Спосіб та пристрій для дистанційного знімання місцевості
Номер патенту: 94163
Опубліковано: 11.04.2011
Автори: Беленок Вадим Юрійович, Бурачек Всеволод Германович, Параніч Віктор Петрович, Зацерковний Віталій Іванович, Мороз Валерій Миколайович
Формула / Реферат
1. Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямі з різними швидкостями, вимірюють кутові величини повороту клинів, вираховують по цих даних координати точок на отриманій проекції спіралі на місцевості і перетворюють в систему координат цифрової камери та будують рельєф місцевості на отриманому цифровому плані.
2. Пристрій для дистанційного знімання місцевості, що містить пару оптичних поворотних клинів з приводами і датчиками кутів повороту, який відрізняється тим, що він містить електрично зв'язаний з блоком обробки інформації блок регулювання різниці швидкостей обертання клинів, при цьому вхід блока керування електрично зв'язаний з виходом блока обробки інформації, виходи блока керування електрично зв'язані з відповідними входами блока обробки інформації, блока лазерного висотоміра з блоком випромінювання, блоків приводів відповідно першого та другого скануючих клинів, навігаційного приладу, приймача супутникових сигналів GPS, датчика вертикалі, цифрової знімальної камери, при цьому вихід блока обробки інформації електрично зв'язаний з входом блока регулювання різниці швидкостей обертання клинів, інший вихід блока обробки інформації електрично зв'язаний з входом блока формування цифрового контурного плану та побудови цифрової моделі рельєфу, входи блока обробки інформації електрично зв'язані з виходами датчика вертикалі, цифрової знімальної камери, блоків датчиків кутів повороту відповідно першого та другого скануючих клинів, лазерного висотоміра, навігаційного приладу, приймача супутникових сигналів GPS, датчика швидкості руху літального апарата, вихід лазерного висотоміра оптично зв'язаний з входом двоклинового скануючого приладу, вхід лазерного висотоміра електрично зв'язаний з виходом блока приймача лазерного висотоміра, вхід цифрової знімальної камери оптично зв'язаний з відбитим світловим потоком випромінювання від місцевості, два входи двоклинового скануючого приладу електрично зв'язані з відповідними виходами блоків приводів відповідно першого та другого скануючих клинів, два виходи двоклинового скануючого приладу електрично зв'язані з відповідними входами блоків датчиків кутів повороту відповідно першого та другого скануючих клинів, вхід блока приймача лазерного висотоміра оптично зв'язаний з відбитим світловим потоком випромінювання від місцевості, вихід блока формування цифрового контурного плану та побудови цифрової моделі рельєфу електрично зв'язаний з входом блока запису та збереження інформації, а вихід блока регулювання різниці швидкостей обертання клинів електрично зв'язаний з входом блока обробки інформації.
