Спосіб введення графічної інформації в комп’ютер
Номер патенту: 102637
Опубліковано: 10.11.2015
Автори: Паламар Михайло Іванович, Стрембіцький Михайло Олексійович, Паламар Ярослав Михайлович

Формула / Реферат
Спосіб введення графічної інформації в комп'ютер, що полягає в зчитуванні комп'ютером параметрів маніпулятора переміщуваного по щонайменше двох координатах та контролі контакту маніпулятора з опорною поверхнею, який відрізняється тим, що параметри руху маніпулятора отримують шляхом обробки сигналів з MEMS акселерометра, причому сигнали з нього обробляють за такою формулою:
 ,
,
де:
![]() - переміщення об'єкта в і-й момент часу;
- переміщення об'єкта в і-й момент часу;
![]() - переміщення об'єкта в i-1-й момент часу;
- переміщення об'єкта в i-1-й момент часу;
![]() - швидкість об'єкта в і-й момент часу;
- швидкість об'єкта в і-й момент часу;
![]() - період часу між двома відліками датчика;
- період часу між двома відліками датчика;
![]() - прискорення об'єкта в i-1-й момент часу;
- прискорення об'єкта в i-1-й момент часу;
![]() - швидкість об'єкта в і-й момент часу.
- швидкість об'єкта в і-й момент часу.
Текст
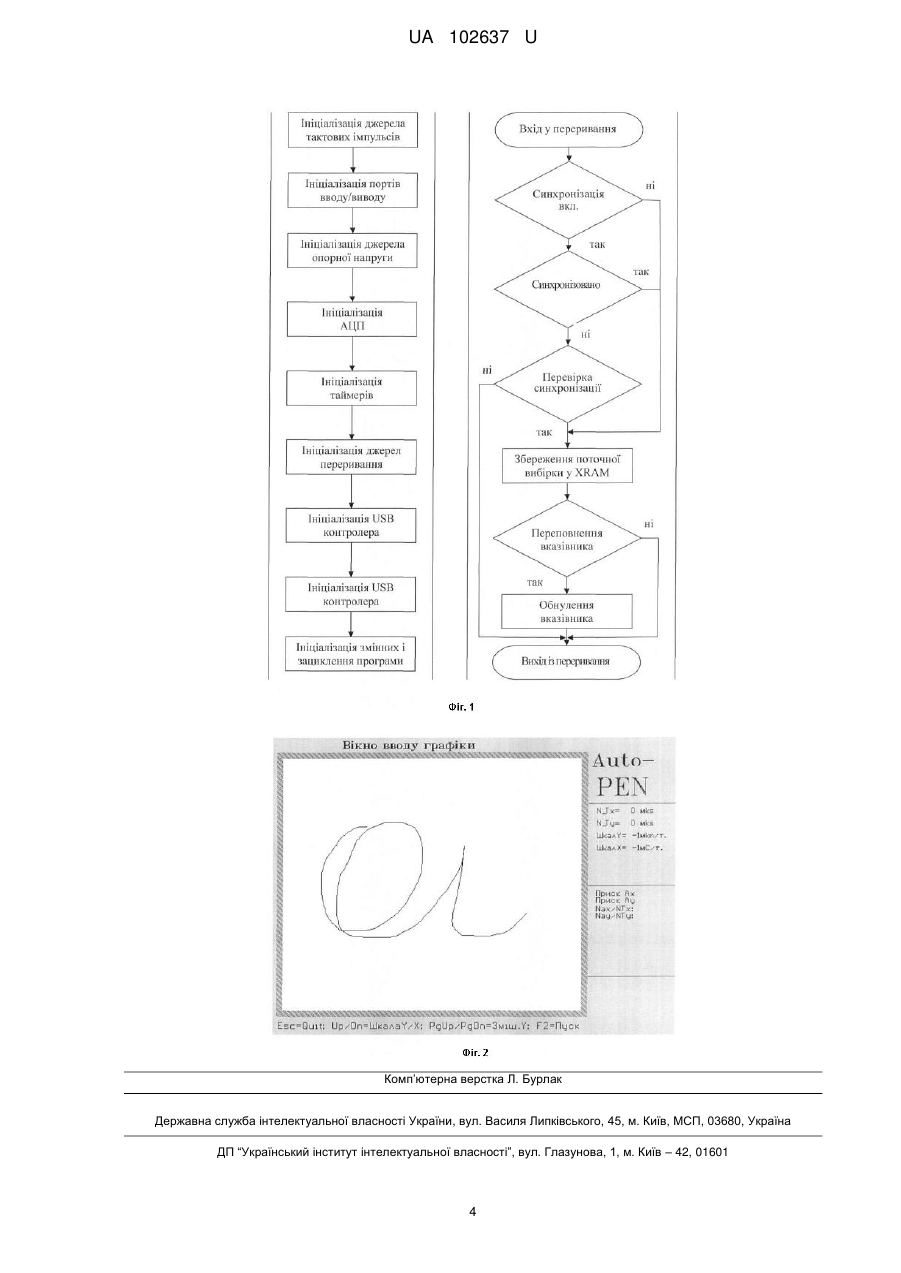
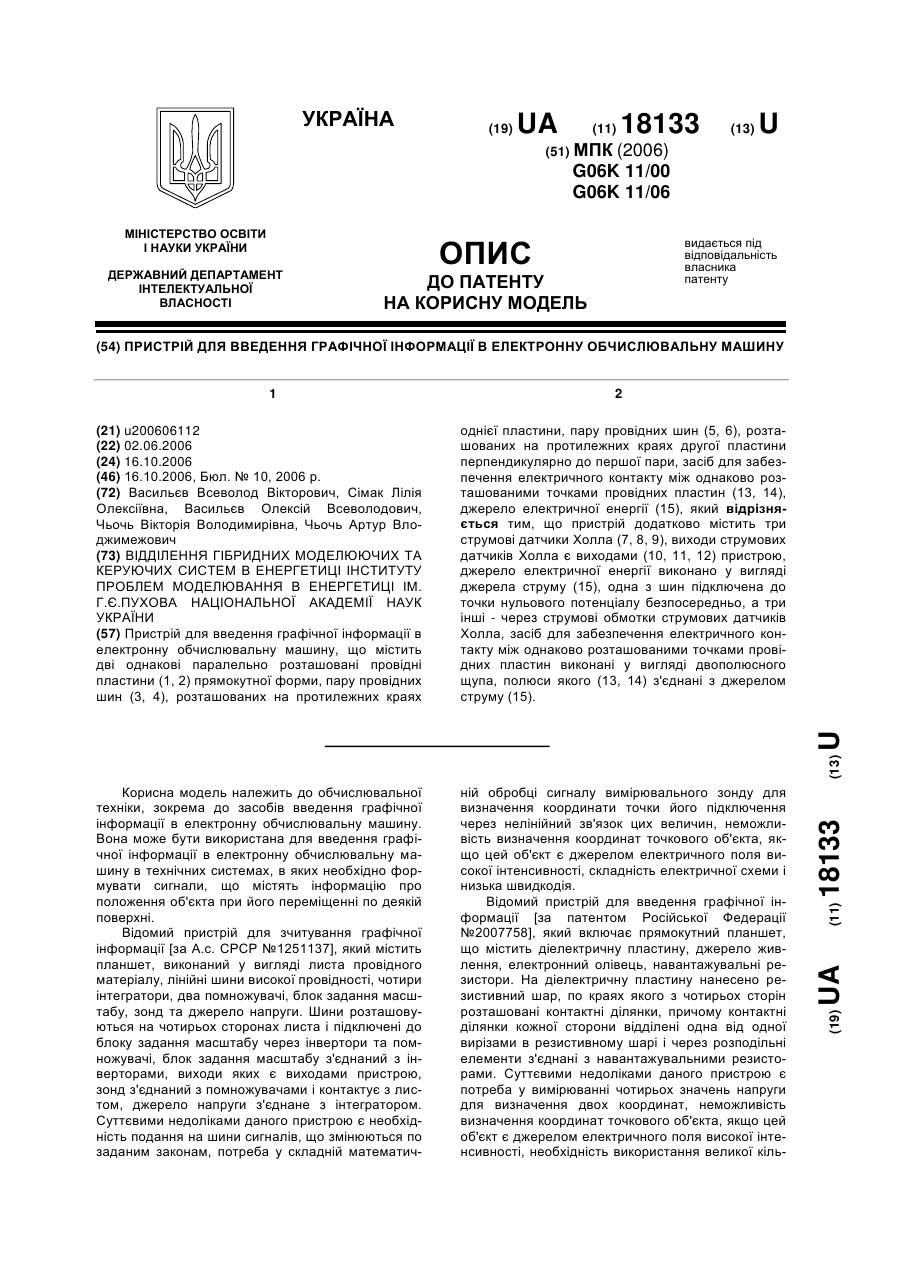
Реферат: Спосіб введення графічної інформації в комп'ютер полягає в зчитуванні комп'ютером параметрів маніпулятора переміщуваного по щонайменше двох координатах та контролі контакту маніпулятора з опорною поверхнею. Параметри руху маніпулятора отримують шляхом обробки сигналів з MEMS акселерометра, причому сигнали з нього обробляють за такою формулою: t 2 si si1 i1 t ai1 2 . a t i1 i1 i UA 102637 U (54) СПОСІБ ВВЕДЕННЯ ГРАФІЧНОЇ ІНФОРМАЦІЇ В КОМП'ЮТЕР UA 102637 U UA 102637 U 5 10 15 20 Корисна модель належить до галузі обчислювальної техніки, а саме до вказівних периферійних пристроїв, і може застосовуватись в дизайнерській справі та для вводу користувачем як графічних даних в комп'ютер, так і рукописного тексту. Відомий спосіб введення графічної інформації в комп'ютері із планшета, який є робочою поверхнею, що містить масив індукційних котушок та блок опрацювання, що визначає положення пера, яке індукує сигнал в поверхні приймача (див. патент US 2010/0212976 МПК G06F 3/033, 2010). Недоліком згаданого способу є використання спеціальної робочої поверхні для проведення введення даних у комп'ютер з допомогою пера. Найближчим за технічною суттю та результатом є спосіб введення графічної інформації в комп'ютер, що полягає в зчитуванні комп'ютером параметрів маніпулятора переміщуваного по щонайменше двох координатах та контролі контакту маніпулятора з опорною поверхнею (Див. патент US 8199132 МПК C06F 3/033, 2012). В основу корисної моделі спосіб введення графічної