Пристрій для телекерування об’єктами з дисперсійно-частотним компандуванням фінітних сигналів

Формула / Реферат
Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів, який на передавальній стороні містить послідовно з'єднані односмуговий модулятор (ОМ), лінійно-частотний модулятор (ЛЧМ) і дисперсійну лінію затримки (ДЛЗ) певного порядку, який відрізняється тим, що функція групового часу затримки(ГЧЗ) цієї ДЛЗ має певне велике значення крутості і на її виході уведено канальний фільтр нижніх частот, а на приймальній стороні уведено послідовно з'єднані другі ОМ, ЛЧМ з тим же призначенням, та ДЛЗ, яка має однаковий порядок з першою ДЛЗ і відповідно зі зменшеним значенням крутості функції ГЧЗ.
Текст
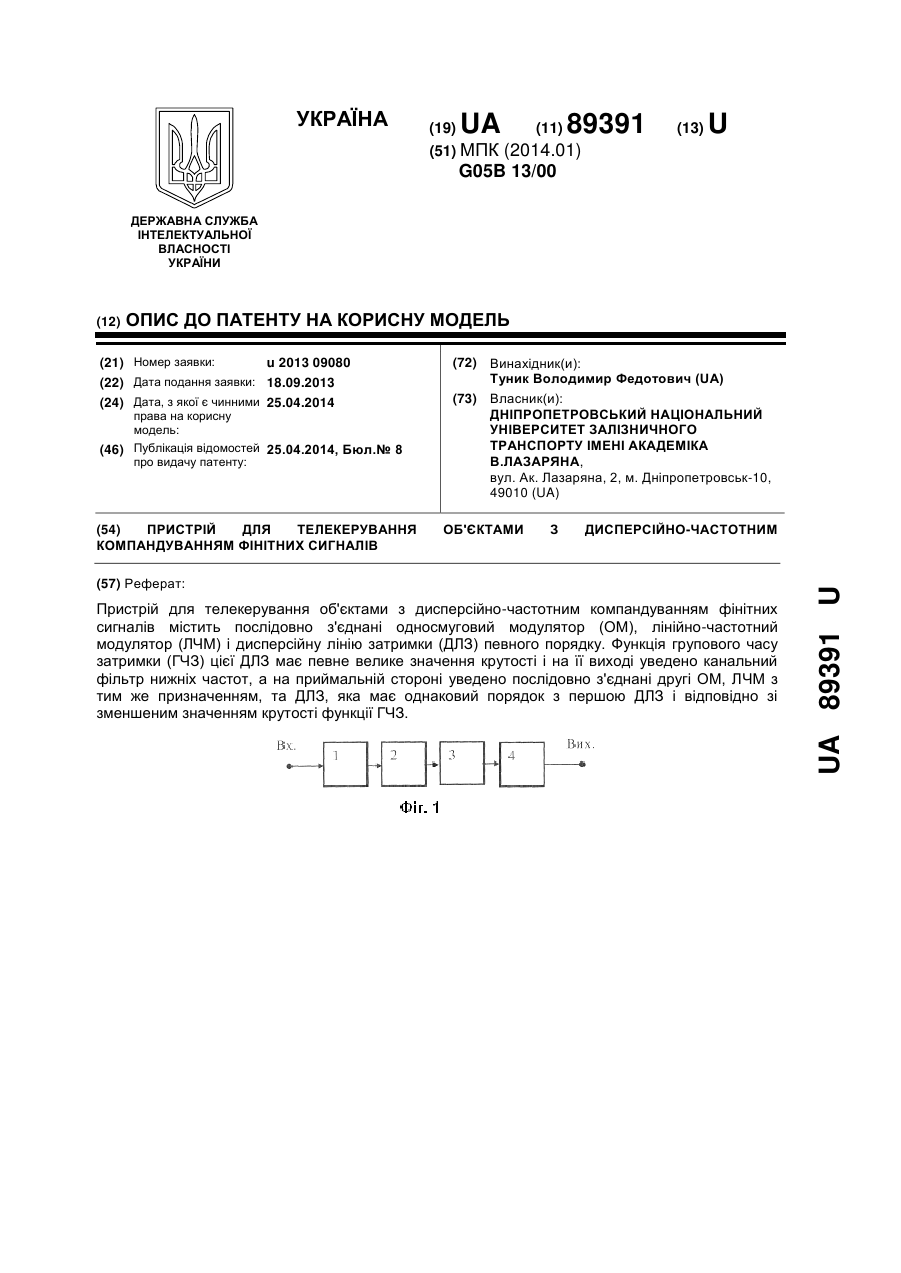
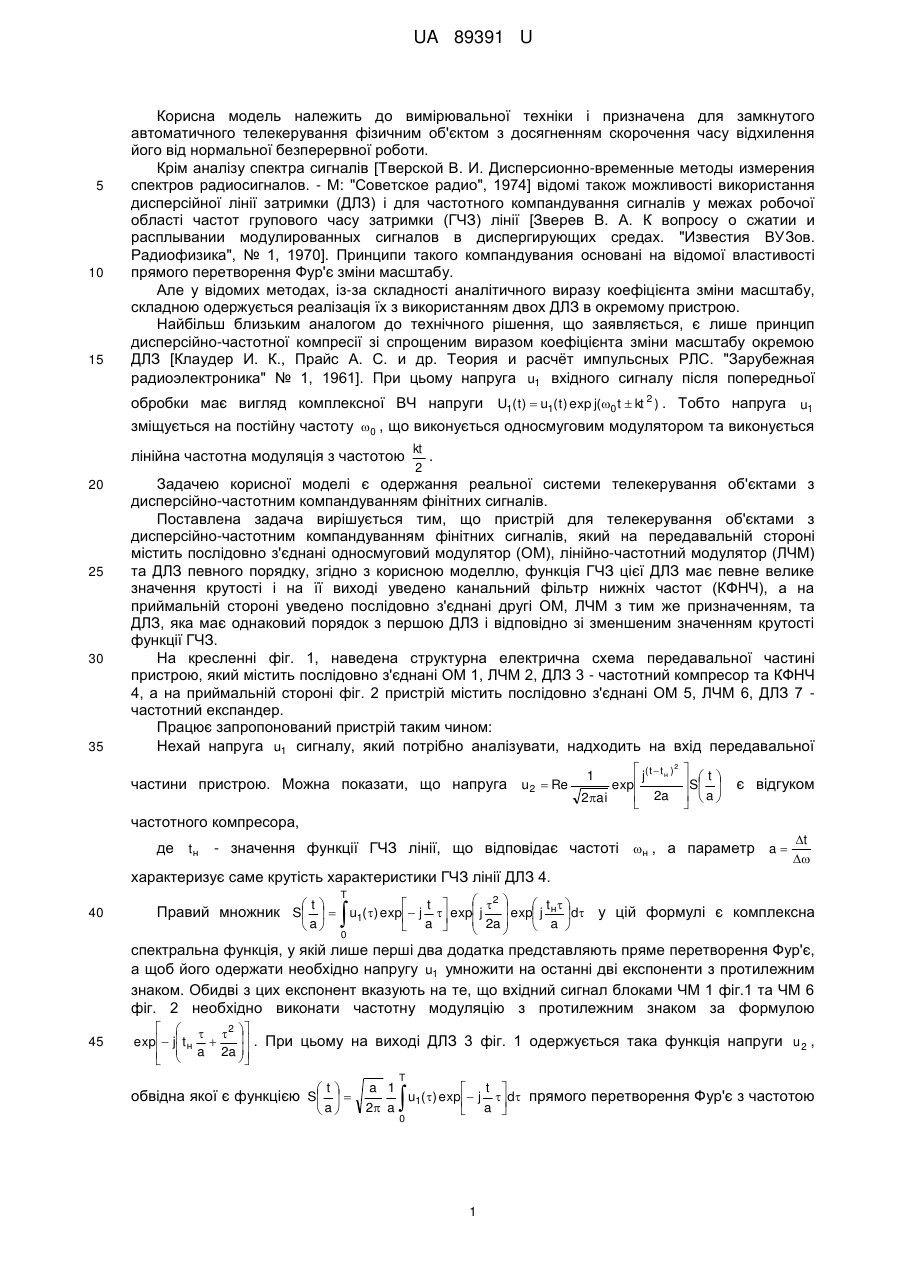
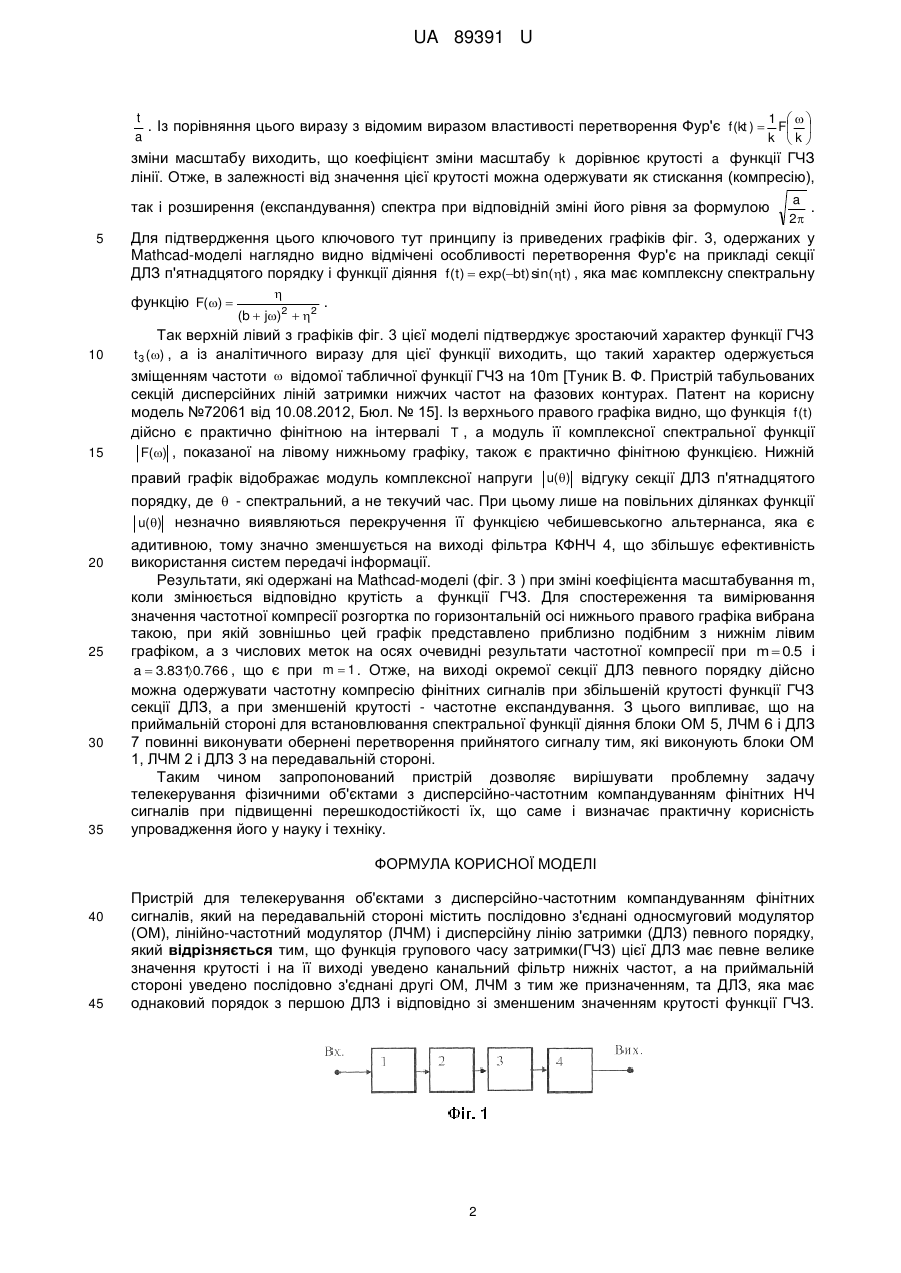
Реферат: Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів містить послідовно з'єднані односмуговий модулятор (ОМ), лінійно-частотний модулятор (ЛЧМ) і дисперсійну лінію затримки (ДЛЗ) певного порядку. Функція групового часу затримки (ГЧЗ) цієї ДЛЗ має певне велике значення крутості і на її виході уведено канальний фільтр нижніх частот, а на приймальній стороні уведено послідовно з'єднані другі ОМ, ЛЧМ з тим же призначенням, та ДЛЗ, яка має однаковий порядок з першою ДЛЗ і відповідно зі зменшеним значенням крутості функції ГЧЗ. UA 89391 U (12) UA 89391 U UA 89391 U 5 10 15 Корисна модель належить до вимірювальної техніки і призначена для замкнутого автоматичного телекерування фізичним об'єктом з досягненням скорочення часу відхилення його від нормальної безперервної роботи. Крім аналізу спектра сигналів [Тверской В. И. Дисперсионно-временные методы измерения спектров радиосигналов. - М: "Советское радио", 1974] відомі також можливості використання дисперсійної лінії затримки (ДЛЗ) і для частотного компандування сигналів у межах робочої області частот групового часу затримки (ГЧЗ) лінії [Зверев В. А. К вопросу о сжатии и