Система стабілізації ракети
Номер патенту: 84650
Опубліковано: 10.11.2008
Автори: Ковальов Борис Олександрович, Ковальов Павло Борисович
Формула / Реферат
1. Система стабілізації ракети, що запускається з пускового контейнера та включає хвостовий відсік і ракетний двигун з днищем та соплом, установлений по осі хвостового відсіку ракети, яка містить множину переважно плоских стабілізаторів, закріплених у шарнірних вузлах на хвостовому відсіку ракети та складених усередині хвостового відсіку навколо і у напрямку сопла, осі, навколо яких стабілізатори обертаються, привід розгортання стабілізаторів та пружинний механізм, що утримує стабілізатори в розгорнутому положенні, при цьому множина стабілізаторів є визначеною, яка відрізняється тим, що кожний стабілізатор виконаний в плані за формою багатокутника, який вписаний в півколо з центром на нижньому шпангоуті корпусу хвостового відсіку дотично до поверхонь нижнього днища ракетного двигуна і сопла, та обмежений поверхнями корпусу хвостового відсіку і сопла, при цьому кожний привід розгортання стабілізатора і пружинний механізм, що утримує стабілізатор в розгорнутому положенні, виконані як суцільна двостороння пружина крутіння, симетрична відносно площини симетрії стабілізатора і закріплена кінцівками на шарнірному вузлі та замкнена через подовжений виток у формі водила із можливістю його взаємодії із кореневою хордою стабілізатора та обертання навколо осі шарнірного вузла, яка проходить через центр вказаного півкола, а множина стабілізаторів містить більше ніж шістнадцять стабілізаторів.
2. Система стабілізації ракети за п. 1, яка відрізняється тим, що кожний стабілізатор оснащений поперечним оперенням, причому поперечне оперення стабілізаторів на парах сусідніх стабілізаторів розміщене, наприклад, на різних рівнях або під різними кутами.
3. Система стабілізації ракети за п. 1, яка відрізняється тим, що є неповністю симетричною навколо сопла, установленого осторонь від осі хвостового відсіку ракети, причому стабілізатори виконані однаковими попарно відносно площини, що проходить через осі хвостового відсіку ракети та сопла.
Текст
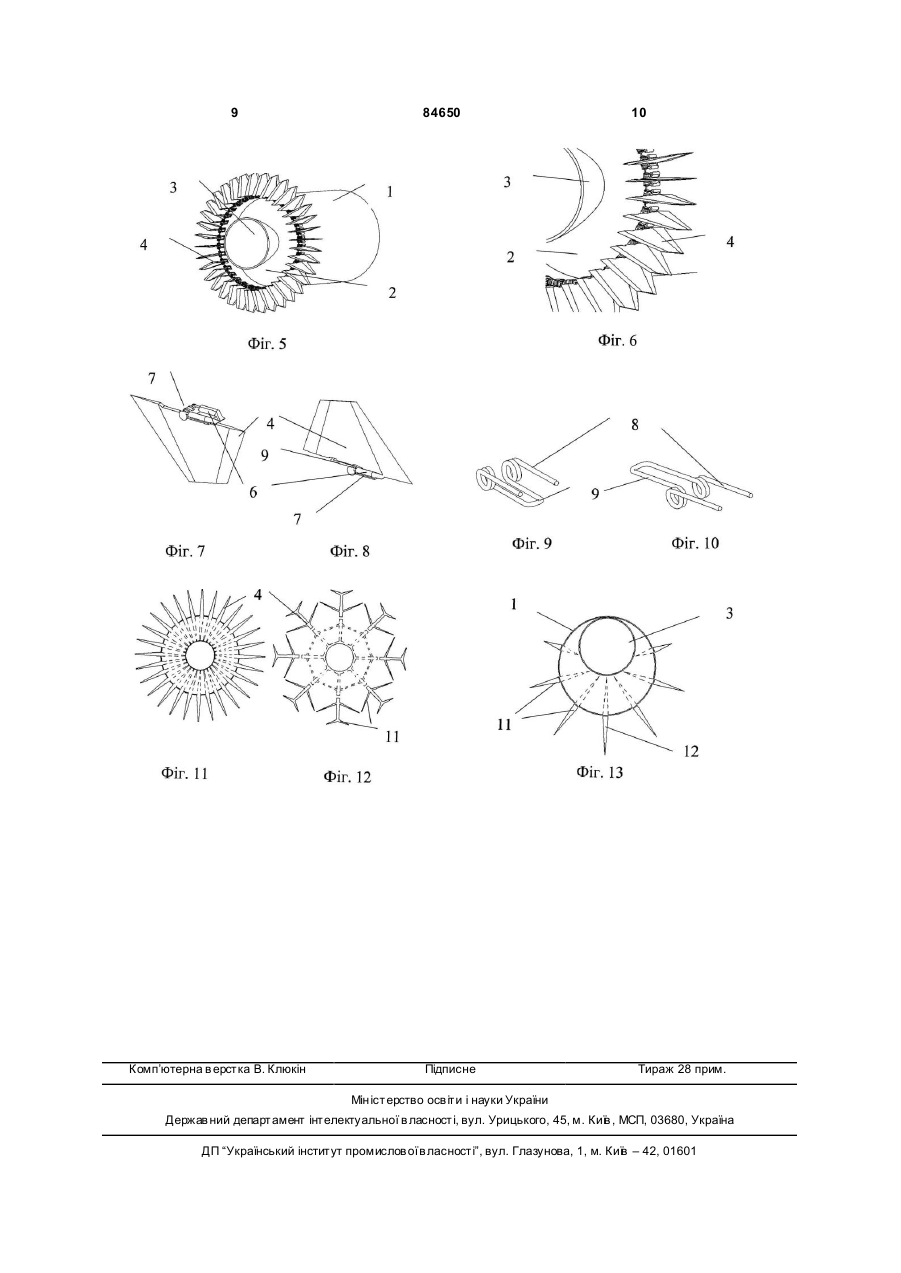
1. Система стабілізації ракети, що запускається з пускового контейнера та включає хвостовий відсік і ракетний двигун з днищем та соплом, установлений по осі хвостового відсіку ракети, яка містить множину переважно плоских стабілізаторів, закріплених у шарнірних вузлах на хвостовому відсіку ракети та складених усередині хвостового відсіку навколо і у напрямку сопла, осі, навколо яких стабілізатори обертаються, привід розгортання стабілізаторів та пружинний механізм, що утримує стабілізатори в розгорнутому положенні, при C2 2 (19) 1 3 84650 Попередні спроби уникнути цих недоліків засновані на компромісі між довжиною і шириною стабілізаторів, що найчастіше невигідно впливає на дальність польоту через нестабільність снаряда [3]. Інші підходи ґрунтувалися на укладанні стабілізаторів уздовж бічної поверхні снаряда, що дуже обмежує ефективність стабілізаторів для стабілізації снаряда [4, 5, 6]. Ще один підхід заснований на використанні гнучких або вигнутих пластин, що укладені навколо снаряда [1, 7]. Гнучкість або зігнутість цих стабілізаторів обмежує їхню здатність стабілізувати снаряд. Ще один очевидний підхід полягає в тому, щоб знизити вантажомісткість ракети або снаряда, що є також очевидно