Спосіб стабілізації напруги синхронного генератора в складі когенераційної установки
Номер патенту: 103717
Опубліковано: 25.12.2015
Автори: Бялобржеський Олексій Володимирович, Чередник Наталія Геннадіївна

Формула / Реферат
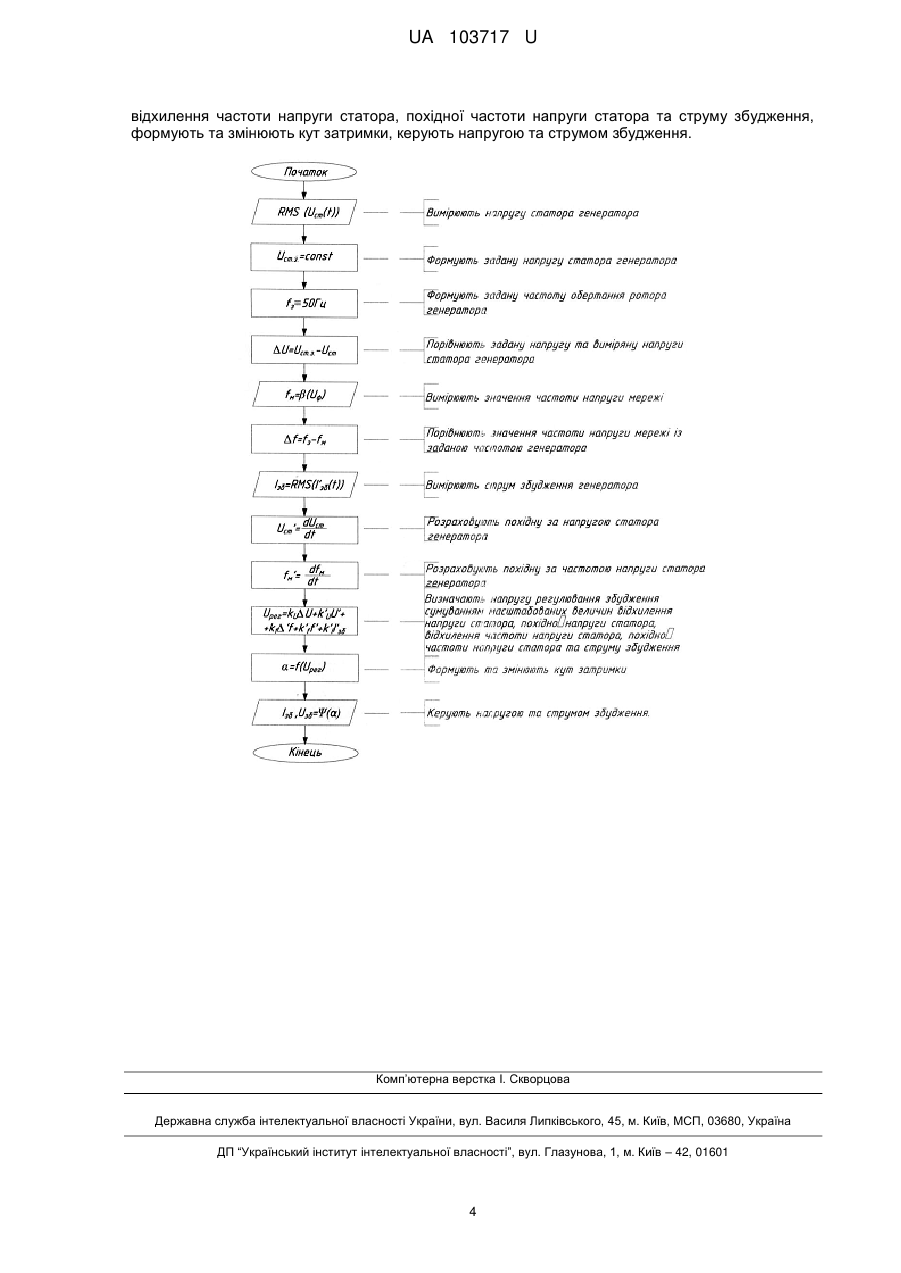
Спосіб стабілізації напруги синхронного генератора в складі когенераційної установки, що включає вимірювання напруги статора генератора, при цьому формують та змінюють кут затримки, керують напругою та струмом збудження, який відрізняється тим, що формують задану напругу статора генератора, формують задану частоту обертання ротора генератора, порівнюють задану напругу та виміряну напругу статора генератора, вимірюють значення частоти напруги мережі, порівнюють із заданою частотою генератора, вимірюють струм збудження генератора, розраховують похідну за напругою статора генератора, розраховують похідну за частотою напруги статора генератора, визначають напругу регулювання збудження підсумуванням масштабованих величин відхилення напруги статора, похідної напруги статора, відхилення частоти напруги статора, похідної частоти напруги статора та струму збудження, формують та змінюють кут затримки, керують напругою та струмом збудження.