Текст
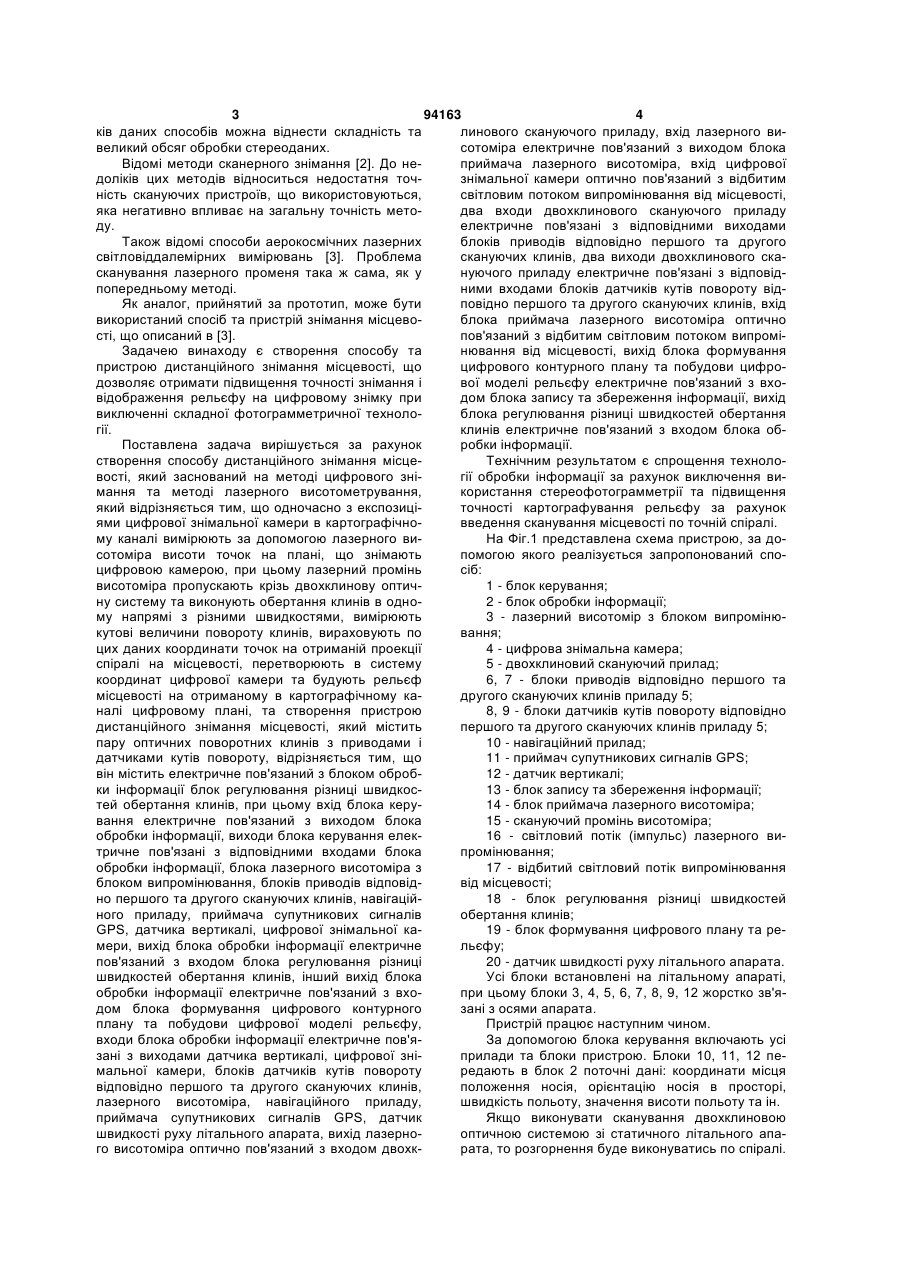
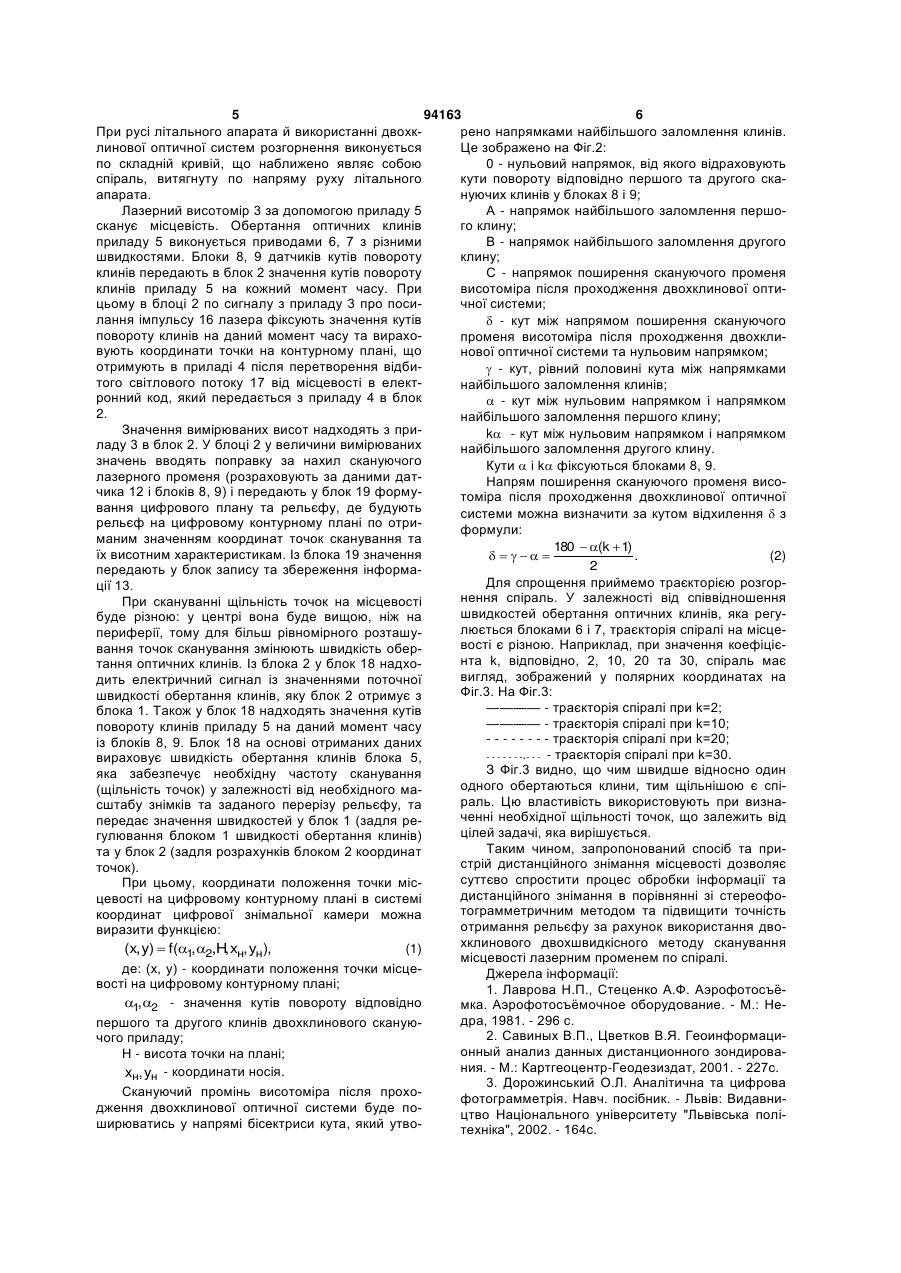
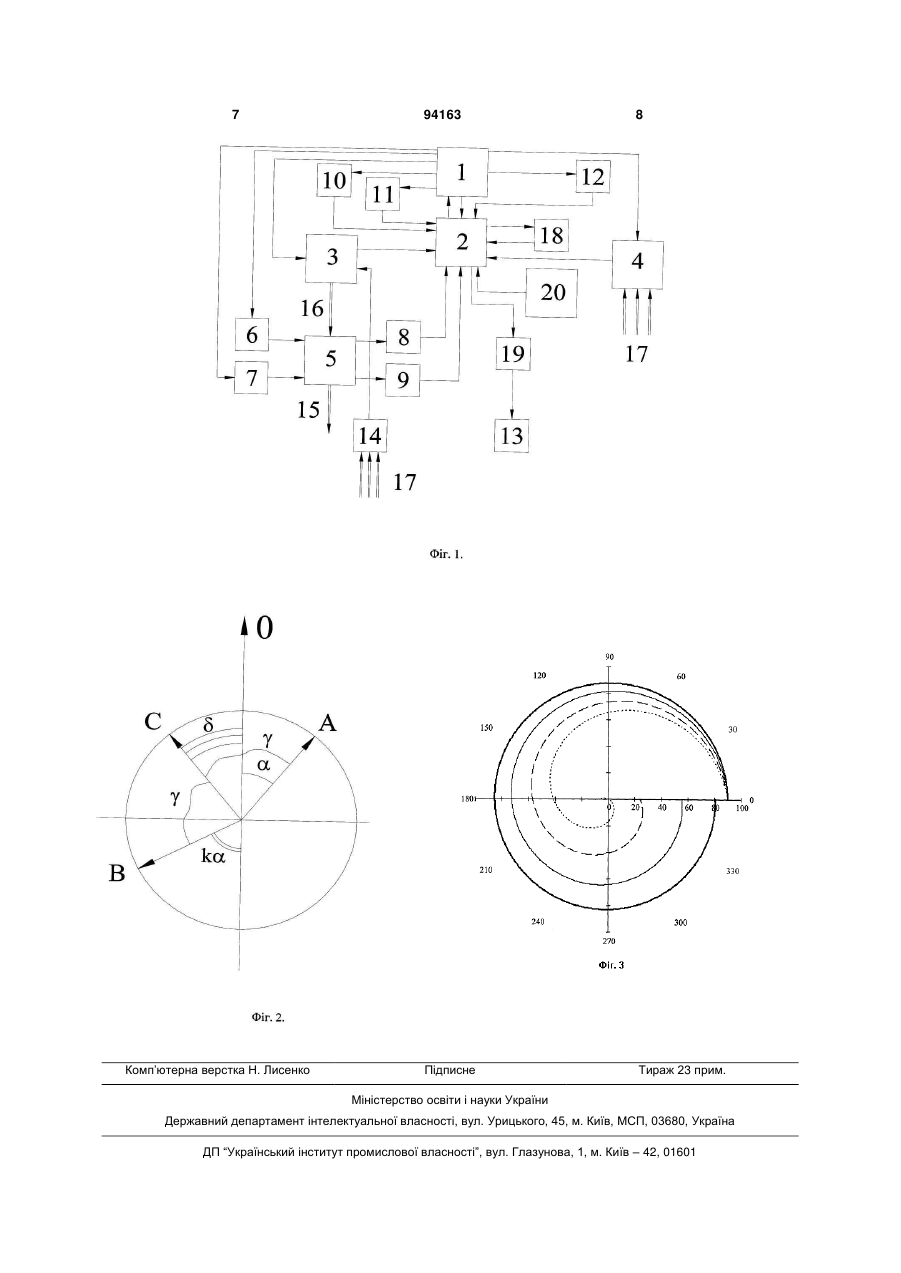
1. Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямі з різними швидкостями, вимірюють кутові величини повороту клинів, вираховують по цих даних координати точок на отриманій проекції спіралі на місцевості і перетворюють в систему координат цифрової камери та будують рельєф місцевості на отриманому цифровому плані. 2. Пристрій для дистанційного знімання місцевості, що містить пару оптичних поворотних клинів з приводами і датчиками кутів повороту, який відрізняється тим, що він містить електрично зв'язаний з блоком обробки інформації блок регулювання різниці швидкостей обертання клинів, при цьому вхід блока керування електрично зв'язаний з виходом блока обробки інформації, виходи блока C2 2 (19) 1 3 94163 4 ків даних способів можна віднести складність та линового скануючого приладу, вхід лазерного вивеликий обсяг обробки стереоданих. сотоміра електричне пов'язаний з виходом блока Відомі методи сканерного знімання [2]. До неприймача лазерного висотоміра, вхід цифрової доліків цих методів відноситься недостатня точзнімальної камери оптично пов'язаний з відбитим ність скануючих пристроїв, що використовуються, світловим потоком випромінювання від місцевості, яка негативно впливає на загальну точність методва входи двохклинового скануючого приладу ду. електричне пов'язані з відповідними виходами Також відомі способи аерокосмічних лазерних блоків приводів відповідно першого та другого світловіддалемірних вимірювань [3]. Проблема скануючих клинів, два виходи двохклинового скасканування лазерного променя така ж сама, як у нуючого приладу електричне пов'язані з відповідпопередньому методі. ними входами блоків датчиків кутів повороту відЯк аналог, прийнятий за прототип, може бути повідно першого та другого скануючих клинів, вхід використаний спосіб та пристрій знімання місцевоблока приймача лазерного висотоміра оптично сті, що описаний в [3]. пов'язаний з відбитим світловим потоком випроміЗадачею винаходу є створення способу та нювання від місцевості, вихід блока формування пристрою дистанційного знімання