Пристрій запізнювання пневмосигналів
Номер патенту: 95534
Опубліковано: 25.12.2014
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович

Формула / Реферат
Пристрій запізнювання пневмосигналів, що містить корпус, установлені на корпусі електродвигун, колесо пам'яті з пальцями, що приводиться від електродвигуна, пневмомеханічний перетворювач вхідних сигналів у вигляді мембранного виконавчого механізму з позиціонером і штоком, взаємодіючим з пальцями, пневмомеханічний перетворювач з головкою зчитування вихідних сигналів зі штоком, взаємодіючим з пальцями і зв'язаний з черв'ячним колесом з приводною ручкою настроювання часу запізнювання, який відрізняється тим, що в ньому додатково до торців пальців гвинтами закріплені перша і друга пружні еластичні стрічки з можливістю, при переміщенні пальців, деформуватися, а пальці фіксуються, розміщеними в отворах по радіусу колеса пам'яті, фіксаторами, виконаними у вигляді регулювальних гвинтів, взаємодіючих через сідло з одним торцем, установлених в отворах, пружин, протилежні торці яких через друге сідло взаємодіють з пальцями, причому штоки перетворювачів мають ролики з кільцевими канавками на торцях, з можливістю обертатися при взаємодії канавками з пружинами еластичними стрічками і повертати пальці у вихідне положення.
Текст
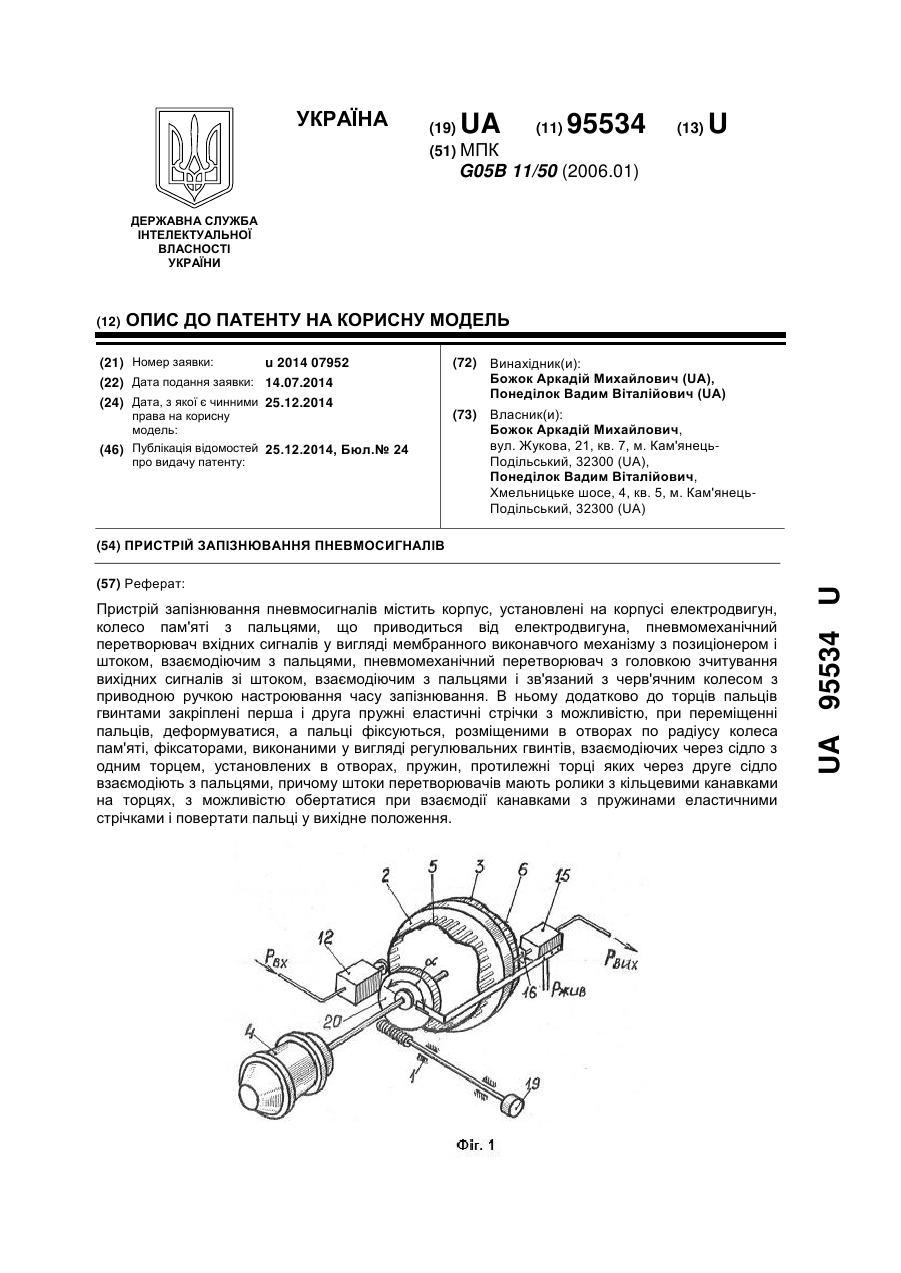
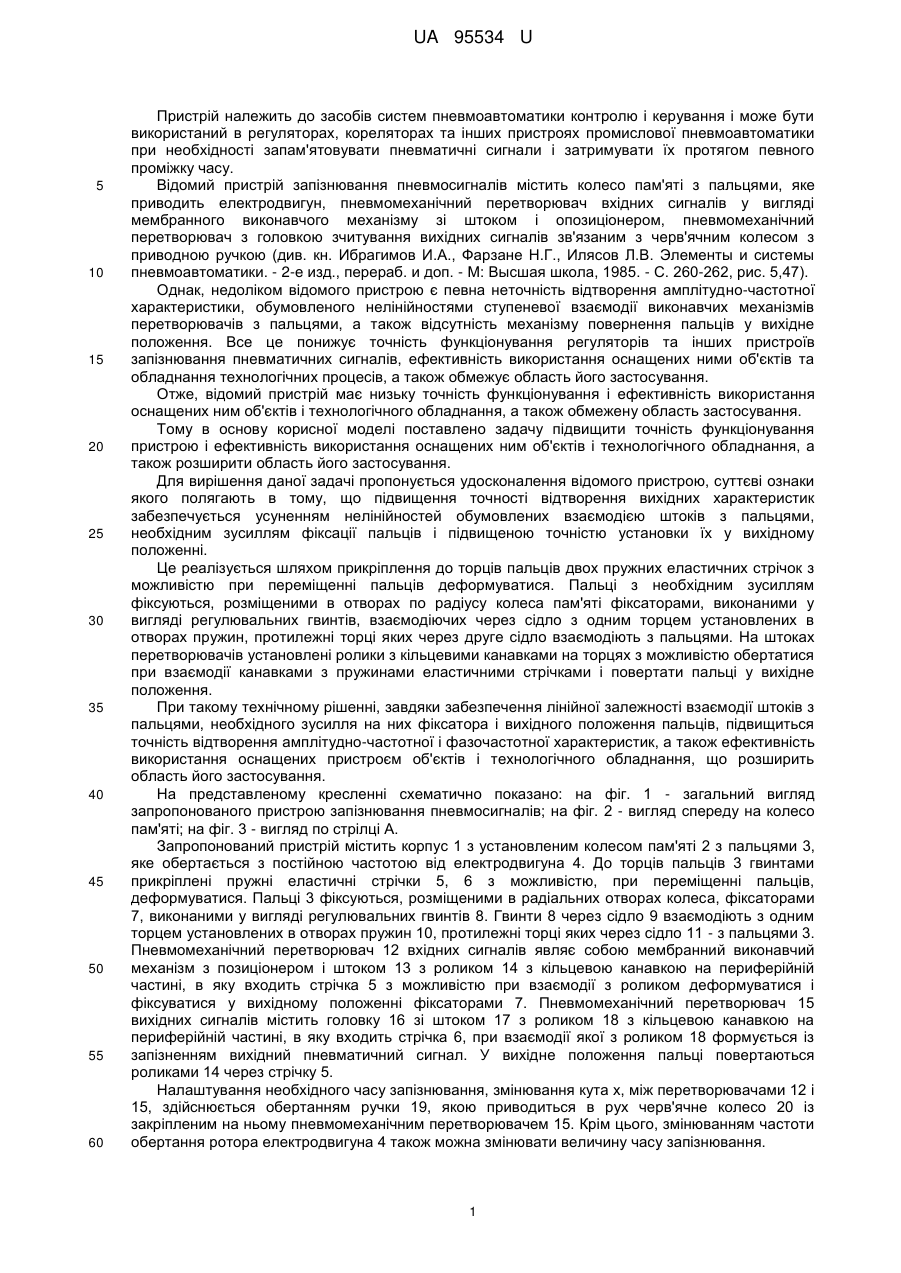
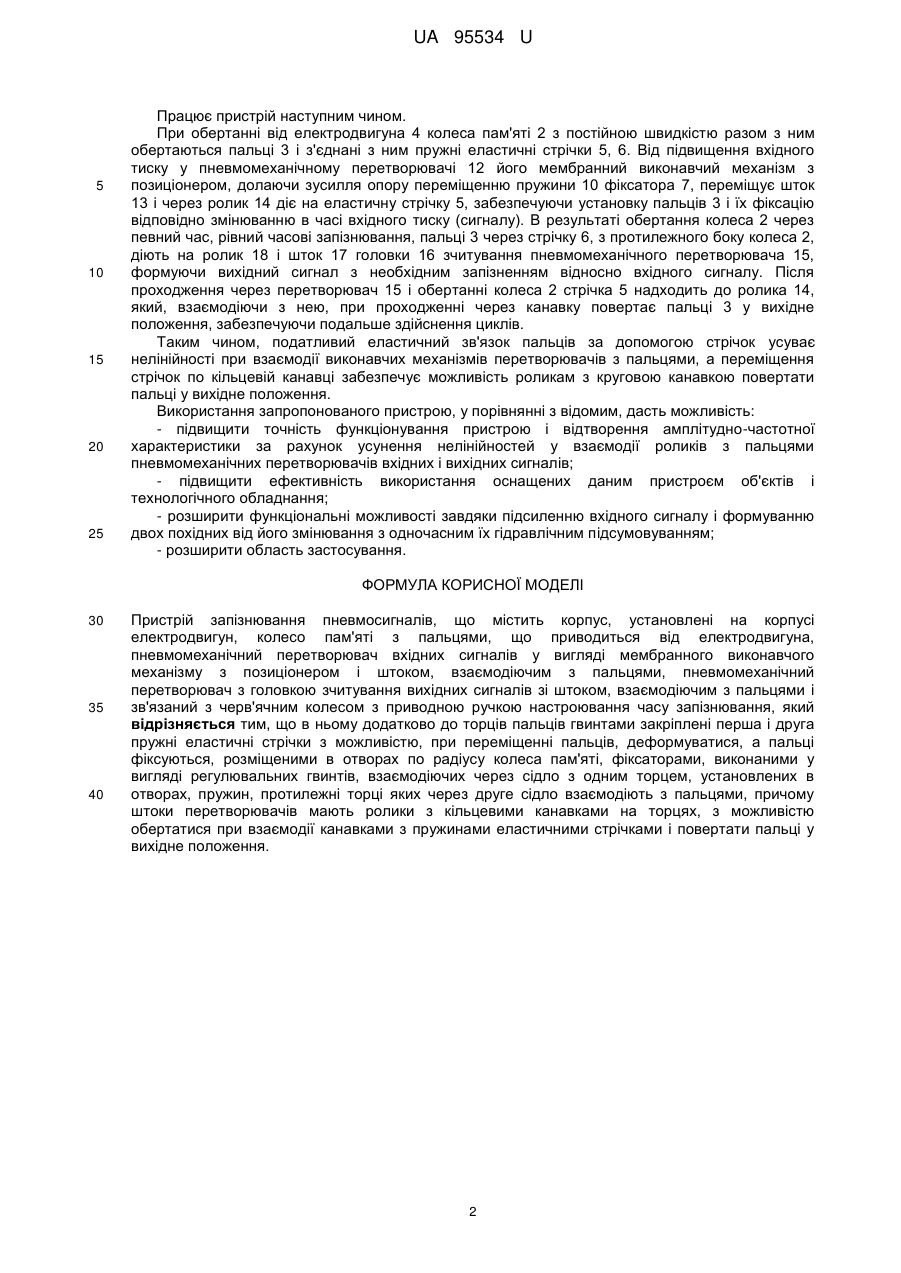
Реферат: Пристрій запізнювання пневмосигналів містить корпус, установлені на корпусі електродвигун, колесо пам'яті з пальцями, що приводиться від електродвигуна, пневмомеханічний перетворювач вхідних сигналів у вигляді мембранного виконавчого механізму з позиціонером і штоком, взаємодіючим з пальцями, пневмомеханічний перетворювач з головкою зчитування вихідних сигналів зі штоком, взаємодіючим з пальцями і зв'язаний з черв'ячним колесом з приводною ручкою настроювання часу запізнювання. В ньому додатково до торців пальців гвинтами закріплені перша і друга пружні еластичні стрічки з можливістю, при переміщенні пальців, деформуватися, а пальці фіксуються, розміщеними в отворах по радіусу колеса пам'яті, фіксаторами, виконаними у вигляді регулювальних гвинтів, взаємодіючих через сідло з одним торцем, установлених в отворах, пружин, протилежні торці яких через