Спосіб керування параметрами систем радіоакустичного зондування атмосфери
Номер патенту: 105311
Опубліковано: 25.04.2014
Автори: Куля Дмитро Миколайович, Карташов Володимир Михайлович, Кушнір Маргарита Володимирівна
Формула / Реферат
Спосіб керування параметрами систем радіоакустичного зондування атмосфери, який полягає в тому, що в атмосферу випромінюють акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвічі більшою, ніж довжина хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, які розсіяні на акустичному імпульсі, з відбитого радіосигналу обчислюють невідомі параметри атмосфери уздовж всієї траси зондування, обчислюють екстрапольоване значення швидкості звуку, методом передбачення, що відповідає значенню швидкості звуку в наступній точці, і оптимальну оцінку швидкості звуку на тому же рівні, обчислюють необхідне значення частоти генератора сигналів високої частоти для керування частотою передавальної антени, забезпечують збереження умови Брегга уздовж всієї траси зондування, який відрізняється тим, що проводять екстраполяцію значення параметра розстроювання умови Брегга, методом передбачення, звідки отримують значення швидкості звуку в точці вимірювання.
Текст
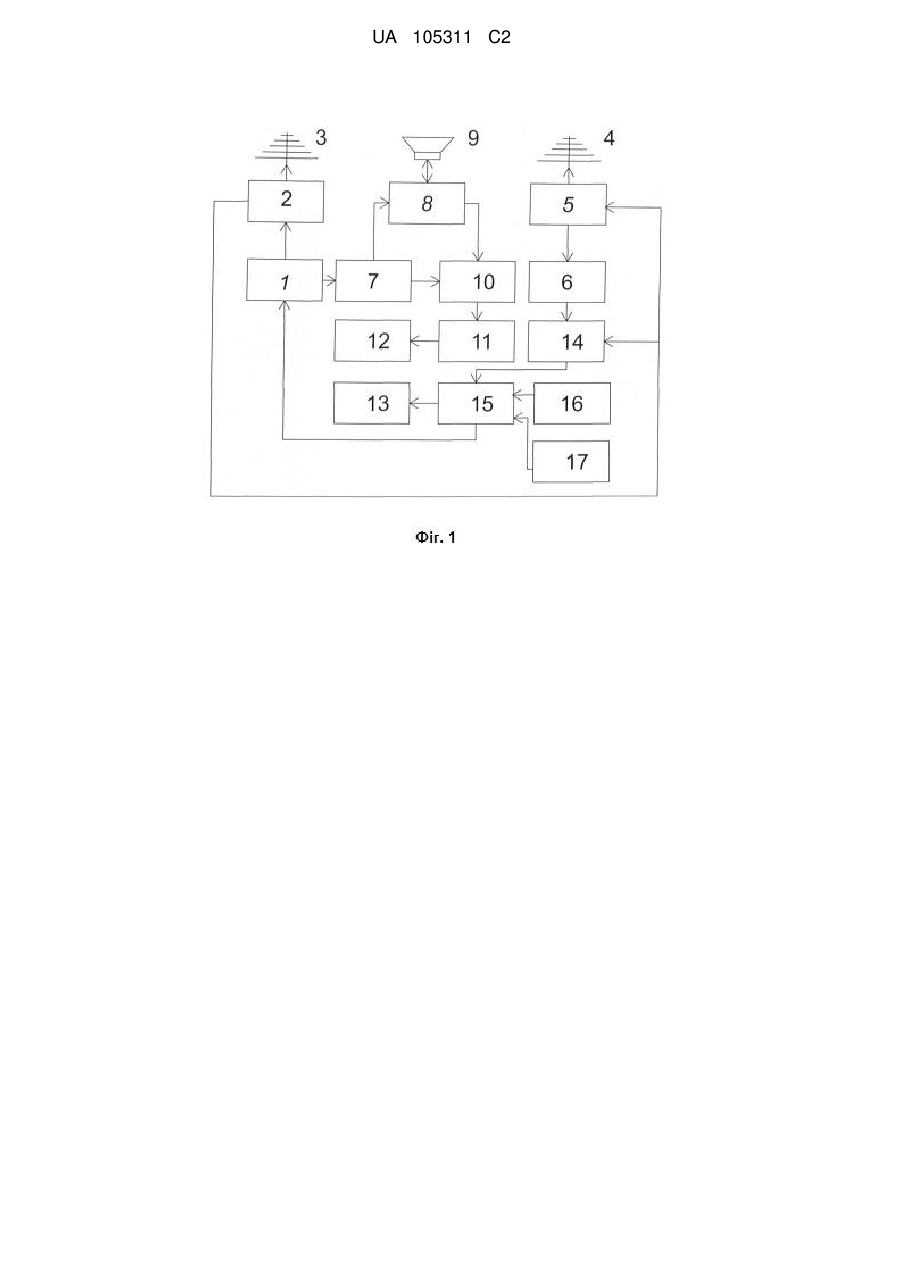
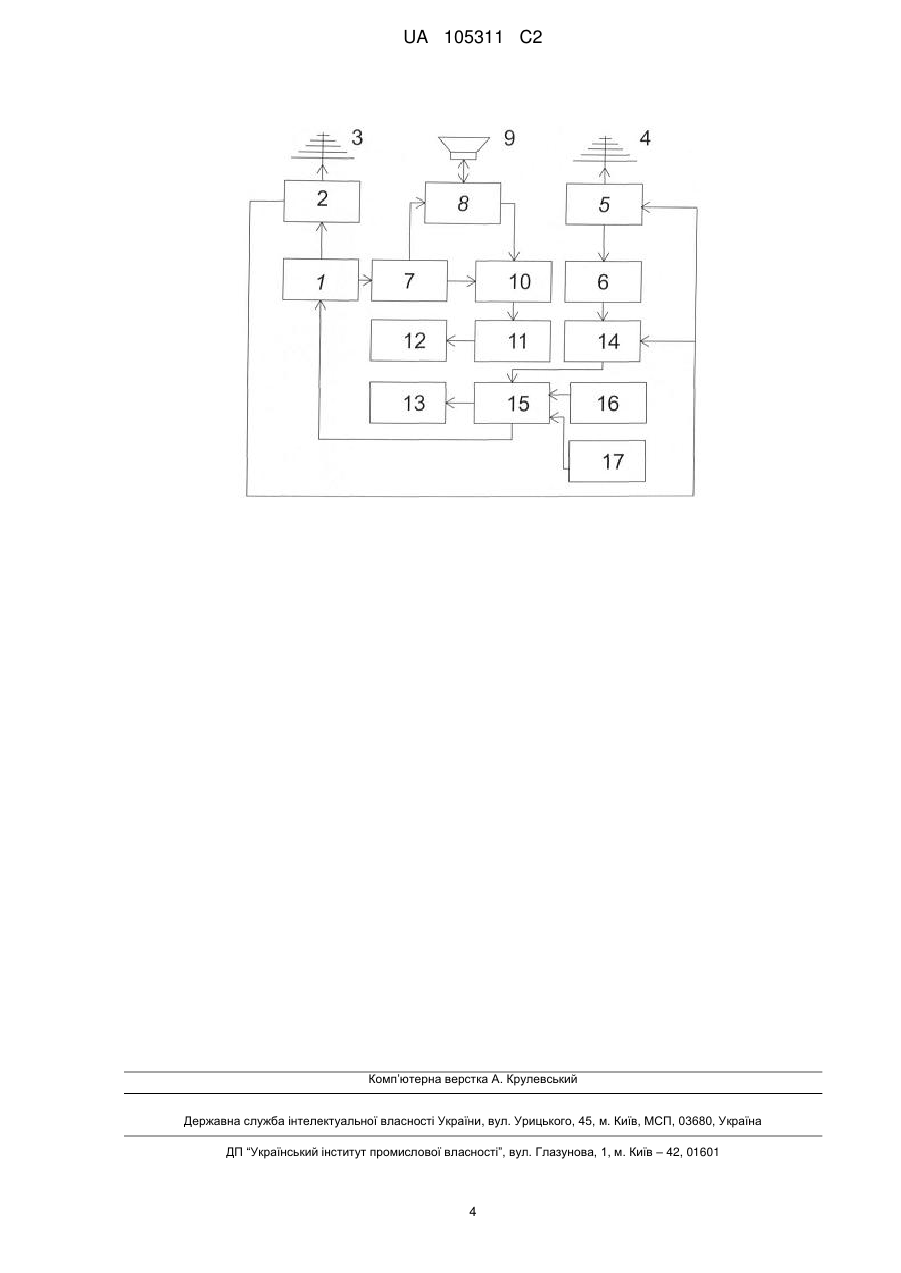
Реферат: Спосіб керування параметрами систем радіоакустичного зондування атмосфери належить до радіотехніки та радіолокаційної метрології, а саме до радіоакустичних способів виміру параметрів атмосфери, і може бути використаний при складанні короткострокових прогнозів погоди, при метеорологічному забезпеченні екологічного моніторингу атмосфери й безпеки зльоту й посадки літальних апаратів різного призначення. Спосіб керування полягає у тому, що в атмосферу випромінюють акустичний імпульс із синусоїдальним заповненням. Опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвічі більшою, ніж довжина хвилі синусоїдального заповнення акустичного імпульсу. Приймають електромагнітні коливання, які розсіяні на акустичному імпульсі. З відбитого радіосигналу обчислюють невідомі параметри атмосфери уздовж всієї траси зондування. Обчислюють екстрапольоване значення швидкості звуку, методом передбачення, що відповідає значенню швидкості звуку в наступній точці, і оптимальну оцінку швидкості звуку на тому ж рівні. Обчислюють необхідне значення частоти генератора сигналів високої частоти для керування частотою передавальної антени. Забезпечують збереження умови Брегга уздовж всієї траси зондування. Проводять екстраполяцію значення параметра розстроювання умови Брегга, методом передбачення, звідки отримують значення швидкості звуку в точці вимірювання. Технічним результатом є підвищення ефективності роботи за рахунок збільшення точності оцінки параметрів атмосфери, суттєво підвищити ефективність частотної адаптації, а також якість отримуваних оцінок шуканих метеопараметрів. UA 105311 C2 (12) UA 105311 C2 UA 105311 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до радіолокаційної метрології, а саме до радіоакустичних способів виміру параметрів атмосфери, і може бути використаний при складанні короткострокових прогнозів погоди, при метеорологічному забезпеченні екологічного моніторингу атмосфери й безпеки зльоту й посадки літальних апаратів різного призначення. У цей час у системах РАЗ реалізовані алгоритми обробки сигналів, запозичені з радіолокації, які засновані на виділенні й вимірі доплерівської частоти коливань. Так спосіб, що використовується в радіоакустичному пристрої (а.