Спосіб стереофотограмметричного знімання місцевості
Номер патенту: 97338
Опубліковано: 25.01.2012
Автори: Бурачек Всеволод Германович, Караулов Дмитро Олександрович, Зацерковний Віталій Іванович, Беленок Вадим Юрійович, Дерун Ірина Юріївна
Формула / Реферат
Спосіб стереофотограмметричного знімання місцевості, заснований на використанні цифрової оптичної камери, GPS-приймача та комп'ютерної обробки даних, який відрізняється тим, що при кожній експозиції з заданою точністю визначають кути відхилення оптичної осі цифрової знімальної камери відносно вертикалі в двох взаємно перпендикулярних площинах (ZOX) та (ZOY), які відповідають осям фотоприймальної матриці, виконують класифікацію об'єктів, що виділяються на фоні місцевості, та оцифровку їх зображень для першої та другої експозиції і визначають на фотоприймальній матриці координати точки зеніту та точки нульового відліку відповідно до положення оптичної осі цифрової камери, при цьому за даними відхилення від вертикалі та різницями координат відліків зображень об'єктів по осях фотоприймальної матриці визначають висоти об'єктів, а за отриманими значеннями висот уточнюють значення ординат об'єктів місцевості.
Текст
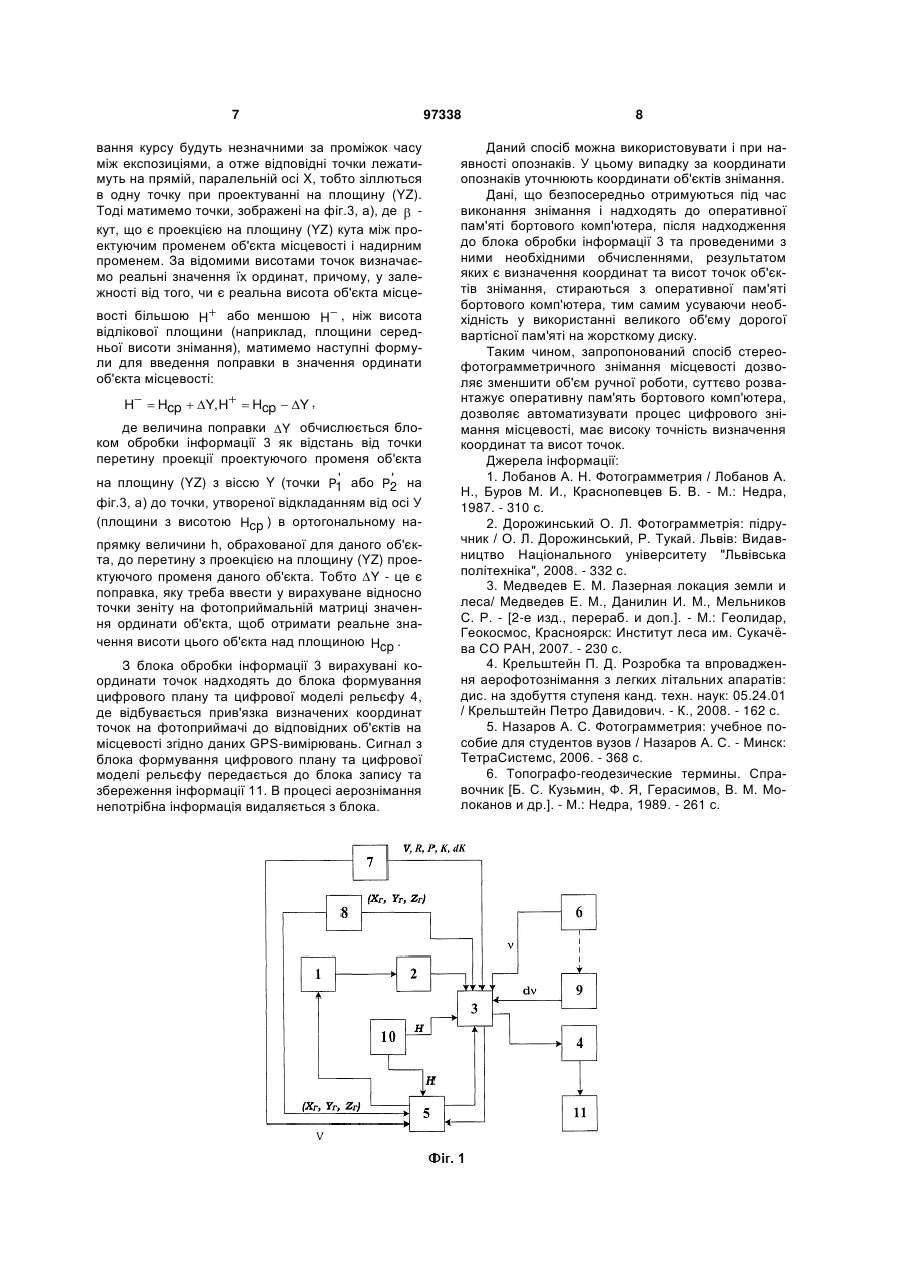
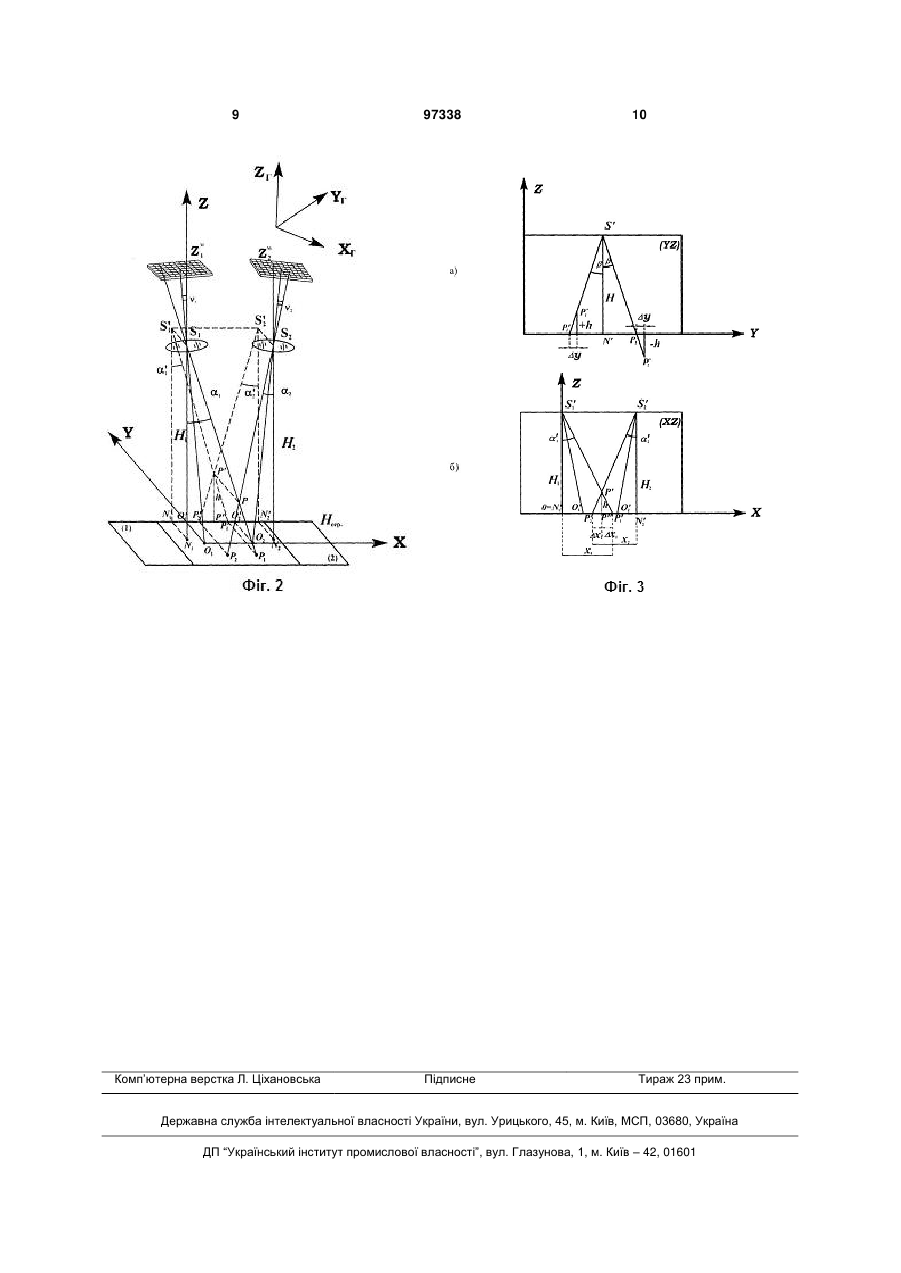
Спосіб стереофотограмметричного знімання місцевості, заснований на використанні цифрової 3 но-навігаційну систему, що фіксує кути нахилу платформи з лазером. В результаті отримують просторові координати точок об'єкта. До недоліків слід віднести низьку точність визначення планових координат і необхідність проведення додатково планового знімання [1, 2] з вищевказаними недоліками. Найбільш близьким технічним рішенням, вибраним як аналог, що приймається за прототип, є спосіб дистанційного цифрового знімання місцевості [2]. Спільними ознаками для прототипу і заявленого способу є застосування цифрових камер з багатоелементними фотоприймальними матрицями. Недоліки відомого способу аналога та прототипу наведені вище. В основу винаходу поставлено задачу створити спосіб стереофотограмметричного знімання місцевості, що забезпечує зниження обсягу ручної праці, повну автоматизацію процесу знімання та обробки отриманих даних при формуванні цифрової моделі місцевості в тривимірній системі координат. Поставлена задача вирішується за рахунок створення способу стереофотограмметричного знімання місцевості, заснованого на використанні цифрових оптичних камер, GPS-приймачів та комп'ютерної обробки даних, який відрізняється тим, що при кожній експозиції з заданою точністю визначають кути відхилення оптичної осі цифрової знімальної камери відносно вертикалі в двох взаємно перпендикулярних площинах (ZOX) та (ZOY), які відповідають осям фотоприймальної матриці, виконують класифікацію об'єктів, що виділяються на фоні місцевості, та