Спосіб квазічастотного пуску асинхронного двигуна та пристрій для його реалізації
Номер патенту: 83342
Опубліковано: 10.07.2008
Автори: Родькін Дмитро Йосипович, Гомілко Володимир Іванович, Гладир Андрій Іванович, Селівоненко Сергій Васильович, Кирічков Анатолій Васильович
Формула / Реферат
1. Спосіб квазічастотного пуску асинхронного двигуна, що полягає в підключенні асинхронного двигуна до трифазної мережі через тиристорний регулятор змінної напруги, збільшенні напруги живлення на клемах двигуна за рахунок зміни кута керування тиристорів до повного їх відкривання, контролі процесу запуску шляхом вимірювання струму та напруги статора з обчисленням ковзання s при повній напрузі на клемах статора, закриванні тиристорного регулятора при важкому пуску з s = 1 та моментом опору технологічного механізму, що перевищує пусковий момент двигуна, обчисленні та заданні інтервалів часу для повторних пробних пусків до досягнення s ¹ 1 при повній напрузі на клемах статора, який відрізняється тим, що при повторних пробних пусках додатково здійснюють живлення статорних кіл двигуна напругою, отриманою шляхом знакозмінного модулювання напруги мережі живлення з частотою модуляції, що дорівнює у відносних одиницях критичному ковзанню двигуна, підвищують пусковий момент двигуна з кожною спробою пуску на фіксоване значення шляхом регулювання співвідношення частоти модуляції та кута відкривання тиристорів, формують імпульсний момент з поступовим його збільшенням до досягнення значення ковзання s ¹ 1 при модульованій напрузі на клемах статора, задають час, впродовж якого ротор асинхронного двигуна обертається в режимі квазічастотного керування з швидкістю обертання, яка визначається вибраною частотою модуляції.
2. Спосіб за п 1, який відрізняється тим, що тривалість режиму квазічастотного керування визначається досягненням заданого кута повороту ротора, значення якого вибирається в залежності від закону руху та конструкції робочого механізму.
3. Пристрій квазічастотного пуску асинхронного двигуна, що містить тиристорний трифазний регулятор напруги, відповідні входи якого підключені до мережі живлення через вимикач, а виходи з'єднані з трифазної обмоткою статора асинхронного двигуна, блок датчиків струму і напруги, виходи якого підключені до програмного пристрою, який містить аналого-цифровий перетворювач, входи якого з'єднані з відповідними виходами блока датчиків, мікропроцесорний модуль, вхід якого з'єднаний з виходом аналого-цифрового перетворювача і систему імпульсно-фазового керування, який відрізняється тим, що до програмного пристрою введений генератор частоти модулювання та розподільник імпульсів, мікропроцесорний модуль має два виходи, один з яких з'єднаний з входом системи імпульсно-фазового керування, інший вихід мікропроцесорного модуля з'єднаний з входом генератора частоти модулювання, виходи системи імпульсно-фазового керування та генератора частоти модулювання підключені до відповідних входів розподільника імпульсів, а вихід останнього підключений до тиристорного трифазного регулятора напруги.