с. СССР № 1092440, МКИ G01S 13/95, опубл. 15.01.84 Бюл. № 8), полягає в наступному. Пакет звукових коливань, сформований генератором сигналів звукової частоти, проходить через антенний перемикач і випромінюється акустичною антеною в атмосферу. Високочастотний сигнал, сформований генератором сигналів високої частоти, випромінюється передавальною антеною, відбивається від пакета звукових хвиль, що переміщається, і приймається приймальною антеною в радіоприймач, на виході якого в блоці виміру доплерівської частоти радіосигналу відбувається вимір доплерівського зсуву частоти. Отримане значення доплерівського зсуву високої частоти надходить у блок обчислення абсолютної температури в зондуючому об'ємі атмосфери. Крім того, акустичний сигнал, відбитий від атмосфери, проходить через акустичну антену й антенний перемикач, надходить у блок обробки сигналів, де відбувається посилення й фільтрація сигналу. Потім відбувається обчислення радіальної складової швидкості, що враховується при обчисленні абсолютної температури й керуванні частотою генератора сигналів високої частоти. Недоліком даного способу є низька точність вимірів, низький рівень відбитого радіосигналу, можливий зрив слідкування, внаслідок недостатньо точного підстроювання частот. За прототип узятий спосіб, що використовується в приладі радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря (а.с. СССР № 1455887, МКИ G01S 13/95), який враховує зберігання умови Брегга. Для чого передбачається наявність двох блоків обчислення швидкості звуку. У першому блоці, за обмірюваним значенням доплерівського зсуву частоти випромінюваного сигналу і її миттєвому значенню, обчислюється поточне значення швидкості звуку. У другому блоці обчислення швидкості звуку виконується обчислення екстрапольованого значення швидкості звуку й оптимальна оцінка швидкості звуку на поточному рівні. Величина оптимального оцінного значення швидкості звуку на поточному рівні передається на вхід блока розрахунку температури. З метою виключення погрішності з результатів обчислення температури, викликаної радіальним вітром, на інший вхід цього блока подається значення радіальної швидкостівітру. У блоці обчислення температури на кожному висотному рівні обчислюється температура в зондуючому об'ємі атмосфери. З виходу другого блока обчислення швидкості звуку екстрапольоване оптимальне оціночне значення швидкості звуку на наступному рівні, що відповідає значенню швидкості звуку в попередній точці, передається в блок управління частотою, де обчислюється необхідне значення частоти генератора сигналів високої частоти. При такому способі управління частотою генератора забезпечується зберігання умови Брегга уздовж всієї траси зондування. Датчик температури й датчик вологості