Спосіб реєстрації місцевизначеної врожайності
Номер патенту: 96902
Опубліковано: 12.12.2011
Автори: Захарін Фелікс Михайлович, Войтюк Дмитро Григорович, Аніскевич Леонід Володимирович
Формула / Реферат
Cпосіб реєстрації місцевизначеної врожайності, що передбачає вимірювання інтенсивності потоку зерна в бункер ![]() за допомогою датчика маси зерна і визначення бортовим навігаційним комплексом географічних оцінок координат
за допомогою датчика маси зерна і визначення бортовим навігаційним комплексом географічних оцінок координат ![]() та швидкості
та швидкості ![]() руху центра жатки комбайна з шириною захвату В, який відрізняється тим, що заздалегідь визначають експериментальну імпульсну перехідну функцію комбайна
руху центра жатки комбайна з шириною захвату В, який відрізняється тим, що заздалегідь визначають експериментальну імпульсну перехідну функцію комбайна ![]() , яку разом з інформацією про поточну інтенсивність подачі зерна в бункер використовують для оцінювання інтенсивності потоку зерна на жатці шляхом вирішення інтегрального рівняння
, яку разом з інформацією про поточну інтенсивність подачі зерна в бункер використовують для оцінювання інтенсивності потоку зерна на жатці шляхом вирішення інтегрального рівняння
Дюамеля динаміки потоків зерна вигляду
відносно підінтегральної функції ![]() , яка служить основою для реєстрації місцевизначеної врожайності за допомогою формули:
, яка служить основою для реєстрації місцевизначеної врожайності за допомогою формули:
![]() .
.
Текст
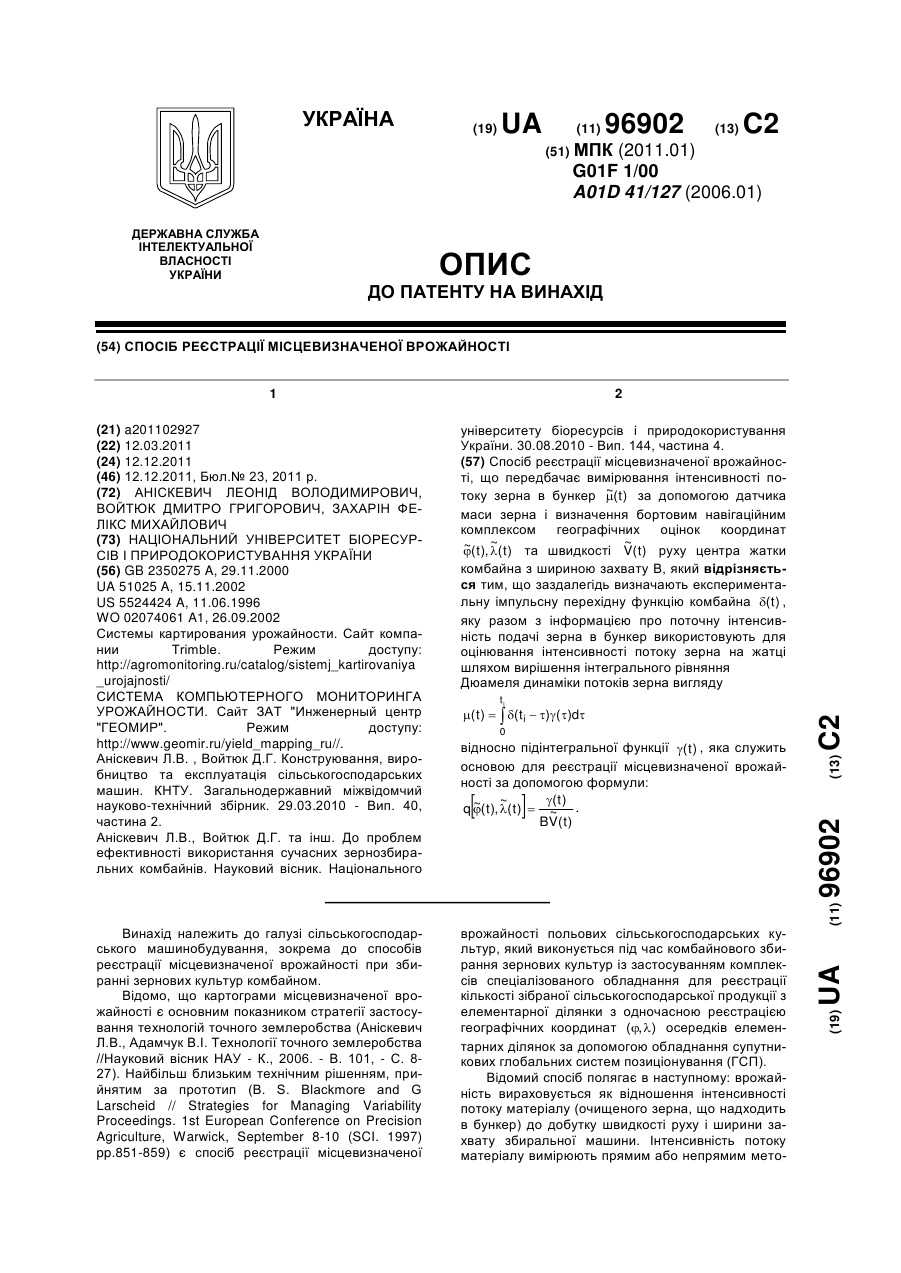
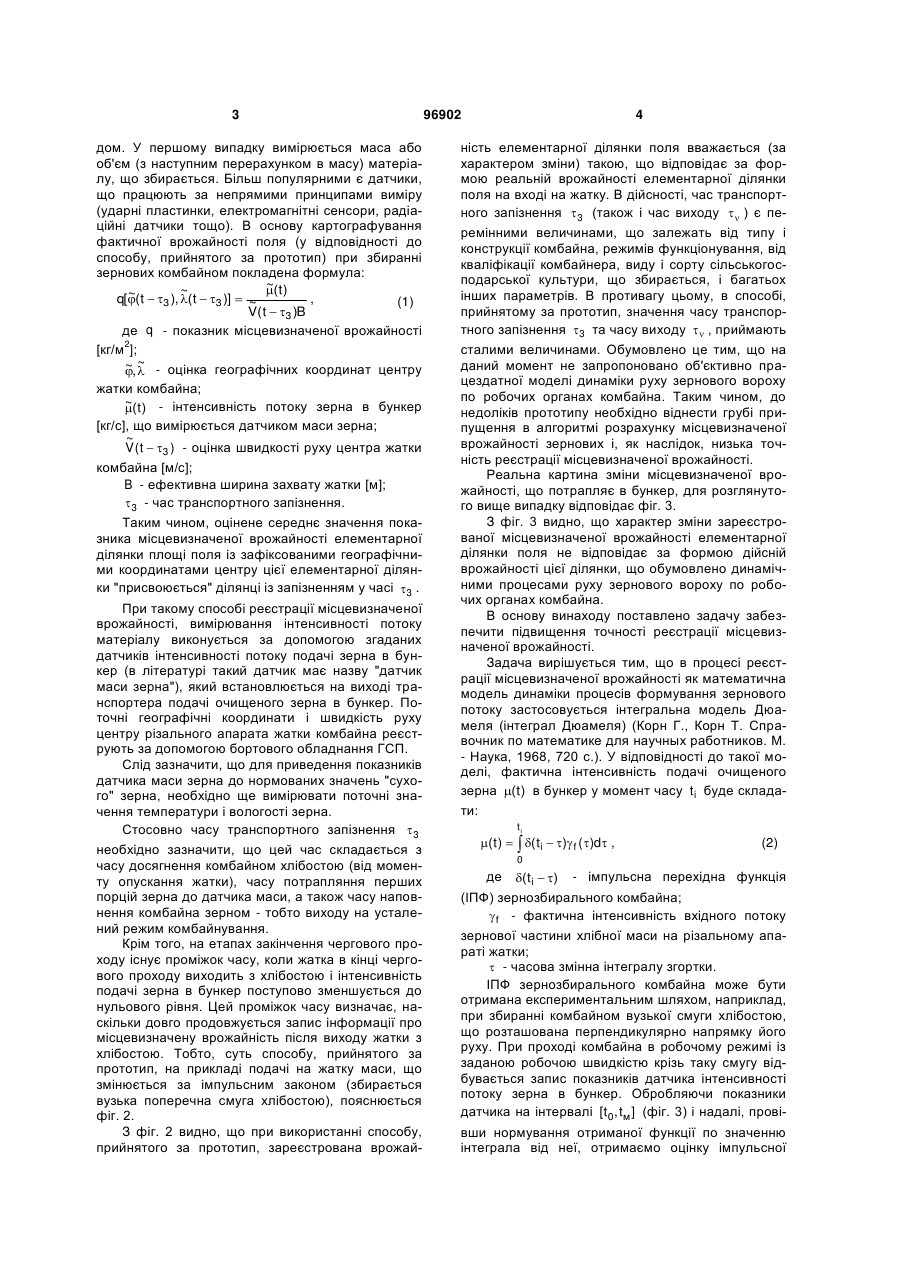
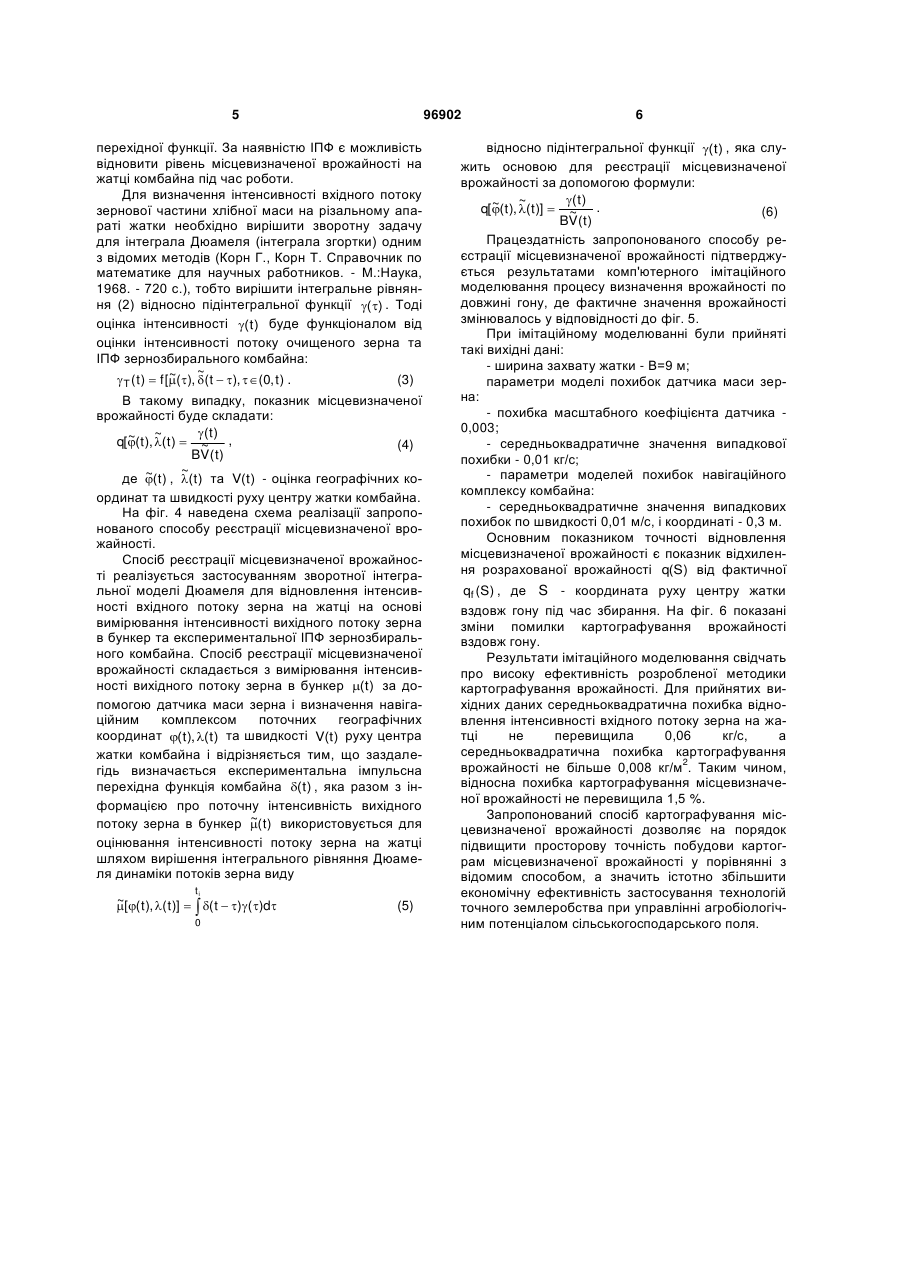
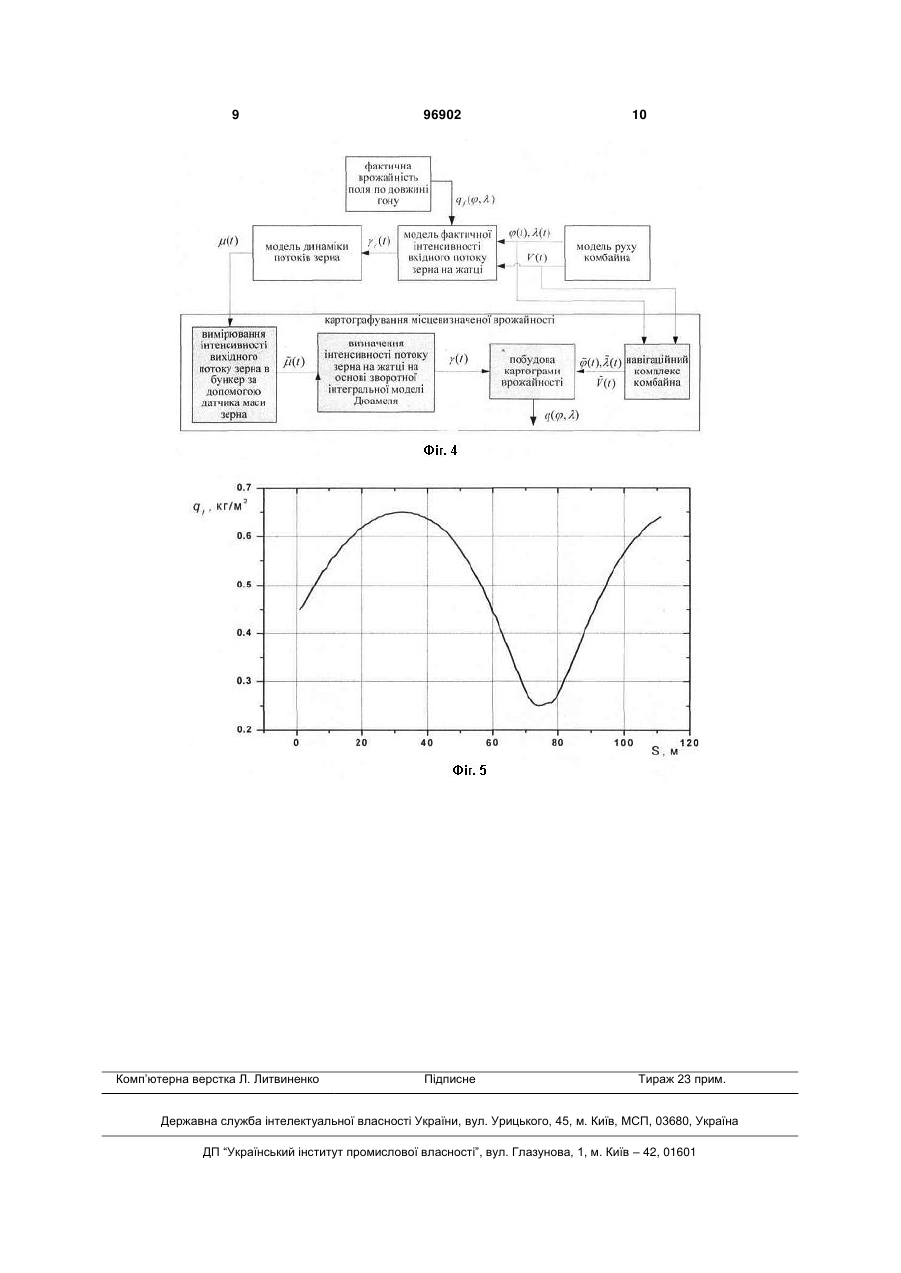
Cпосіб реєстрації місцевизначеної врожайності, що передбачає вимірювання інтенсивності по~ току зерна в бункер (t ) за допомогою датчика маси зерна і визначення бортовим навігаційним комплексом географічних оцінок координат ~ ~ ~ ( t ), ( t ) та швидкості V(t ) руху центра жатки Винахід належить до галузі сільськогосподарського машинобудування, зокрема до способів реєстрації місцевизначеної врожайності при збиранні зернових культур комбайном. Відомо, що картограми місцевизначеної врожайності є основним показником стратегії застосування технологій точного землеробства (Аніскевич Л.