Привід роботизованої системи для збору польової місцевизначеної інформації
Формула / Реферат
Привід роботизованої системи для збору польової місцевизначеної інформації, що містить раму, ведучий міст, встановлений з можливістю переміщення відносно рами, пружний елемент, ведучі колеса з півосями, з'єднані трансмісією відповідно з ротором та статором, який відрізняється тим, що кожне з ведучих коліс роботизованої системи містить реверсивний електродвигун, який приводить їх в рух через трансмісію, причому трансмісія виконана у вигляді двоступінчастого редуктора - конічна та циліндрична передача, який обертає ланцюгову передачу, що забезпечує варіювання передаточного відношення.
Текст
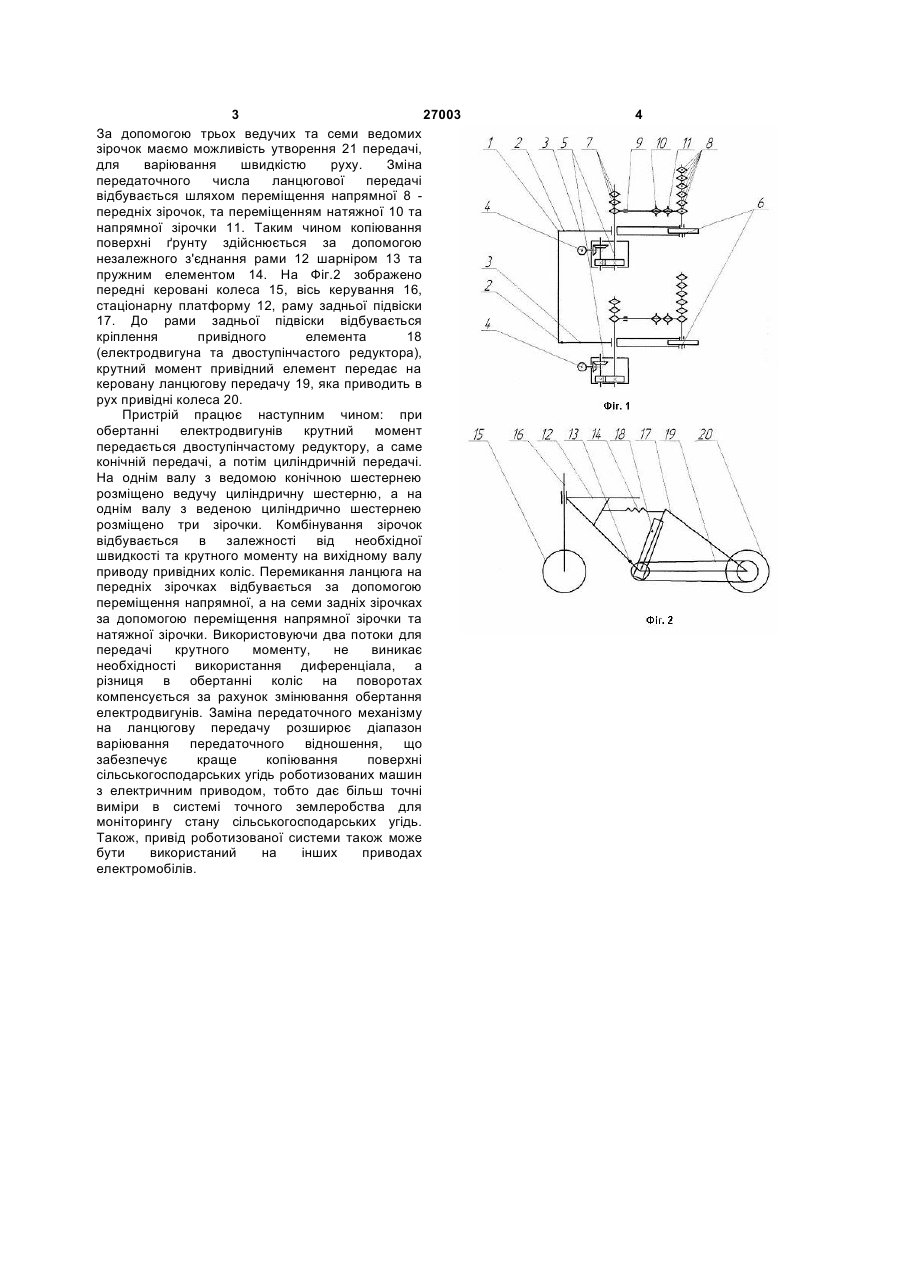
Привід роботизованої системи для збору польової місцевизначеної інформації, що містить раму, ведучий міст, встановлений з можливістю 3 27003 За допомогою трьох ведучих та семи ведомих зірочок маємо можливість утворення 21 передачі, для варіювання швидкістю руху. Зміна передаточного числа ланцюгової передачі відбувається шляхом переміщення напрямної 8 передніх зірочок, та переміщенням натяжної 10 та напрямної зірочки 11. Таким чином копіювання поверхні ґрунту здійснюється за допомогою незалежного з'єднання рами 12 шарніром 13 та пружним елементом 14. На Фіг.2 зображено передні керовані колеса 15, вісь керування 16, стаціонарну платформу 12, раму задньої підвіски 17. До рами задньої підвіски відбувається кріплення привідного елемента 18 (електродвигуна та двоступінчастого редуктора), крутний момент привідний елемент передає на керовану ланцюгову передачу 19, яка приводить в рух привідні колеса 20. Пристрій працює наступним чином: при обертанні електродвигунів крутний момент передається двоступінчастому редуктору, а саме конічній передачі, а потім циліндричній передачі. На однім валу з ведомою конічною шестернею розміщено ведучу циліндричну шестерню, а на однім валу з веденою циліндрично шестернею розміщено три зірочки. Комбінування зірочок відбувається в залежності від необхідної швидкості та крутного моменту на вихідному валу приводу привідних коліс. Перемикання ланцюга на передніх зірочках відбувається за допомогою переміщення напрямної, а на семи задніх зірочках за допомогою переміщення напрямної зірочки та натяжної зірочки. Використовуючи два потоки для передачі крутного моменту, не виникає необхідності використання диференціала, а різниця в обертанні коліс на поворотах компенсується за рахунок змінювання обертання електродвигунів. Заміна передаточного механізму на ланцюгову передачу розширює діапазон варіювання передаточного відношення, що забезпечує краще копіювання поверхні сільськогосподарських угідь роботизованих машин з електричним приводом, тобто дає більш точні виміри в системі точного землеробства для моніторингу стану сільськогосподарських угідь. Також, привід роботизованої системи також може бути використаний на інших приводах електромобілів. 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of robotized system for acquisition of field position finding information
Автори англійськоюBrovarets Oleksandr Oleksandrovych
Назва патенту російськоюПривод роботизированной системы для сбора полевой местоопределяющей информации
Автори російськоюБроварец Александр Александрович
МПК / Мітки
МПК: B60K 1/00
Мітки: польової, інформації, привід, збору, місцевизначеної, системі, роботизованої
Код посилання
<a href="https://ua.patents.su/2-27003-privid-robotizovano-sistemi-dlya-zboru-polovo-misceviznacheno-informaci.html" target="_blank" rel="follow" title="База патентів України">Привід роботизованої системи для збору польової місцевизначеної інформації</a>
Привід пересування металургійної машини