друге сідло взаємодіють з пальцями, причому штоки перетворювачів мають ролики з кільцевими канавками на торцях, з можливістю обертатися при взаємодії канавками з пружинами еластичними стрічками і повертати пальці у вихідне положення. UA 95534 U (54) ПРИСТРІЙ ЗАПІЗНЮВАННЯ ПНЕВМОСИГНАЛІВ UA 95534 U UA 95534 U 5 10 15 20 25 30 35 40 45 50 55 60 Пристрій належить до засобів систем пневмоавтоматики контролю і керування і може бути використаний в регуляторах, кореляторах та інших пристроях промислової пневмоавтоматики при необхідності запам'ятовувати пневматичні сигнали і затримувати їх протягом певного проміжку часу. Відомий пристрій запізнювання пневмосигналів містить колесо пам'яті з пальцями, яке приводить електродвигун, пневмомеханічний перетворювач вхідних сигналів у вигляді мембранного виконавчого механізму зі штоком і опозиціонером, пневмомеханічний перетворювач з головкою зчитування вихідних сигналів зв'язаним з черв'ячним колесом з приводною ручкою (див. кн. Ибрагимов И.А., Фарзане Н.Г., Илясов Л.В. Элементы и системы пневмоавтоматики. - 2-е изд., перераб. и доп. - М: Высшая школа, 1985. - С. 260-262, рис. 5,47). Однак, недоліком відомого пристрою є певна неточність відтворення амплітудно-частотної характеристики, обумовленого нелінійностями ступеневої взаємодії виконавчих механізмів перетворювачів з пальцями, а також відсутність механізму повернення пальців у вихідне положення. Все це понижує точність функціонування регуляторів та інших пристроїв запізнювання пневматичних сигналів, ефективність використання оснащених ними об'єктів та обладнання технологічних процесів, а також обмежує область його застосування. Отже, відомий пристрій має низьку точність функціонування і ефективність використання оснащених ним об'єктів і технологічного обладнання, а також обмежену область застосування. Тому в основу корисної моделі поставлено задачу підвищити точність функціонування пристрою і ефективність використання оснащених ним об'єктів і технологічного обладнання, а також розширити область його застосування. Для вирішення даної задачі пропонується удосконалення відомого пристрою, суттєві ознаки якого полягають в тому, що підвищення точності відтворення вихідних характеристик забезпечується усуненням нелінійностей обумовлених взаємодією штоків з