Багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв
Номер патенту: 108222
Опубліковано: 11.07.2016
Автори: Васюченко Павел Вікторович, Іщенко Вікторія Сергіївна, Курцева Лілія Борисівна


Формула / Реферат
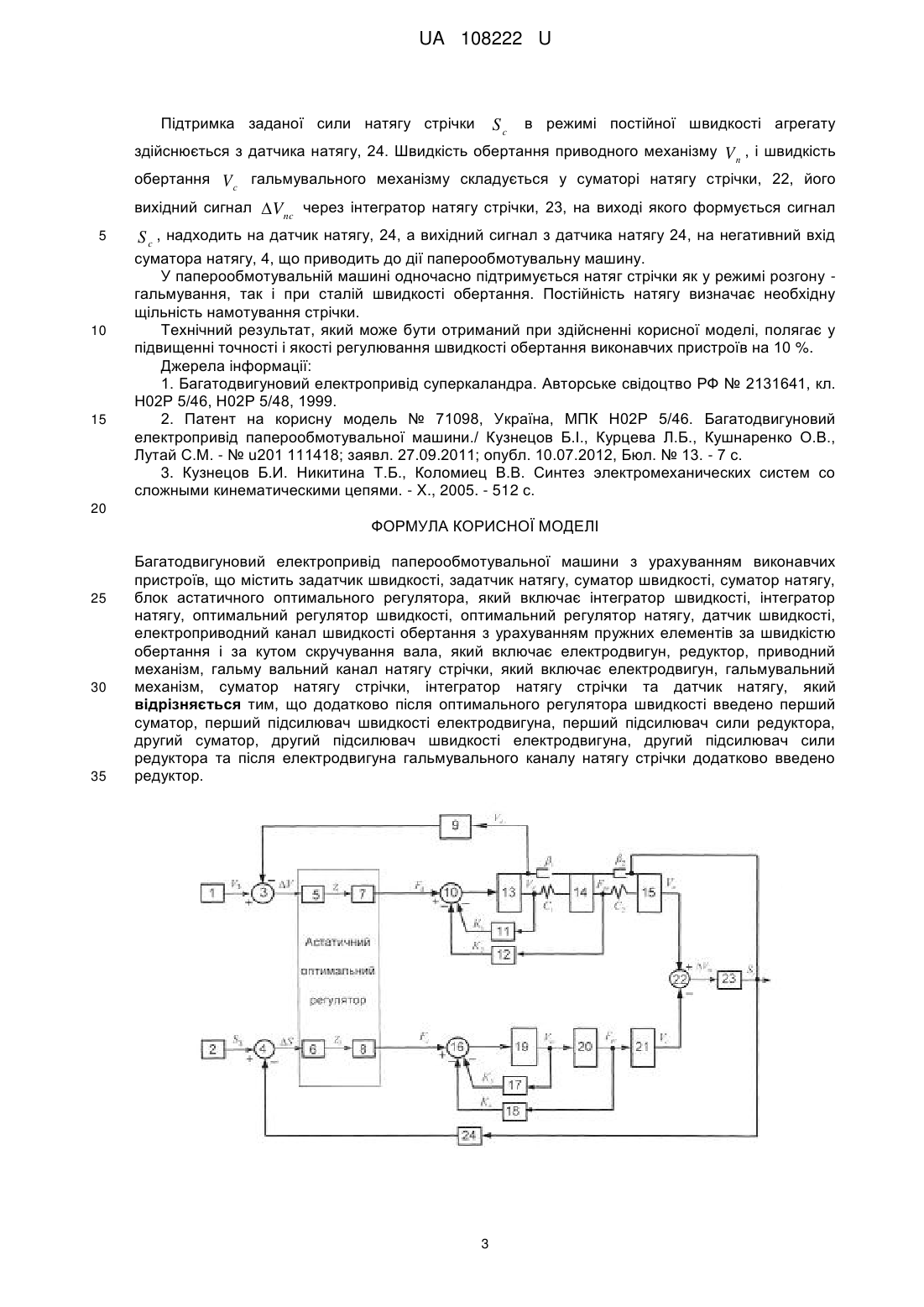
Багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв, що містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю обертання і за кутом скручування вала, який включає електродвигун, редуктор, приводний механізм, гальму вальний канал натягу стрічки, який включає електродвигун, гальмувальний механізм, суматор натягу стрічки, інтегратор натягу стрічки та датчик натягу, який відрізняється тим, що додатково після оптимального регулятора швидкості введено перший суматор, перший підсилювач швидкості електродвигуна, перший підсилювач сили редуктора, другий суматор, другий підсилювач швидкості електродвигуна, другий підсилювач сили редуктора та після електродвигуна гальмувального каналу натягу стрічки додатково введено редуктор.