4. Пристрій за п. 3, який відрізняється тим, що пристрій додатково обладнаний датчиком кута повороту ротора, вихід якого з'єднаний з відповідним входом аналого-цифрового перетворювача.
Текст
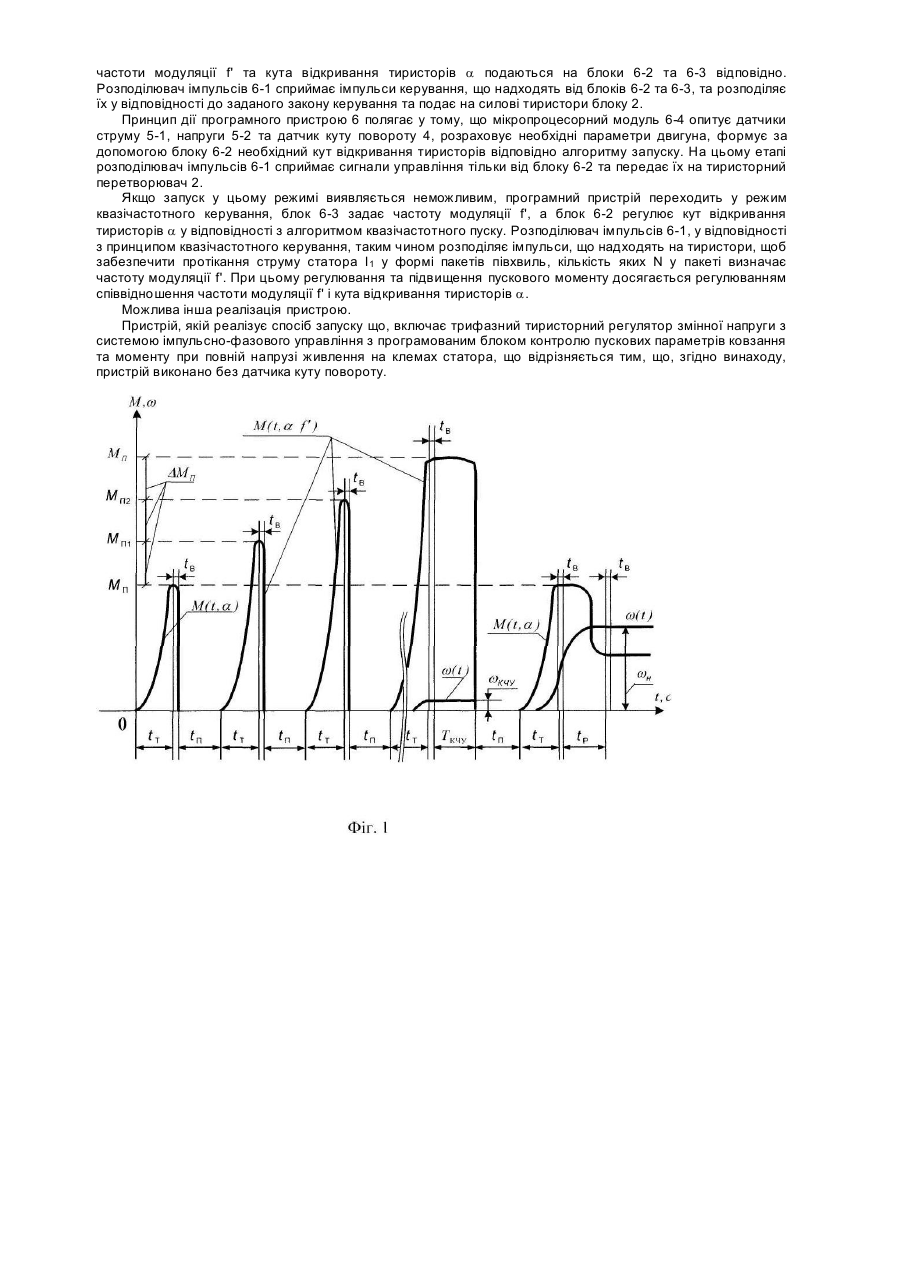
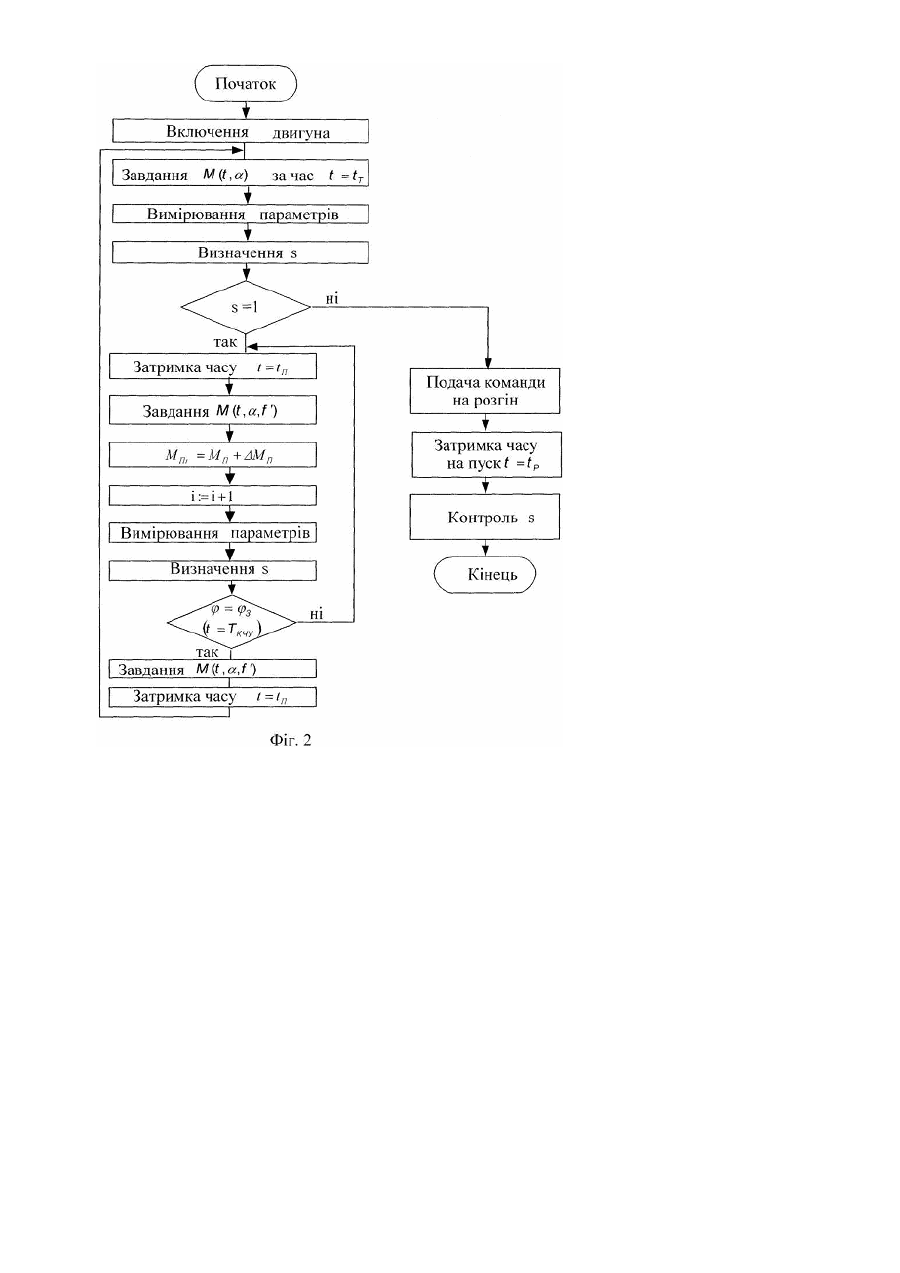
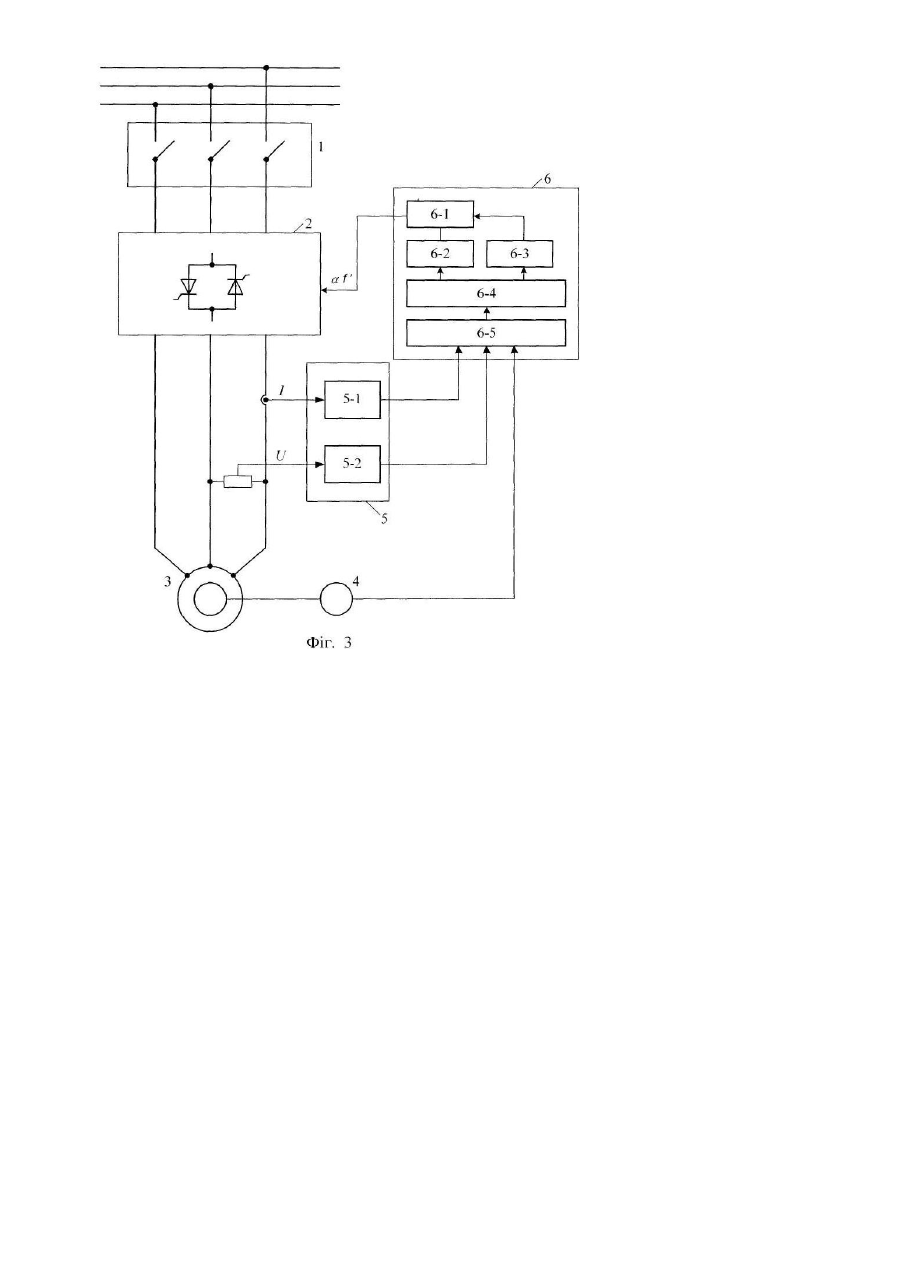
Винахід, що заявляється, відноситься до електротехніки, зокрема до автоматизованого асинхронного електропривода з трифазним тиристорним регулятором у колі статора та може бути використаним для пуску асинхронних двигунів технологічних механізмів при важких умовах рушання. Прикладом важкого рушання є процес запуску артезіанського багатоступінчастого насоса для транспортування нафтопродуктів, зокрема, мазуту, в зимовий період. У випадку зберігання мазуту в резервуарах, його температура поступово зменшується, що призводить до збільшення в'язкості нафтопродукту та унеможливлює прямий пуск привідного двигуна насоса. У цьому разі доводиться знімати частину робочих коліс насоса з метою зменшення моменту опору технологічного механізму. Іншим прикладом є насос для транспортування пульпи руди у відстійник. Досить частою є ситуація, коли запуск насоса відбувається під навантаженням у наслідок того, що робоче колесо насосу заблоковане продуктом транспортування. Така ситуація виникає, коли немає часу на підготовчу операцію, що передує пуску, - спорожнення зумпфу у разі надходження великої кількості пульпи зі збагачувального комбінату. З цієї причини запуск двигуна також можна віднести до класу важких. Відоме технічне рішення - спосіб пуску асинхронного двигуна, що дозволяє отримати підвищені значення пускового моменту [Вешеневский С.Н. Характеристики двигателей в электроприводе. М.:Энергия, 1967. - 472с. (221с.-226с.)]. Спосіб пуску асинхронного двигуна АД здійснюється підключенням його до мережі при повністю введеному зовнішньому опорі у колі ротора. Для підтримки прискорення привода ступенями зменшують величину зовнішнього опору. Коли весь опір буде виведений, двигун перейде на свою природну характеристику. Недоліком способу є ступінчате регулювання пускового моменту та недостатня жорсткість штучних механічних характеристик двигуна, внаслідок чого погіршуються його пускові характеристики. Ще одним недоліком способу є неможливість застосування АД з короткозамкненим ротором. Також відомий спосіб пуску асинхронного двигуна, який здійснюється збільшенням напруги на клеммах статора у функції часу [Петров И.И., Мейстель A.M. Специальные режимы работы асинхронного электропривода. М.:Энергия,1968 (73с.-75с.)]