пальцями, необхідним зусиллям фіксації пальців і підвищеною точністю установки їх у вихідному положенні. Це реалізується шляхом прикріплення до торців пальців двох пружних еластичних стрічок з можливістю при переміщенні пальців деформуватися. Пальці з необхідним зусиллям фіксуються, розміщеними в отворах по радіусу колеса пам'яті фіксаторами, виконаними у вигляді регулювальних гвинтів, взаємодіючих через сідло з одним торцем установлених в отворах пружин, протилежні торці яких через друге сідло взаємодіють з пальцями. На штоках перетворювачів установлені ролики з кільцевими канавками на торцях з можливістю обертатися при взаємодії канавками з пружинами еластичними стрічками і повертати пальці у вихідне положення. При такому технічному рішенні, завдяки забезпечення лінійної залежності взаємодії штоків з пальцями, необхідного зусилля на них фіксатора і вихідного положення пальців, підвищиться точність відтворення амплітудно-частотної і фазочастотної характеристик, а також ефективність використання оснащених пристроєм об'єктів і технологічного обладнання, що розширить область його застосування. На представленому кресленні схематично показано: на фіг. 1 - загальний вигляд запропонованого пристрою запізнювання пневмосигналів; на фіг. 2 - вигляд спереду на колесо пам'яті; на фіг. 3 - вигляд по стрілці А. Запропонований пристрій містить корпус 1 з установленим колесом пам'яті 2 з пальцями 3, яке обертається з постійною частотою від електродвигуна 4. До торців пальців 3 гвинтами прикріплені пружні еластичні стрічки 5, 6 з можливістю, при переміщенні пальців, деформуватися. Пальці 3 фіксуються, розміщеними в радіальних отворах колеса, фіксаторами 7, виконаними у вигляді регулювальних гвинтів 8. Гвинти 8 через сідло 9 взаємодіють з одним торцем установлених в отворах пружин 10, протилежні торці яких через сідло 11 - з пальцями 3. Пневмомеханічний перетворювач 12 вхідних сигналів являє собою мембранний виконавчий механізм з позиціонером і штоком 13 з роликом 14 з кільцевою канавкою на периферійній частині, в яку входить стрічка 5 з можливістю при взаємодії з роликом деформуватися і фіксуватися у вихідному положенні фіксаторами 7. Пневмомеханічний перетворювач 15 вихідних сигналів містить головку 16 зі штоком 17 з роликом 18 з кільцевою канавкою на периферійній