В., Адамчук В.І. Технології точного землеробства //Науковий вісник НАУ - К., 2006. - В. 101, - С. 827). Найбільш близьким технічним рішенням, прийнятим за прототип (В. S. Blackmore and G Larscheid // Strategies for Managing Variability Proceedings. 1st European Conference on Precision Agriculture, Warwick, September 8-10 (SCI. 1997) pp.851-859) є спосіб реєстрації місцевизначеної врожайності польових сільськогосподарських культур, який виконується під час комбайнового збирання зернових культур із застосуванням комплексів спеціалізованого обладнання для реєстрації кількості зібраної сільськогосподарської продукції з елементарної ділянки з одночасною реєстрацією географічних координат (, ) осередків елементарних ділянок за допомогою обладнання супутникових глобальних систем позиціонування (ГСП). Відомий спосіб полягає в наступному: врожайність вираховується як відношення інтенсивності потоку матеріалу (очищеного зерна, що надходить в бункер) до добутку швидкості руху і ширини захвату збиральної машини. Інтенсивність потоку матеріалу вимірюють прямим або непрямим мето комбайна з шириною захвату В, який відрізняється тим, що заздалегідь визначають експериментальну імпульсну перехідну функцію комбайна (t ) , яку разом з інформацією про поточну інтенсивність подачі зерна в бункер використовують для оцінювання інтенсивності потоку зерна на жатці шляхом вирішення інтегрального рівняння Дюамеля динаміки потоків зерна вигляду (13) 96902 (11) UA (19) 0 відносно підінтегральної функції (t ) , яка служить основою для реєстрації місцевизначеної врожайності за допомогою формули: ( t ) ~ ~ q ( t ), (t ) ~ . BV( t ) C2 ti ( t ) ( ti )( )d 3 дом. У першому випадку вимірюється маса або об'єм (з наступним перерахунком в масу) матеріалу, що збирається. Більш популярними є датчики, що працюють за непрямими принципами виміру (ударні пластинки, електромагнітні