небажаним. Саме тому такі технічні рішення не є ефективними, оскільки їх конструкції потребують досить великого простору для розміщення й стабілізаторів, й приводів, що їх розгортають. Найближчою до запропонованого технічного рішення є система стабілізації ракети, що описана у патенті США 6695252 [8], яка обрана у якості прототипу. В патенті представлена хвостова частина снаряда, що включає газогенератор (ракетний двигун) із пристроєм відбору газу, установлений навколо осі хвостового відсіку, множину переважно плоских стабілізаторів, складених усередині хвостового відсіку навколо газогенератора, причому стабілізатори в складеному положенні нахилені щодо осі хвостового відсіку, причому у хвостовому відсіку виконані пази, у яких стабілізатори розміщені в складеному положенні, а самі стабілізатори улаштовані таким чином, щоб розгорнутися протягом польоту снаряда так, щоб вісь хвостового відсіку лежала в площині кожного стабілізатора або (варіант) не лежала в площинах стабілізаторів після їхнього розгортання. Хвостова частина снаряда включає шарнірні вузли у вигляді шти фтів, навколо яких стабілізатори обертаються при розгортанні, причому штифти виконані як виступи на стабілізаторі, а штифтам відповідають витягнуті наскрізні отвори в хвостовому відсіку, що включають вісь штифта стабілізатора, а стабілізатори функціонально виконані так, щоб обертатися в площини, що включає вісь штифта. Відсік обладнано засувками у вигляді пружинного стопорного механізму, що утримують стабілізатори в розгорнутому положенні. Передбачається, що площини стабілізаторів можуть бути зміщені щодо осі хвостового відсіку і паралельні їй у складеному положенні стабілізаторів усередині хвостового відсіку , а множина стабілізаторів включає осім стабілізаторів. Недоліками такого технічного рішення є необхідність розрізання конструкції хвостового відсіку та завеликі габарити пазів для розміщення стабілізаторів у складеному положенні, які забирають простір, котрий можливо використати для підвищення ефективності системи, а також могутні пристрої для розгортання стабілізаторів вперед, або 4 амортизації удару гальмування при їх розгортанні назад. Треба брати до уваги, що метою створення системи стабілізації є забезпечення її ефективності саме як системи. З огляду на це треба відмітити, що заявлена у прототипі кількість стабілізаторів оптимальна лише для систем, побудованих на принципі обгортання стабілізаторами корпусу ракети без перекриття (Фіг.1, крива а). Для систем стабілізації, що використовують внутрішній простір хвостового відсіку, суттєво важливим є використання саме внутрішнього простору, тобто мінімальна величина додаткових конструкцій, що забирають поперечний габарит по окружності хвостового відсіку при розташуванні стабілізаторів. Це означає можливість підвищення ефективності усієї системи стабілізації, збільшуючи кількість стабілізаторів при меншій ефективності кожного з них (Фіг.1, крива b). В основу винаходу поставлена задача удосконалення конструкції системи стабілізації таким чином, щоб підвищити її ефективність в цілому за рахунок іншої форми стабілізаторів, взаємного розташування елементів системи стабілізації та їх взаємодії, а саме: - виконання кожного стабілізатора в плані в формі багатокутника, що вписаний в півколо з центром на нижньому шпангоуті корпусу хвостового відсіку, дотичне до поверхонь нижнього днища