інформації в комп'ютер поставлена задача підвищення інформативності отриманих даних із MEMS акселерометра для отримання двомірної координати його положення на площині просторі, шляхом введення графічної інформації в комп'ютер, що полягає в зчитуванні комп'ютером параметрів маніпулятора переміщуваного по щонайменше двох координатах та контролі контакту маніпулятора з опорною поверхнею, причому параметри руху маніпулятора отримують шляхом обробки сигналів з MEMS акселерометра, причому сигнали з нього обробляють за такою формулою: t 2 si si1 i1 t ai1 2 a t i1 i1 i , де: si - переміщення об'єкта в і-й момент часу; 25 si1 - переміщення об'єкта в i-1-й момент часу; i1 - швидкість об'єкта в і-й момент часу; t - період часу між двома відліками датчика; ai1 - прискорення об'єкта в i-1-й момент часу; 30 i - швидкість об'єкта в і-й момент часу. На фіг. 1 показано блок-схему отримання даних із MEMS акселерометра, на фіг. 2 показано отримане зображення введення в комп'ютер. Спосіб введення графічної інформації в комп'ютер виконується наступним чином. Вихідним значенням є прискорення, зі значення якого можна визначити поточне значення положення, використовуючи наступні формули відповідно для координати x(t) a y(t). t 2 2 xt ( a x d)d t1 1 , (1) t 2 2 yt ( a x d)d 35 40 t1 1 , (2) де t , , - деякі моменти часу, τ (0;θ), θ (0;t), ах(τ) - значення прискорення в момент часу τ. Тому у такому виконанні способу в загальному комп'ютер замінює операцію інтегрування підсумовуванням невеликих проміжків. Якщо х - вектор шляху, спроектований на вісь ОХ, то використовують наступну формулу: xi 45 i k a j t 2 k 1j1 . (3) Аналогічно отримано формулу для вектора шляху у, спроектованого на вісь OY. Завдяки скінченній тривалості часу вимірювання прискорення, шлях розбивають на маленькі ділянки. Чим менші періоди часу Δt між відліками датчика, тим більше можна вважати рух рівнозмінним на них. Для визначення траєкторії руху в запропонованому способі використовують формулу (3), за якою процесор постійно відслідковує значення прискорення, швидкості і координати об'єкта, 1 UA 102637 U кожного разу добавляючи або віднімаючи значення зміщення, здійсненого ним за проміжок часу Δt: 5 t 2 si si1 i1 t ai1 2 a t i1 i1 i , (4) де: si - переміщення об'єкта в і-й момент часу; si1 - переміщення об'єкта в i-1-й момент часу; i1 - швидкість об'єкта в і-й момент часу; t - період часу між двома відліками датчика; ai1 - прискорення об'єкта в i-1-й момент часу; 10 15 20 25 30 35 i - швидкість об'єкта в і-й момент часу. Спочатку проводять ініціалізацію тактових імпульсів, портів вводу/виводу та джерела опорної напруги, ініціалізацію блока аналого-цифрового перетворювача, таймерів, переривань, USB-контролера, ініціалізацію