оцифровку їх зображень для першої та другої експозиції, визначають на фотоприймальній матриці координати точки зеніту та точки нульового відліку відповідно положенню оптичної осі цифрової камери і за даними відхилення від вертикалі та різницями координат відліків зображень об'єктів по осях фотоприймальної матриці визначають висоти об'єктів, а за отриманими значеннями висот уточнюють значення ординат об'єктів місцевості. Технічним результатом є можливість побудови цифрового плану та цифрової моделі рельєфу місцевості безпосередньо в польоті, автоматизація процесу побудови та підвищення точності визначення координат точок при цифровому зніманні. На фіг.1 представлена схема пристрою, за допомогою якого реалізується запропонований спосіб, на якій відповідними цифрами позначено: 1 - цифрова знімальна камера (ЦЗК) з багатоелементним фотоприймачем (наприклад, ПЗЗматрицею); 2 - блок ранжування; 3 - блок обробки інформації; 4 - блок формування цифрового плану та цифрової моделі рельєфу; 5 - блок керування; 6 - точний датчик вертикалі; 7 - навігаційний блок; 8 - GPS-приймач; 9 - блок гіростабілізації; 97338 4 10 - лазерний висотомір з блоком випромінювання; 11 - блок запису та збереження інформації. Всі блоки встановлюються на літальному апараті (носії знімальної апаратури). З корпусом ЦЗК 1 жорстко зістикований блок гіростабілізації 9. До корпусу ЦЗК 1 жорстко пристикований точний датчик вертикалі 6, схемно з'єднаний також з блоком гіростабілізації 9, наприклад, за схемою датчика вертикалі, описаного в [4]. Блоки пристрою зв'язані між собою наступним чином: вихід ЦЗК 1 електрично пов'язаний зі входом блока ранжування 2, вхід ЦЗК 1 електрично пов'язаний з виходом блока керування 5; вихід блока ранжування 2 електрично пов'язаний з входом блока обробки інформації 3; один вихід блока обробки інформації 3 електрично пов'язаний з входом блока керування 5, інший вихід блока 3 електрично пов'язаний з входом блока формування цифрового плану та цифрової моделі рельєфу 4, блок обробки інформації 3 також має входи, електрично пов'язані з виходами блоків 5, 6, 7, 8, 9 і 10; вихід блока формування цифрового плану та цифрової моделі рельєфу 4 електрично пов'язаний з входом блока запису та збереження інформації 11; блок керування 5 також має входи, електрично пов'язані з виходами блоків 7, 8 і 10; вихід точного датчика вертикалі 6 оптичний пов'язаний з входом блока гіростабілізації 9. Пристрій працює по запропонованому способу наступним чином. На початку маршруту знімання за допомогою блока керування 5 вмикають усі прилади та блоки пристрою. При виконанні першої експозиції об'єктив ЦЗК 1 формує зображення місцевості на мішені багатоелементного фотоприймача ЦЗК 1. Зображення місцевості у фотоприймачі перетворюється на сукупність електричних сигналів, що