місцевості, що цифрового контурного плану та побудови цифродозволяє отримати підвищення точності знімання і вої моделі рельєфу електричне пов'язаний з вховідображення рельєфу на цифровому знімку при дом блока запису та збереження інформації, вихід виключенні складної фотограмметричної технолоблока регулювання різниці швидкостей обертання гії. клинів електричне пов'язаний з входом блока обПоставлена задача вирішується за рахунок робки інформації. створення способу дистанційного знімання місцеТехнічним результатом є спрощення техноловості, який заснований на методі цифрового знігії обробки інформації за рахунок виключення вимання та методі лазерного висотометрування, користання стереофотограмметрії та підвищення який відрізняється тим, що одночасно з експозиціточності картографування рельєфу за рахунок ями цифрової знімальної камери в картографічновведення сканування місцевості по точній спіралі. му каналі вимірюють за допомогою лазерного виНа Фіг.1 представлена схема пристрою, за досотоміра висоти точок на плані, що знімають помогою якого реалізується запропонований споцифровою камерою, при цьому лазерний промінь сіб: висотоміра пропускають крізь двохклинову оптич1 - блок керування; ну систему та виконують обертання клинів в одно2 - блок обробки інформації; му напрямі з різними швидкостями, вимірюють 3 - лазерний висотомір з блоком випромінюкутові величини повороту клинів, вираховують по вання; цих даних координати точок на отриманій проекції 4 - цифрова знімальна камера; спіралі на місцевості, перетворюють в систему 5 - двохклиновий скануючий прилад; координат цифрової камери та будують рельєф 6, 7 - блоки приводів відповідно першого та місцевості на отриманому в картографічному кадругого скануючих клинів приладу 5; налі цифровому плані, та створення пристрою 8, 9 - блоки датчиків кутів повороту відповідно дистанційного знімання місцевості, який містить першого та другого скануючих клинів приладу 5; пару оптичних поворотних клинів з приводами і 10 - навігаційний прилад; датчиками кутів повороту, відрізняється тим, що 11 - приймач супутникових сигналів GPS; він містить електричне пов'язаний з блоком оброб12 - датчик вертикалі; ки