Номер патенту: 21500
Опубліковано: 15.03.2007
Автори: Добровольська Ірина Володимирівна, Пеклич Михайло Михайлович, Генералов Олег Олександрович, Маргуліс Михайло Володимирович, Чепурний Анатолій Данилович
МПК: F16H 1/04
Мітки: привід, пересування, машини, металургійної
Формула / Реферат:
Привід пересування металургійної машини, що містить хвильову зубчасту передачу, зовнішні зубчасті вінці жорсткого зубчастого колеса якої з'єднані з вузлом привідних коліс машини, який відрізняється тим, що привід обладнано віссю, на кінцях якої встановлені колеса, а між колесами на осі закріплено пару шестерень, які з'єднані із зубчастими вінцями жорсткого зубчастого колеса хвильової зубчастої передачі.
Спосіб збору і передачі супутникової інформації
Номер патенту: 68962
Опубліковано: 16.08.2004
Автори: Ставицький Сергій Дмитрович, Богом'я Володимир Іванович, Явтушенко Анатолій Миколайович, Козелков Сергій Вікторович
МПК: B64G 1/24
Мітки: інформації, передачі, супутникової, збору, спосіб
Формула / Реферат:
Спосіб збору і передачі супутникової інформації, при якому завантажують у базу даних цифрової обчислювальної машини отриману заявку на збір супутникової інформації, розраховують значення прогнозу руху штучного супутника Землі, розраховують значення обмежень за станом бортової апаратури, розраховують значення обмежень за технологічними даними наземної станції, розраховують значення зони огляду наземної станції, створюють програму граничного...
Привід круглов`язальної машини
Номер патенту: 25003
Опубліковано: 25.07.2007
Автори: Піпа Борис Федорович, Ловейкіна Світлана Олексіївна, Павленко Георгій Іванович
МПК: D04B 15/94
Мітки: круглов'язальної, привід, машини
Формула / Реферат:
Привід круглов'язальної машини, що містить електродвигун, клинопасову передачу, ведучий шків якої жорстко встановлений на валу електродвигуна, зубчасту передачу, ведуча шестірня якої встановлена на валу веденого шківа клинопасової передачі, та вертикальний привідний вал, на якому встановлено зубчасте колесо зубчастої передачі, кінематично за допомогою передач з'єднаний з механізмами в'язання та товароприйому, який відрізняється тим, що...
Електрогідравлічний привід інерційної гальмівної системи
Номер патенту: 76856
Опубліковано: 15.09.2006
Автор: Кошарний Андрій Миколайович
МПК: B60T 13/00, B60T 13/68
Мітки: привід, системі, інерційної, електрогідравлічний, гальмівної
Формула / Реферат:
Електрогідравлічний привід інерційної гальмівної системи, що містить давач стоп-сигналу, давач тиску, два електромагнітних відсічних клапани і головний гальмівний циліндр, поршень якого зв'язаний штоком із зчіпним пристроєм, робоча порожнина з'єднана гальмівною магістраллю з колісними гальмівними циліндрами через перший відсічний клапан, а компенсаційний резервуар зв'язаний з гальмівною магістраллю через другий відсічний клапан, який...
Привід круглов`язальної машини
Номер патенту: 26271
Опубліковано: 10.09.2007
Автори: Піпа Борис Федорович, Павленко Георгій Іванович, Марченко Анатолій Іванович
МПК: D04B 15/94
Мітки: привід, машини, круглов'язальної
Формула / Реферат:
1. Привід круглов'язальної машини, що містить з'єднані між собою за допомогою механічних передач електродвигун та вертикальний привідний вал, на кінцях якого жорстко закріплені ведучі елементи, кінематично з'єднані з веденими елементами передач, відповідно, механізму в'язання та механізму товароприйому, який відрізняється тим, що одна із механічних передач додатково містить демпфірувальний пристрій з пружними елементами, встановлений на...
Попередній патент: Мобільна лебідка
Наступний патент: Спосіб масового вирощування ентомофагів
Випадковий патент: Наконечник для статичного зондування ґрунтів