. Недоліком відомого способу є те, що збільшення пускового моменту двигуна відбувається тільки при перевищенні номінального значення напруги живлення, для чого необхідне додаткове обладнання. Найбільш близьким до способу, що заявляється, є, вибраний як прототип, спосіб пуску асинхронного двигуна, який здійснюється шляхом декількох пробних пусків, під час яких обчислюється ковзання та момент, з метою досягнення ковзання s¹0 при повній напрузі на клемах статора [Висновок від 01.12.2003 про видачу деклараційного патенту на винахід за результатами експертизи на локальну новизну від "Спосіб пуску асинхронного двигуна технологічного механізму та пристрій для його реалізації", заявка №20021086610 від 12.03.2003]. Час повторення операцій запуску може вибиратися в залежності від закону руху робочого механізму. Недоліком відомого способу є те, що зруйнування технологічної перешкоди за рахунок кінетичної енергії мас, що рухаються, з точним визначенням моменту подачі наступного імпульсу, тобто, розгойдування, неможливе у разі запуску технологічних механізмів, що не мають у своєму складі активної складової моменту опору, наприклад, скребковий конвеєр, дробарка, насос для транспортування пульпи, мазуту і т.д. Відомий пристрій для пуску асинхронного двигуна, що містить пусковий реостат та контактори для шунтування ступенів реостату [Вешеневский С.Н. Характеристики двигателей в электроприводе. Μ.: Энергия, 1967. - 472с. (221с.-226с.)]. Недоліком пристрою є низькі енергетичні характеристики, обумовлені втратами енергії ковзання та виділенням тепла на пускових реостатах. Інший відомий пристрій для пуску асинхронного двигуна містить тиристорний регулятор напруги з імпульсно-фазовим керуванням [Петров И.И., Мейстель A.M. Специальные режимы работы асинхронного электропривода. М.:Энергия, 1968 (73с.-75с.)]. Недоліком пристрою є те, що при регулюванні кутів управлення тиристорний регулятор забезпечує тільки зменшення пускового моменту двигуна. Також відомий, вибраний як прототип, пристрій для пуску асинхронного двигуна, що включає трифазний тиристорний регулятор змінної напруги та додатково забезпечений програмованим блоком контролю пускових параметрів [Висновок від 01.12.2003 про видачу деклараційного патенту на винахід за результатами експертизи на локальну новизну від "Спосіб пуску асинхронного двигуна технологічного механізму та пристрій для його реалізації", заявка №20021086610, дата подання 12.03.2003]. Недоліком пристрою є те, що при важкому пуску, з метою забезпечення імпульсного характеру моменту двигуна, відбувається регулювання тільки напруги живлення, а отже, неможливе отримання підвищеного пускового моменту двигуна. Метою створення способу пуску та пристрою для його реалізації, що заявляється, є підвищення надійності та працездатності обладнання за рахунок покращення умов рушання та пуску АД технологічних механізмів. Фіг.1 - Діаграма квазічастотного пуску АД технологічного механізму; Фіг.2 - Алгоритм квазічастотного пуску АД технологічного механізму; Фіг.3 - Блок-схема пристрою для реалізації квазічастотного пуску. Принцип квазічастотного керування полягає у живленні статорних кіл двигуна напругою u', отриманою шляхом знакозмінного модулювання напруги мережі живлення. Струм статора l1 складається з пакетів