Текст
Реферат: Багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю обертання і за кутом скручування вала, який включає електродвигун, редуктор, приводний механізм, гальмувальний канал натягу стрічки, який включає електродвигун, гальмувальний механізм, суматор натягу стрічки, інтегратор натягу стрічки та датчик натягу. Додатково після оптимального регулятора швидкості введено перший суматор, перший підсилювач швидкості електродвигуна, перший підсилювач сили редуктора, другий суматор, другий підсилювач швидкості електродвигуна, другий підсилювач сили редуктора. Після електродвигуна гальмувального каналу натягу стрічки додатково введено редуктор. UA 108222 U (12) UA 108222 U UA 108222 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі систем автоматичного регулювання. Відомий "Багатодвигуновий електропривід суперкаландра" [1], який містить задатчики натягу оброблюваного полотна в проміжках розмотування рулону - каландр і каландр - накат, датчики радіусів рулонів розмотування і накату, а також електропривод розмотування, що містить гальмувальний генератор, датчик натягу і регулятор натягу, причому вихід датчика пов'язаний з другим входом регулятора, перший вхід якого підключений до виходу задатчика натягу розмотування - каландр, електропривод каландра, що містить електродвигун, датчик швидкості на його валу, автоматичну систему регулювання швидкості, перший вхід якої сполучений із задатчиком інтенсивності, а другий вхід - з датчиком швидкості, і електропривод накату, що складається з електродвигуна, автоматичної системи регулювання електрорушійної сили цього двигуна, вхід якої сполучений із задатчиком інтенсивності, а вихід - з обмоткою збудження електродвигуна, автоматичну систему регулювання струму якоря двигуна, датчика натягу і регулятора натягу, причому вихід пов'язаний з другим входом регулятора, перший вхід якого підключений до виходу задатчика натягу каландр - накат, а вихід - до першого входу автоматичної системи регулювання струму якоря двигуна. Недоліком відомого електропривода є те, що автоматичний регулятор натягу паперообмотувальних елементів не забезпечує вимог, що пред'являються до нього. Найбільш близьким до запропонованого за технічним рішенням, обраним як прототип є "Багатодвигуновий електропривід паперообмотувальної машини" [2], який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю скручування 1 , 2 по куту скручування C1 , C 2 вала, який включає електродвигун, редуктор, приводний механізм, гальмувальний канал натягу стрічки, який включає підсилювач потужності, електродвигун, гальмувальний механізм, суматор натягу стрічки, інтегратор натягу стрічки та датчик натягу. Недоліком пристрою-прототипу є те, що побічно враховані обмеження на величини коефіцієнтів підсилення