Гравірувальний верстат “алмаз”



Формула / Реферат
1. Гравірувальний верстат, який містить блок керування та станину у вигляді профілів, зібраних у прямокутну раму на регульованих ніжках, на якій кріпиться система лінійних переміщень та приводів осей X та Y та Z, що містить ударну головку, щонайменше три каретки з рейковими напрямними, кулько-гвинтові пари та кабелеукладачі, з'єднані із кроковими двигунами, який відрізняється тим, що гвинт кулько-гвинтової пари осі Y, поперечні профілі станини з одного боку разом з ніжками та гвинтом осі Y дещо виступають за межі конструкції рами, при цьому один кінець гвинта впирається в кулько-гвинтову пару, який за допомогою двигуна приводить в рух гайку на гвинті, яка в свою чергу кріпиться до перехідної пластини, що жорстко і перпендикулярно закріплена до іншої пластини, котра з'єднана з кареткою з рейковим напрямними на боковому рамному профілі станини із екструдованого алюмінієвого профілю, а блок керування виконаний на базі електронної плати з процесором, системою вводу-виводу та містить сенсорний екран і вихід на USB.
2. Гравірувальний верстат за п. 1, який відрізняється тим, що ударна головка з'єднана із безколекторним двигуном.
3. Гравірувальний верстат за п. 1, який відрізняється тим, що блок керування має вбудований гучномовець.
Текст
Реферат: UA 109726 U UA 109726 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв художньо-декоративної обробки твердих матеріалів, переважно із каменю, зокрема для нанесення зображень (портретів, малюнків тощо) на плоску поверхню полірованого виробу, на гранітні чи схожі породи каменю. Найближчим аналогом є відомий гравірувальний верстат російського виробника "SAUNO" (інтернет-ресурс http://www.sauno.com.ua/#!untitled/c1954), який являє собою прямокутну рамну конструкцію станини на ніжках, які дозволяють регулювати висоту, та містить систему лінійних переміщень і приводів осей X (поперечного переміщення), осі У (поздовжнього переміщення) та осі Z (вертикального переміщення). Система містить каретки з рейковим напрямними, кулькогвинтові пари (КГП), кабелеукладачі, з'єднані із кроковими двигунами та ударну головку. Управління системою здійснюють за допомогою блока керування, який потребує під'єднання до комп'ютера. Однак розташування гвинта кулько-гвинтової пари (КГП) осі Y всередині конструкції прямокутної рамної станини у цьому пристрої призводить до наявності плеча відносно місця кріплення гайки, і через його дію (сила помножена на плече) деформує конструкцію в найбільш слабкому її місці, а це, в свою чергу, неминуче призводить до появи спотворень на зображенні у вигляді смуг різної яскравості. Також більшість гвинтів КГП мають заводський або набутий брак внаслідок неякісного виготовлення, транспортування, обробки країв тощо. Результатом цього є неминуче биття вала довкола своєї осі. Таке биття призводить до розхитування конструкції верстата, люфтів та похибок. Проявами таких похибок є пропуск рядків та "смугастість" (білі та темні смужки, пропорційні кроку гвинта КГП) гравірованого зображення. Для запобігання цьому використовують такі рішення як додавання жорсткості всій конструкції, еластичне кріплення гайки до системи, калібрування гвинтів та ін. Такі рішення ускладнюють конструкцію верстата, процес його обслуговування і призводять до здорожчання пристрою. Крім того, громіздка конструкція даного гравірувального верстата, робота якого неможлива без додаткового устаткування, зокрема потребує підключення до комп'ютера, робить цей верстат стаціонарним і ускладнює його переміщення. В основу корисної моделі поставлена задача забезпечити мінімальне розхитування гвинта кулько-гвинтової пари (КГП) осі Y, що дозволить покращити якість нанесення зображень, а також спростити та здешевити конструкцію гравірувального верстата і забезпечити довговічність, простоту роботи та обслуговування пристрою. Поставлена задача вирішується тим, що у гравірувальному