необхідні для обчислення швидкості звуку на рівні землі. Недоліком даного способу є також низька точність вимірів, через наявність значних по величині систематичних погрішностей обчислення значень швидкості звуку, одержуваних за результатами вимірів доплерівської частоти радіосигналу. Цей спосіб будується на припущенні, що форма сигналу при відбитті від акустичного хвильового пакета не змінюється, а змінюються лише значення параметрів відбитих сигналів, у які закладається корисна інформація про інформативні параметри атмосфери. Однак у радіоакустичному локаційному каналі при відбитті радіохвилі від акустичного хвильового пакета спостерігається зміна форми випромінюваних коливань, значно змінюється як фазова структура коливання, так і форма обвідної радіосигналу. Технічною задачею винаходу є підвищення точності оцінок швидкості звуку, одержуваних у системах РАЗ, за рахунок розробки способу управління параметрами радіосигналу з урахуванням структурних особливостей сигналу, розсіяного на звуковій посилці. Ця задача вирішена в наступним чином. У способі радіоакустичного зондування, що полягає в тому, що в атмосферу випромінюють акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвічі більшою, ніж довжина хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні на акустичному імпульсі, з відбитого радіосигналу обчислюють невідомі параметри атмосфери уздовж всієї траси зондування, обчислюють екстрапольоване значення швидкості звуку, методом передбачення, що відповідає значенню швидкості звуку в наступній точці, і оптимальну оцінку швидкості звуку на тому же рівні, обчислюють необхідне значення частоти генератора сигналів високої частоти для управління 1 UA 105311 C2 5 10 15 20 25 30 35 частотою передавальної антени, забезпечують збереження умови Брегга уздовж всієї траси зондування, який відрізняється тим, що проводять екстраполяцію значення параметра розстроювання умови Брегга, методом передбачення, звідки отримують значення швидкості звуку в точці вимірювання. На кресленні зображена блок-схема пристрою обробки радіосигналу, що реалізує запропонований спосіб. Схема пристрою, який реалізує даний спосіб (кресл.) складається з блока 1 управління частотою, вихід якого з'єднаний зі входом генератора 2 сигналів високої частоти, перший вихід якого з'єднаний з передавальною антеною 3, а другий - зі входом радіоприймачем 5, вихід якого з'єднаний з приймальною радіоантеною 4, а другий - зі входом блока 6 обчислення параметра q, вихід якого з'єднаний зі входом першого блока обчислення швидкості звуку 14, вихід якого з'єднаний зі входом другого блока обчислення швидкості звуку 15, входи якого з'єднані з датчиком температури 16 і датчиком вологості 17, а виходи: один з блоком управління частотою 1, а другий - з блоком обчислення температури 13; другий вихід блока управління частотою 1 підключений до генератора звукових частот 7, вихід якого з'єднаний зі входом перемикача 8 і акустичного приймача 10, вхід-вихід перемикача 8 з'єднаний з акустичної приймальнопередавальна антенна 9, а другий вихід - акустичний приймач 10, вихід якого підключений до входу блока