расплывании модулированных сигналов в диспергирующих средах. "Известия ВУЗов. Радиофизика", № 1, 1970]. Принципи такого компандувания основані на відомої властивості прямого перетворення Фур'є зміни масштабу. Але у відомих методах, із-за складності аналітичного виразу коефіцієнта зміни масштабу, складною одержується реалізація їх з використанням двох ДЛЗ в окремому пристрою. Найбільш близьким аналогом до технічного рішення, що заявляється, є лише принцип дисперсійно-частотної компресії зі спрощеним виразом коефіцієнта зміни масштабу окремою ДЛЗ [Клаудер И. К., Прайс А. С. и др. Теория и расчёт импульсных РЛС. "Зарубежная радиоэлектроника" № 1, 1961]. При цьому напруга u1 вхідного сигналу після попередньої обробки має вигляд комплексної ВЧ напруги U1( t ) u1( t ) exp j(0 t kt 2 ) . Тобто напруга u1 зміщується на постійну частоту 0 , що виконується односмуговим модулятором та виконується лінійна частотна модуляція з частотою 20 25 30 35 kt . 2 Задачею корисної моделі є одержання реальної системи телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів. Поставлена задача вирішується тим, що пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів, який на передавальній стороні містить послідовно з'єднані односмуговий модулятор (ОМ), лінійно-частотний модулятор (ЛЧМ) та ДЛЗ певного порядку, згідно з корисною моделлю, функція ГЧЗ цієї ДЛЗ має певне велике значення крутості і на її виході уведено канальний фільтр нижніх частот (КФНЧ), а на приймальній стороні уведено послідовно з'єднані другі ОМ, ЛЧМ з тим же призначенням, та ДЛЗ, яка має однаковий порядок з першою ДЛЗ і відповідно зі зменшеним значенням крутості функції ГЧЗ. На кресленні фіг. 1, наведена структурна електрична схема передавальної частині пристрою, який містить послідовно з'єднані ОМ 1, ЛЧМ 2, ДЛЗ 3 - частотний компресор та КФНЧ 4, а на приймальній стороні фіг. 2 пристрій містить послідовно з'єднані ОМ 5, ЛЧМ 6, ДЛЗ 7 частотний експандер. Працює запропонований пристрій таким