сенсори, радіаційні датчики тощо). В основу картографування фактичної врожайності поля (у відповідності до способу, прийнятого за прототип) при збиранні зернових комбайном покладена формула: ~ (t ) ~ ~ , q[( t 3 ), (t 3 )] ~ (1) V( t 3 )B де q - показник місцевизначеної врожайності 2 [кг/м ]; ~~ , - оцінка географічних координат центру жатки комбайна; ~ (t ) - інтенсивність потоку зерна в бункер [кг/с], що вимірюється датчиком маси зерна; ~ V( t 3 ) - оцінка швидкості руху центра жатки комбайна [м/с]; B - ефективна ширина захвату жатки [м]; 3 - час транспортного запізнення. Таким чином, оцінене середнє значення показника місцевизначеної врожайності елементарної ділянки площі поля із зафіксованими географічними координатами центру цієї елементарної ділянки "присвоюється" ділянці із запізненням у часі 3 . При такому способі реєстрації місцевизначеної врожайності, вимірювання інтенсивності потоку матеріалу виконується за допомогою згаданих датчиків інтенсивності потоку подачі зерна в бункер (в літературі такий датчик має назву "датчик маси зерна"), який встановлюється на виході транспортера подачі очищеного зерна в бункер. Поточні географічні координати і швидкість руху центру різального апарата жатки комбайна реєструють за допомогою бортового обладнання ГСП. Слід зазначити, що для приведення показників датчика маси зерна до нормованих значень "сухого" зерна, необхідно ще вимірювати поточні значення температури і вологості зерна. Стосовно часу транспортного запізнення 3 необхідно зазначити, що цей час складається з часу досягнення комбайном хлібостою (від моменту опускання жатки), часу потрапляння перших порцій зерна до датчика маси, а також часу наповнення комбайна зерном - тобто виходу на усталений режим комбайнування. Крім того, на етапах закінчення чергового проходу існує проміжок часу, коли жатка в кінці чергового проходу виходить з хлібостою і інтенсивність подачі зерна в бункер поступово зменшується до нульового рівня. Цей проміжок часу визначає, наскільки довго продовжується запис інформації про місцевизначену