Мікромеханічний гіроскоп
Номер патенту: 85528
Опубліковано: 25.11.2013
Автори: Бондар Павло Михайлович, Лошкарьова Катерина Валеріївна
Формула / Реферат
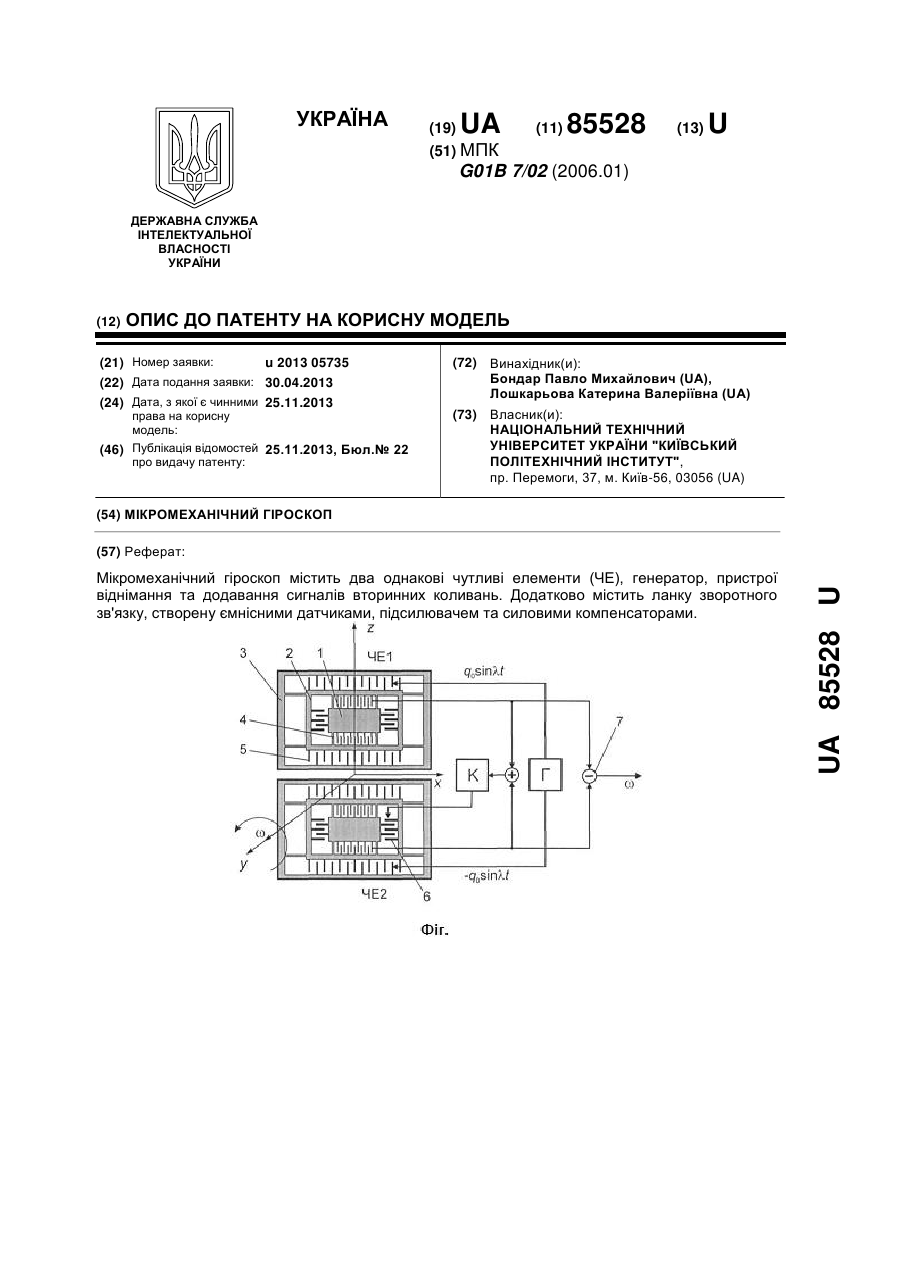
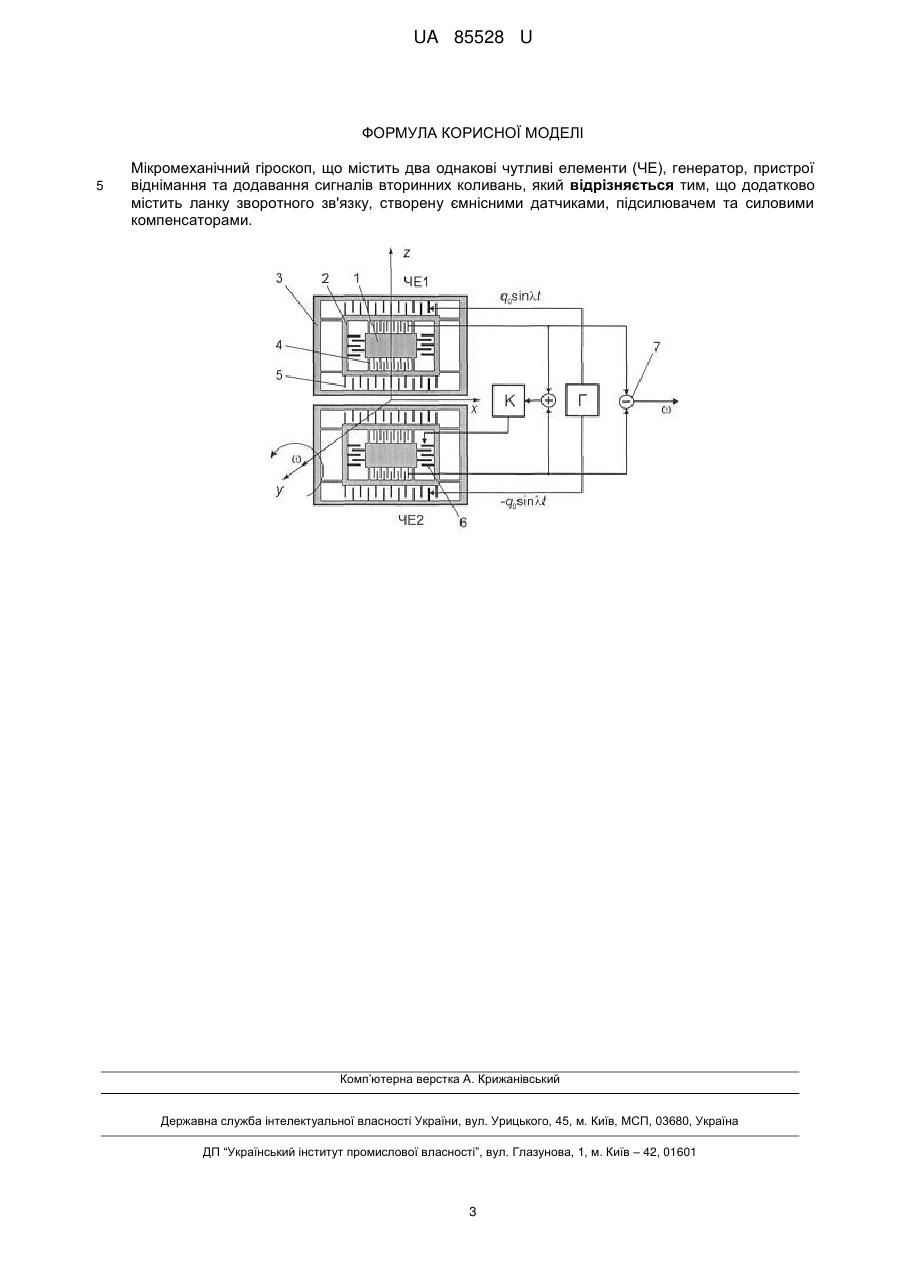
Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрої віднімання та додавання сигналів вторинних коливань, який відрізняється тим, що додатково містить ланку зворотного зв'язку, створену ємнісними датчиками, підсилювачем та силовими компенсаторами.