інформації блок регулювання різниці швидкос13 - блок запису та збереження інформації; тей обертання клинів, при цьому вхід блока керу14 - блок приймача лазерного висотоміра; вання електричне пов'язаний з виходом блока 15 - скануючий промінь висотоміра; обробки інформації, виходи блока керування елек16 - світловий потік (імпульс) лазерного витричне пов'язані з відповідними входами блока промінювання; обробки інформації, блока лазерного висотоміра з 17 - відбитий світловий потік випромінювання блоком випромінювання, блоків приводів відповідвід місцевості; но першого та другого скануючих клинів, навігацій18 - блок регулювання різниці швидкостей ного приладу, приймача супутникових сигналів обертання клинів; GPS, датчика вертикалі, цифрової знімальної ка19 - блок формування цифрового плану та ремери, вихід блока обробки інформації електричне льєфу; пов'язаний з входом блока регулювання різниці 20 - датчик швидкості руху літального апарата. швидкостей обертання клинів, інший вихід блока Усі блоки встановлені на літальному апараті, обробки інформації електричне пов'язаний з вхопри цьому блоки 3, 4, 5, 6, 7, 8, 9, 12 жорстко зв'ядом блока формування цифрового контурного зані з осями апарата. плану та побудови цифрової моделі рельєфу, Пристрій працює наступним чином. входи блока обробки інформації електричне пов'яЗа допомогою блока керування включають усі зані з виходами датчика вертикалі, цифрової зніприлади та блоки пристрою. Блоки 10, 11, 12 пемальної камери, блоків датчиків кутів повороту редають в блок 2 поточні дані: координати місця відповідно першого та другого скануючих клинів, положення носія, орієнтацію носія в просторі, лазерного висотоміра, навігаційного приладу, швидкість польоту, значення висоти польоту та ін. приймача супутникових сигналів GPS, датчик Якщо виконувати сканування двохклиновою швидкості руху літального апарата, вихід лазернооптичною системою зі статичного літального апаго висотоміра оптично пов'язаний з входом двохкрата, то розгорнення буде виконуватись по спіралі. 