врожайністьпісля виходу жатки з хлібостою. Тобто, суть способу, прийнятого за прототип, на прикладі подачі на жатку маси, що змінюється за імпульсним законом (збирається вузька поперечна смуга хлібостою), пояснюється фіг. 2. З фіг. 2 видно, що при використанні способу, прийнятого за прототип, зареєстрована врожай 96902 4 ність елементарної ділянки поля вважається (за характером зміни) такою, що відповідає за формою реальній врожайності елементарної ділянки поля на вході на жатку. В дійсності, час транспортного запізнення 3 (також і час виходу ) є перемінними величинами, що залежать від типу і конструкції комбайна, режимів функціонування, від кваліфікації комбайнера, виду і сорту сільськогосподарської культури, що збирається, і багатьох інших параметрів. В противагу цьому, в способі, прийнятому за прототип, значення часу транспортного запізнення 3 та часу виходу , приймають сталими величинами. Обумовлено це тим, що на даний момент не запропоновано об'єктивно працездатної моделі динаміки руху зернового вороху по робочих органах комбайна. Таким чином, до недоліків прототипу необхідно віднести грубі припущення в алгоритмі розрахунку місцевизначеної врожайності зернових і, як наслідок, низька точність реєстрації місцевизначеної врожайності. Реальна картина зміни місцевизначеної врожайності, що потрапляє в бункер, для розглянутого вище випадку відповідає фіг. 3. З фіг. 3 видно, що характер зміни зареєстрованої місцевизначеної врожайності елементарної ділянки поля не відповідає за формою дійсній врожайності цієї ділянки, що обумовлено динамічними процесами руху зернового вороху по робочих органах комбайна. В основу винаходу поставлено задачу забезпечити підвищення точності реєстрації місцевизначеної врожайності. Задача вирішується тим, що в процесі реєстрації місцевизначеної врожайності як математична модель динаміки процесів формування зернового потоку застосовується інтегральна модель Дюамеля (інтеграл Дюамеля) (Корн Г., Корн Т. Справочник по математике для научных работников. М. - Наука, 1968, 720 с.). У відповідності до такої