Спосіб забезпечення старту ракети на початковій ділянці траєкторії
Номер патенту: 36668
Опубліковано: 10.11.2008
Автори: Бондар Михайло Анатолійович, Романов Юрко Олександрович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Лопота Віталій Олександрович, Азанов Ілля Борисович
Формула / Реферат
Спосіб забезпечення старту ракети на початковій ділянці траєкторії, який базується на тому, що стабілізацію ракети на ділянці виходу за межі габаритних точок стартової споруди здійснюють відносно максимально виступаючої точки її хвостової частини, після чого ракету стабілізують відносно її центра мас, який відрізняється тим, що ракету додатково стабілізують відносно проекції габаритної точки стартової споруди на бічну поверхню ракети, виходячи з обмеження:
Zпгт = |Zц.м. – [(Xт – Lк – Нс + Dh)]×Yпгт| £ Zпгт. доп.,
де: Zпгт. доп. - допустиме бічне відхилення точки ракети (проекція габаритної точки стартової споруди на бічну поверхню ракети), яка знаходиться у кожний поточний момент на рівні верхньої габаритної точки стартової споруди;
Zц.м. - бічне зміщення центра мас ракети;
Хт - відстань від носка до центра мас ракети;
Lк - довжина корпусу ракети;
Нс - висота верхньої габаритної точки стартової споруди;
Dh - зміна підйому ракети за часом руху;
Yпгт - кутове відхилення ракети у площині розташування проекції габаритної точки стартової споруди на бічну поверхню ракети.
Текст
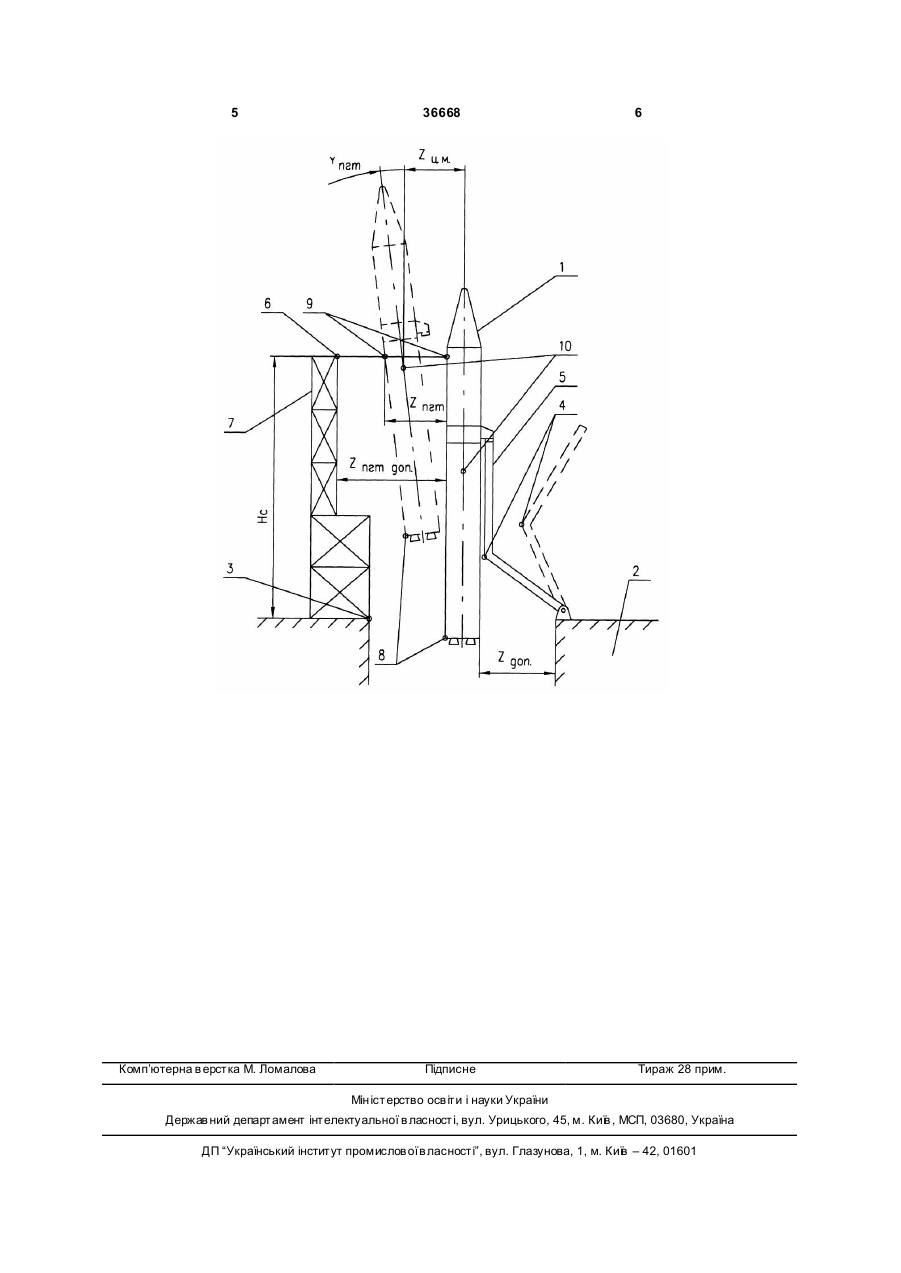
Спосіб забезпечення старту ракети на початковій ділянці траєкторії, який базується на тому, що стабілізацію ракети на ділянці виходу за межі габаритних точок стартової споруди здійснюють відносно максимально виступаючої точки її хвостової частини, після чого ракету стабілізують від U 2 (19) 1 3 36668 де: Z хч - бічне відхилення точки хвостової частини ракети, що максимально стирчить; Z ц.м. - бічне зміщення центра мас ракети; Lт - відстань від центра мас ракети до точки її хвостової частини, що максимально стирчить; Y - кутове відхилення ракети у площині точки її хвостової частини, що максимально стирчить; Z доп. - допустиме відхилення точки хвостової частини, що максимально стирчить, при якому забезпечується безпечний старт. Вказаний спосіб забезпечує ви хід ракети із заглибини стартової споруди без зіткнення тільки до висоти 8м (два калібри ракети). Під час підйому на таку висоту ракета може одержати кутове відхилення до 7° і, якщо продовжувати і далі стабілізувати ракету відносно точки її хвостової частини, що максимально стирчить, то ракета по нахилу може досягти критичного кута (~14°) і може бути навіть відведена у зону падіння за способом, наведеним у [патенті України №24368и, МПК B64G5/00, F02K9/95, 2007р.]