частині, в яку входить стрічка 6, при взаємодії якої з роликом 18 формується із запізненням вихідний пневматичний сигнал. У вихідне положення пальці повертаються роликами 14 через стрічку 5. Налаштування необхідного часу запізнювання, змінювання кута х, між перетворювачами 12 і 15, здійснюється обертанням ручки 19, якою приводиться в рух черв'ячне колесо 20 із закріпленим на ньому пневмомеханічним перетворювачем 15. Крім цього, змінюванням частоти обертання ротора електродвигуна 4 також можна змінювати величину часу запізнювання. 1 UA 95534 U 5 10 15 20 25 Працює пристрій наступним чином. При обертанні від електродвигуна 4 колеса пам'яті 2 з постійною швидкістю разом з ним обертаються пальці 3 і з'єднані з ним пружні еластичні стрічки 5, 6. Від підвищення вхідного тиску у пневмомеханічному перетворювачі 12 його мембранний виконавчий механізм з позиціонером, долаючи зусилля опору переміщенню пружини 10 фіксатора 7, переміщує шток 13 і через ролик 14 діє на еластичну стрічку 5, забезпечуючи установку пальців 3 і їх фіксацію відповідно змінюванню в часі вхідного тиску (сигналу). В результаті обертання колеса 2 через певний час, рівний часові запізнювання, пальці 3 через стрічку 6, з протилежного боку колеса 2, діють на ролик 18 і шток 17 головки 16 зчитування пневмомеханічного перетворювача 15, формуючи вихідний сигнал з необхідним запізненням відносно вхідного сигналу. Після проходження через перетворювач 15 і обертанні колеса 2 стрічка 5 надходить до ролика 14, який, взаємодіючи з нею, при проходженні через канавку повертає пальці 3 у вихідне положення, забезпечуючи подальше здійснення циклів. Таким чином, податливий еластичний зв'язок пальців за допомогою стрічок усуває нелінійності при взаємодії виконавчих механізмів перетворювачів з пальцями, а переміщення стрічок по кільцевій канавці забезпечує можливість роликам з круговою канавкою повертати пальці у вихідне положення. Використання запропонованого пристрою, у порівнянні з відомим, дасть можливість: - підвищити точність функціонування пристрою і відтворення амплітудно-частотної характеристики за рахунок усунення нелінійностей у взаємодії роликів з пальцями пневмомеханічних перетворювачів вхідних і вихідних сигналів; - підвищити ефективність використання оснащених даним пристроєм