моделі, фактична інтенсивність подачі очищеного зерна (t) в бункер у момент часу t i буде складати: ti ( t ) ( ti ) f ( )d , (2) 0 де ( ti ) - імпульсна перехідна функція (ІПФ) зернозбирального комбайна; f - фактична інтенсивність вхідного потоку зернової частини хлібної маси на різальному апараті жатки; - часова змінна інтегралу згортки. ІПФ зернозбирального комбайна може бути отримана експериментальним шляхом, наприклад, при збиранні комбайном вузької смуги хлібостою, що розташована перпендикулярно напрямку його руху. При проході комбайна в робочому режимі із заданою робочою швидкістю крізь таку смугу відбувається запис показників датчика інтенсивності потоку зерна в бункер. Обробляючи показники датчика на інтервалі [t0, tм ] (фіг. 3) і надалі, провівши нормування отриманої функції по значенню інтеграла від неї, отримаємо оцінку імпульсної 5 96902 перехідної функції. За наявністю ІПФ є можливість відновити рівень місцевизначеної врожайності на жатці комбайна під час роботи. Для визначення інтенсивності вхідного потоку зернової частини хлібної маси на різальному апараті жатки необхідно вирішити зворотну задачу для інтеграла Дюамеля (інтеграла згортки) одним з відомих методів (Корн Г., Корн Т. Справочник по математике для научных работников. - М.:Наука, 1968. - 720 с.), тобто вирішити інтегральне рівняння (2) відносно підінтегральної функції () . Тоді оцінка інтенсивності (t ) буде функціоналом від оцінки інтенсивності потоку очищеного зерна та ІПФ зернозбирального комбайна: ~ ~ (3) T ( t ) f [( ), ( t ), (0, t ) . В такому випадку, показник місцевизначеної врожайності буде складати: ( t ) ~ ~ q[( t ), ( t ) ~ , (4) BV( t ) ~ ~ де (t ) , ( t ) та V(t) - оцінка географічних координат та швидкості руху центру жатки комбайна. На фіг. 4 наведена схема реалізації запропонованого способу реєстрації місцевизначеної врожайності. Спосіб реєстрації місцевизначеної врожайності реалізується застосуванням зворотної інтегральної моделі Дюамеля для відновлення інтенсивності вхідного потоку зерна на жатці на основі вимірювання інтенсивності