Текст
Реферат: UA 85528 U UA 85528 U 5 10 15 20 25 30 35 Корисна модель належить до області навігаційної техніки, а саме до вимірювачів кутової швидкості, і може бути використана в системах орієнтації та навігації для рухомих об'єктів, підвищення точності та надійності систем позиціонування та навігації (GPS), для стабілізації рухомих систем автомобілів, літаків, роботів, антен і промислового обладнання, для введення даних у портативні комп'ютери (PDA) та багатьох інших галузях. Найближчим аналогом є мікромеханічний гіроскоп ADXRS 150 фірми Analog Devices [US Patent 6505511. Date of Patent Jan. 14, 2003, Int. Cl. G01P 9/04], який характеризується тим, що в ньому використовуються два механічно незалежних резонатори для того, щоб реалізувати диференційний режим обробки вихідної інформації. Проте ця схема потребує максимальної ідентичності параметрів окремих вимірювачів. Якщо параметри первинних коливань можна вирівняти за допомогою систем фазового автопідстроювання частоти, то такі параметри як неоднаковість власних частот вторинних коливань суттєво впливають на точність вимірювань кутової швидкості рухомого об'єкту. Це є недоліком даної схеми. В основу корисної моделі поставлено задачу зменшення інструментальних складових похибок вимірювань кутової швидкості шляхом введення додаткових елементів. Поставлена задача вирішується тим, що в мікромеханічному гіроскопі, що містить два однакові чутливі елементи, генератор, пристрій віднімання та додавання сигналів вторинних коливань, новим є те, що додатково містить від'ємний зворотній зв'язок по сумі вихідних сигналів двох ЧЕ. Корисна модель пояснюється кресленням. На кресленні зображено мікромеханічний гіроскоп, що містить два однакових чутливих елементи ЧЕ1 та ЧЕ2. Кожен чутливий елемент складається з інерційної маси 1, рамки 2, основи 3, ємнісного датчика 4, системи збудження первинних коливань 5. Також на кресленні позначено: - вектор кутової швидкості, xyz - система координат зв'язана з об'єктом, q сигнал збудження первинних коливань, - вихідний сигнал кутової швидкості, система силової компенсації 6, пристрій віднімання вторинних коливань 7, пристрій додавання вторинних коливань 8. Таким чином основними елементами запропонованої схеми є два механічно незалежних чутливих елементи (ЧЕ1 та ЧЕ2), системи збудження 5 яких живляться від одного генератора (Г) так, що вимушені коливання їх чутливих елементів