півхвиль, кількість яких N у пакеті визначає переважаючу гармонійну складову й, тим самим, частоту модуляції f', від якої залежить синхронна швидкість обертання двигуна w КЧУ. Підвищення пускового моменту досягається регулюванням співвідношення частоти модуляції f' та кута відкривання тиристорів a. Максимально можливе значення пускового моменту може бути визначене виходячи з того, що критичне ковзання при квазічастотному регулюванні sкpf змінюється обернено пропорційно до частоти модуляції f': sкрf1ном sкр sкр f » = f' kf , де kf=f'/f1ном - коефіцієнт, що враховує зниження частоти модуляції f' основної гармоніки напруги живлення статорних кіл відносно номінальної частоти мережі f 1ном; sкр - критичне ковзання при номінальної частоти мережі f f 1ном. Початковий момент, що розвивається двигуном при пуску, має максимальне значення, коли критичне ковзання рівне одиниці: sкр/kf=1. Тобто, для забезпечення максимального значення пускового моменту необхідно вибрати частоту модуляції, приблизно рівну у відносних одиницях критичному ковзанню двигуна: kf=sкр. Спосіб пуску (Фіг.1-Фіг.2) починається з тестування електромеханічної системи з метою визначення можливості пуску двигуна. Для цього впродовж часу t=tT за допомогою тиристорного регулятора змінної напруги здійснюється регулювання моменту двигуна Μ (t, a), як функції часу t та кута управління a. При закритих тиристорах у час t=0 пусковий момент дорівнює нулю. Зі зменшенням кута управління за час t=tT напруга живлення досягає свого номінального значення, а пусковий момент збільшується до значення, що дорівнює пусковому моменту ΜП при повній напрузі на клемах статора. За цей час може виявитись, що пусковий момент двигуна ΜП перевищує значення моменту опору механізму при рушанні МТ. У цьому випадку зі зменшенням кута а двигун розганяється до заданої швидкості w =w н за час t=tp. Якщо МТ>МП, запуск асинхронного двигуна неможливий. У цьому разі w =0 та s=1, де w - частота обертання ротора, a s ковзання асинхронного двигуна. Програмний пристрій за час t=tB вимірює напругу, струм у фазах статора та визначає відомими способами, з використанням параметрів схеми заміщення, ковзання асинхронного двигуна s, та момент Μ (t, a), що ним розвивається. Якщо s=1, то напругу живлення зменшують до нуля на деякий час паузи t=tП, а програмний пристрій переходить у режим квазічастоного керування з метою підвищення пускового моменту двигуна за рахунок регулювання кута відкривання тиристорів a та частоти модулювання напруги живлення f', таким чином, щоб досягти kf=sкр. Впродовж наступного часу тестування t=t T регулювання моменту двигуна M(t,a,f') відбувається у функцію часу t, кута управління a та частоти модульованої напруги живлення f', що дозволяє підвищити пусковий момент на значення DΜП (МП1= МП+DМП). За час t=tB вдруге вимірюють напругу, струм у фазах статора та визначають ковзання. Якщо ковзання дорівнює s=1, процес запуску повторюють, з подальшим збільшенням пускового моменту