астатичного оптимального регулятора, що впливає на підтримку заданої швидкості обертання виконавчих пристроїв. В основу корисної моделі поставлена задача створити багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв, який забезпечить підвищення точності і якості регулювання швидкості обертання виконавчих пристроїв. Поставлена задача вирішується за рахунок того, що у пристрій прототип, який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю обертання і за кутом скручування вала, який включає електродвигун, редуктор, приводний механізм, гальмувальний канал натягу стрічки, який включає електродвигун, гальмувальний механізм, суматор натягу стрічки, інтегратор натягу стрічки та датчик натягу, додатково після оптимального регулятора швидкості введено перший суматор, перший підсилювач швидкості електродвигуна, перший підсилювач сили редуктора, замість підсилювача потужності введено другий суматор, другий підсилювач швидкості електродвигуна, другий підсилювач сили редуктора та після електродвигуна гальмувального каналу натягу стрічки додатково введено редуктор. На кресленні представлена блок-схема багатодвигунового електроприводу, що пропонується. Запропонований багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв містить задатчик швидкості, 1, задатчик натягу, 2, суматор швидкості, 3, суматор натягу, 4, блок астатичного оптимального регулятора, який включає інтегратор швидкості, 5, інтегратор натягу, 6, оптимальний регулятор швидкості, 7, оптимальний регулятор натягу, 8, датчик швидкості, 9, перший суматор, 10, перший підсилювач швидкості електродвигуна, 11, перший підсилювач сили редуктора, 12, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю обертання і за кутом скручування вала, який включає електродвигун, 13, редуктор, 14, приводний механізм, 15, другий суматор, 16, другий підсилювач швидкості електродвигуна, 17, другий підсилювач сили редуктора, 18, гальмувальний канал натягу стрічки, який включає електродвигун, 19, редуктор, 20, гальмувальний механізм, 21, суматор натягу стрічки, 22, інтегратор натягу стрічки, 23 та датчик натягу, 24. 1 UA 108222 U 5 10 Принцип дії багатодвигунового електроприводу паперообмотувальної машини полягає у наступному. Паперообмотувальна машина складається з електроприводного каналу, який включає: приводний виконавчий пристрій, (елементи 9-13), редуктор, 14, приводний механізм, 15; і гальмувального каналу, який включає: гальмувальний виконавчий пристрій (елементи 1619), редуктор, 20, гальмувальний механізм, 21, та з пристрою паперообмотувальної стрічки (елементи 22-24). За допомогою задатчика швидкості, 1, сигнал V з надходить на позитивний вхід суматора швидкості, 3, а на негативний вхід - сигнал V d з виходу датчика швидкості, 9, від електродвигуна, 