Спосіб дистанційного знімання місцевості
Номер патенту: 49406
Опубліковано: 26.04.2010
Автори: Мороз Валерій Миколайович, Бурачек Всеволод Германович, Беленок Вадим Юрійович, Параніч Віктор Петрович, Зацерковний Віталій Іванович
Формула / Реферат
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, при цьому лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямку з різними швидкостями, вимірюють кутові величини повороту клинів, вираховують за цими даними координати точок на отриманій проекції спіралі на місцевості та перетворюють в систему координат цифрової камери і будують рельєф місцевості на отриманому цифровому плані.
Текст
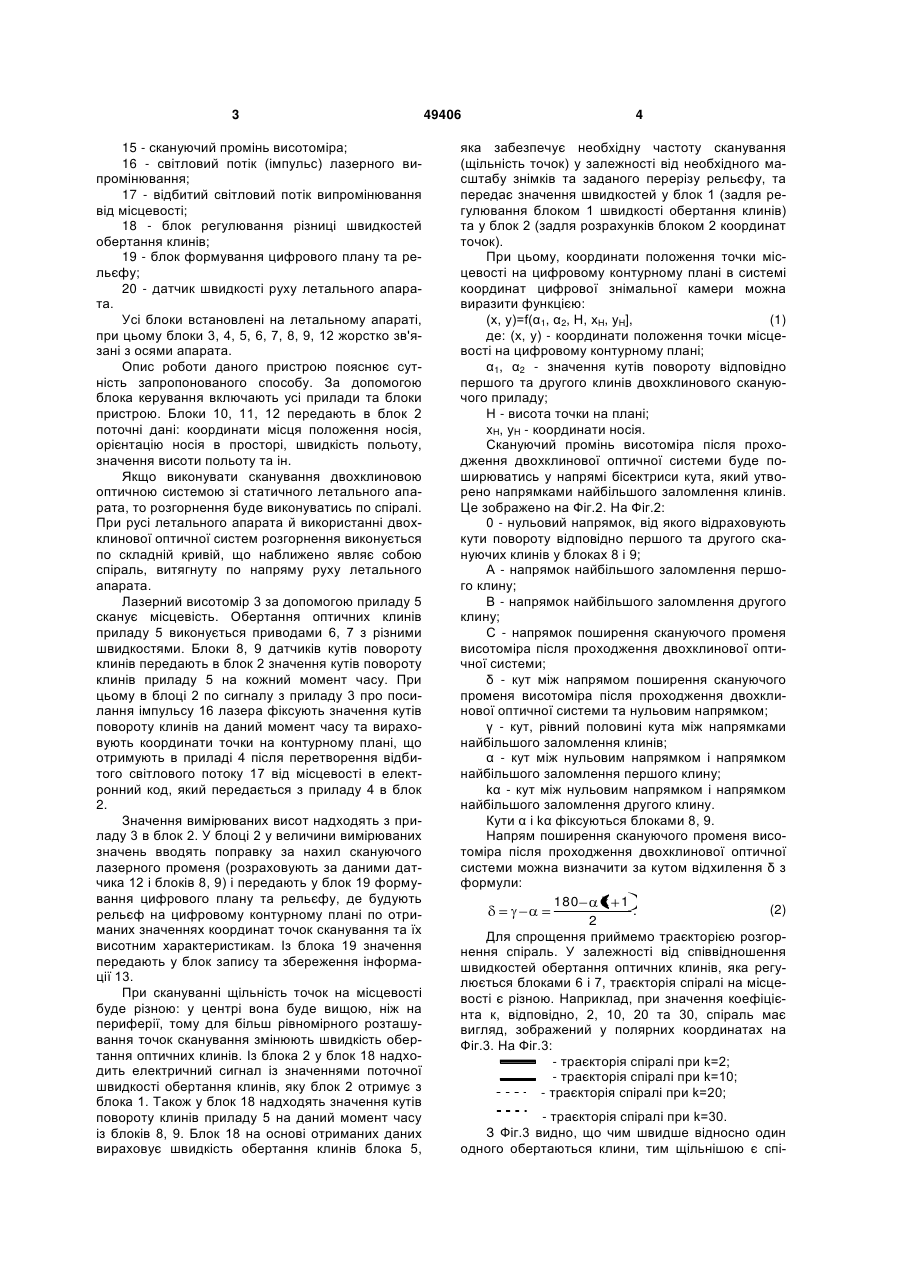
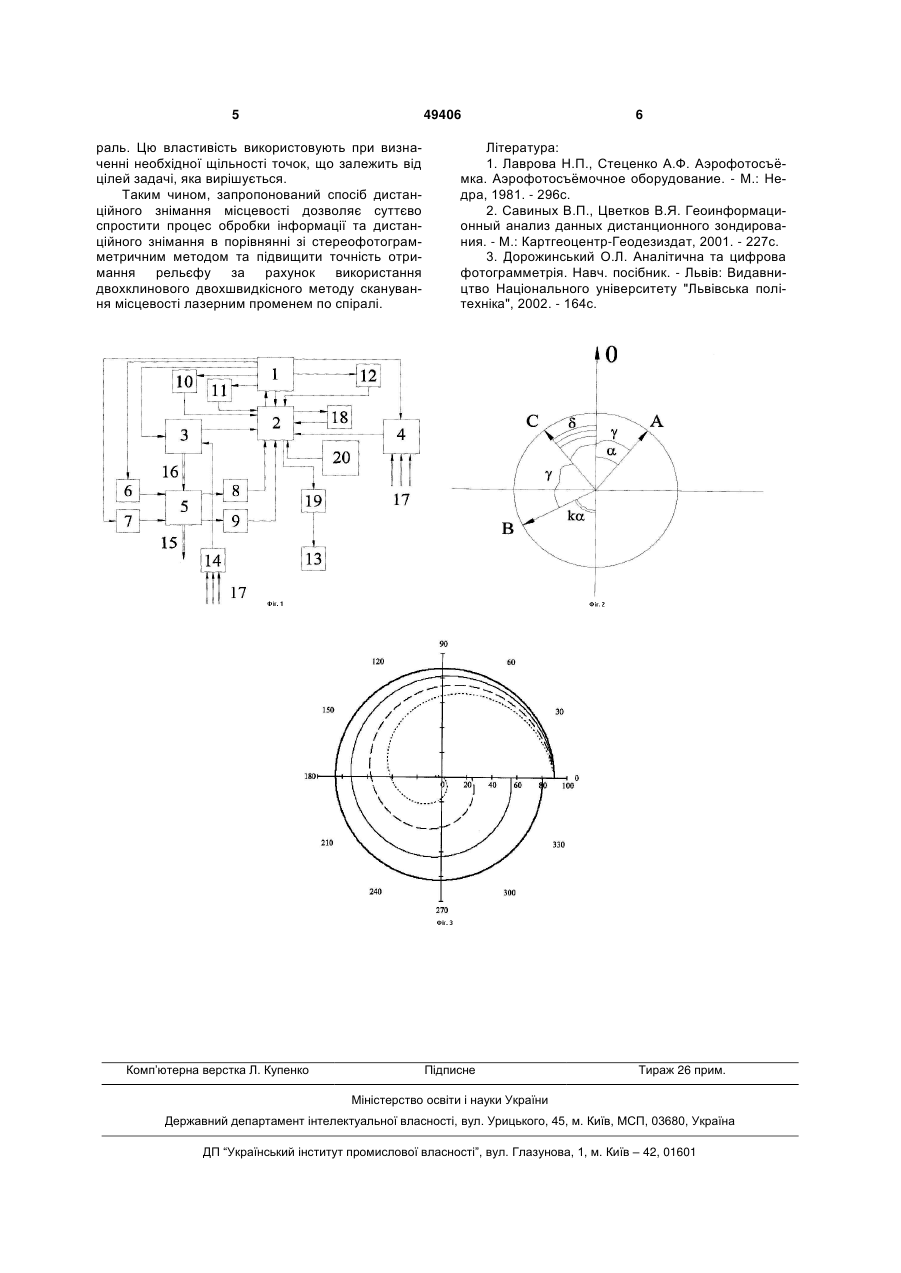
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, 3 15 - скануючий промінь висотоміра; 16 - світловий потік (імпульс) лазерного випромінювання; 17 - відбитий світловий потік випромінювання від місцевості; 18 - блок регулювання різниці швидкостей обертання клинів; 19 - блок формування цифрового плану та рельєфу; 20 - датчик швидкості руху летального апарата. Усі блоки встановлені на летальному апараті, при цьому блоки 3, 4, 5, 6, 7, 8, 9, 12 жорстко зв'язані з осями апарата. Опис роботи даного пристрою пояснює сутність запропонованого способу. За допомогою блока керування включають усі прилади та блоки пристрою. Блоки 10, 11, 12 передають в блок 2 поточні дані: координати місця положення носія, орієнтацію носія в просторі, швидкість польоту, значення висоти польоту та ін. Якщо виконувати сканування двохклиновою оптичною системою зі статичного летального апарата, то розгорнення буде виконуватись по спіралі. При русі летального апарата й використанні двохклинової оптичної систем розгорнення виконується по складній кривій, що наближено являє собою спіраль, витягнуту по напряму руху летального апарата. Лазерний висотомір 3 за допомогою приладу 5 сканує місцевість. Обертання оптичних клинів приладу 5 виконується приводами 6, 7 з різними швидкостями. Блоки 8, 9 датчиків кутів повороту клинів передають