Текст
Реферат: Спосіб стабілізації напруги синхронного генератора в складі когенераційної установки включає вимірювання напруги статора генератора, при цьому формують та змінюють кут затримки, керують напругою та струмом збудження. Формують задану напругу статора генератора, формують задану частоту обертання ротора генератора, порівнюють задану напругу та виміряну напругу статора генератора, вимірюють значення частоти напруги мережі, порівнюють із заданою частотою генератора, вимірюють струм збудження генератора, розраховують похідну за напругою статора генератора, розраховують похідну за частотою напруги статора генератора, визначають напругу регулювання збудження підсумуванням масштабованих величин відхилення напруги статора, похідної напруги статора, відхилення частоти напруги статора, похідної частоти напруги статора та струму збудження, формують та змінюють кут затримки, керують напругою та струмом збудження. UA 103717 U (54) СПОСІБ СТАБІЛІЗАЦІЇ НАПРУГИ СИНХРОННОГО ГЕНЕРАТОРА В СКЛАДІ КОГЕНЕРАЦІЙНОЇ УСТАНОВКИ UA 103717 U UA 103717 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки і може бути використана при розробці автоматичного регулятора збудження систем стабілізації напруги синхронних генераторів. Відоме технічне рішення (Спосіб регулювання напруги синхронного генератора, патент UA 38469, H03L 5/00, 15.05.2001, бюл. № 4, Зонтов P.M., Алаєв В.В., Шоцький О.М.), в якому регулювання напруги синхронного генератора шляхом подачі, регульованої напруги на обмотку збудження, додатково вимірюється тимчасовий інтервал кожного такту пульсацій миттєвої, випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою, і по цьому часовому інтервалі на обмотку збудження подаються імпульси напруги живлення. Спільними ознаками відомого технічного рішення із корисною моделлю, що заявляється, є: вимірювання напруги статора генератора, керування напруги та струму збудження. Недоліками відомого технічного рішення є: відсутність контролю струму збудження, що знижує швидкість зміни струму збудження; відсутність контролю струму статора, що виключає визначення активної та реактивної потужності; відсутність контролю частоти, що може призвести до втрати стійкості. Відоме технічне рішення (Спосіб регулювання напруги синхронного генератора з високочастотним збудником, патент ЕР 1976092 А1, H03L5/00, 15.04.2004, бюл. № 4, Шайтор М.М., Березовенко О.В.) реалізація запропонованого способу регулювання напруги синхронного генератора здійснюється трьома операціями: виміром часового інтервалу кожного такту пульсацій випрямленої напруги синхронного генератора, перетворенням тимчасового інтервалу у величину, зворотну величині кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження і зміною кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження, що дає зменшення перервності напруги збудження і відповідно зменшення спотворення синусоїди фазової напруги генератора. Спільними ознаками відомого технічного рішення із корисною моделлю, що заявляється, є вимірювання напруги статора генератора, керування напруги та струму збудження, формування та зміна кута затримки. Недоліками відомого технічного рішення є: відсутність контролю струму збудження, що знижує швидкість зміни струму збудження; відсутність контролю струму статора, що виключає визначення активної та реактивної потужності; відсутність контролю частоти, що може призвести до втрати стійкості. Найбільш близьким до корисної моделі, що заявляється, є технічне рішення (Спосіб регулювання напруги синхронного генератора, UA патент 64495, H03L 5/00, 16.02.2004, Бюл. № 2, 2004 р. Алаєв В.В., Шоцький О.М.), що забезпечує розподіл реактивної потужності без зрівняльних зв'язків між синхронним генератором, шляхом виміру cos синхронного генератора і коректування максимального значення напруги живлення обмотки збудження по величині cos на заздалегідь розраховану величину, якщо cos синхронного генератора більше специфікаційного значення для електроенергетичної системи, то максимальне значення напруги живлення обмотки збудження збільшують, якщо cos синхронного генератора менше специфікаційного значення, то максимальне значення напруги живлення обмотки збудження зменшують. Спільними ознаками даного технічного рішення та пропонованої корисної моделі є: вимірювання напруги статора генератора, керування напруги та струму збудження, формування та зміна кута затримки. Недолік даного технічного рішення полягає у відсутності контролю струму збудження, що