двигуна на значення DΜП . Поточне значення спроби пуску і-є відповідає поточному значенню пускового моменту МПі та не перевищує і=k, де к - кількість спроб: МПі=МП+і·DΜП . Імпульсний характер моменту та поступове його збільшення дозволяє зруйнувати технологічну перешкоду, що створена матеріалом в робочій зоні технологічного механізму та зробити можливим процес запуску після декілька послідовних спроб. Параметри tT, tП обираються, таким чином, щоб уникнути резонансних коливань, які можуть мати місце у разі співпадання власних частот коливань електромеханічної системи з частотою пульсацій моменту, що розвиває двигун. Якщо за час наступного виміру t=tB виявиться, що ковзання асинхронного двигуна s¹1, тобто w=w КЧУ, здійснюється завдання куту повороту ротора j3 (або часу обертання ТКЧУ), впродовж якого ротор асинхронного двигуна здійснює обертання зі швидкістю w КЧУ. Кут j3 обирається в залежності від конструктивних та технологічних параметрів механізму з метою найбільш ефективного подолання технологічної перешкоди. Після досягання значення j=j3 (або t=ТКЧУ), де j - поточне значення кута повороту ротора, програмований пристрій здійснює витримку часу t =tП та переходить у режим регулювання моменту двигуна у функції часу t та кута управління a: Μ (t, a). Спосіб пуску полягає в підключенні асинхронного двигуна до трьохфазної мережі через тиристорний регулятор змінної напруги, у збільшенні напруги живлення на клемах двигуна у функції часу за рахунок зміни кута керування тиристорів до повного їх відкривання, у вимірюванні струму та напруги статора, обчисленні ковзання при повній напрузі на клемах статора, що відрізняється тим, що, згідно винаходу, у разі неможливості пуску, алгоритм пуску здійснюється шляхом переходу у режим квазічастотного керування, підвищення пускового моменту двигуна, обчислення ковзання та куту повороту вала у квазічастотному режимі, закривання тиристорного регулятора, завдання часу повторного процесу запуску зі збільшенням значення пускового моменту, повторення пробних пусків з поступовим збільшенням пускового моменту до початку рушання та досягнення заданого куту повороту ротора, повернення у режим запуску шляхом збільшення напруги живлення на клемах двигуна у функції часу за рахунок зміни кута керування тиристорів до повного їх відкривання. Визначення куту повороту ротору вимагає додаткового обладнання, том , з метою спрощення та підвищення надійності, можливий спосіб пуску, що не використовує параметр j3. Спосіб пуску відрізняється тим, що, згідно винаходу, тривалість режиму квазічастотного керування визначається часом, що вибирається в залежності від закону руху робочого механізму. Пристрій, якій реалізує спосіб запуску (Фіг.3), включає трифазний тиристорний регулятор змінної напруги з системою імпульсно-фазового управління з програмованим блоком контролю пускових параметрів ковзання та моменту при повній напрузі живлення на клемах статора, що відрізняється тим, що, згідно