об'єктів і технологічного обладнання; - розширити функціональні можливості завдяки підсиленню вхідного сигналу і формуванню двох похідних від його змінювання з одночасним їх гідравлічним підсумовуванням; - розширити область застосування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Пристрій запізнювання пневмосигналів, що містить корпус, установлені на корпусі електродвигун, колесо пам'яті з пальцями, що приводиться від електродвигуна, пневмомеханічний перетворювач вхідних сигналів у вигляді мембранного виконавчого механізму з позиціонером і штоком, взаємодіючим з пальцями, пневмомеханічний перетворювач з головкою зчитування вихідних сигналів зі штоком, взаємодіючим з пальцями і зв'язаний з черв'ячним колесом з приводною ручкою настроювання часу запізнювання, який відрізняється тим, що в ньому додатково до торців пальців гвинтами закріплені перша і друга пружні еластичні стрічки з можливістю, при переміщенні пальців, деформуватися, а пальці фіксуються, розміщеними в отворах по радіусу колеса пам'яті, фіксаторами, виконаними у вигляді регулювальних гвинтів, взаємодіючих через сідло з одним торцем, установлених в отворах, пружин, протилежні торці яких через друге сідло взаємодіють з пальцями, причому штоки перетворювачів мають ролики з кільцевими канавками на торцях, з можливістю обертатися при взаємодії канавками з пружинами еластичними стрічками і повертати пальці у вихідне положення. 2 UA 95534 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
МПК: G05B 11/50
Мітки: запізнювання, пневмосигналів, пристрій
Код посилання
<a href="https://ua.patents.su/5-95534-pristrijj-zapiznyuvannya-pnevmosignaliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій запізнювання пневмосигналів</a>
Система комбінованого автоматичного регулювання об’єкта з великим часом запізнювання
Номер патенту: 100798
Опубліковано: 25.01.2013
Автори: Мінакова Наталія Олександрівна, Шуть Олександр Феліксович, Блонський Степан Денисович
МПК: G05B 11/32, G05B 11/42
Мітки: запізнювання, часом, об'єкта, комбінованого, система, регулювання, автоматичного, великим
Формула / Реферат:
Система комбінованого автоматичного регулювання об'єкта з великим часом запізнювання, яка включає основний регулятор з пропорційно-інтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока...