змінних та зациклення програми. Опрацьовують події, що відбуваються в перериванні, згідно з наступною послідовністю: проводять перевірку ввімкнення синхронізації, якщо синхронізація не ввімкнена, то вмикаємо, проводять перевірку виконання синхронізації, якщо умова вірна, то зберігають прийнятті значення у XRAM мікроконтролера. Проводять перевірку переповнення вказівника, якщо умова вірна, то здійснюють обнулення вказівника і вихід з переривання, інакше повертаються на перевірку стану синхронізації. Згідно з формулою 1 та 2, виконують перетворення прийнятих значень у XRAM для теоретичного розрахунку положення координати х та у. Приклад конкретної реалізації способу введення графічної інформації в комп'ютер. Взято мікроконтролер SiLab C8051F340. Давач прискорення ADXL213. Алгоритм роботи контролера для одержання інформації по двох осях координат, взятих з MEMS акселерометра, полягає в наступному - під час підключення до USB шини комп'ютера відбувається ініціалізація самого контролера і периферії, якою він оснащений. На наступному етапі відбувається запуск контролера USB. За необхідності із комп'ютера надходить запит на зняття виміру. Це призводить до запуску таймера, який налаштований таким чином, що під час його переповнення відбувається запуск циклу аналого-цифрового перетворення, після завершення якого спрацьовує аналого-цифрове переривання. Переривання свідчить, що перетворення завершене. Отримане значення записується у внутрішню пам'ять контролера. Коли пам'ять повністю заповниться оцифрованими даними, тоді вони надсилаються на комп'ютер і за допомогою формул, описаних вище, можна визначити координати руху об'єкта і вивести на монітор комп'ютера. Дослідили процес написання типових символів, для отримання зображення використовували перетворення, згідно з формулою 4. Одержали експериментальні дані вимірювань параметрів типових символів та результати обчислень прискорень, що виникають при їх написанні, які приведені в таблиці 1. Символ А В С R Ж N Н 40 Параметри символів Приск. а, Довж. S·10 , м Час t, c 2 м/с 22 0,6 1,2 27 0,7 1,1 16 0,35 2,61 18 0,5 1,44 38 1,1 0,63 31 0,65 1,47 21 0,55 1,39 Середнє значення параметрів Довж. Приск. , Кут α,° Час , с Кут -3 2 10 , м м/с 49 52 51 52 24,5 0,64 1,4 48 48 50 49 -3 Результати експериментальних досліджень підтверджують підвищення інформативності введення графічної інформації в комп'ютер. Для давача прискорення із роздільністю здатністю, час дискретизації було забезпечено 50 мс, що дозволяє достатньо точно відтворювати символ, чи іншу графічну інформацію. Конструкція пристрою повинна забезпечити нахил датчика до вертикальної лінії під кутом біля 42°. Для дослідження ефективності роботи формул 