5 94163 6 При русі літального апарата й використанні двохкрено напрямками найбільшого заломлення клинів. линової оптичної систем розгорнення виконується Це зображено на Фіг.2: по складній кривій, що наближено являє собою 0 - нульовий напрямок, від якого відраховують спіраль, витягнуту по напряму руху літального кути повороту відповідно першого та другого скаапарата. нуючих клинів у блоках 8 і 9; Лазерний висотомір 3 за допомогою приладу 5 А - напрямок найбільшого заломлення першосканує місцевість. Обертання оптичних клинів го клину; приладу 5 виконується приводами 6, 7 з різними В - напрямок найбільшого заломлення другого швидкостями. Блоки 8, 9 датчиків кутів повороту клину; клинів передають в блок 2 значення кутів повороту С - напрямок поширення скануючого променя клинів приладу 5 на кожний момент часу. При висотоміра після проходження двохклинової оптицьому в блоці 2 по сигналу з приладу 3 про посичної системи; лання імпульсу 16 лазера фіксують значення кутів - кут між напрямом поширення скануючого повороту клинів на даний момент часу та вирахопроменя висотоміра після проходження двохкливують координати точки на контурному плані, що нової оптичної системи та нульовим напрямком; отримують в приладі 4 після перетворення відби - кут, рівний половині кута між напрямками того світлового потоку 17 від місцевості в електнайбільшого заломлення клинів; ронний код, який передається з приладу 4 в блок - кут між нульовим напрямком і напрямком 2. найбільшого заломлення першого клину; Значення вимірюваних висот надходять з приk - кут між нульовим напрямком і напрямком ладу 3 в блок 2. У блоці 2 у величини вимірюваних найбільшого заломлення другого клину. значень вводять поправку за нахил скануючого Кути і k фіксуються блоками 8, 9. лазерного променя (розраховують за даними датНапрям поширення скануючого променя височика 12 і блоків 8, 9) і передають у блок 19 формутоміра після проходження двохклинової оптичної вання цифрового плану та рельєфу, де будують системи можна визначити за кутом відхилення з рельєф на цифровому контурному плані по отриформули: маним значенням координат точок сканування та 180 (k 1) їх висотним характеристикам. Із блока 19 значення . (2) 2 передають у блок запису та збереження інформаДля спрощення приймемо траєкторією розгорції 13. нення спіраль. У залежності від