. Для забезпечення заправлення верхніх ступенів (розгінних блоків) ракети компонентами палива на стартовій споруді розміщують заправнодренажну башту (ЗДБ) висотою до 50м, при цьому відстань від ЗДБ до твірної ракети складає до 12м. Недоліком відомого способу є його невисокі експлуатаційні якості, тому що висота ГТСС вже становиться розмірною з довжиною ракети і остання при кутови х відхиленнях може вдаритися о ЗДБ (ГТСС) своєю бічною поверхнею. В основу корисної моделі поставлена задача створення удосконаленого способу забезпечення старту ракети на початковій ділянці траєкторії, який би дозволяв забезпечити підвищення його експлуатаційних якостей шляхом уведення в нього нових елементів і технічних рішень, таких як: - ракета додатково стабілізується відносно проекції габаритної точки стартової споруди на бічну поверхню ракети, що дозволяє виключити досягнення ракетою критичного кута нахилу у процесі старту; - стабілізація ракети проводиться за алгоритмом, виходячи з нижченаведеного обмеження по Zпгт (формула 2), що дозволяє зменшити відхилення проекції габаритної точки (або кількох) стартової споруди на бічну поверхню ракети у межах ГТСС, тобто старт без зіткнення. Поставлена задача вирішується таким чином, що у запропонованому способі забезпечення старту ракети на початковій ділянці траєкторії, який базується на тому, що стабілізацію ракети на ділянці виходу за межи габаритних точок стартової споруди здійснюють відносно максимально виступаючої точки її хвостової частини, після чого ракету стабілізують відносно її центру мас, в ньому ракету додатково стабілізують відносно проекції габаритної точки стартової споруди на бічну поверхню ракети виходячи з обмеження: 4 Zпгт = ½Zц.м. – [(Xт – Lк – Нс + (2) + Dh)]×Yпгт½ £ Zпгт. доп., де: Zпгт доп - допустиме бічне відхилення точки ракети (проекція габаритної точки стартової споруди на бічну поверхню ракети), яка знаходиться у кожний поточний момент на рівні верхньої габаритної точки стартової споруди; Zц.м. - бічне зміщення центру мас ракети; Xт - відстань від носка до центру мас ракети; Lк - довжина корпусу ракети; Нс - висота верхньої габаритної точки стартової споруди; Dh - зміна підйому ракети за часом руху; Yпгт - кутове відхилення ракети у площині розташування проекції габаритної точки стартової споруди на бічну поверхню ракети. Для пояснення способу додаються креслення, на яких схематично зображено взаємне розташування ракети і габаритних точок стартової споруди до старту і у процесі старту ракети (пунктирною лінією). У якості приклада розглядається моно блочна ракета за [патентом України №49669А, МПК B64G1/00, F42B15/00, 2002р.]. Ракету 1 транспортують і встановлюють у п ускову систему стартової споруди 2 заглибленого типу, яка має габаритні точки: 3 - на краю стартової споруди; 4 - на коліні кабель-щогли 5; 6 - у вер хній частині ЗДБ 7, яка розмірна з довжиною ракети 1. Після проведення передстартової підготовки ракети 1 запускають її двигун. Зареєстрував факт початку руху, на висоті 100-200мм від опор пускової системи вмикають автомат стабілізації (АС) і визначають параметри лінійного і кутового руху ракети 1 [див. книгу