надходять у блок ранжування 2. У блоці 2 відбувається класифікація об'єктів за контрастністю, розміром та відтінком. Ця інформація у вигляді електронних кодів надходить до блока обробки інформації 3. З GPS-приймача 8 до блока обробки інформації 3 та блока керування 5 періодично надходять сигнали з даними про точне положення точки знімання. Для визначення кута v відхилення оптичної осі ЦЗК 1 від вертикалі в моменти виконання знімання t зн використовують сумісну роботу датчика вертикалі 6 та блока гіростабілізації 9. Вісь гіроскопа блока 9 орієнтована в просторі в довільному напрямі. Датчик вертикалі 6 вимірює кути v( t засп ) відхилення оптичної осі ЦЗК 1 від вертикалі в моменти заспокоєння чутливого елемента датчика (наприклад, бульбашки, як в датчика, описаного в [4]) та передає результати вимірів до блока обробки інформації 3. В моменти заспокоєння чутливого елемента датчика 6 оптично виконується прив'язка до осі гіроскопа блока гіростабілізації 9, наприклад, за допомогою коліматора (це відображено оптичним зв'язком між блоками 6 і 9 на фіг.1). За інтервал часу між останнім моментом заспокоєння чутливого елемента датчика 6 t засп та моментом 5 виконання знімання t зн вісь гіроскопа може зміститися від положення, в якому вона перебувала до моменту заспокоєння чутливого елемента. Відхід осі гіроскопа dv(t засп t зн ) свідчить про відхилення оптичної осі ЦЗК 1 від вертикального положення. Виміряне значення цієї величини передається з блока гіростабілізації 9 до блока обробки інформації 3 і слугує для визначення величини відхилення від вертикалі в моменти виконання знімання. За допомогою застосовуваних у наш час гіростабілізуючих установок (наприклад, типу Н-55, ТАУ, ГУТ-9 та ін.), що використовують у своїй роботі триступеневі гіроскопи, можна стабілізувати положення знімальної камери з точністю 10-15' [5]. При використанні гіростабілізуючої установки можна досягнути значення кута відхилення оптичної осі АФА від прямовисного положення 30" [6]. Похибки гіроазимута характеризуються відходами осі гіроскопа в азимуті, які можуть становити від одиниць до десятих часток градуса за годину, що є достатнім для виконання знімання ЦЗК з високою точністю. За даними блока гіростабілізації 9 (гіроазимут) також враховують зміну азимута осі багатоелементного матричного фотоприймача ЦЗК 1 між експозиціями та визначають траєкторію шляху ЦЗК (носія) з врахуванням даних GPS. Отже, до блока обробки інформації 3 надходять: з навігаційного блока 7 - значення швидкості V руху носія, значення кутів крену R, тангажу Р, курсу K, коливання курсу dK, з датчика вертикалі 6 - кут відхилення оптичної осі ЦЗК від вертикалі v, з блока гіростабілізації 9 - кут відходу осі гіроскопа за інтервал часу [t засп; t зн ] , з блока лазерного висотоміра 10 - значення висоти знімання H, з