вихідного потоку зерна в бункер та експериментальної ІПФ зернозбирального комбайна. Спосіб реєстрації місцевизначеної врожайності складається з вимірювання інтенсивності вихідного потоку зерна в бункер (t) за допомогою датчика маси зерна і визначення навігаційним комплексом поточних географічних координат (t ), (t ) та швидкості V(t) руху центра жатки комбайна і відрізняється тим, що заздалегідь визначається експериментальна імпульсна перехідна функція комбайна (t ) , яка разом з інформацією про поточну інтенсивність вихідного ~ потоку зерна в бункер (t ) використовується для оцінювання інтенсивності потоку зерна на жатці шляхом вирішення інтегрального рівняння Дюамеля динаміки потоків зерна виду ti ~ [( t ), ( t )] ( t )( )d 0 (5) 6 відносно підінтегральної функції (t ) , яка служить основою для реєстрації місцевизначеної врожайності за допомогою формули: ( t ) ~ ~ q[( t ), (t )] ~ . (6) BV( t ) Працездатність запропонованого способу реєстрації місцевизначеної врожайності підтверджується результатами комп'ютерного імітаційного моделювання процесу визначення врожайності по довжині гону, де фактичне значення врожайності змінювалось у відповідності до фіг. 5. При імітаційному моделюванні були прийняті такі вихідні дані: - ширина захвату жатки - В=9 м; параметри моделі похибок датчика маси зерна: - похибка масштабного коефіцієнта датчика 0,003; - середньоквадратичне значення випадкової похибки - 0,01 кг/с; - параметри моделей похибок навігаційного комплексу комбайна: - середньоквадратичне значення випадкових похибок по швидкості 0,01 м/с, і координаті - 0,3 м. Основним показником точності відновлення місцевизначеної врожайності є показник відхилення розрахованої врожайності q(S) від фактичної qf (S) , де S - координата руху центру жатки вздовж гону під час збирання. На фіг. 6 показані зміни помилки картографування врожайності вздовж гону. Результати імітаційного моделювання свідчать про високу ефективність розробленої методики картографування врожайності. Для прийнятих вихідних даних середньоквадратична похибка відновлення