чином: Нехай напруга u1 сигналу, який потрібно аналізувати, надходить на вхід передавальної частини пристрою. Можна показати, що напруга u2 Re j( t t н ) 2 exp 2a 2ai 1 t S a є відгуком частотного компресора, де tн - значення функції ГЧЗ лінії, що відповідає частоті н , а параметр a t характеризує саме крутість характеристики ГЧЗ лінії ДЛЗ 4. 40 t a T t a 2 exp j t н d у цій формулі є комплексна 2a a Правий множник S u1( ) exp j exp j 0 спектральна функція, у якій лише перші два додатка представляють пряме перетворення Фур'є, а щоб його одержати необхідно напругу u1 умножити на останні дві експоненти з протилежним знаком. Обидві з цих експонент вказують на те, що вхідний сигнал блоками ЧМ 1 фіг.1 та ЧМ 6 фіг. 2 необхідно виконати частотну модуляцію з протилежним знаком за формулою 45 2 . При цьому на виході ДЛЗ 3 фіг. 1 одержується така функція напруги u , exp j t н 2 a 2a t обвідна якої є функцією S a T a 1 t u1( ) exp j d прямого перетворення Фур'є з частотою 2 a a 0 1 UA 89391 U t 1 . Із порівняння цього виразу з відомим виразом властивості перетворення Фур'є f (kt ) F a k k зміни масштабу виходить, що коефіцієнт зміни масштабу k дорівнює крутості a функції ГЧЗ лінії. Отже, в залежності від значення цієї крутості можна одержувати як стискання (компресію), так і розширення (експандування) спектра при відповідній зміні його рівня за формулою 5 a . 2 Для підтвердження цього ключового тут принципу із приведених графіків фіг. 3, одержаних у Mathcad-моделі наглядно видно відмічені особливості перетворення Фур'є на прикладі секції ДЛЗ п'ятнадцятого порядку і функції діяння f (t) exp(bt) sin(t) , яка має комплексну спектральну функцію F() (b j)2 2 . Так верхній лівий з графіків фіг. 3 цієї моделі підтверджує зростаючий характер функції ГЧЗ 10 t 3 () , а із аналітичного виразу для цієї функції виходить, що такий характер одержується 15 зміщенням частоти відомої табличної функції ГЧЗ на 10m [Туник В. Ф. Пристрій табульованих секцій дисперсійних ліній