доплерівської частоти акустичного сигналу 11, вихід якого з'єднаний зі входом блока 12 обчислення радіальної швидкості вітру. Розглянемо докладніше пропонований спосіб. Пакет звукових коливань, сформований генератором сигналів звукової частоти 7, проходить через антенний перемикач 8 і випромінюється акустичною антеною 9 в атмосферу. Генератором 2 сигналів високої частоти формується високочастотний сигнал і випромінюється передавальною антеною 3, відбивається від пакета звукових хвиль, що переміщається, і приймається приймальною антеною 4 в радіоприймач 5, далі у блоці 6 обчислюється параметр q . При певній швидкості звуку буде формуватися відповідна структура відбитого радіосигналу, тобто, форма відбитого радіосигналу від акустичної посилки визначається швидкістю звуку в атмосфері. Шляхом порівняння форми прийнятого радіосигналу з формами радіосигналів, властивими для різної швидкості звуку, можна робити оцінку швидкості звуку. Таке порівняння можна зробити, скориставшись багатоканальною схемою пристрою оцінювання параметра розстроювання умови Брегга, до складу якої входять n узгоджених фільтрів, настроєних на сигнал Fr, qn , n 1, n , та детектор обвідної. Імпульсні характеристики узгоджених фільтрів є дзеркальним відображенням очікуваних сигналів. Форма обвідної сигналів визначається згідно з функцією розсіювання. У такому випадку стає можливим усунення систематичної погрішності в оцінках швидкості звуку, властивим алгоритмам обробки сигналів, заснованих на вимірі доплерівської частоти коливань. Форма електромагнітного сигналу розсіяного на акустичній хвильовій посилці визначається й описується спільною функцією розсіювання (1) звукового й радіосигналу Fr, q * jqr' E2r '-r S r ' e dr ' , (1) 40 45 50 де q 2k e k s - параметр розстроювання умови Брегга; k s 2fa / c a - хвильове число для звуку; k e 2f / c - хвильове число електромагнітного сигналу; r - зсув сигналів по координаті "дальність"; E2r '-r - комплексна просторова обвідна радіосигналу; Sr ' - комплексна просторова обвідна акустичного сигналу. При різних фіксованих значеннях параметра q форма функції Fr, q різна й відповідає формі розсіяного в атмосфері радіосигналу при швидкості звуку, визначається по формулі: 2fs , (2) cS 4fe / c q де fs - частота звуку; fe - частота радіосигналу; c - швидкість поширення радіохвиль. Таким чином, функція розсіювання (1) дозволяє визначити форму, що буде мати розсіяний в атмосфері радіосигнал при різних швидкостях звуку. А інформація про значення параметра розстроювання умови Брегга дозволяє визначати значення швидкості звуку. Оцінка швидкості звуку в такому випадку стає можливою, тому що для всіх узгоджуючих фільтрів відомі значення параметра q , при яких був оцінений сигнал, де параметр q однозначно функціонально зв'язаний зі швидкістю звуку виразом (2). Обчислене поточне значення швидкості звуку у першому блоці виміру швидкості звуку 14 подається у другий блок обчислення швидкості звуку 15. 