В. И. Феодосьев "Основы техники ракетного полета", М., "Наука", 1979, с.312, 391]. При цьому під час проходження нижніх габаритних точок 3 і 4 стартової споруди 2 і кабельщогли5 (алгоритм стабілізації наведений у формулі 1) ракету 1 стабілізують відносно точки 8 її хвостового відсіку, що максимально стирчить. Одночасно додатково стабілізують ракету 1, обмежуючи переміщення її точок 9, які є проекцією габаритної точки 6 ЗДБ 7 на бічну поверхню ракети 1 (алгоритм стабілізації наведений у формулі 2). Після проходження ракетою 1 (тобто її точки 8) габаритної точки 6 на ЗДБ 7 ракету 1 переводять на стабілізацію відносно центра мас 10. Застосування запропонованого способу дозволяє забезпечити безпечність старту ракети зі стартової споруди з габаритними точками. Це важливо для ракети з киснево-водневим розгінним блоком (КВРБ), тому що для нього ЗДБ бажано розміщувати на мінімальній відстані від ракети, щоб забезпечити гарантоване відведення заправних комунікацій у процесі пуску (без суттєвого обмеження швидкості вітру у момент старту ракети). 5 Комп’ютерна в ерстка М. Ломалова 36668 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for provision of rocket start at initial section of trajectory
Автори англійськоюAzanov Illia Borysovych, Bondar Mykhailo Anatoliiovych, Lopota Vitalii Oleksandrovych, Mokin Andrii Oleksandrovych, Mokin Oleksandr Vasyliovych, Romanov Yurko Oleksandrovych
Назва патенту російськоюСпособ обеспечения старта ракеты на начальном участке траектории
Автори російськоюАзанов Илья Борисович, Бондар Михаил Анатольевич, Лопота Виталий Александрович, Мокин Андрей Александрович, Мокин Александр Васильевич, Романов Юрко Александрович
МПК / Мітки
Мітки: початковій, ракети, забезпечення, спосіб, ділянці, траєкторії, старту
Код посилання
<a href="https://ua.patents.su/3-36668-sposib-zabezpechennya-startu-raketi-na-pochatkovijj-dilyanci-traehktori.html" target="_blank" rel="follow" title="База патентів України">Спосіб забезпечення старту ракети на початковій ділянці траєкторії</a>
Спосіб пуску ракети “пакетної” схеми зі стартової споруди наземного комплексу

Номер патенту: 20363
Опубліковано: 15.01.2007
Автори: Мокін Андрій Олександрович, Коваленко Сергій Григорович, Мокін Олександр Васильович, Орлов Михайло Филипович, Чекалін Володимир Миколайович, Мосур Анатолій Олексійович
МПК: B64G 5/00, F42B 15/00
Мітки: спосіб, ракети, пакетної, пуску, споруди, наземного, схемі, комплексу, стартової
Формула / Реферат:
Спосіб пуску ракети "пакетної" схеми зі стартової споруди наземного комплексу, що включає транспортування ракети до стартової споруди, встановлення ракети на стартову споруду, заправлення компонентами палива, запускання рушійних установок ракетних блоків, вертикальний підйом ракети з послідовним розворотом по крену і тангажу, а в разі виникнення аварійної ситуації під час вертикального підйому - вимикання рушійних установок після...