в блок 2 значення кутів повороту клинів приладу 5 на кожний момент часу. При цьому в блоці 2 по сигналу з приладу 3 про посилання імпульсу 16 лазера фіксують значення кутів повороту клинів на даний момент часу та вираховують координати точки на контурному плані, що отримують в приладі 4 після перетворення відбитого світлового потоку 17 від місцевості в електронний код, який передається з приладу 4 в блок 2. Значення вимірюваних висот надходять з приладу 3 в блок 2. У блоці 2 у величини вимірюваних значень вводять поправку за нахил скануючого лазерного променя (розраховують за даними датчика 12 і блоків 8, 9) і передають у блок 19 формування цифрового плану та рельєфу, де будують рельєф на цифровому контурному плані по отриманих значеннях координат точок сканування та їх висотним характеристикам. Із блока 19 значення передають у блок запису та збереження інформації 13. При скануванні щільність точок на місцевості буде різною: у центрі вона буде вищою, ніж на периферії, тому для більш рівномірного розташування точок сканування змінюють швидкість обертання оптичних клинів. Із блока 2 у блок 18 надходить електричний сигнал із значеннями поточної швидкості обертання клинів, яку блок 2 отримує з блока 1. Також у блок 18 надходять значення кутів повороту клинів приладу 5 на даний момент часу із блоків 8, 9. Блок 18 на основі отриманих даних вираховує швидкість обертання клинів блока 5, 49406 4 яка забезпечує необхідну частоту сканування (щільність точок) у залежності від необхідного масштабу знімків та заданого перерізу рельєфу, та передає значення швидкостей у блок 1 (задля регулювання блоком 1 швидкості обертання клинів) та у блок 2 (задля розрахунків блоком 2 координат точок). При цьому, координати положення точки місцевості на цифровому контурному плані в системі координат цифрової знімальної камери можна виразити функцією: (х, у)=f(α1, α2, Н, хН, уН], (1) де: (х, у) - координати положення точки місцевості на цифровому контурному плані; α1, α2 - значення кутів повороту відповідно першого та другого клинів