інтенсивності вхідного потоку зерна на жатці не перевищила 0,06 кг/с, а середньоквадратична похибка картографування 2 врожайності не більше 0,008 кг/м . Таким чином, відносна похибка картографування місцевизначеної врожайності не перевищила 1,5 %. Запропонований спосіб картографування місцевизначеної врожайності дозволяє на порядок підвищити просторову точність побудови картограм місцевизначеної врожайності у порівнянні з відомим способом, а значить істотно збільшити економічну ефективність застосування технологій точного землеробства при управлінні агробіологічним потенціалом сільськогосподарського поля. 7 96902 8 9 Комп’ютерна верстка Л. Литвиненко 96902 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for registration of location-determined yield
Автори англійськоюAniskevych Leonid Volodymyrovych, Voitiuk Dmytro Hryhorovych, Zakharin Feliks Mykhailovych
Назва патенту російськоюСпособ регистрации определенной местом урожайности
Автори російськоюАнискевич Леонид Владимирович, Войтюк Дмитрий Григорьевич, Захарин Феликс Михайлович
МПК / Мітки
МПК: G01F 1/00, A01D 41/127
Мітки: реєстрації, спосіб, врожайності, місцевизначеної
Код посилання
<a href="https://ua.patents.su/5-96902-sposib-reehstraci-misceviznacheno-vrozhajjnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб реєстрації місцевизначеної врожайності</a>
Привід роботизованої системи для збору польової місцевизначеної інформації
Номер патенту: 27003
Опубліковано: 10.10.2007
Автор: Броварець Олександр Олександрович
МПК: B60K 1/00
Мітки: збору, роботизованої, інформації, місцевизначеної, польової, привід, системі
Формула / Реферат:
Привід роботизованої системи для збору польової місцевизначеної інформації, що містить раму, ведучий міст, встановлений з можливістю переміщення відносно рами, пружний елемент, ведучі колеса з півосями, з'єднані трансмісією відповідно з ротором та статором, який відрізняється тим, що кожне з ведучих коліс роботизованої системи містить реверсивний електродвигун, який приводить їх в рух через трансмісію, причому трансмісія виконана у вигляді...