Пристрій для транспортування рулонів льону
Номер патенту: 38857
Опубліковано: 26.01.2009
Автори: Хайліс Гедаль Абрамович, Назарівський Олександр Васильович
МПК: A01D 45/06
Мітки: пристрій, транспортування, льону, рулонів
Формула / Реферат:
Пристрій для транспортування рулонів льону, який містить передню раму та пальці, який відрізняється тим, що передня рама змонтована на нижній передній частині рами трактора, передній вертикальний тримач з пальцями змонтований на передніх кінцях бокових балок, шарнірно зв'язаних з лівим і правим кронштейнами рами трактора, передня рама зв'язана з переднім вертикальним тримачем пальців через гідроциліндр з двома штоками, задній тримач з...
Пристрій пневматичний для усунення контрактур
Номер патенту: 38744
Опубліковано: 12.01.2009
Автори: Таршинов Ігор Вікторович, Зайцев Дмитро Валерійович
Мітки: пневматичний, усунення, контрактур, пристрій
Формула / Реферат:
Пристрій пневматичний для усунення контрактур, що має пневмоманжету з підвідними та відвідними патрубками для підключення до системи подання робочого середовища, засоби, регулюючі параметри робочого середовища, фіксатори манжети на робочій ділянці, а також електроннокерований пневматичний пристрій керування, який відрізняється тим, що пневмоманжета виконана у вигляді "рукавички", в якій між пальцями та долонею вбудований еластичний...
Розрівнюючий пристрій до бункерного роздавача кормів
Номер патенту: 50320
Опубліковано: 15.10.2002
Автори: Бондар Ігор Миколайович, Роговий Вітіслав Дем'янович
МПК: A01K 5/00
Мітки: бункерного, роздавача, пристрій, розрівнюючий, кормів
Формула / Реферат:
1. Розрівнюючий пристрій до бункерного роздавача кормів, який містить бункер з подавальним та вивантажувальним транспортерами, роторні пальцеві кормовідділювачі, пальцевий зчісувальний барабан і відбивач, який відрізняється тим, що пальцевий зчісувальний барабан обладнаний ексцентриковим пристроєм і встановлений над верхнім кормовідділювачем, причому пальці зчісувального барабана мають конічну форму.2. Розрівнюючий пристрій по п. 1,...
Пристрій для збирання рицини
Номер патенту: 37775
Опубліковано: 10.12.2008
Автори: Головін Сергій Володимирович, Надикто Володимир Трохимович, Леженкін Олександр Миколайович, Дідур Володимир Аксентійович
МПК: A01D 45/30, A01D 41/08
Мітки: пристрій, рицини, збирання
Формула / Реферат:
Пристрій для збирання рицини, що складається з рами, на якій встановлено очісуючий барабан, виконаний у вигляді циліндра, по твірних якого розташовані пальці, кожухи і приводи робочого органа, який відрізняється тим, що по краях барабана симетрично встановлені два конуси, а очісуючі пальці жорстко закріплені по твірних циліндричної і конічної частин барабана, причому відстань між очісуючими пальцями більше діаметра центрального стовбура...
Попередній патент: Набір композиційних деталей для створення об’ємної іграшки
Наступний патент: Вібраційний грохот
Випадковий патент: З`єднання деталі з валом