знижує швидкість зміни струму збудження; відсутності контролю частоти, що може призвести до втрати стійкості. Дане технічне рішення вибрано як прототип корисної моделі, що заявляється. В основу корисної моделі поставлена задача стабілізації напруги шляхом реалізації алгоритму пропорційно-диференціального автоматичного регулювання реактивної потужності, забезпечити статичну та динамічну стійкість паралельної роботи когенераційної установки з мережею. Поставлена задача вирішується тим, що у відомому технічному рішенні вимірюють напругу статора генератора, формують та змінюють кут затримки, керують напругою та струмом збудження, згідно з корисною моделлю, формують задану напругу статора генератора, формують задану частоту обертання ротора генератора, порівнюють задану напругу та виміряну напругу статора генератора, вимірюють значення частоти напруги мережі, порівнюють із заданою частотою генератора, вимірюють струм збудження генератора, розраховують похідну за напругою статора генератора, розраховують похідну за частотою напруги статора генератора, визначають напругу регулювання збудження підсумуванням масштабованих величин відхилення напруги статора, похідної напруги статора, відхилення частоти напруги 1 UA 103717 U статора, похідної частоти напруги статора та струму збудження, формують та змінюють кут затримки, керують напругою та струмом збудження. Запропонована корисна модель пояснюється кресленням, де наведено Алгоритм реалізації способу. 5 Струм збудження генератора визначає його ЕРС E q . Напруга Ur і напруга лінії Uл , пов'язані між собою відношеннями: Eg (UГ Ip Xd )2 (Ia Xd ) 2 2 , (1) 2 UГ (ГМ Ip XT ) (Ia XT ) 10 (2). При відсутності автоматичного регулювання збудження ЕРС Egconst . Реактивна потужність генератора 2 UМ Xd XМ Xd XM , (3) XТ ХЛ ; (Еq, UM ) . QГ QE q EqUМ cos де XM Активна потужність електропередачі визначається: PГ РEq 15 EqUM Xd XM sin . (4) Найбільша передана активна потужність досягається при куті / 2 . При цьому в міру зростання активної потужності перехідна ЕРС Е' і напруга UГ генератора знижуються. Активній потужності відповідає певна реактивна потужність. Виключаючи з рівнянь (3) і (4) при допущенні QГ QЛ напругу UM , можна отримати залежність QГ f (PГ ) для неявно полюсного генератора. Зокрема, для кута / 2 така залежність являє собою рівняння кола 2 (QГ UГ 20 X d XM 2 2 2 Х XM 2 ) PГ (UГ d ) 2 X d XM 2 X d XM , (5) 2 з центром, розташованим на осі реактивної потужності QГ UГ ( Хd XM ) / 2Xd XM і радіусом 2 r UГ ( Хd XM ) / 2Xd XM . Точки перерізу кола з віссю Q відповідають найбільшим при PГ 0 2 2 генерованій Qr max UГ / ХM i споживаній QГ max UГ / Хd реактивним потужностям. При автоматичному регулюванні збудження активна потужність, що віддається генератором, 25 найбільша за умовою стійкості - зростає, внаслідок збільшення ЕРС E q . При автоматичному регулюванні, що забезпечує незмінність потокозчеплення обмотки збудження, вважається незмінною перехідна ЕРС генератора E ` - const. Активна потужність при цьому дорівнює PE` 30 2 Uc ( Xd X` ) sin 2 E`UM sin d ( X`d XM ) 2( Xd XM )( X` XM ) . (6) d Найбільша передана потужність визначається динамічною характеристикою, досягається при кутах / 2 і перевищує найбільшу потужність при відсутності регулювання збудження. При цьому залежність реактивної потужності від активної неявнополюсного генератора при граничному куті ` (E`, UM ) / 2 . При автоматичній зміні струму збудження, при якому підтримується незмінною напруга 35 генератора UГ const . При такому автоматичному регулюванні активна потужність визначається виразом PUГ 2 UM Xd UГUM sin sin 2 XM 2XM ( Xd XM ) . (7) Найбільша передана активна потужність досягає (150-180)% найбільшої потужності і настає 40 при Г (UГ , UM ) / 2 . Керування режимом генератора призначене не тільки для підтримання напруги на заданому рівні та генерованої або споживаної синхронним генератором реактивної потужності, а й для 2 UA 103717 U підвищення до максимально можливих рівнів статичної та динамічної стійкості вузла електричної мережі підприємства в цілому. Регулювальний вплив на керування режимом генератора зумовлюється поточними параметрами режиму вузла, до якого він підключений: струму навантаження Iсп , струму 5 генератора Іген та напруги мережі Uc . Відповідно до керування режимом генератора формування впливу за основним параметром, від якого залежить статична, динамічна і E результуюча стійкість електропередачі - по куту зсуву фаз між ЕРС q генератора і напругою Uc шин мережі. Додатково керування режимом генератора за вказаними параметрами режиму визначає: 10 відхилення амплітуди або діючого значення напруги Uг від заданого значення Uг.