винаходу, він додатково обладнаний програмованим блоком з функцією квазічастотного керування, який забезпечує підвищене значення пускового моменту двигуна. Блок-схема пристрою зображена на Фіг.3. На час пуску асинхронний двигун 3 підключено до мережі живлення через тиристорний регулятор напруги 2 за допомогою вимикача 1. Кут повороту вала двигуна контролюється датчиком кута повороту вала двигуна 4. Блок датчиків 5 вимірює струм І та напругу U на обмотках статора двигуна та складається з блоків 5-1 та 5-2 відповідно. Блоки з першого по п'ятий є типовими для систем автоматизованого електроприводу. Програмний пристрій 6 є комплектною мікропроцесорною системою керування вищого функціонального рівня, яка складається з програмної частини, в яку закладено алгоритм запуску двигуна, та апаратної частини. Остання містить аналого-цифровий перетворювач 6-5, мікропроцесорний модуль 6-4, систему імпульсно-фазового керування 6-3, генератор частоти модулювання 6-2, розподілювач імпульсів 6-1. Мікропроцесорний модуль 6-4 сприймає сигнали з виходів датчика кута повороту 4 та блоку датчиків 5 через аналого-цифровий перетворювача 6-5. З виходу мікропроцесорного модуля 6-4 сигнали завдання частоти модуляції f' та кута відкривання тиристорів a подаються на блоки 6-2 та 6-3 відповідно. Розподілювач імпульсів 6-1 сприймає імпульси керування, що надходять від блоків 6-2 та 6-3, та розподіляє їх у відповідності до заданого закону керування та подає на силові тиристори блоку 2. Принцип дії програмного пристрою 6 полягає у тому, що мікропроцесорний модуль 6-4 опитує датчики струму 5-1, напруги 5-2 та датчик куту повороту 4, розраховує необхідні параметри двигуна, формує за допомогою блоку 6-2 необхідний кут відкривання тиристорів відповідно алгоритму запуску. На цьому етапі розподілювач імпульсів 6-1 сприймає сигнали управління тільки від блоку 6-2 та передає їх на тиристорний перетворювач 2. Якщо запуск у цьому режимі виявляється неможливим, програмний пристрій переходить у режим квазічастотного керування, блок 6-3 задає частоту модуляції f', а блок 6-2 регулює кут відкривання тиристорів a у відповідності з алгоритмом квазічастотного пуску. Розподілювач імпульсів 6-1, у відповідності з принципом квазічастотного керування, таким чином розподіляє імпульси, що надходять на тиристори, щоб забезпечити протікання струму статора І 1 у формі пакетів півхвиль, кількість яких N у пакеті визначає частоту модуляції f'. При цьому регулювання та підвищення пускового моменту досягається регулюванням співвідношення частоти модуляції f' і кута відкривання тиристорів a. Можлива інша реалізація пристрою. Пристрій, якій реалізує спосіб запуску що, включає трифазний тиристорний регулятор змінної напруги з системою імпульсно-фазового управління з програмованим блоком контролю пускових параметрів ковзання та моменту при повній напрузі живлення на клемах статора, що відрізняється тим, що, згідно винаходу, пристрій виконано без датчика куту повороту.