двохклинового скануючого приладу; Н - висота точки на плані; xН, уН - координати носія. Скануючий промінь висотоміра після проходження двохклинової оптичної системи буде поширюватись у напрямі бісектриси кута, який утворено напрямками найбільшого заломлення клинів. Це зображено на Фіг.2. На Фіг.2: 0 - нульовий напрямок, від якого відраховують кути повороту відповідно першого та другого скануючих клинів у блоках 8 і 9; А - напрямок найбільшого заломлення першого клину; В - напрямок найбільшого заломлення другого клину; С - напрямок поширення скануючого променя висотоміра після проходження двохклинової оптичної системи; δ - кут між напрямом поширення скануючого променя висотоміра після проходження двохклинової оптичної системи та нульовим напрямком; γ - кут, рівний половині кута між напрямками найбільшого заломлення клинів; α - кут між нульовим напрямком і напрямком найбільшого заломлення першого клину; kα - кут між нульовим напрямком і напрямком найбільшого заломлення другого клину. Кути α і kα фіксуються блоками 8, 9. Напрям поширення скануючого променя висотоміра після проходження двохклинової оптичної системи можна визначити за кутом відхилення δ з формули: 180 k 1 (2) . 2 Для спрощення приймемо траєкторією розгорнення спіраль. У залежності від співвідношення швидкостей обертання оптичних клинів, яка регулюється блоками 6 і 7, траєкторія спіралі на місцевості є різною. Наприклад, при значення коефіцієнта к, відповідно, 2, 10, 20 та 30, спіраль має вигляд, зображений у полярних координатах на Фіг.3. На Фіг.3: - траєкторія спіралі при k=2; - траєкторія спіралі при k=10; - траєкторія спіралі при k=20; - траєкторія спіралі при k=30. З Фіг.3 видно, що чим швидше відносно один одного обертаються клини, тим щільнішою є спі 5 49406 раль. Цю властивість використовують при визначенні необхідної щільності точок, що залежить від цілей задачі, яка вирішується. Таким чином, запропонований спосіб дистанційного знімання місцевості дозволяє суттєво спростити процес обробки інформації та дистанційного знімання в порівнянні зі стереофотограмметричним методом та підвищити точність отримання рельєфу за рахунок використання двохклинового двохшвидкісного методу сканування місцевості лазерним променем по спіралі. Комп’ютерна верстка Л. Купенко 6 Література: 1. Лаврова Н.