ракетного двигуна і сопла, та обмеженого поверхнями корпусу хвостово го відсіку і сопла, - створення найефективнішій просторової структури системи стабілізації за рахунок оснащення кожного стабілізатора поперечним оперенням, - застосування єдиної можливої кінематичної схеми розгортання стабілізатора під дією сил інерції, яка практично не потребує витрат енергії на його поворот при розгортанні (на кшталт маятника), а енергія приводу потрібна в основному на подолання тертя в шарнірному вузлі та забезпечення потрібних кінематичних та часових параметрів розгортання стабілізаторів, - привод розгортання стабілізаторів і пружинний механізм, що утримує стабілізатори в розгорнутому положенні, виконано як суцільну двосторонню пружину крутіння, симетричну відносно осі симетрії стабілізатора, закріплену кінцівками на шарнірному вузлі та замкнену через подовжений виток у формі водила зі спроможністю його взаємодії із кореневою хордою стабілізатора, - множина стабілізаторів складає більше ніж шістнадцять стабілізаторів. Поставлена задача вирішується таким чином, що в запропонованій конструкції системи стабілізації кожний стабілізатор виконано в плані в формі багатокутника, що вписаний в півколо з центром на нижньому шпангоуті корпусу хвостового відсіку, дотичне до поверхонь нижнього днища ракетного двигуна і сопла, та обмеженого поверхнями корпусу хвостового відсіку і сопла, привод розгортання стабілізаторів і пружинний механізм, що утримує стабілізатори в розгорнутому положенні виконано як суцільну двосторонню пружину крутіння, симетричну відносно площини симетрії стабілізатора, 5 84650 закріплену кінцівками на шарнірному вузлі та замкнену через подовжений виток у формі водила із спроможністю його взаємодії із кореневою хордою стабілізатора та обертання навколо осі шарнірного вузла, яка проходить через центр вказаного півкола, а множина стабілізаторів містить більше ніж шістнадцять стабілізаторів. Втім, запропонованій схемі системи стабілізації і тільки їй властива можливість забезпечити гранично щільне компонування стабілізаторів. Ще одна властивість запропонованої схеми системи стабілізації, що пов'язана із теоретичною відсутністю витрат енергії на обертання стабілізатора (схема маятника), створює суттєві передумови для оптимізації параметрів ефективності ракети (снаряду) в цілому, включаючи її конструктивні параметри, зокрема, довжини хвостового відсіку, форми нижнього днища, форми та вильоту сопла, тощо, а також проектних параметрів, наприклад, тиску в камері згоряння ракетного двигуна. Особливо вагомі результати така оптимізація може дати при створенні керованих у польоті ракет (снарядів). Якщо щільне компонування не можна або недоцільно, за будь-яких причин, забезпечувати, то схема за винаходом відкриває ще один шлях підвищення ефективності системи стабілізації - за рахунок використання вільного поперечного габариту на створення поперечного оперення. При цьому поперечне оперення стабілізаторів на сусідніх парах стабілізаторів може бути розміщено на різних рівнях. Траєкторія польоту ракети проходить здебільшого під кутом атаки і це корисно, наприклад, для підвищення дальності польоту. При цьому деяка кількість стабілізаторів знаходиться в аеродинамічній тіні й не додає ефективності системі в цілому. З огляду на це доцільно вивільнити деякий простір для збільшення площини стабілізаторів, що може бути досягнуто за