик, індуктивний, диференціальний, зусиль
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованими симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками розміщені на одних осях і через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 61618
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: диференціальний, датчик, індуктивний, зусиль
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Індуктивний датчик
Номер патенту: 74866
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, індуктивний
Формула / Реферат:
Індуктивний датчик, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом...
Індуктивний датчик
Номер патенту: 70988
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: індуктивний, датчик
Формула / Реферат:
Індуктивний датчик, що містить плаский прохідний якір та два магнітопроводи з котушками, який відрізняється тим, що плаский прохідний якір виконано Т-подібної форми, відносно центрального пелюстка якого симетрично розташовано два магнітопроводи з котушками на осях, зміщених від торців прохідного якоря на відстанях, що дорівнюють радіусу магнітопроводу з котушкою, причому магнітопроводи з котушками через підсилювально-перетворювальні канали...
Попередній патент: Пристрій для запобігання буксуванню коліс локомотива
Наступний патент: Пристрій для визначення місцеположення рейкового рухомого об’єкта
Випадковий патент: Пружна муфта