верстаті, який складається із прямокутної рамної станини на регульованих ніжках, на якій кріпиться система лінійних переміщень і приводів осі X - поперечного переміщення, осі У - поздовжнього переміщення та осі Z - вертикального переміщення, система містить щонайменше три каретки з рейковими напрямними та кроковими двигунами, щонайменше дві кулько-гвинтові пари, кабелеукладачі та ударну головку, а управління системою здійснюється за допомогою блока керування, згідно з корисною моделлю, гвинт кулько-гвинтової пари осі Y розташований між протилежними поперечними профілями рами станини, які винесені за межі конструкції рами, причому один кінець гвинта впирається в опорний підшипник вала кулько-гвинтової пари осі Y із двигуном для приведення в рух гайки на гвинті, яка в свою чергу прикріплена до перехідної пластини, перпендикулярно жорстко закріпленої до іншої пластини, що з'єднана з кареткою на рейкових напрямних, розміщених на боковому рамному профілі станини із екструдованого алюмінієвого профілю, блок керування являє собою електронну плату з процесором, системою вводу-виводу та містить сенсорний екран і вихід на USB порт. Блок керування також містить гучномовець. Розташування гвинта КГП осі Y поза рамою верстата призводить до того, що гвинт не має суттєвого плеча дії сили радіального биття вигину, а його кривизна гаситься абсолютною жорсткістю каретки та опорного підшипника вала КГП. Використання на обох приводах осей X та Y кулько-гвинтових пар (КГП) значно пришвидшує темп роботи та подовжує загальний ресурс верстата. Точність переміщення гравірувальної голки забезпечується тим, що кожний привід взаємодіє з відповідною кульково-гвинтовою парою (КГП). Кріплення гайки за допомогою перпендикулярно з'єднаних пластин відіграє значну роль в гашенні коливань гвинта внаслідок його кривизни. Каретки верстата кріпляться на рейкові напрямні по боковому рамному профілю станини, яка виконана із екструдованого алюмінієвого профілю, зібраного у монолітну жорстку конструкцію. Це дозволяє полегшити вагу конструкції в цілому, але дає рамній станині верстата необхідну жорсткість та забезпечує запас міцності та надійності. Таке конструктивне рішення дозволяє спростити та здешевити конструкцію гравірувального верстата, завдяки меншим вимогам до жорсткості всієї конструкції рами; дозволяє збільшити довговічність роботи пристрою і покращити характеристики нанесення зображення. Вбудований блок керування на базі електронної плати з процесором дозволяє зчитувати дані напряму із USB флеш-носія та виводити дані на сенсорний екран. Сенсорний дисплей 1 UA 109726 U 5 10 15 20 25 30 35 40 45 50 55 60 дозволяє візуалізувати роботу системи, вводити параметри гравірування в програму контроллера блока керування: щільність точок, кількість проходів та інші. Авторська програма управління задає унікальні перетворення зображення і алгоритми друку, керує роботою двигунів, що дозволяє напряму здійснювати друк зображень. Також реалізована функція попереднього показу ударною головкою (алмазною голкою) периметра та контуру зображення, що наноситься. Великий набір функцій і опцій друку виключає необхідність підключення до комп'ютера та дозволяє працювати в автономному режимі, що суттєво спрощує роботу верстата, і робить його більш легким і економічним, а також мобільним та зменшує вірогідність збоїв системи внаслідок перебоїв з живленням. Вбудований гучномовець в блоці керування дозволяє роботу гравірувальний верстата в навчальному режимі. Через гучномовець озвучується набір та послідовність команд, необхідних для роботи верстата, що дозволяє легко та швидко пройти навчання оператору. Ударна головка з'єднана із безколекторним двигуном потужністю 24 або 26 В, який може працювати 24 години на добу без перевищення своїх гранично допустимих параметрів та дозволяє глибоке пробивання в широкому діапазоні струму, що забезпечує плавність переходу відтінків в декоруванні зображень, які