затримки нижчих частот на фазових контурах. Патент на корисну модель №72061 від 10.08.2012, Бюл. № 15]. Із верхнього правого графіка видно, що функція f (t ) дійсно є практично фінітною на інтервалі T , а модуль її комплексної спектральної функції F() , показаної на лівому нижньому графіку, також є практично фінітною функцією. Нижній правий графік відображає модуль комплексної напруги u() відгуку секції ДЛЗ п'ятнадцятого порядку, де - спектральний, а не текучий час. При цьому лише на повільних ділянках функції u( ) незначно виявляються перекручення її функцією чебишевськогно альтернанса, яка є 20 25 30 35 адитивною, тому значно зменшується на виході фільтра КФНЧ 4, що збільшує ефективність використання систем передачі інформації. Результати, які одержані на Mathcad-моделі (фіг. 3 ) при зміні коефіцієнта масштабування m, коли змінюється відповідно крутість a функції ГЧЗ. Для спостереження та вимірювання значення частотної компресії розгортка по горизонтальній осі нижнього правого графіка вибрана такою, при якій зовнішньо цей графік представлено приблизно подібним з нижнім лівим графіком, а з числових меток на осях очевидні результати частотної компресії при m 0.5 і a 3.831 0.766 , що є при m 1 . Отже, на виході окремої секції ДЛЗ певного порядку дійсно можна одержувати частотну компресію фінітних сигналів при збільшеній крутості функції ГЧЗ секції ДЛЗ, а при зменшеній крутості - частотне експандування. З цього випливає, що на приймальній стороні для встановлювання спектральної функції діяння блоки ОМ 5, ЛЧМ 6 і ДЛЗ 7 повинні виконувати обернені перетворення прийнятого сигналу тим, які виконують блоки ОМ 1, ЛЧМ 2 і ДЛЗ 3 на передавальній стороні. Таким чином запропонований пристрій дозволяє вирішувати проблемну задачу телекерування фізичними об'єктами з дисперсійно-частотним компандуванням фінітних НЧ сигналів при підвищенні перешкодостійкості їх, що саме і визначає практичну корисність упровадження його у науку і техніку. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Пристрій для телекерування об'єктами з дисперсійно-частотним компандуванням фінітних сигналів, який на передавальній стороні містить послідовно з'єднані односмуговий модулятор (ОМ), лінійно-частотний модулятор (ЛЧМ) і дисперсійну лінію затримки (ДЛЗ) певного порядку, який відрізняється тим, що функція групового часу затримки(ГЧЗ) цієї ДЛЗ має певне велике значення крутості і на її виході уведено канальний фільтр нижніх частот, а на приймальній стороні уведено послідовно з'єднані другі ОМ, ЛЧМ з тим же призначенням, та ДЛЗ, яка має однаковий порядок з першою ДЛЗ і відповідно зі зменшеним значенням крутості функції ГЧЗ. 2 UA 89391 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюTunyk Volodymyr Fedotovych
Автори російськоюТуник Владимир Федотович
МПК / Мітки
МПК: G05B 13/00
Мітки: компандуванням, об'єктами, пристрій, телекерування, сигналів, фінітних, дисперсійно-частотним
Код посилання
<a href="https://ua.patents.su/5-89391-pristrijj-dlya-telekeruvannya-obehktami-z-dispersijjno-chastotnim-kompanduvannyam-finitnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для телекерування об’єктами з дисперсійно-частотним компандуванням фінітних сигналів</a>
Спосіб пеленгації джерел радіовипромінювання з частотним поділом сигналів
Номер патенту: 4882
Опубліковано: 15.02.2005
Автори: БОЛОБАН СЕРГІЙ ІВАНОВИЧ, КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ
МПК: G01S 3/02
Мітки: джерел, пеленгації, частотним, сигналів, поділом, радіовипромінювання, спосіб
Формула / Реферат:
Спосіб пеленгації джерел радіовипромінювання з частотним поділом сигналів, що включає когерентний прийом сигналів N-елементною антенною решіткою (АР) з багатоканальним приймачем, один з каналів якої є опорним, синхронне перетворення прийнятих елементами АР сигналів у цифрові сигнали аналого-цифровими перетворювачами в кожному каналі, здійснення спектрального аналізу у всіх каналах АР, проведення в спецпроцесорі для кожного частотного...