співвідношення При скануванні щільність точок на місцевості швидкостей обертання оптичних клинів, яка регубуде різною: у центрі вона буде вищою, ніж на люється блоками 6 і 7, траєкторія спіралі на місцепериферії, тому для більш рівномірного розташувості є різною. Наприклад, при значення коефіцієвання точок сканування змінюють швидкість обернта k, відповідно, 2, 10, 20 та 30, спіраль має тання оптичних клинів. Із блока 2 у блок 18 надховигляд, зображений у полярних координатах на дить електричний сигнал із значеннями поточної Фіг.3. На Фіг.3: швидкості обертання клинів, яку блок 2 отримує з ———— - траєкторія спіралі при k=2; блока 1. Також у блок 18 надходять значення кутів ———— - траєкторія спіралі при k=10; повороту клинів приладу 5 на даний момент часу - - - - - - - - траєкторія спіралі при k=20; із блоків 8, 9. Блок 18 на основі отриманих даних - - - - - - -.- - - - траєкторія спіралі при k=30. вираховує швидкість обертання клинів блока 5, З Фіг.3 видно, що чим швидше відносно один яка забезпечує необхідну частоту сканування одного обертаються клини, тим щільнішою є спі(щільність точок) у залежності від необхідного мараль. Цю властивість використовують при визнасштабу знімків та заданого перерізу рельєфу, та ченні необхідної щільності точок, що залежить від передає значення швидкостей у блок 1 (задля рецілей задачі, яка вирішується. гулювання блоком 1 швидкості обертання клинів) Таким чином, запропонований спосіб та прита у блок 2 (задля розрахунків блоком 2 координат стрій дистанційного знімання місцевості дозволяє точок). суттєво спростити процес обробки інформації та При цьому, координати положення точки місдистанційного знімання в порівнянні зі стереофоцевості на цифровому контурному плані в системі тограмметричним методом та підвищити точність координат цифрової знімальної камери можна отримання рельєфу за рахунок використання двовиразити функцією: хклинового двохшвидкісного методу сканування (x, y) f(1, 2,H xн, ун), , (1) місцевості лазерним променем по спіралі. де: (х, у) - координати положення точки місцеДжерела інформації: вості на цифровому контурному плані; 1. Лаврова Н.П., Стеценко А.