здійснюються в протифазі з частотою 0 . З метою зменшення інструментальних складових похибок застосований від'ємний зворотній зв'язок по сумі вихідних сигналів двох ЧЕ. Ланка зворотного зв'язку створена ємнісними датчиками 4, підсилювачем (К) та силовими компенсаторами 6 одного з чутливих елементів. Диференціальний вихід дозволяє спростити виділення сигналів про кутову швидкість, яка вимірюється шляхом вирахування вхідних сигналів вимірювачів. Такий вимірювач описується системою рівнянь, яка має вигляд: (p2 2h p k 2 U2 )x (p) (2Up )z (p) 0; 11 11 1 1 2 2 2 (p 2h12p k12 U )z1(p) (2dUp )x1(p) q(p); 2 2 2 2 (p 2h21p k 21 U )x 2 (p) (2Up )z 2 (p) k 33 (x1(p) x 2 (p)); 2 (p 2h22p k 2 U2 )z 2 (p) (2dUp )x 2 (p) q(p), 22 (1.1) де h11 , h12 та h21 і h22 - коефіцієнти демпфування, відповідні руху відповідного чутливого 40 45 2 елемента в напрямку координат x 1 і x 2 , k11 , k 2 - парціальні частоти інерційної маси 21 2 відповідного чутливого елемента, k12 , k 2 - парціальні частоти рамки з інерційною масою 22 відповідного чутливого елемента, U - кутова швидкість, d - безрозмірний коефіцієнт інерційної 2 асиметрії, q(p) - узагальнене прискорення, k 33 - коефіцієнт зворотного зв'язку. Система рівнянь руху чуттєвого елемента розпадається на дві групи рівнянь. З врахуванням того, що параметри елементів можуть відрізнятися, приймемо h21 h22 h2 , h11 h12 h1 , 2 k12 k 22 k 2 , k 21 k11 k k1 U2 , проведемо деякі перетворення: 2 2 (p 2 2h1p k11 k 33 )x1(p) 2U(pz(p)) , 2 2 k 33 x1(p) [p 2 2h1p (k11 k)2 k 33 ]x 2 (p) 2U(pz(p)) ; 1 UA 85528 U q(p) де z(p) z1(p) z 2 (p) - розв'язки другого та четвертого рівнянь системи. p 2h2p k 2 2 Оскільки нас цікавлять тільки вторинні коливання, розглянемо розв'язок першого та третього рівняння. Тоді рух ЧЕ1 по координаті x1(p) : x1(p) 2U(pz(p)) 2 2 (p 2h1p k11) 2 . (1.2) 5 Рух ЧЕ1 по координаті x 2 (p) : x 2 (p) 2 2 2U(pz(p))(p 2 2h1p k11 k 33 ) 2 2 (p 2 2h1p (k11 k)2 k 33 )(p 2 2h1p k11) де x(p) 10 x1(p) x(p) , (1.3) 2k11U(pz(p))k . 2 2 2 (p 2h1p k11 k 33 )(p2 2h1p k11) Різниця двох сигналів (1.2) і (1.3): 2k11U(pz(p))k 4U(pz(p)) . x1(p) x 2 (p) 2 2 2 2 (p2 2h1p k11) (p2 2h1p k11 k 33 )(p2 2h1p k11) 2 2 2 Якщо забезпечити виконання нерівності k 33 p2 2h1p k11 , останній вираз можна спростити: x1(p) x 2 (p) 4U(pz(p)) (p 2 2 2h1p k11) 2U(pz(p))k11k 2 k 33 (p2 2 2h1p k11) . (1.4) 15 Відносна похибка вимірювань, викликана неоднаковістю парціальних частот двох незалежних вимірювачів при застосуванні від'ємного зворотного зв'язку по сумі вихідних сигналів: x(p) 2 x(p) 1 k11 , k 2 2x 1(p) 2 k 33 (1.5) 20 25 де k k . k11 У разі відсутності загального зворотного зв'язку формула (1.4) набуває вигляду: 2U(pz(p))k11k . 