пр похідна напруги ` Uг dUг / dt 2 ; зміна `f d / dt і перша похідна f ` df / dt ~ d / dt частоти f і похідна струму збудження генератора I`зб dIзб / dt Відхилення напруги 15 25 30 . необхідно для забезпечення практично постійної (з точністю статичної похибки регулювання) напруги Uг при змінах струму навантаження генератора або напруги на початку лінії електропередачі Uc Uг jIг Xг const 20 Uг , (8), формованого на виході регулятора моделюванням падіння напруги jIг Xг . Використання сигналу по похідній регульованої величини напруги Uг представляє другий спосіб забезпечення стійкості функціонування замкнутої автоматичної системи регулювання: перший спосіб введення місцевого гнучкого негативного зворотного зв'язку, тобто стабілізації. Сигнал по похідній напруги стабілізує автоматичну систему регулювання збудження насамперед при холостому ході генератора. Сигнали, що відображають зміну і похідну частоти сумісно з сигналами по похідних напруги і струму збудження, тобто електрорушійної сили генератора, підвищують стійкість замкнутої автоматичної системи регулювання, що включає навантажену мережу електропередачі, забезпечуючи загасання електромеханічних перехідних процесів, - підвищуючи статичну і динамічну стійкість паралельної роботи декількох електричних машин. Таким чином, алгоритм автоматичного регулювання збудження дії представляється у вигляді: ` Uрег k u U k uU`k f `f k`f f `k`1I` з , (9) або в операторній формі у вигляді pk f ` Uрег (р) (k U pku )U(p) pk ` f (p) pkI`Iзб (р) f pTд.р. 1 , (10) fг f 35 f f f f k` , k , k` , k` c г; U f f I де - відхилення частоти напруги генератора від синхронної c ; - коефіцієнти з розмірністю постійної часу. В результаті сигнал регулювання напруги подається на збудження, де формується заданий струм збудження, який подається на (обмотку збудження) генератор. Таким чином, вказані процеси реалізують регулювання збудження генератора, що призводить до підвищення якості та стабілізації електричної напруги синхронного генератора у складі когенераційної установки. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Спосіб стабілізації напруги синхронного генератора в складі когенераційної установки, що включає вимірювання напруги статора генератора, при цьому формують та змінюють кут затримки, керують напругою та струмом збудження, який відрізняється тим, що формують задану напругу статора генератора, формують задану частоту обертання ротора генератора, порівнюють задану напругу та виміряну напругу статора генератора, вимірюють значення частоти напруги мережі, порівнюють із заданою частотою генератора, вимірюють струм збудження генератора, розраховують похідну за напругою статора генератора, розраховують похідну за частотою напруги статора генератора, визначають напругу регулювання збудження підсумуванням масштабованих величин відхилення напруги статора, похідної напруги статора, 3 UA 103717 U відхилення частоти напруги статора, похідної частоти напруги статора та струму збудження, формують та змінюють кут затримки, керують напругою та струмом збудження. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюBialobrezhskyi Oleksii Volodymyrovych
Автори російськоюБялобржеский Алексей Владимирович
МПК / Мітки
МПК: H03L 5/00
Мітки: складі, спосіб, когенераційної, напруги, синхронного, генератора, установки, стабілізації
Код посилання
<a href="https://ua.patents.su/6-103717-sposib-stabilizaci-naprugi-sinkhronnogo-generatora-v-skladi-kogeneracijjno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації напруги синхронного генератора в складі когенераційної установки</a>
Спосіб регулювання напруги синхронного генератора з високочастотним збудником
Номер патенту: 65910
Опубліковано: 15.04.2004
Автори: Шайтор Микола Михайлович, Березовенко Олександр Валентинович
МПК: H03L 5/00
Мітки: регулювання, синхронного, високочастотним, збудником, спосіб, напруги, генератора
Формула / Реферат:
Спосіб регулювання напруги синхронного генератора з високочастотним збудником, що включає вимір часового інтервалу кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою, який відрізняється тим, що перетворюють часовий інтервал у величину, зворотну величині кута затримки по відношенню до початку кожного напівперіоду випрямленої напруги збудження, частота якої у декілька разів...