Спосіб керування ракетою з багатокамерним двигуном на стартовому відрізку траєкторії, стартуючої з рухомої основи
Номер патенту: 51758
Опубліковано: 16.12.2002
Автори: Андронов Артур Семенович, Морозов Валерій Матвійович, Дегтярьова Олена Анатоліївна
МПК: F42B 15/00, F41F 3/00
Мітки: ракетою, відрізку, рухомої, основі, стартуючої, двигуном, багатокамерним, траєкторії, спосіб, стартовому, керування
Формула / Реферат:
Спосіб керування ракетою з багатокамерним двигуном на початковому відрізку траєкторії, що стартує з рухомої основи, який включаює операції визначення висоти підйому ракети, кутового та лінійного пересування ракети і видачі команд на виконавчі органи керування ракетою для відпрацьовування збурень, який відрізняється тим, що здійснюють програмний доворот усіх керуючих камер згоряння двигуна ракети до площини, яка перпендикулярна «небезпечному...
Спосіб пуску ракети “пакетної” схеми зі стартової споруди наземного комплексу
Номер патенту: 24368
Опубліковано: 25.06.2007
Автори: Селезньов Аркадій Олександрович, Шульга Любов Павлівна, Мокін Андрій Олександрович, Мокін Олександр Васильович, Кондратюк Анатолій Миколайович, Потапов Олександр Михайлович
Мітки: наземного, споруди, пакетної, пуску, комплексу, спосіб, ракети, стартової, схемі
Формула / Реферат:
1. Спосіб пуску ракети "пакетної" схеми зі стартової споруди наземного комплексу, що включає транспортування ракети до стартової споруди, встановлення ракети на стартову споруду, заправлення ракети компонентами палива, запускання рушійних установок ракетних блоків, вертикальний підйом ракети з послідовним розворотом по крену і тангажу після проходження максимальної висоти елементів стартової споруди, запускання двигунів відведення...
Спосіб пуску ракети

Номер патенту: 25654
Опубліковано: 10.08.2007
Автори: Мокін Олександр Васильович, Давидов Олександр Антонович, Карастоянов Євген Іванович, Шилов Михайло Романович, Іванов Микола Миколайович, Мокін Андрій Олександрович
МПК: B64G 1/00, F42B 15/00
Формула / Реферат:
1. Спосіб пуску ракети, що включає операції складання ракети, змінювання колориметричної характеристики поверхні ступеня на більш кольороконтрастну, транспортування ракети до стартової споруди, встановлення ракети на стартову споруду, підготовки до пуску, пуску, відділення ступеня, приземлення, пошуку і евакуації ступеня, який відрізняється тим, що в ньому змінювання колориметричної характеристики поверхні ступеня здійснюють після пуску до...
Агрегат для транспортування ракети
Номер патенту: 46654
Опубліковано: 15.05.2002
Автори: Мокін Олександр Васильович, Козак Ігор Львович, Мокін Андрій Олександрович, Мікаєв Володимир Сергійович, Легеза Володимир Семенович, Баранов Євген Юр'євич
МПК: B64G 5/00
Мітки: ракети, агрегат, транспортування
Формула / Реферат:
Агрегат для транспортування ракети, переважно у вертикальному положенні, що містить встановлену на шасі прямокутну основу, на якій змонтовані ферма обслуговування, установні вузли й вузли зв'язку ракети з наземним обладнанням, який відрізняється тим, що у ньому прямокутна основа складається з двох частин, одна з яких виконана з поздовжним вирізом, переважно П-подібної форми, в якому розміщена змінна частина, на якій змонтовані установні вузли...
Попередній патент: Спосіб виготовлення консерванту сперми
Наступний патент: Спосіб прогнозування розвитку сніду у дітей
Випадковий патент: Спосіб обліку чисельності кровосисних двокрилих комах на тварині за допомогою цифрової фотокамери