1 та 2 2 UA 102637 U 5 вимірювання прискорення проводили одночасно у двох координатах, діапазон вимірювання -3 -3 прискорення ±2g, роздільна здатність 5·10 g. Час вимірювання змінювали від 0,5·10 с до -3 10·10 с. Таким чином запропонований спосіб дозволяє підвищити інформативність графічного способу представлення даних в інтерфейс комп'ютера на основі опрацювання інформації, отриманої з давачів прискорення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб введення графічної інформації в комп'ютер, що полягає в зчитуванні комп'ютером параметрів маніпулятора переміщуваного по щонайменше двох координатах та контролі контакту маніпулятора з опорною поверхнею, який відрізняється тим, що параметри руху маніпулятора отримують шляхом обробки сигналів з MEMS акселерометра, причому сигнали з нього обробляють за такою формулою: t 2 si si1 i1 t ai1 2 , a t i1 i1 i де: si - переміщення об'єкта в і-й момент часу; s i1 - переміщення об'єкта в i-1-й момент часу; i1 - швидкість об'єкта в і-й момент часу; 20 t - період часу між двома відліками датчика; a i1 - прискорення об'єкта в i-1-й момент часу; i - швидкість об'єкта в і-й момент часу. 3 UA 102637 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for input of graphical information to computer
Автори англійськоюPalamar Mykhailo Ivanovych, Palamar Yaroslav Mykhailovych, Strembitskyi Mykhailo Oleksiyovych
Назва патенту російськоюСпособ ввода графической информации в компьютер
Автори російськоюПаламар Михаил Иванович, Паламар Ярослав Михайлович, Стрембицкий Михаил Алексеевич
МПК / Мітки
МПК: G06F 3/033
Мітки: графічної, спосіб, введення, комп'ютер, інформації
Код посилання
<a href="https://ua.patents.su/6-102637-sposib-vvedennya-grafichno-informaci-v-kompyuter.html" target="_blank" rel="follow" title="База патентів України">Спосіб введення графічної інформації в комп’ютер</a>
Пристрій для введення графічної інформації в електронну обчислювальну машину
Номер патенту: 18133
Опубліковано: 16.10.2006
Автори: Васильєв Всеволод Вікторович, Фарафонова Олена Георгіївна, Сімак Лілія Олексіївна, Чьочь Артур Влоджимежович, Васильєв Олексій Всеволодович
МПК: G06K 11/00, G06K 11/06
Мітки: інформації, машину, обчислювальну, введення, графічної, пристрій, електронну
Формула / Реферат:
Пристрій для введення графічної інформації в електронну обчислювальну машину, що містить дві однакові паралельно розташовані провідні пластини (1, 2) прямокутної форми, пару провідних шин (3, 4), розташованих на протилежних краях однієї пластини, пару провідних шин (5, 6), розташованих на протилежних краях другої пластини перпендикулярно до першої пари, засіб для забезпечення електричного контакту між однаково розташованими точками провідних...