П., Стеценко А.Ф. Аэрофотосъѐмка. Аэрофотосъѐмочное оборудование. - М.: Недра, 1981. - 296с. 2. Савиных В.П., Цветков В.Я. Геоинформационный анализ данных дистанционного зондирования. - М.: Картгеоцентр-Геодезиздат, 2001. - 227с. 3. Дорожинський О.Л. Аналітична та цифрова фотограмметрія. Навч. посібник. - Львів: Видавництво Національного університету "Львівська політехніка", 2002. - 164с. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for remote survey of locality
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Moroz Valerii Mykolaiovych, Paranich Viktor Petrovych
Назва патенту російськоюСпособ дистанционной съемки местности
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Зацерковный Виталий Иванович, Мороз Валерий Николаевич, Паранич Виктор Петрович
МПК / Мітки
МПК: G01C 11/00
Мітки: знімання, місцевості, спосіб, дистанційного
Код посилання
<a href="https://ua.patents.su/3-49406-sposib-distancijjnogo-znimannya-miscevosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного знімання місцевості</a>
Спосіб дистанційного знімання даних
Номер патенту: 39546
Опубліковано: 25.02.2009
Автори: Коломейко Анатолій Вікторович, Нікітін Микола Михайлович, Шостак Олександр Тихонович, Волощук Ігор Вікторович, Шацман Леонід Георгійович
МПК: G01N 29/00, G01L 11/00
Мітки: дистанційного, даних, спосіб, знімання
Формула / Реферат:
1. Спосіб дистанційного знімання даних, при якому проводять підготовку чутливого елемента шляхом розміщення перетворювача поверхневих акустичних хвиль і відбивачів поверхневих акустичних хвиль на акустичному звукопроводі, формують за кількістю відбивачів поверхневих акустичних хвиль кількість акустичних трактів, встановлюють чутливий елемент, що містить акустичний звукопровід з розміщеними на ньому перетворювачем поверхневих акустичних хвиль...