рахунок зміщення сопла в бік систематичної складовій кута атаки та неповністю симетричного виконання та розміщення стабілізаторів. Для пояснення запропонованої конструкції системи стабілізації додаються креслення та її детальний опис. На кресленнях зображено: На Фіг.1 - Діаграма ефективності (у відсотках) варіантів системи стабілізації в залежності від кількості стабілізаторів крива а для стабілізаторів, що у складеному стані без перекриття обгортають корпус ракети, крива b для стабілізаторів, що у складеному стані розміщуються всередині корпусу ракети; крива с для стабілізаторів з поперечним оперенням; На Фіг.2 - Геометрична схема стабілізатора у складеному стані; На Фіг.3 - Загальний вид системи стабілізації в складеному стані; На Фіг.4 - Деталізований вид системи стабілізації в складеному стані; На Фіг.5 - Загальний вид системи стабілізації в розгорнутому стані; На Фіг.6 - Деталізований вид системи стабілізації в розгорнутому стані; 6 На Фіг.7 - Вид одиночного стабілізатора у складеному стані; На Фіг.8 - Вид одиночного стабілізатора у розгорнутому стані; На Фіг.9 - Вид привода розгортання стабілізатора у складеному стані; На Фіг.10 - Вид привода розгортання стабілізатора у розгорнутому стані; На Фіг.11 - Схема гранично щільного компонування стабілізаторів; На Фіг.12 - Схеми стабілізаторів з поперечним оперенням в різних рівнях та напрямах; На Фіг.13 - Схема неповністю симетричної системи стабілізації. З геометричної точки зору (Фіг.2) стабілізатор 4 в плані представляє собою багатокутник, що вписаний в півколо 5 з центром 5' на нижньому шпангоуті корпусу хвостового відсіку 1, дотичне до поверхонь нижнього днища 2 ракетного двигуна і сопла 3, та обмежений поверхнями корпусу хвостового відсіку 1 і сопла 3. При обертанні навколо центра 5' півкола 5 стабілізатор 4 такої форми без перешкод пройде мимо днища 2 і сопла 3 за зовнішній обвід корпусу хвостового відсіку 1. Система стабілізації ракети у складеному положенні (Фіг.3, 4) складається з множини стабілізаторів 4, які розміщені в просторі між корпусом хвостового відсіку 1, поверхнями нижнього днища 2 і сопла 3. Система стабілізації ракети у робочому положенні (Фіг.5, 6) складається з множини стабілізаторів 4, які виведені за межі корпусу хвостового відсіку 1 при обертанні кожного з них поміж поверхні нижнього днища 2 і поверхні сопла 3. Кожний з стабілізаторів 4 змонтовано на шарнірному вузлі б сумісно із приводом 7 як єдину збірку (Фіг.7, 8). Привод 7 (Фіг.9, 10) виконано як суцільну двосторонню пружину крутіння, симетричну відносно площини симетрії стабілізатора, закріплену кінцівками 8 на шарнірному вузлі 6 та замкнену через подовжений виток у формі водила 9 із спроможністю його взаємодії із кореневою хордою стабілізатора 4. При цьому вісь пружини приводу 7 співпадає з віссю обертання стабілізатора 4 в шарнірному вузлі 6. Таке компонування стабілізатору 4 з шарнірним вузлом 6 і приводом 7 дозволяє гранично мінімізувати поперечний габарит конструкції, пов'язаної з розміщенням стабілізаторів і розмістити найбільшу можливу кількість стабілізаторів. Привод 7 в складеному стані (Фіг.9) знаходиться в положенні, коли кінцівки 8 пружини приводу 7 і водило 9 направлені в один бік, а при розгортанні стабілізатора 4 водило 9 направлено в протилежний бік відносно кінцівок 8 пружини приводу 7 (Фіг.10). Геометричне компонування системи стабілізації (Фіг.2) дозволяє наочно уявити, як можуть бути змінені параметри стабілізатора за рахунок іншої форми стабілізатора 4, днища 2 і сопла 3. Так, вочевидь, можливо виконання стабілізатора 4 з задньою частиною, що повністю повторює контур кола 5, без традиційних кінцевої хорди та задньої кромки із, наприклад, ромбовидним профілем. 