Спосіб параметричної стабілізації напруги синхронного генератора
Номер патенту: 64442
Опубліковано: 16.02.2004
Автори: Шоцький Олександр Миколайович, Олєйников Олександр Михайлович
МПК: H03L 5/00
Мітки: спосіб, генератора, стабілізації, напруги, синхронного, параметричної
Формула / Реферат:
Спосіб параметричної стабілізації напруги синхронного генератора, що включає випрямлення трифазної напруги синхронного генератора, вимір тимчасових інтервалів кожного такту пульсацій миттєвої випрямленої напруги синхронного генератора по лінії порівняння з заданою опорною напругою і подачу імпульсів напруги на обмотку збудження шириною, обумовленою перетинанням кожного піка пульсацій з лінією опорної напруги, який відрізняється тим, що...
Спосіб регулювання напруги синхронного генератора
Номер патенту: 38469
Опубліковано: 15.05.2001
Автори: Алаєв Віктор Васильович, Зонтов Роман Миколайович, Шоцький Олександр Миколайович
МПК: H03L 5/00
Мітки: напруги, генератора, регулювання, спосіб, синхронного
Текст:
...при значному зменшенні напруга СГ від номінального значення напруга живлення постійно підключена до обмотки збудження, струм збудження зростає, напруга СГ відновлюється. Навпаки, при значному збільшенні напруги СГ від номінального значення напруга живлення відключена від обмотки збудження, струм збудження зменшується, напруга СТ відновлюється. Реальними параметрами способу є: 1. Кількість тактів випрямлення напруги СГ і, отже, частота подачі...
Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його напруги збудження
Номер патенту: 56989
Опубліковано: 10.02.2011
Автори: Білоконь Олександра Леонідівна, Рябенький Володимир Михайлович, Ушкаренко Олександр Олегович
МПК: H02M 1/08
Мітки: генератора, реактивної, корегування, слідкуючого, потужності, напруги, синхронного, спосіб, збудження, шляхом, стабілізації
Формула / Реферат:
Спосіб стабілізації реактивної потужності синхронного генератора шляхом слідкуючого корегування його струму збудження, в якому перетворюють вихідну напругу генератора Uвих в аналоговий сигнал Uвих за допомогою функціональної структури Uвих, Uвих для подальшого порівняння його з опорною напругою Ucosφ і...
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги
Номер патенту: 53711
Опубліковано: 11.10.2010
Автори: Ушкаренко Олександр Олегович, Рябенький Володимир Михайлович, Білоконь Олександра Леонідівна, Нікішина Маргарита Володимирівна
МПК: H02M 1/08
Мітки: генератора, вихідної, частоти, керування, спосіб, зміни, напруги, синхронного, збудженням
Формула / Реферат:
Спосіб керування збудженням синхронного генератора при зміні частоти вихідної напруги, в якому перетворюють вихідну напругу генератора в аналоговий сигнал за допомогою функціональної структури для подальшого перетворення і наступного...
Попередній патент: Спосіб реалізації динамічних режимів тягового електротехнічного комплексу постійного струму з конденсаторним накопичувачем
Наступний патент: Дитячий манеж
Випадковий патент: Гаситель енергії води