13, тому різність сигналів швидкості [3] V Vз Vd , (1) діє на вхід інтегратора швидкості, 5, і передає сигнал допоміжної змінної Z 1 на оптимальний регулятор швидкості, 7. Оптимальний регулятор швидкості, 7, вироблює управляючий сигнал - силу Fd , яка 15 приводить до обертання електроприводний канал швидкості з урахуванням пружних елементів за швидкістю обертання 1 , 2 і за кутом скручування C1 , C 2 вала (елементи 9-15). Величина Vd швидкості обертання електродвигуна [3] приводного виконавчого пристрою визначається наступним рівнянням 20 dVd Fd K1 Vd K 2 Fpn , (2) dt де K1 - коефіцієнт підсилення електродвигуна приводного виконавчого пристрою, K 2 - коефіцієнт підсилення сили редуктора приводного виконавчого пристрою; Fpn - сила редуктора електроприводного каналу швидкості обертання, Н. Сигнал завдання натягу S з від задатчика натягу, 2, надходить на перший вхід суматора натягу, 4, а на другий вхід - сигнал натягу стрічки S c , тому різність сигналів натягу S S з S c , (3) 25 діє на вхід інтегратора натягу, 6, і передає сигнал допоміжної змінної оптимального регулятора натягу, 8. Регулятор натягу, 8, вироблює управляючий сигнал силу Fг , яка Z 2 на вхід приводить до обертання гальмувальний канал натягу стрічки (елементи 16-21) з швидкістю обертання електродвигуна Vдг . 30 Величина швидкості обертання електродвигуна Vдг гальму вального виконавчого пристрою [3] визначається як dVc U m K 3 Vдг К 4 Fрг , (4) dt де K 3 - коефіцієнт підсилення редуктора гальму вального виконавчого пристрою, 35 K 4 - коефіцієнт підсилення електродвигуна гальму вального виконавчого пристрою; Fрг - сила редуктора гальмувального каналу натягу стрічки, Н. Величина Fрг , визначається швидкістю зміни рейки редуктора гальмувального каналу натягу стрічки dFрг dt Vдг . Сила натягу S с пристрою паперообмотувальної стрічки визначається 40 dSc Vnc ,(6) dt де Vnc - різність швидкості обертання приводного і гальмувального механізмів. 2 UA 108222 U Підтримка заданої сили натягу стрічки S c в режимі постійної швидкості агрегату здійснюється з датчика натягу, 24. Швидкість обертання приводного механізму V п , і швидкість обертання V с гальмувального механізму складується у суматорі натягу стрічки, 22, його вихідний сигнал Vnc через інтегратор натягу стрічки, 23, на виході якого формується сигнал 5 10 15 S c , надходить на датчик натягу, 24, а вихідний сигнал з датчика натягу 24, на негативний вхід суматора натягу, 4, що приводить до дії паперообмотувальну машину. У паперообмотувальній машині одночасно підтримується натяг стрічки як у режимі розгону гальмування, так і при сталій швидкості обертання. Постійність натягу визначає необхідну щільність намотування стрічки. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у підвищенні точності і якості регулювання швидкості обертання виконавчих пристроїв на 10 %. Джерела інформації: 1. Багатодвигуновий електропривід суперкаландра. Авторське свідоцтво РФ № 2131641, кл. Н02Р 5/46, Н02Р 5/48, 1999. 2. Патент на корисну модель № 71098, Україна, МПК Н02Р 5/46. Багатодвигуновий електропривід паперообмотувальної машини./ Кузнецов Б.І., Курцева Л.Б., Кушнаренко О.В., Лутай С.М. - № u201 111418; заявл. 27.09.2011; опубл. 10.07.2012, Бюл. № 13. - 7 с. 3. Кузнецов Б.И. Никитина Т.Б., Коломиец В.В. Синтез электромеханических систем со сложными кинематическими цепями. - X., 2005. - 512 с. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв, що містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів за швидкістю обертання і за кутом скручування вала, який включає електродвигун, редуктор, приводний механізм, гальму вальний канал натягу стрічки, який включає електродвигун, гальмувальний механізм, суматор натягу стрічки, інтегратор натягу стрічки та датчик натягу, який відрізняється тим, що додатково після оптимального регулятора швидкості введено перший суматор, перший підсилювач швидкості електродвигуна, перший підсилювач сили редуктора, другий суматор, другий підсилювач швидкості електродвигуна, другий підсилювач сили редуктора та після електродвигуна гальмувального каналу натягу стрічки додатково введено редуктор. 3 UA 108222 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 5/46
Мітки: електропривід, машини, пристроїв, паперообмотувальної, багатодвигуновий, виконавчих, урахуванням
Код посилання
<a href="https://ua.patents.su/6-108222-bagatodvigunovijj-elektroprivid-paperoobmotuvalno-mashini-z-urakhuvannyam-vikonavchikh-pristrov.html" target="_blank" rel="follow" title="База патентів України">Багатодвигуновий електропривід паперообмотувальної машини з урахуванням виконавчих пристроїв</a>
Багатодвигуновий електропривід паперообмотувальної машини з пружними елементами за каналом швидкості
Номер патенту: 105548
Опубліковано: 25.03.2016
Автори: Курцева Лілія Борисівна, Власов Артем Олександрович
МПК: H02P 5/46
Мітки: швидкості, багатодвигуновий, елементами, електропривід, каналом, паперообмотувальної, пружними, машини
Формула / Реферат:
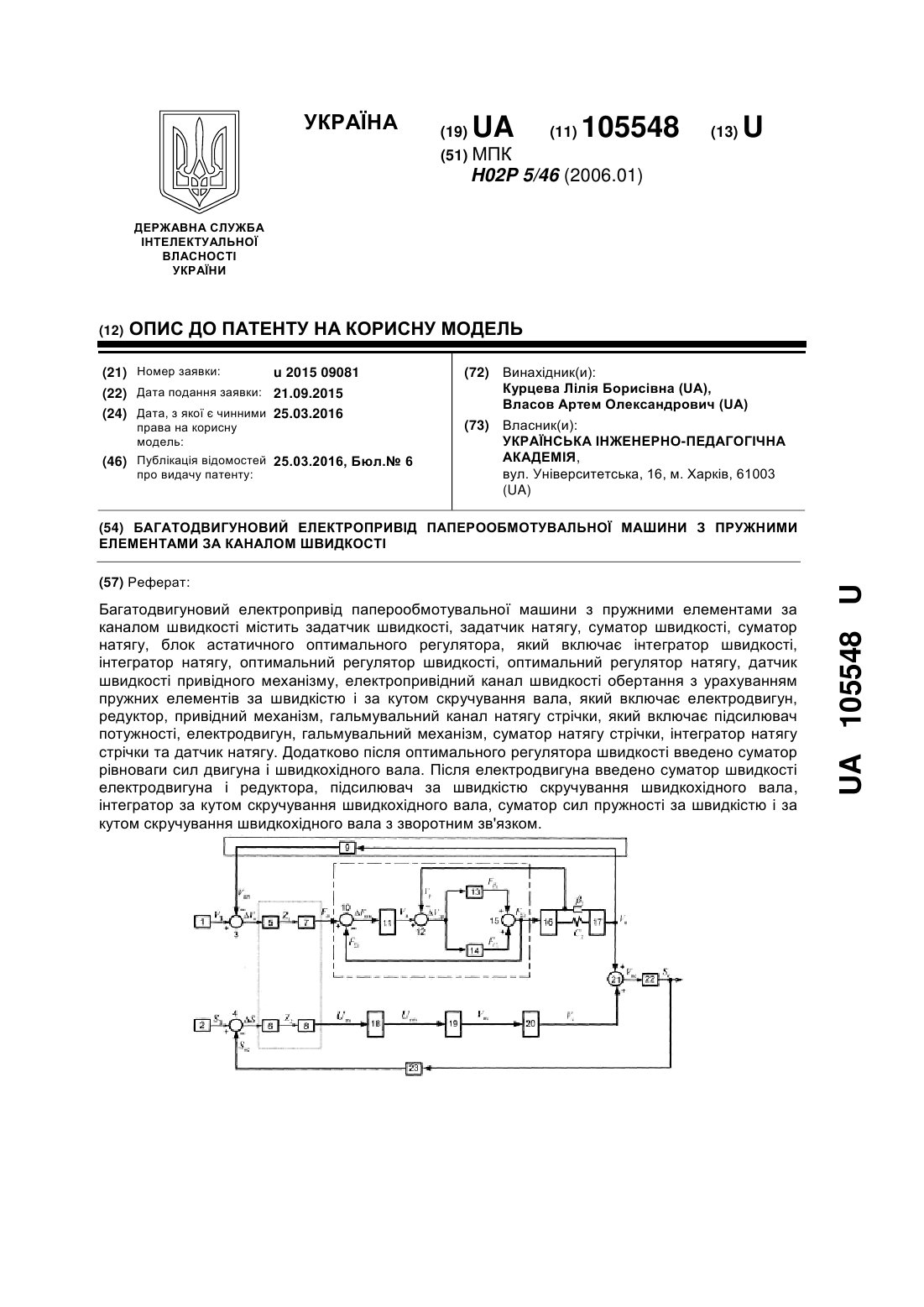
Багатодвигуновий електропривід паперообмотувальної машини з пружними елементами за каналом швидкості, який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електропривідний канал швидкості обертання з урахуванням пружних елементів за...
Багатодвигуновий електропривід паперообмотувальної машини
Номер патенту: 71098
Опубліковано: 10.07.2012
Автори: Кузнецов Борис Іванович, Кушнаренко Олексій Вікторович, Лутай Сергій Миколайович, Курцева Лілія Борисівна
МПК: H02P 5/46
Мітки: електропривід, паперообмотувальної, багатодвигуновий, машини