7 84650 Як видно з графіків 1 і 2 Фіг.1, запропонована схема (крива b) перевищує традиційну схему (крива а) починаючи з кількості в 16 стабілізаторів, що заявляється як одна з ключових ознак винаходу. При забезпеченні гранично щільного компонування стабілізаторів (Фіг.11) стабілізатори 4 в складеному стані можуть бути встановлені майже впритул один до одного. Після розкриття вони розходяться і забезпечують спрямоване проходження потоку повітря між ними, що й спричиняє стабілізуючий ефект. Підвищення ефективності системи стабілізації за рахунок використання вільного поперечного габариту досягається встановленням на кінцях стабілізаторів 4 поперечного оперення 10 (Фіг.12). При цьому поперечне оперення 10 стабілізаторів 4 на парах сусідніх стабілізаторів може бути розміщено у різних рівнях, або під кутом. Оцінка відносній ефективності такої схеми наведена на Фіг.1, крива с. Несиметрична система стабілізації (схема Фіг.13) розміщується в просторі хвостового відсіку 1 при зміщенні сопла 3 ближче до його корпусу. 8 При цьому стабілізатори мають попарно відносно вертикальній площини однакову висоту (стабілізатори 11), а при непарній кількості стабілізаторів самий великий стабілізатор є єдиним (стабілізатор 12). Джерела інформації: 1. С.В.Гуров. Реактивные системы залпового огня. Изд. 1, Тула, Издательский дом «Пересвет», 2006г. - 432с, ISBN 5-86714-282-5 2. Патент США 3598345 від 10.08.1971, МПК F42B13/32 3. Патент США 3880383 від 29.04.1975, МПК F42B13/32 4. Патент США 4209147 від 24.06.1980, МПК F42B13/32 5. Патент США 5108051 від 28.04.1992, МПК F42B10/14 6. Патент США 6168 111 від 02.01.2001, МПК F42B10/14 7. Патент Європи ЕР1321737 від 25.06.2003, МПК F42B10/14 8. Патент США 6695252 від 24.02.2004, МПК F42B13/32. 9 Комп’ютерна в ерстка В. Клюкін 84650 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for rocket stabilization
Автори англійськоюKovaliov Borys Oleksandrovych, Kovaliov Pavlo Borysovych
Назва патенту російськоюСистема стабилизации ракеты
Автори російськоюКовалев Борис Александрович, Ковалев Павел Борисович
МПК / Мітки
МПК: F42B 10/00
Мітки: ракети, система, стабілізації
Код посилання
<a href="https://ua.patents.su/5-84650-sistema-stabilizaci-raketi.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації ракети</a>
Транспортно-пусковий контейнер ракети

Номер патенту: 69106
Опубліковано: 16.08.2004
Автори: Резниченко Юрій Тимофійович, Старчеус Василь Ігнатович, Дробахін Олег Іванович, Мокін Олександр Васильович, Єрофеєв Євген Олексійович, Мокін Андрій Олександрович
Мітки: контейнер, ракети, транспортно-пусковий
Формула / Реферат:
1. Транспортно-пусковий контейнер ракети, що містить корпус, нижнє днище котрого утворює з верхнім днищем задонний об'єм, підключені до задонного об'єму порохові акумулятори тиску, циліндричний піддон для кріплення ракети на верхньому днищі, шарнірно закріплену на корпусі верхню кришку з пневмоприводом її повороту, кільцеві опори ракети, у якої зовнішній діаметр хвостового відсіку менший зовнішнього діаметра паливного відсіку, вузли кріплення...