4U(pz(p)) x1(p) x 2 (p) 2 2 2 (p 2h1p k11) (p2 2h1p k11)2 Тоді відносна похибка вимірювань, обумовлена неоднаковістю параметрів вимірювачів, в цьому випадку має вигляд: x(p) 2 k11 2 2(p 2 2h2p k11) k . двох (1.6) Якщо порівняти формули (1.5) та (1.6), неважко переконатися, що відносна похибка 30 35 2 2 вимірювань при наявності зворотного зв'язку є значно меншою без нього, оскільки k 33 k11 . Таким чином на точність вимірювань суттєво впливає неоднаковість параметрів ММГ, параметрів систем збудження первинних коливань та лінійної вібрації основи з частотою збудження в напрямку первинних коливань. Введення комбінованого диференційного зворотного зв'язку по сумі вихідних сигналів двох ЧЕ дозволяє зменшити інструментальні складові похибок вимірювань кутової швидкості, викликані неідентичністю параметрів окремих вимірювачів. 2 UA 85528 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрої віднімання та додавання сигналів вторинних коливань, який відрізняється тим, що додатково містить ланку зворотного зв'язку, створену ємнісними датчиками, підсилювачем та силовими компенсаторами. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBondar Pavlo Mykhailovych, Loshkariova Kateryna Valeriivna
Автори російськоюБондарь Павел Михайлович, Лошкарева Екатерина Валериевна
МПК / Мітки
МПК: G01B 7/02
Мітки: мікромеханічний, гіроскоп
Код посилання
<a href="https://ua.patents.su/5-85528-mikromekhanichnijj-giroskop.html" target="_blank" rel="follow" title="База патентів України">Мікромеханічний гіроскоп</a>
Мікромеханічний гіроскоп
Номер патенту: 61843
Опубліковано: 25.07.2011
Автори: Житнік Тетяна Сергіївна, Бондар Павло Михайлович, Лошкарьова Катерина Валеріївна
МПК: G01C 23/00
Мітки: гіроскоп, мікромеханічний
Формула / Реферат:
Мікромеханічний гіроскоп, що містить два однакові чутливі елементи (ЧЕ), генератор, пристрій віднімання сигналів вторинних коливань, який відрізняється тим, що додатково містить пристрій додавання вторинних коливань.
Балочний вібраційний гіроскоп для систем стабілізації
Номер патенту: 85316
Опубліковано: 11.11.2013
Автори: Чіковані Валерій Валеріанович, Сущенко Ольга Андріївна