ДивитисяДодаткова інформація
Назва патенту англійськоюProcedure for a quasi-frequency mode of an asynchronous motor and a device for its embodiment
Автори англійськоюRodkin Dmytro Yosypovych, Hladyr Andrii Ivanovych, Homilko Volodymyr Ivanovych, Kyrichkov Anatolii Vasyliovych, Selivonenko Serhii Vasyliovych
Назва патенту російськоюСпособ квазичастотного пуска асинхронного двигателя и устройство для его реализации
Автори російськоюРодькин Дмитрий Иосифович, Гладыр Андрей Иванович, Гомилко Владимир Иванович, Киричков Анатолий Васильевич, Селивоненко Сергей Васильевич
МПК / Мітки
МПК: H02P 1/26
Мітки: асинхронного, пристрій, спосіб, реалізації, пуску, двигуна, квазічастотного
Код посилання
<a href="https://ua.patents.su/5-83342-sposib-kvazichastotnogo-pusku-asinkhronnogo-dviguna-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб квазічастотного пуску асинхронного двигуна та пристрій для його реалізації</a>
Спосіб пуску асинхронного двигуна технологічного агрегату та пристрій для його реалізації
Номер патенту: 68479
Опубліковано: 16.08.2004
Автори: Кирічков Анатолій Васильович, Лобанов Володимир Димитрович, Родькін Дмитро Йосипович, Гладир Андрій Іванович, Чорний Олексій Петрович, Гомілко Володимир Іванович
МПК: G01R 31/34
Мітки: асинхронного, двигуна, технологічного, пуску, пристрій, реалізації, спосіб, агрегату
Формула / Реферат:
1. Спосіб пуску асинхронного двигуна, що включає підключення обмоток статора двигуна до трифазної мережі через тиристорний регулятор змінної напруги з системою імпульсно-фазового управління, збільшення напруги живлення на клемах двигуна у функції часу, який відрізняється тим, що процес пуску здійснюється шляхом зміни кута керування тиристорів до повного їх відкривання, вимірювання струму та напруги статора, обчислення ковзання та моменту при...
Пристрій для пуску асинхронного двигуна з короткозамкненим ротором
Номер патенту: 21409
Опубліковано: 15.03.2007
Автори: Некрасов Андрій Вікторович, Донченко Роман Миколайович, Шульга Олег Васильович, Решетняк Анатолій Володимирович
МПК: H02P 1/00
Мітки: короткозамкненим, асинхронного, пристрій, ротором, пуску, двигуна
Формула / Реферат:
Пристрій для пуску асинхронного двигуна з короткозамкненим ротором, який живиться від трифазного індуктивно-ємнісного перетворювача з контролем процесу запуску у функції обертів, який відрізняється тим, що дроселі індуктивно-ємнісного перетворювача оснащені додатковими обмотками, які під час запуску асинхронного двигуна підключаються до мережі живлення.
Пристрій для пуску та живлення асинхронного двигуна
Номер патенту: 8600
Опубліковано: 15.08.2005
Автори: Некрасов Андрій Вікторович, Решетняк Анатолій Володимирович
МПК: H02P 1/00
Мітки: живлення, пуску, двигуна, асинхронного, пристрій
Формула / Реферат:
Пристрій для пуску та живлення асинхронного двигуна з короткозамкненим ротором, який відрізняється тим, що для забезпечення плавності запуску і стабілізації моменту в статичних і динамічних режимах та високого коефіцієнта потужності в номінальному режимі тиристори підключені паралельно дроселям індуктивно-ємнісного перетворювача напруги в струм, які створюють зміну пускового моменту відповідно до вимог технологічного процесу, спочатку -...