Пристрій для аналізу спектра низькочастотних сигналів реально оптимальною дисперсійною лінією затримки
Номер патенту: 88514
Опубліковано: 25.03.2014
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: сигналів, лінією, дисперсійною, оптимальною, аналізу, затримки, низькочастотних, пристрій, реальної, спектра
Формула / Реферат:
Пристрій для аналізу спектра низькочастотних сигналів реально оптимальною дисперсійною лінією затримки (ДЛЗ), який містить необхідну кількість каскадно з'єднаних базових секцій ДЛЗ від 5-го до 15-го порядку, кожна з яких містить послідовно з'єднані один фазовий контур першого порядку та відповідно від двох до семи фазових контурів другого порядку, який відрізняється тим, що на виході базової ДЛЗ уведено каскадно з'єднану другу реальну ДЛЗ з...
Пристрій для дисперсійно-слідкувального аналізу у реальному часі активного спектра короткочасних нестаціонарних процесів
Номер патенту: 48472
Опубліковано: 25.03.2010
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: спектра, реальному, активного, пристрій, короткочасних, дисперсійно-слідкувального, аналізу, нестаціонарних, процесів, часі
Формула / Реферат:
1. Пристрій для дисперсійно-слідкувального аналізу у реальному часі активного спектра короткочасних нестаціонарних процесів, який містить дисперсійну лінію затримки (ДЛЗ), вихід якої є виходом пристрою, та синхронізатор, вхід якого з'єднано зі входом пристрою, який відрізняється тим, що ДЛЗ є автоматично керованою (слідкувальною) лінією, на вході якої уведено автоматично керований електричний частотний фільтр (АКФ), який містить керований...
Пристрій для точного аналізу спектра низькочастотних сигналів реальними дисперсійними лініями затримки