Пристрій для введення графічної інформації в електронну обчислювальну машину
Номер патенту: 28940
Опубліковано: 25.12.2007
Автори: Фарафонова Олена Георгіївна, Васильєв Всеволод Вікторович, Чьочь Артур Влоджимежович, Сімак Лілія Олексіївна, Васильєв Олексій Всеволодович
МПК: G06K 11/06, G06K 11/00
Мітки: обчислювальну, введення, пристрій, електронну, графічної, машину, інформації
Формула / Реферат:
Пристрій для введення графічної інформації в електронну обчислювальну машину, що містить провідну пластину прямокутної форми, чотири провідні шини, джерело струму, провідний щуп, з'єднаний з джерелом струму, струмові датчики Холла, виходи яких є виходами пристрою, який відрізняється тим, що провідні шини розташовані паралельно до країв провідної пластини, пристрій містить два струмових датчики Холла, джерело струму виконане у вигляді джерела...
Пристрій введення графічної інформації
Номер патенту: 17982
Опубліковано: 17.06.1997
Автори: Кожем'яко Володимир Прокопович, Білан Степан Миколайович, Чернецька Олена Васильївна, Мусаєв Ікрам Мохтарам огли
МПК: G06K 9/36, G06K 9/48, G06K 9/58
Мітки: інформації, введення, графічної, пристрій
Формула / Реферат:
1. Устройство ввода графической информации, содержащее источник излучения и рабочее поле, отличающееся тем, что в него введены счетчик координаты X, счетчик координаты Y, генератор, при этом, рабочее поле состоит из матрицы фотоприемников, оптические входы которой связаны с выходами источника излучения, однородной операционной матрицы и матрицы сканирования, выходы каждой ячейки которой связаны с первыми входами соответствующих ячеек...
Пристрій відображення графічної інформації
Номер патенту: 34245
Опубліковано: 15.02.2001
Автори: Булига Ігор Володимирович, Філинюк Микола Антонович, Мотигін Володимир В'ячеславович, Пастушенко Олександр Леонідович
МПК: G11B 7/00
Мітки: відображення, інформації, пристрій, графічної
Текст:
...кутами на дзеркало дефлектора 5, яке здійснює коливний рух в горизонтальній площині. Відбитий від дзеркала дефлектора 5 пучок здійснює складний коливний рух, попадає на об'єктив 6 і фокусується в площині рідиннокристалічного носія інформації 7. При цьому здійснюється перетворення кутового пересування паралельного пучка променів в пересування точки фокуса по площині рідиннокристалічного носія інформації 7. Ті частини рідиннокристалічного...
Світлодіодний екран для відображення графічної інформації
Номер патенту: 9307
Опубліковано: 15.09.2005
Автор: Службін Юрій Олександрович
МПК: H04N 9/00
Мітки: інформації, екран, світлодіодний, графічної, відображення
Формула / Реферат:
1. Світлодіодний екран для відображення графічної інформації, що містить матрицю світлодіодів і схему керування, який відрізняється тим, що кожний елемент світлодіодного екрана підключений до виходу відповідного йому керованого цифровим кодом широтно-імпульсного модулятора.2. Пристрій за п. 1, який відрізняється тим, що широтно-імпульсні модулятори виконані на основі мікроконтролера.3. Пристрій за пп. 1, 2, який відрізняється...
Попередній патент: Спосіб патрулювання безпілотним літальним апаратом
Наступний патент: Пристрій для загострювання олівців
Випадковий патент: Електрообігрівач настінний