Формула / Реферат:
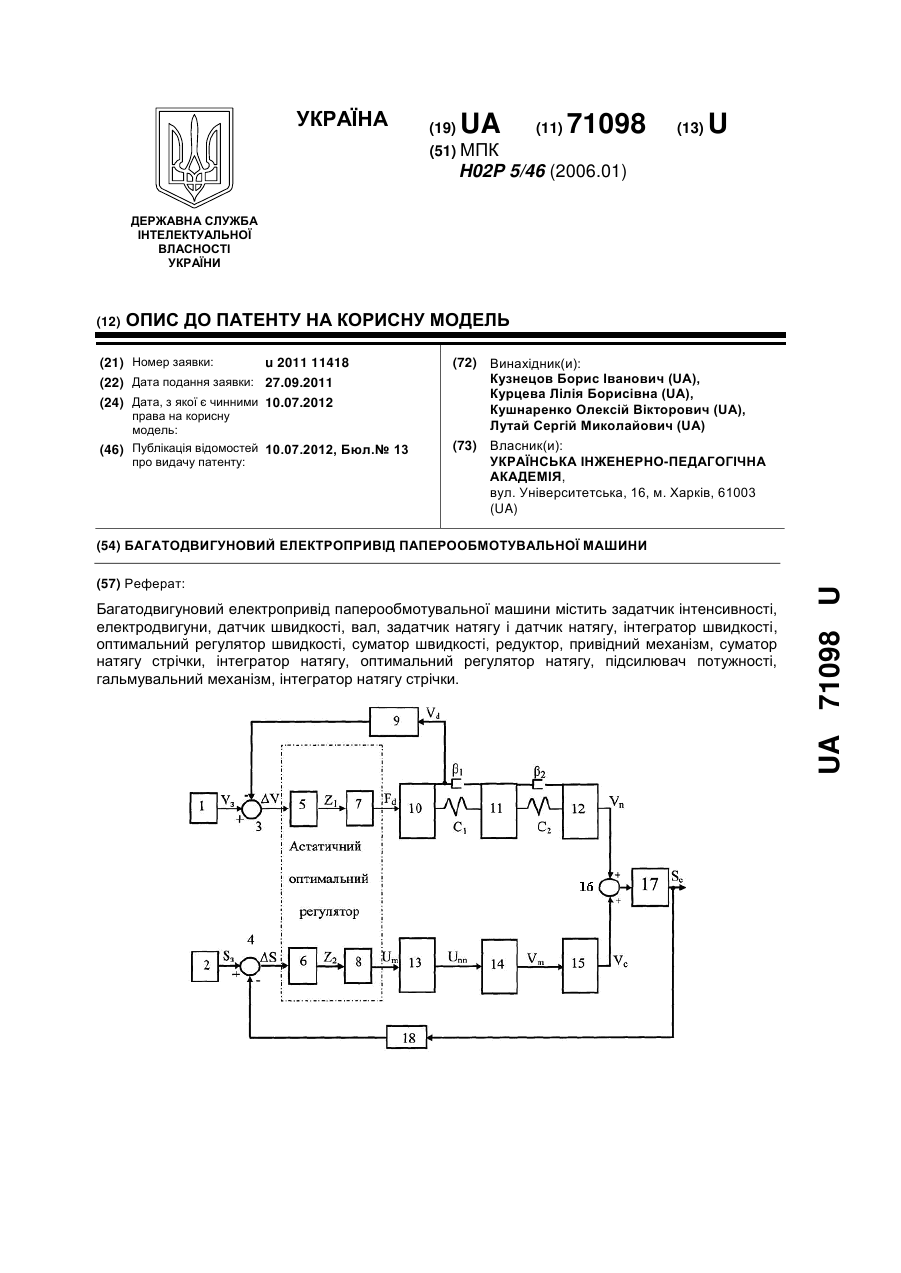
Багатодвигуновий електропривід паперообмотувальної машини містить задатчик інтенсивності, електродвигун, датчик швидкості на його валу, задатчик натягу і датчик натягу, який відрізняється тим, що введений блок астатичного оптимального регулятора, який містить інтегратор швидкості, оптимальний регулятор швидкості, вихід якого з'єднаний з першим входом електропривідного каналу швидкості обертання вала з урахуванням пружних елементів за...
Багатодвигуновий електропривод паперообмотувальної машини з додатковими можливостями за каналом швидкості
Номер патенту: 106310
Опубліковано: 25.04.2016
Автори: Кучінка Роман Володимирович, Курцева Лілія Борисівна
МПК: H02P 5/46
Мітки: паперообмотувальної, каналом, можливостями, багатодвигуновий, швидкості, додатковими, електропривод, машини
Формула / Реферат:
Багатодвигуновий електропривод паперообмотувальної машини з додатковими можливостями за каналом швидкості, який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних елементів...
Багатодвигуновий електропривод паперообмотувальної машини з додатковими можливостями за каналом натягу
Номер патенту: 106441
Опубліковано: 25.04.2016
Автори: Курцева Лілія Борисівна, Сметанін Валентин Сергійович
МПК: H02P 5/46
Мітки: натягу, можливостями, каналом, електропривод, багатодвигуновий, машини, паперообмотувальної, додатковими
Формула / Реферат:
Багатодвигуновий електропривод паперообмотувальної машини з додатковими можливостями за каналом натягу, який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електропривідний канал швидкості обертання з урахуванням пружних елементів за...
Багатодвигуновий електропривод паперообмотувальної машини з пружними елементами тихохідного вала за каналом швидкості

Номер патенту: 106942
Опубліковано: 10.05.2016
Автори: Курцева Лілія Борисівна, Колєснік Дмитро Віталійович
МПК: H02P 5/46
Мітки: вала, паперообмотувальної, пружними, тихохідного, елементами, каналом, машини, багатодвигуновий, електропривод, швидкості
Формула / Реферат:
Багатодвигуновий електропривод паперообмотувальної машини з пружними елементами тихохідного вала за каналом швидкості, який містить задатчик швидкості, задатчик натягу, суматор швидкості, суматор натягу, блок астатичного оптимального регулятора, який включає інтегратор швидкості, інтегратор натягу, оптимальний регулятор швидкості, оптимальний регулятор натягу, датчик швидкості, електроприводний канал швидкості обертання з урахуванням пружних...
Попередній патент: Спосіб виробництва фондану з фруктово-ягідною начинкою
Наступний патент: Багатодвигуновий електропривід зміни радіуса розмотування пристрою паперообмотувальної стрічки
Випадковий патент: Спосіб виготовлення леза для гоління