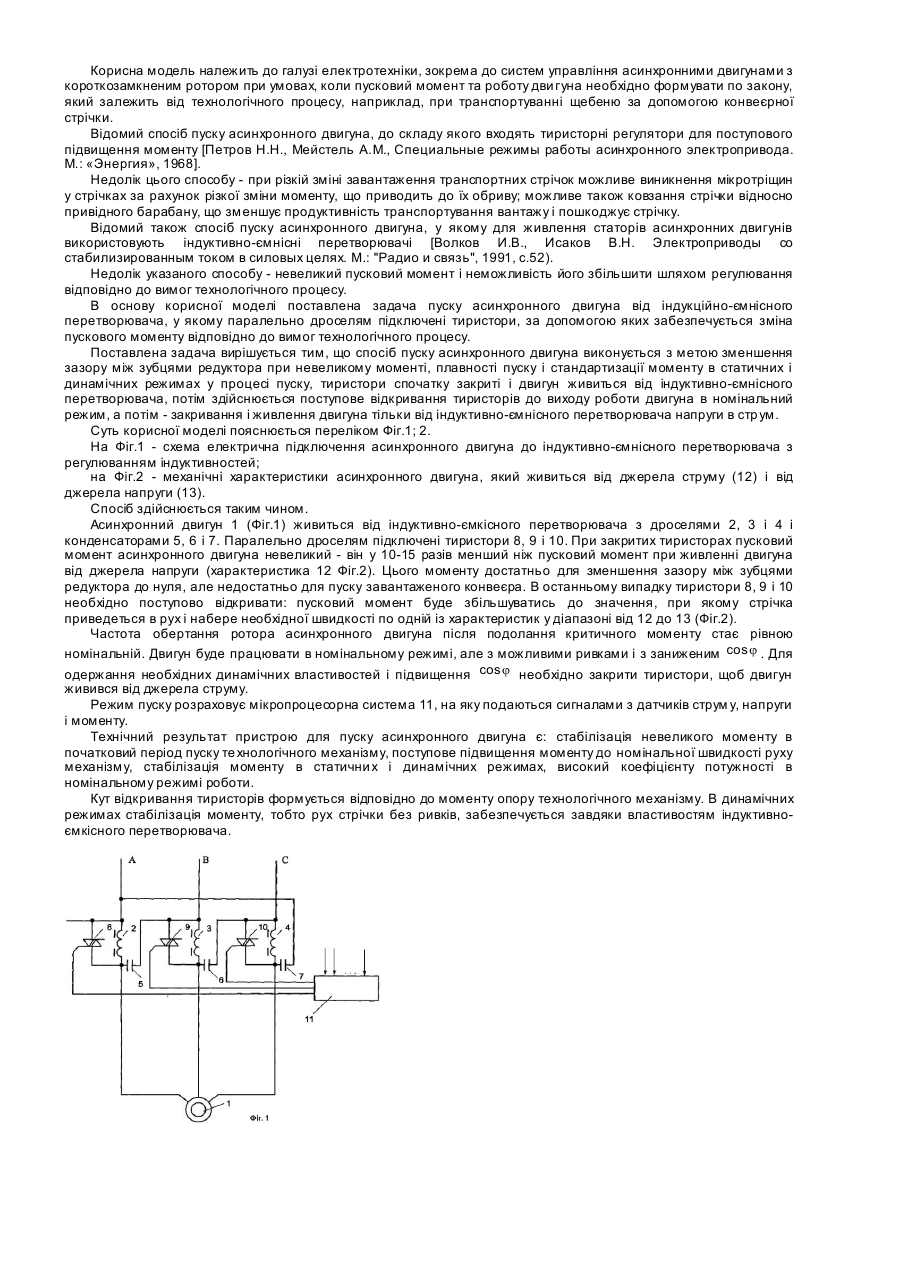
Спосіб пуску асинхронного двигуна при живленні від індуктивно-ємнісного перетворювача з додатковими обмотками дроселя
Номер патенту: 20706
Опубліковано: 15.02.2007
Автори: Решетняк Анатолій Володимирович, Гонтар Віктор Григорович, Некрасов Андрій Вікторович, Соловйов Денис Сергійович
МПК: H02P 1/00
Мітки: спосіб, індуктивно-ємнісного, двигуна, пуску, дроселя, обмотками, додатковими, живленні, асинхронного, перетворювача
Формула / Реферат:
Спосіб пуску асинхронного двигуна при живленні від індуктивно-ємнісного перетворювача з додатковими обмотками дроселя з контролем процесу запуску у функції обертів, який відрізняється тим, що для збільшення пускового моменту дроселі індуктивно-ємнісного перетворювача мають додаткові обмотки, які під час запуску асинхронного двигуна підключаються до мережі живлення, в результаті чого напруга на обмотках статора збільшується на величину,...
Спосіб пуску асинхронного двигуна
Номер патенту: 8075
Опубліковано: 15.07.2005
Автори: Решетняк Анатолій Володимирович, Некрасов Андрій Вікторович
МПК: H02P 1/00
Мітки: спосіб, асинхронного, пуску, двигуна
Формула / Реферат:
Спосіб пуску та живлення асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні обмоток статора двигуна до трифазної мережі через індуктивно-ємнісний перетворювач, у якому паралельно дроселям включені тиристори, і в контролі процесу запуску у функції моменту або струму, який відрізняється тим, що для зменшення зазору між зубцями редуктора при невеликому моменті, плавності пуску і стандартизації моменту в статичних і...
Попередній патент: Біополярні солі транс-каротиноїдів та їх використання
Наступний патент: Пристрій для тривалого зберігання і постачання питною водою
Випадковий патент: Спосіб обробки свердловин підземних сховищ газу