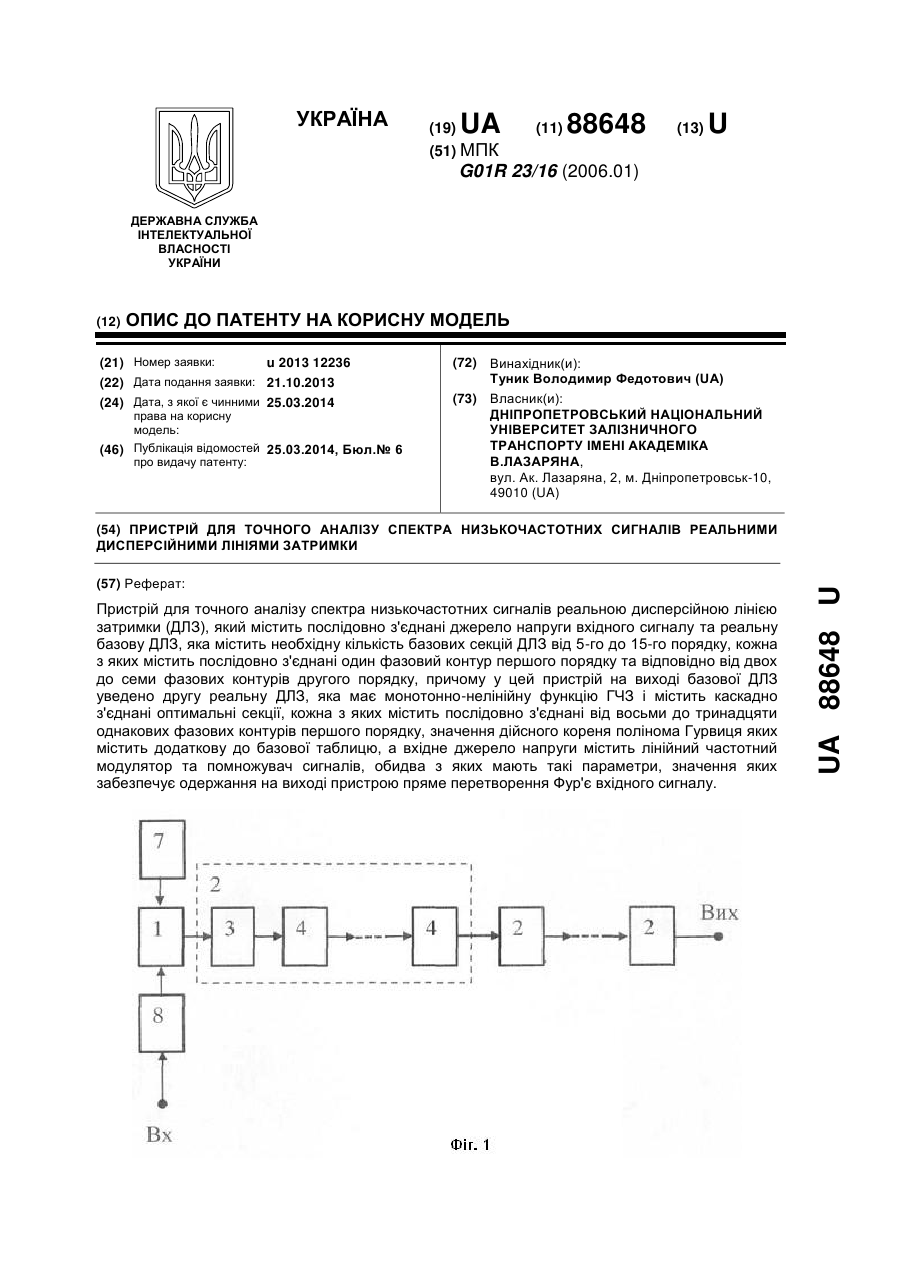
Номер патенту: 88648
Опубліковано: 25.03.2014
Автор: Туник Володимир Федотович
МПК: G01R 23/16
Мітки: пристрій, низькочастотних, аналізу, лініями, реальними, спектра, затримки, точного, дисперсійними, сигналів
Формула / Реферат:
Пристрій для точного аналізу спектра низькочастотних сигналів реальною дисперсійною лінією затримки (ДЛЗ), який містить послідовно з'єднані джерело напруги вхідного сигналу та реальну базову ДЛЗ, яка містить необхідну кількість базових секцій ДЛЗ від 5-го до 15-го порядку, кожна з яких містить послідовно з'єднані один фазовий контур першого порядку та відповідно від двох до семи фазових контурів другого порядку, який відрізняється тим, що у...
Пристрій для приймання команд телекерування
Номер патенту: 40642
Опубліковано: 15.08.2001
Автори: Портнов Михайло Львович, ПОРТНОВ ЄВГЕН МИХАЙЛОВИЧ
МПК: G08C 19/28
Мітки: команд, телекерування, приймання, пристрій
Формула / Реферат:
1. Устройство для приема команд телеуправления блоком моторных приводов масляных выключателей, выполненным в виде индивидуальных ячеек по числу n объектов управления, причем каждая ячейка содержит двигатель переменного тока и двухпозиционный переключатель, рабочий орган которого соединен через передаточный механизм с осью двигателя, подвижный контакт соединен с обмотками двигателя,одноименные крайние выводы переключателей всех ячеек...
Попередній патент: Мукозально-адгезивний фітогель з пробіотиками
Наступний патент: Силовимірювальна електротензометрична касета системи дистанційного контролю зусиль
Випадковий патент: Спосіб визначення кавітаційної стійкості матеріалів та пристрій для його здійснення