Ступінь ракети багаторазового використання
Номер патенту: 3747
Опубліковано: 15.12.2004
Автори: Коваленко Борис Якович, Мокін Андрій Олександрович, Шевцов Анатолій Іванович, Глауберман Михайло Семенович, Мокін Олександр Васильович, Макаров Олександр Леонідович
МПК: F42B 15/00, B64G 1/00
Мітки: використання, ступінь, ракети, багаторазового
Формула / Реферат:
1. Ступінь ракети багаторазового використання, що містить корпус з баками, рушійну установку, перехідний відсік, виконаний у вигляді поворотних панелей з приводом, гнучку оболонку з вузлами кріплення, з'єднану за допомогою трубопроводу і клапана з ємністю тиску, та парашутну систему, який відрізняється тим, що привід виконаний у вигляді гнучкої оболонки тороподібної форми, яка встановлена на корпусі співвісно і з'єднана з вільними кінцями...
Спосіб пуску ракети та ракета для здійснення способу
Номер патенту: 46652
Опубліковано: 15.05.2002
Автори: Мокін Олександр Васильович, Нежований Євген Петрович, Агарков Анатолій Васильович, Федоров Володимир Миколайович
МПК: B64G 1/00
Мітки: способу, пуску, ракети, здійснення, ракета, спосіб
Формула / Реферат:
1. Спосіб пуску ракети, що включає встановлення ракети на пусковий стіл, подавання інертного стисненого газу у заправну магістраль ракети від наземної системи газопостачання до запускання двигуна ракети, сполучення джерела інертного стисненого газу з ємністю з вогнегасильним складом, подавання вогнегасильного складу через сопла-розпилювачі у внутрішню порожнину хвостового відсіку з двигуном та його агрегатами, запускання двигуна ракети і її...
Спосіб забезпечення старту ракети на початковій ділянці траєкторії
Номер патенту: 36668
Опубліковано: 10.11.2008
Автори: Азанов Ілля Борисович, Лопота Віталій Олександрович, Бондар Михайло Анатолійович, Романов Юрко Олександрович, Мокін Олександр Васильович, Мокін Андрій Олександрович
Мітки: старту, траєкторії, ділянці, початковій, спосіб, ракети, забезпечення
Формула / Реферат:
Спосіб забезпечення старту ракети на початковій ділянці траєкторії, який базується на тому, що стабілізацію ракети на ділянці виходу за межі габаритних точок стартової споруди здійснюють відносно максимально виступаючої точки її хвостової частини, після чого ракету стабілізують відносно її центра мас, який відрізняється тим, що ракету додатково стабілізують відносно проекції габаритної точки стартової споруди на бічну поверхню ракети,...
Система електроживлення з захистом
Номер патенту: 20872
Опубліковано: 15.02.2007
Автори: Романов Юрій Іванович, Ніколенко Сергій Іванович
МПК: G05F 1/56
Мітки: захистом, електроживлення, система
Формула / Реферат:
Система електроживлення з захистом, що містить принаймні два послідовно з'єднаних стабілізатори напруги, кожний з яких складається з послідовно включених у силову шину регулюючого елемента і датчика струму шунтованого колом база-емітер захисного транзистора, колектор якого з'єднаний з базою регулюючого транзистора, яка відрізняється тим, що до вихідних виводів кожного зі стабілізаторів підключений захисний діод, катодом - до позитивної, а...
Попередній патент: 1-[4-(1-адамантил)-фенокси]-3-[n-бензил, n-метил(циклогексил)амоній]-2-пропанол хлорид
Наступний патент: Радіометричний спосіб надлишкових вимірювань радіояскравісної температури
Випадковий патент: Спосіб закріплення нежорстких заготовок