2 UA 105311 C2 У другому блоці обчислення швидкості звуку 15 виконується обчислення екстрапольованого оціночного значення швидкості звуку за формулою C aiå 2C ai1 C ai 2 , (3) 5 де i - номер висотного рівня; C ai1 - оптимальне оціночне значення швидкості звука на наступному рівні. У цьому же блоці обчислюється оптимальна оцінка швидкості звуку на тому же рівні по формулі C i C i 1 1 Cia 2 aåi 2 ani / 2 i 2 i , (4) n Ca e Ca n Ca e Ca 2 i - дисперсія екстрапольованого значення; де e Ca 10 15 20 25 30 2 n - дисперсія виміряного значення швидкості звуку. C i a Значення C ia передається на другий вхід блока 13 обчислення температури, на перший вхід цього блока подається значення радіальної швидкості вітру зі входу блока 12 обчислення радіальної швидкості вітру. У блоці 13 обчислюється значення температури на кожному висотному рівні. i Екстрапольоване значення Cae 1 передається у блок управління частотою 1, де обчислюється необхідне значення частоти генератора 2 сигналів високої частоти з урахуванням наступного значення, для підстроювання частоти радіопередавача. 2fs Ce i1 q C ae , при q 0 . (5) Fe 4 Блок 6 обчислення значення параметра q складається з N каналів, кожний з яких має согласуючих фільтр і детектор обвідної. Далі стоїть вирішальний пристрій, що визначає канал з найбільшим з отриманих після фільтрації значенням сигналу. За рахунок цього приймається рішення про величину параметра q , яким характеризується сигнал, що найбільше близько збігся за формою із прийнятим сигналом. Оцінивши q , визначається швидкість звуку за формулою (2). Таким чином, у порівнянні з алгоритмами обробки сигналів, заснованих на вимірі доплерівської частоти коливань, запропонована схема обробки сигналів ураховує особливості відбиття радіосигналу від акустичної посилки. Це досягається за рахунок включення до схеми погоджуючих фільтрів, настроєних на сигнал з певним значенням q , що підвищує якість оцінок швидкості звуку, при використанні такої схеми в системах РАЗ атмосфери. Використання винаходу дозволить підвищити ефективність роботи існуючих систем РАЗ за рахунок збільшення точності оцінки параметрів атмосфери, суттєво підвищити ефективність частотної адаптації систем РАЗ, а також якість отримуваних оцінок шуканих метеопараметрів. ФОРМУЛА ВИНАХОДУ 35 40 45 Спосіб керування параметрами систем радіоакустичного зондування атмосфери, який полягає в тому, що в атмосферу випромінюють акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвічі більшою, ніж довжина хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, які розсіяні на акустичному імпульсі, з відбитого радіосигналу обчислюють невідомі параметри атмосфери уздовж всієї траси зондування, обчислюють екстрапольоване значення швидкості звуку, методом передбачення, що відповідає значенню швидкості звуку в наступній точці, і оптимальну оцінку швидкості звуку на тому ж рівні, обчислюють необхідне значення частоти генератора сигналів високої частоти для керування частотою передавальної антени, забезпечують збереження умови Брегга уздовж всієї траси зондування, який відрізняється тим, що проводять екстраполяцію значення параметра розстроювання умови Брегга, методом передбачення, звідки отримують значення швидкості звуку в точці вимірювання. 3 UA 105311 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюKartashov Volodymyr Mykhailovych