Ф. Аэрофотосъѐ1,2 - значення кутів повороту відповідно мка. Аэрофотосъѐмочное оборудование. - М.: Недра, 1981. - 296 с. першого та другого клинів двохклинового сканую2. Савиных В.П., Цветков В.Я. Геоинформацичого приладу; онный анализ данных дистанционного зондироваН - висота точки на плані; ния. - М.: Картгеоцентр-Геодезиздат, 2001. - 227с. xн, ун - координати носія. 3. Дорожинський О.Л. Аналітична та цифрова Скануючий промінь висотоміра після прохофотограмметрія. Навч. посібник. - Львів: Видавнидження двохклинової оптичної системи буде поцтво Національного університету "Львівська поліширюватись у напрямі бісектриси кута, який утвотехніка", 2002. - 164с. 7 Комп’ютерна верстка Н. Лиcенко 94163 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for remote survey of locality
Автори англійськоюBelenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Moroz Valerii Mykolaiovych, Paranich Viktor Petrovych
Назва патенту російськоюСпособ и устройство для дистанционной съемки местности
Автори російськоюБеленок Вадим Юрьевич, Бурачек Всеволод Германович, Зацерковный Виталий Иванович, Мороз Валерий Николаевич, Паранич Виктор Петрович
МПК / Мітки
МПК: G01C 11/02
Мітки: місцевості, знімання, пристрій, спосіб, дистанційного
Код посилання
<a href="https://ua.patents.su/4-94163-sposib-ta-pristrijj-dlya-distancijjnogo-znimannya-miscevosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для дистанційного знімання місцевості</a>
Спосіб дистанційного знімання місцевості
Номер патенту: 49406
Опубліковано: 26.04.2010
Автори: Зацерковний Віталій Іванович, Мороз Валерій Миколайович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Параніч Віктор Петрович
МПК: G01C 11/00
Мітки: спосіб, дистанційного, місцевості, знімання
Формула / Реферат:
Спосіб дистанційного знімання місцевості, що заснований на методі цифрової зйомки плану місцевості та методі лазерного висотометрування, який відрізняється тим, що одночасно з експозиціями цифрової знімальної камери вимірюють за допомогою лазерного висотоміра висоти точок на плані, що знімають цифровою камерою, при цьому лазерний промінь висотоміра пропускають крізь двоклинову оптичну систему та виконують обертання клинів в одному напрямку з...