GPS-приймача - координати центра знімання XГ , Y , Z . (фіг.1). На фіг.2 представлена схема реалізації запропонованого способу: S1 і S 2 - положення центрів знімання на одному базисі; ZM і ZM - положення точок зеніту на фотоп1 2 риймальних матрицях на одному базисі; N1 і N2 - положення точок надиру на одному базисі; H1 і H2 - висота знімання з одного базису; O1 і O2 - проекції на місцевість центрів багатоелементних фотоприймачів при двох послідовних зніманнях; (XYZ) - системи координат багатоелементного матричного фотоприймача, причому вісь X спрямована вздовж напрямку руху літального апарата, вісь Z - вздовж місцевої вертикалі, а вісь Y доповнює дану систему координат до правої; P1 і P2 - положення об'єкта знімання, отримане з базису знімання на проекціях на місцевості першого та другого багатоелементних фотоприймачів; 97338 6 1 і 2 - кути між надирними та проектуючими променями для базису знімання; v 1 і v 2 - кути відхилення від вертикалі; (1) і (2) - проекції на місцевість багатоелементних фотоприймальних матриць, отримані з одного базису знімання; h - висота об'єкта (точки Р) над відліковою площиною (наприклад, площиною середньої висоти знімання); ( X Y Z ) - геодезична система координат. Літерами зі штрихами на фіг.2 позначені проекції відповідних елементів на площину (XZ). Абсциси та ординати центрів знімання в геодезичній системі координат визначаються безпосередньо за відліками GPS. Відносно центрів знімання в геодезичній системі координат ( X Y Z ) обчислюються координати точки зеніту на фотоприймальній матриці (наприклад, ZM ), в якій зна1 ходиться початок системи координат матриці (XYZ). Відносно цієї точки визначаються координати об'єктів місцевості в системі (XYZ), що потім перераховуються в геодезичну систему координат ( X Y Z ) , при цьому в ординати вводиться поправка Y . Істинне значення висоти об'єкта (точки Р) відносно деякої відлікової площини (наприклад, площини середньої висоти знімання) - величина h визначається перетином відповідних проектуючих променів S1P1 і S2P2 . Це ілюструє фіг.3, б. З блока 1 до блока 3 надходять значення абсцис об'єк' ' тів місцевості, наприклад, точок P1 і P2 , у системі координат XYZ - це є відліки по фотоприймальній матриці, за якими обчислюється значення величини h : X1 X 2 , h H1 H2 (1) X1 X2 де X1 і X 2 - прирости абсцис об'єктів відносно точки зеніту на фотоприймальній матриці для проекцій матриць (1) і (2), відповідно; X1 і X 2 - значення абсцис об'єкта, відраховані відносно точок зеніту на фотоприймальній матриці. Якщо об'єкт розташований вище середньої висоти знімання Hcp , то значення його висоти буде перевищувати Hcp на величину h, тобто складатиме (Hcp h) , якщо нижче, то (Hcp h) . Вирахувані значення висот об'єктів передаються з блока обробки інформації 3 до блока формування