МПК: G01C 19/00
Мітки: гіроскоп, вібраційний, стабілізації, балочний, систем
Формула / Реферат:
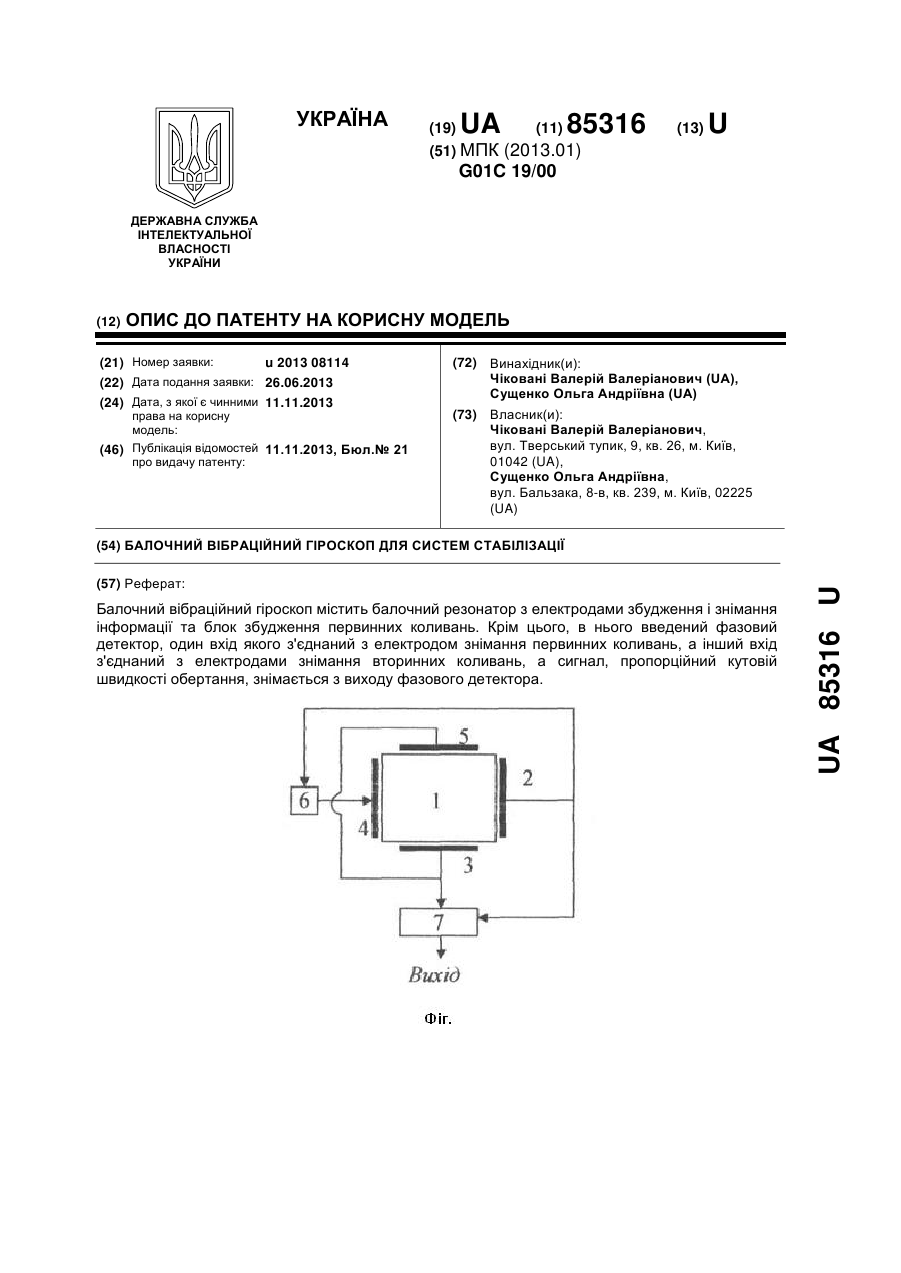
Балочний вібраційний гіроскоп, що містить балочний резонатор з електродами збудження і знімання інформації та блок збудження первинних коливань, який відрізняється тим, що в нього введений фазовий детектор, один вхід якого з'єднаний з електродом знімання первинних коливань, а інший вхід з'єднаний з електродами знімання вторинних коливань, а сигнал, пропорційний кутовій швидкості обертання, знімається з виходу фазового детектора.
Цифровий коріолісівський вібраційний гіроскоп
Номер патенту: 101747
Опубліковано: 25.04.2013
Автори: Цирук Віктор Григорович, Маляров Сергій Прокопович, Ніколаєнко Алла Вікторівна
МПК: G01C 19/56
Мітки: цифровий, коріолісівський, вібраційний, гіроскоп
Формула / Реферат:
Цифровий коріолісівський вібраційний гіроскоп, що містить резонатор з електродами знімання та збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості, який відрізняється тим, що в нього додатково вводяться смугові фільтри, електрично зв'язані з частотоміром, автогенератором та...
Поплавковий гіроскоп

Номер патенту: 61841
Опубліковано: 25.07.2011
Автори: Тривайло Михайло Семенович, Мельник Вікторія Миколаївна, Карачун Володимир Володимирович
МПК: G01C 19/20
Мітки: гіроскоп, поплавковий
Формула / Реферат:
Поплавковий гіроскоп, що містить корпус з циліндричною частково заповненою робочою рідиною порожниною і розташований в порожнині корпусу гіровузол з опорами і датчиками вимірювань відхилень від заданого курсу, який відрізняється тим, що зовнішня поверхня корпусу в поздовжньому напрямку має бочкоподібну форму.
Півсферичний резонаторний гіроскоп з складовим резонатором

Номер патенту: 24460
Опубліковано: 25.06.2007
Автори: Щербань Володимир Іванович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович, Чіковані Валерій Валеріанович
МПК: G01C 19/00
Мітки: гіроскоп, резонаторний, складовим, півсферичний, резонатором
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і оснащений отвором в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором...
Попередній патент: Спосіб оперативного визначення октанового числа бензинів
Наступний патент: Спосіб поліпшення агрофізичних властивостей темно-сірого опідзоленого ґрунту в зерно-просапній короткоротаційній сівозміні
Випадковий патент: Спосіб гранулювання доменного шлаку