Пристрій автоматизованого цифрового знімання предметів дорожнього комплексу
Номер патенту: 25855
Опубліковано: 27.08.2007
Автори: Васильєв Олександр Павлович, Залозна Оксана Анатоліївна, Шульц Роман Володимирович, Бурачек Всеволод Германович, Каракай Сергій Васильович
МПК: G01C 11/00
Мітки: цифрового, автоматизованого, комплексу, пристрій, предметів, знімання, дорожнього
Формула / Реферат:
1. Пристрій автоматизованого цифрового знімання предметів дорожнього комплексу, що містить блок цифрових камер, блок обробки інформації, блок запису та зберігання інформації, блок керування, який відрізняється тим, що містить паралелограмний блок з паралельною лінійкою, дві цифрові камери, жорстко закріплені на коротких елементах паралелограмного блока, який своєю основою закріплений на верхній частині корпусу дорожнього транспортного засобу,...
Спосіб дистанційного знімання даних
Номер патенту: 39546
Опубліковано: 25.02.2009
Автори: Волощук Ігор Вікторович, Шацман Леонід Георгійович, Коломейко Анатолій Вікторович, Нікітін Микола Михайлович, Шостак Олександр Тихонович
МПК: G01L 11/00, G01N 29/00
Мітки: даних, спосіб, дистанційного, знімання
Формула / Реферат:
1. Спосіб дистанційного знімання даних, при якому проводять підготовку чутливого елемента шляхом розміщення перетворювача поверхневих акустичних хвиль і відбивачів поверхневих акустичних хвиль на акустичному звукопроводі, формують за кількістю відбивачів поверхневих акустичних хвиль кількість акустичних трактів, встановлюють чутливий елемент, що містить акустичний звукопровід з розміщеними на ньому перетворювачем поверхневих акустичних хвиль...
Пристрій для автоматизованого цифрового знімання предметів дорожнього комплексу
Номер патенту: 86444
Опубліковано: 27.04.2009
Автори: Каракай Сергій Васильович, Залозна Оксана Анатоліївна, Шульц Роман Володимирович, Васильєв Олександр Павлович, Бурачек Всеволод Германович
МПК: G01C 11/00, G08G 1/00
Мітки: дорожнього, предметів, цифрового, автоматизованого, пристрій, комплексу, знімання
Формула / Реферат:
1. Пристрій для автоматизованого цифрового знімання предметів дорожнього комплексу, що містить блок цифрових камер, блок обробки інформації, блок запису та зберігання інформації, блок керування, який відрізняється тим, що в нього введені паралелограмний блок з паралельною лінійкою, причому дві цифрові камери жорстко закріплені на коротких елементах паралелограмного блока, який своєю основою закріплений на верхній частині корпусу дорожнього...
Автоматизована телеметрична система дистанційного знімання показників витратомірів без каналу зворотного зв`язку
Номер патенту: 35355
Опубліковано: 10.09.2008
Автори: Швидкий Валерій Васильович, Мітянкіна Тамара Вікторівна, Мітянкін Михайло Олександрович
МПК: H04L 27/00, H04B 3/54, G08B 25/01
Мітки: знімання, зворотного, показників, зв'язку, автоматизована, система, телеметрична, дистанційного, каналу, витратомірів
Формула / Реферат:
Автоматизована телеметрична система дистанційного знімання показників витратомірів енергоресурсів без каналу зворотного зв'язку в житлово-комунальному секторі народного господарства складається з витратомірів, що видають з випадковою періодичністю в мережу електроживлення інформацію про спожиті ресурси у центр збору та обробки даних, з'єднаних з пристроєм формування блока даних, пристроєм узгодження з електромережею і пристроєм керування, яка...
Попередній патент: Спосіб вимірювання амплітуди коливань дифузно відбиваючого об’єкта
Наступний патент: Роторно-лопатевий двигун
Випадковий патент: Спосіб стерилізації рідких середовищ