цифрового плану та цифрової моделі рельєфу 4. Перехід від координат точок на фотоприймальній матриці до координат точок на місцевості можна виконати за відомими з фотограмметрії формулами зв'язку. Розглянемо проекцію елементів знімання на площину (YZ). Оскільки частота виконання експозицій ЦЗК є досить високою (наприклад, для ЦЗК DMC інтервал знімання складає 2 с/кадр), то коли 7 вання курсу будуть незначними за проміжок часу між експозиціями, а отже відповідні точки лежатимуть на прямій, паралельній осі X, тобто зіллються в одну точку при проектуванні на площину (YZ). Тоді матимемо точки, зображені на фіг.3, а), де кут, що є проекцією на площину (YZ) кута між проектуючим променем об'єкта місцевості і надирним променем. За відомими висотами точок визначаємо реальні значення їх ординат, причому, у залежності від того, чи є реальна висота об'єкта місцевості більшою H або меншою H , ніж висота відлікової площини (наприклад, площини середньої висоти знімання), матимемо наступні формули для введення поправки в значення ординати об'єкта місцевості: H Hcp Y, H Hcp Y , де величина поправки Y обчислюється блоком обробки інформації 3 як відстань від точки перетину проекції проектуючого променя об'єкта ' ' на площину (YZ) з віссю Y (точки P1 або P2 на фіг.3, а) до точки, утвореної відкладанням від осі У (площини з висотою Hcp ) в ортогональному напрямку величини h, обрахованої для даного об'єкта, до перетину з проекцією на площину (YZ) проектуючого променя даного об'єкта. Тобто Y - це є поправка, яку треба ввести у вирахуване відносно точки зеніту на фотоприймальній матриці значення ординати об'єкта, щоб отримати реальне значення висоти цього об'єкта над площиною Hcp . З блока обробки інформації 3 вирахувані координати точок надходять до блока формування цифрового плану та цифрової моделі рельєфу 4, де відбувається прив'язка визначених координат точок на фотоприймачі до відповідних об'єктів на місцевості згідно даних GPS-вимірювань. Сигнал з блока формування цифрового плану та цифрової моделі рельєфу передається до блока запису та збереження інформації 11. В процесі аерознімання непотрібна інформація видаляється з блока. 97338 8 Даний спосіб можна використовувати і при наявності опознаків. У цьому випадку за координати опознаків уточнюють координати об'єктів знімання. Дані, що безпосередньо отримуються під час виконання знімання і надходять до оперативної пам'яті бортового комп'ютера, після надходження до блока обробки інформації 3 та проведеними з ними необхідними обчисленнями, результатом яких є визначення координат та висот точок об'єктів знімання, стираються з оперативної пам'яті бортового комп'ютера, тим самим усуваючи необхідність у використанні великого об'єму дорогої вартісної пам'яті на жорсткому диску. Таким чином, запропонований спосіб