Автори російськоюКарташов Владимир Михайлович
МПК / Мітки
МПК: G01S 13/95
Мітки: атмосфери, параметрами, керування, радіоакустичного, зондування, спосіб, систем
Код посилання
<a href="https://ua.patents.su/6-105311-sposib-keruvannya-parametrami-sistem-radioakustichnogo-zonduvannya-atmosferi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування параметрами систем радіоакустичного зондування атмосфери</a>
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури
Номер патенту: 105052
Опубліковано: 10.04.2014
Автори: Бабкін Станіслав Іванович, Куля Дмитро Миколайович, Карташов Володимир Михайлович
МПК: G01S 13/95
Мітки: вертикального, профілю, радіоакустичного, спосіб, температури, зондування, реєстрації, атмосфери
Формула / Реферат:
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вихідний сигнал...
Спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря
Номер патенту: 89344
Опубліковано: 11.01.2010
Автори: Яценко Павло Олексійович, Волох Андрій Вікторович, Семеняка Андрій Вікторович, Карташов Володимир Михайлович, Бабкін Станіслав Іванович, Пащенко Сергій Васильович
МПК: G01S 13/95
Мітки: вертикального, радіоакустичного, профілю, повітря, дистанційно, атмосфери, температури, реєстрації, спосіб, зондування
Формула / Реферат:
Спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом,...
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури

Номер патенту: 97612
Опубліковано: 27.02.2012
Автори: Бабкін Станіслав Іванович, Карташов Володимир Михайлович, Пащенко Сергій Васильович, Куля Дмитро Миколайович
МПК: G01S 13/95
Мітки: атмосфери, спосіб, реєстрації, вертикального, радіоакустичного, температури, зондування, профілю
Формула / Реферат:
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, послідовно перемножують...
Пристрій для радіоакустичного зондування атмосфери
Номер патенту: 46150
Опубліковано: 15.05.2002
Автори: Ульянов Юрій Миколайович, Бутакова Світлана Вікторівна, Бусловський Сергій Федорович, Бєдін Віктор Савович
МПК: G01S 13/95
Мітки: пристрій, зондування, радіоакустичного, атмосфери
Формула / Реферат:
Пристрій для радіоакустичного зондування атмосфери, що містить комбіновану радіоакустичну антенну систему, розташовану на поверхні Землі, акустичний передавач і доплерівський радіолокатор, який містить антенний комутатор, імпульсний радіопередавач, радіоприймач, блок обробки інформації, до якого підключено індикатор метеовеличин, який відрізняється тим, що антенна система виконана у вигляді кільцевої антенної решітки з числом елементів,...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/00, G01S 13/95
Мітки: зондування, допомогою, дистанційного, спосіб, відносних, змін, вимірювання, температури, акустичного, повітря, атмосфери
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Попередній патент: Спосіб визначення днк культур lactococcus lactis subsp. lactic та lactococcus lactis subsp. cremoris методом полімеразної ланцюгової реакції
Наступний патент: Ортопедичний пристрій і спосіб його виготовлення
Випадковий патент: Пристрій для створення вакууму всередині звичайного пакета