Спосіб закріплення прямої лінії на місцевості
Номер патенту: 84362
Опубліковано: 10.10.2008
Автори: Колєнніков Андрій Петрович, Мороз Олександр Іванович, Вишневський Юрій Вікторович, Шевченко Тарас Георгійович
Мітки: закріплення, спосіб, лінії, місцевості, прямої
Формула / Реферат:
Спосіб закріплення прямої лінії на місцевості, згідно з яким закріплюють на місцевості допоміжну пряму двома кінцевими точками, координати яких відомі, і визначають її горизонтальну проекцію, позначають на місцевості дві кінцеві точки прямої, яку потрібно закріпити, визначають координати цих точок відносно відповідних кінцевих точок допоміжної прямої, визначають горизонтальні проекції віддалей між цими точками і закріплюють лінію на...
Автоматизована телеметрична система дистанційного знімання показників витратомірів без каналу зворотного зв`язку
Номер патенту: 35355
Опубліковано: 10.09.2008
Автори: Мітянкін Михайло Олександрович, Швидкий Валерій Васильович, Мітянкіна Тамара Вікторівна
МПК: G08B 25/01, H04L 27/00, H04B 3/54
Мітки: знімання, автоматизована, зв'язку, дистанційного, зворотного, система, показників, телеметрична, каналу, витратомірів
Формула / Реферат:
Автоматизована телеметрична система дистанційного знімання показників витратомірів енергоресурсів без каналу зворотного зв'язку в житлово-комунальному секторі народного господарства складається з витратомірів, що видають з випадковою періодичністю в мережу електроживлення інформацію про спожиті ресурси у центр збору та обробки даних, з'єднаних з пристроєм формування блока даних, пристроєм узгодження з електромережею і пристроєм керування, яка...
Спосіб розмінування ділянок місцевості від мін з магнітними підривачами
Номер патенту: 80999
Опубліковано: 26.11.2007
Автори: Петрівський Ігор Володимирович, Бондаренко Борис Маврович
МПК: F41H 11/00
Мітки: ділянок, місцевості, спосіб, магнітними, розмінування, мін, підривачами
Формула / Реферат:
Спосіб розмінування ділянок місцевості від мін з магнітними підривачами, при якому електромагнітне поле створюють за допомогою електромагнітної приставки до мінних тралів і цим самим приводять в дію магнітні підривачі, який відрізняється тим, що електромагнітне поле створюють над будь-якою точкою мінного поля за допомогою генератора лазерного випромінювання, променем якого сканують по мінному полю, над мінним полем розпилюють об'ємну...
Спосіб визначення радіоактивного забруднення місцевості
Номер патенту: 59823
Опубліковано: 15.09.2003
Автор: Лавренов Олег Миколайович
МПК: G21F 9/00
Мітки: місцевості, визначення, спосіб, радіоактивного, забруднення
Формула / Реферат:
Спосіб визначення радіоактивного забруднення місцевості (РМЗ), що включає збір даних про джерела радіоактивного забруднення місцевості і метеоумови, що поширюються на ці умови з наступною обробкою цих даних, який відрізняється тим, що збір даних виконують на основі вектора параметрів моделі радіоактивного забруднення місцевості, при цьому вихідні дані виконують у вигляді...
Попередній патент: Спосіб вдосконалення бензидинової проби при визначенні ступеня свіжості риби
Наступний патент: Спосіб вимірювання швидкості руху зовнішнього об’єкта
Випадковий патент: Спосіб кон'юнктиводакріоцисториностомії (лакоцисториностомії) у хворих з облітерацією слізних канальців і слізно-носової протоки після перенесеного запалення або травми