стереофотограмметричного знімання місцевості дозволяє зменшити об'єм ручної роботи, суттєво розвантажує оперативну пам'ять бортового комп'ютера, дозволяє автоматизувати процес цифрового знімання місцевості, має високу точність визначення координат та висот точок. Джерела інформації: 1. Лобанов А. Н. Фотограмметрия / Лобанов А. Н., Буров М. И., Краснопевцев Б. В. - М.: Недра, 1987. - 310 с. 2. Дорожинський О. Л. Фотограмметрія: підручник / О. Л. Дорожинський, Р. Тукай. Львів: Видавництво Національного університету "Львівська політехніка", 2008. - 332 с. 3. Медведев Е. М. Лазерная локация земли и леса/ Медведев Е. М., Данилин И. М., Мельников С. Р. - [2-е изд., перераб. и доп.]. - М.: Геолидар, Геокосмос, Красноярск: Институт леса им. Сукачѐва СО РАН, 2007. - 230 с. 4. Крельштейн П. Д. Розробка та впровадження аерофотознімання з легких літальних апаратів: дис. на здобуття ступеня канд. техн. наук: 05.24.01 / Крельштейн Петро Давидович. - К., 2008. - 162 с. 5. Назаров А. С. Фотограмметрия: учебное пособие для студентов вузов / Назаров А. С. - Минск: ТетраСистемс, 2006. - 368 с. 6. Топографо-геодезические термины. Справочник [Б. С. Кузьмин, Ф. Я, Герасимов, В. М. Молоканов и др.]. - М.: Недра, 1989. - 261 с. 9 Комп’ютерна верстка Л. Ціхановська 97338 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stereo-photogrammetric survey of locality
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Derun Iryna Yuriivna, Zatserkovnyi Vitalii Ivanovych, Karaulov Dmytro Oleksandrovych
Назва патенту російськоюСпособ стереофотограмметрической съемки местности
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Дерун Ирина Юрьевна, Зацерковный Виталий Иванович, Караулов Дмитрий Александрович
МПК / Мітки
МПК: G01C 11/00
Мітки: стереофотограмметричного, знімання, місцевості, спосіб
Код посилання
<a href="https://ua.patents.su/5-97338-sposib-stereofotogrammetrichnogo-znimannya-miscevosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб стереофотограмметричного знімання місцевості</a>
Спосіб стереофотограмметричного знімання місцевості
Номер патенту: 64169
Опубліковано: 25.10.2011
Автори: Беленок Вадим Юрійович, Дерун Ірина Юріївна, Бурачек Всеволод Германович, Караулов Дмитро Олександрович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: стереофотограмметричного, знімання, місцевості, спосіб
Формула / Реферат:
Спосіб стереофотограмметричного знімання місцевості, заснований на використанні цифрової оптичної камери, GPS-приймача та комп'ютерної обробки даних, який відрізняється тим, що при кожній експозиції з заданою точністю визначають кути відхилення оптичної осі цифрової знімальної камери відносно вертикалі в двох взаємно перпендикулярних площинах (ZOX) та (ZOY), які відповідають осям фотоприймальної матриці, виконують класифікацію об'єктів, що...