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком
Номер патенту: 77449
Опубліковано: 15.12.2006
Автори: Шинкарук Олег Миколайович, Лисий Микола Іванович
МПК: G08B 13/18, G01V 1/28
Мітки: сейсмічного, реєстрації, волоконно-оптичним, сигналу, датчиком, спосіб
Формула / Реферат:
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком, який полягає в тому, що застосовують волоконно-оптичний датчик решітчастого типу для визначення амплітуди сейсмічного сигналу, який відрізняється тим, що застосовують волоконно-оптичний датчик решітчастого типу з лінійно наростаючою шириною прозорих штрихів тільки в одній решітці, і базуючись на періодичності функції оптичного пропускання такого датчика, з послідовності...
Спосіб підвищення врожайності пшениці ярої
Номер патенту: 65661
Опубліковано: 15.04.2004
Автори: Лісовал Анатолій Петрович, Шатурський Ярослав Павлович, Шевченко Ярослав Олексійович
МПК: A01N 47/40
Мітки: врожайності, спосіб, пшениці, ярої, підвищення
Формула / Реферат:
Спосіб підвищення врожайності пшениці ярої шляхом передпосівної обробки насіння або вегетативної маси пшениці ярої водним розчином активної речовини, який відрізняється тим, що як активну речовину використовують гідройодид S-(2-метокси-2-феніл-етил)-ізотіосечовини формули:а її водний розчин готують у концентрації 0,05 мас.%.
Спосіб оцінки врожайності надземної маси ехінацеї блідої генеративного періоду онтогенезу
Номер патенту: 47442
Опубліковано: 10.02.2010
Автор: Поспєлов Сергій Вікторович
МПК: A01G 7/00
Мітки: блідої, надземної, спосіб, маси, ехінацеї, онтогенезу, генеративного, оцінки, періоду, врожайності
Формула / Реферат:
Спосіб оцінки врожайності надземної маси ехінацеї блідої генеративного періоду онтогенезу шляхом визначення параметрів рослини, який відрізняється тим, що визначають висоту і діаметр одного генеративного стебла, кількість стебел на один лінійний метр, а оцінку врожайності проводять за залежністю:,де: ВНМ - врожайність надземної маси, кг/га;ВСт - середня...
Спосіб підвищення врожайності пшениці м’якої озимої в умовах східного лісостепу україни
Номер патенту: 57592
Опубліковано: 10.03.2011
Автори: Глубокий Олександр Миколайович, Цехмейструк Микола Григорович, Матвієць Володимир Григорович, Костромітін Віктор Михайлович, Стрельцова Ірина Борисівна
МПК: A01C 21/00
Мітки: озимої, умовах, лісостепу, пшениці, спосіб, східного, м'якої, україни, підвищення, врожайності
Формула / Реферат:
Спосіб підвищення врожайності пшениці м'якої озимої в умовах східного Лісостепу України, який включає висів сидеральних культур на ґрунтах з важким механічним складом, який відрізняється тим, що озимі та ярі сидеральні культури висіваються в полі зайнятого пару.
Попередній патент: Залежна від rnti ініціалізація послідовності скремблювання
Наступний патент: Вихрова труба комбінована
Випадковий патент: Вібраційний змішувач