Спосіб дистанційного знімання місцевості
Номер патенту: 49406
Опубліковано: 26.04.2010
Автори: Беленок Вадим Юрійович, Мороз Валерій Миколайович, Параніч Віктор Петрович, Бурачек Всеволод Германович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: дистанційного, спосіб, місцевості, знімання
Формула / Реферат:
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, при цьому лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямку з...
Спосіб та пристрій для дистанційного знімання місцевості
Номер патенту: 94163
Опубліковано: 11.04.2011
Автори: Бурачек Всеволод Германович, Беленок Вадим Юрійович, Мороз Валерій Миколайович, Параніч Віктор Петрович, Зацерковний Віталій Іванович
МПК: G01C 11/02
Мітки: спосіб, знімання, дистанційного, місцевості, пристрій
Формула / Реферат:
1. Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямі з різними...
Спосіб визначення плоских прямокутних координат контурних точок місцевості
Номер патенту: 60941
Опубліковано: 25.06.2011
Автори: Примаченко Костянтин Володимирович, Федченко Олексій Петрович, Пермяков Олександр Юрійович, Кравченко Юрій Васильович, Савченко Віталій Анатолійович, Машталір Вадим Віталійович, Брезіцький Едуард Юрійович, Шевченко Олексій Васильович, Чорнокнижний Олександр Анатолійович
МПК: G01S 5/02
Мітки: точок, координат, плоских, контурних, спосіб, місцевості, визначення, прямокутних
Формула / Реферат:
Спосіб визначення плоских прямокутних координат контурних точок місцевості, при якому вибирають растровий знімок аерокосмічного фотографування, завантажують знімок аерокосмічного фотографування у цифрову фотограмметричну станцію, здійснюють вимірювання плоских прямокутних координат контурних точок місцевості на растровому знімку аерокосмічного фотографування цифровою фотограмметричною станцією, який відрізняється тим, що додатково...
Спосіб задання координат області спостереження при плануванні космічного знімання
Номер патенту: 66361
Опубліковано: 26.12.2011
Автори: Петрожалко Володимир Володимирович, Фриз Сергій Петрович, Гуменюк Володимир Олександрович
МПК: G01C 11/00, B64G 4/00
Мітки: координат, спосіб, задання, знімання, спостереження, області, космічного, плануванні
Формула / Реферат:
Спосіб задання координат області спостереження при плануванні космічного знімання, при якому отримують завдання на проведення космічного знімання визначеної області земної поверхні, визначають область спостереження на карті, апроксимують область спостереження багатокутником за допомогою засобів креслень, визначають географічні координати вершин багатокутника, заносять визначені координати до заявки на проведення космічного знімання, який...
Попередній патент: Спосіб отримання покриття на кольорових сплавах
Наступний патент: Пристрій для розкидання сипкого матеріалу
Випадковий патент: Упаковка для квітів