наносять на камінь. На кресленні наведений запропнований гравірувальний верстат, загальний вигляд. Гравірувальний верстат складається із прямокутної рамної станини 1 з вбудованим блоком керування 2 із сенсорним екраном 3 та виходом на USB порт 4. Блок керування 2 регулює роботу системи лінійних переміщень і приводів осей X (поперечного переміщення), осі У (поздовжнього переміщення) та осі Z (вертикального переміщення). Вісь X включає кулькогвинтову пару (КГП), яка містить гвинт 5, до якого за допомогою лапи 6 прикріплена ударна головка, яка знаходиться в коробі 18. Короб 18 з'єднаний із кареткою 7, яка накладена на рейкові напрямні 8 і приводиться в рух кроковим двигуном 9, що через кабелеукладач 10 (на кресленні не показано) з'єднаний із електропроводами від блока управління 2, які укладені в поперечній станині рами 1. Поперечні профілі рамної станини 1 з одного боку разом з ніжками та гвинтом 11 осі Y дещо виступають за межі конструкції рамної станини 1, при цьому один кінець гвинта 11 впирається в опорний підшипник КГП осі Y (на рисунку не показано). Іншим кінцем гвинт 11 впирається в підшипник всередині продовженого профілю протилежної станини рами 1 і через кабелеукладач 12 (на рисунку не показано) з'єднується з кроковим двигуном 13. На гвинті 11 розміщена гайка 14, яка прикріплена до системи перехідних пластин 15, що жорстко закріплені перпендикулярно одна до одної та до каретки 16, яка разом із кареткою 17 рухається вздовж рейкових напрямних 8 рамної станини 1. Двигун 13 приводить в рух гайку 14, яка лінійно рухається вздовж гвинта 11. Система лінійних переміщень та приводів осей Z не показані, оскільки поміщені в закритий короб 18. Конструктивні елементи в даному випадку є стандартні та не несуть в собі новизни (за винятком безколекторного двигуна 19). Система лінійних переміщень та приводів осей Z включає ударну головку із алмазною голкою, при цьому ударна головка через кабелеукладач з'єднана з кареткою та електромеханічним віброгенератором, що працює на базі безколекторного двигуна. Гравірувальний верстат працює наступним чином: Після вмикання верстата за допомогою кнопки включення на блоці керування 2 пристрій готовий для роботи. Зображення, яке буде друкуватися на заготовці, переноситься з флешносія через USB 4 до блока керування 2, який зв'язаний електрично (через електропроводи від блока управління 2, які укладені в поперечній станині рами 1) зі всіма основними функціональними вузлами гравірувального верстата (системи лінійних переміщень та приводів осей X та Y та Z). Далі необхідні параметри друку і опції виставляють безпосередньо на блоці керування 2 і візуалізуються на семидюймовому сенсорному дисплеї 3. Після отримання команди від блока керування 2, починається процес створення зображення на кам'яній поверхні заготовки. Це здійснюється за рахунок зворотного поступового переміщення гравірувальної алмазної голки ударної головки, зв'язаної з електромеханічним віброгенератором на базі безколекторного двигуна. Сила удару алмазної голки ударної головки та частота регулюються оператором або автоматично. Після нанесення удару алмазна голка ударної головки переміщується (позиціонується) над поверхнею заготовки за допомогою кареток 7 (поперечного переміщення (осі X), поздовжнього переміщення 16 та 17 (осі У) та вертикального переміщення осі Z. Переміщення цих кареток по рейкових напрямних 8 здійснюють за допомогою крокових двигунів 9 (осі X), 13(осі У), та 19 (осі Z). Крім того, точність переміщення цих кареток досягається за рахунок того, що вони взаємодіють з жорсткою конструкцією каркаса рамної станини 1 верстата, а стабільність положення кареток 7 (осі X), 16 і 17 (осі У) та каретки осі Z забезпечують за допомогою рейкових напрямних 8 (осі Z на рис не показано) на профілях 2 UA 109726 U 5 10 15 20 рамної станини 1. Наявність кабелеукладачів 10 осі X (на рисунку не показано), 12 осі У та осі Z (на рисунку не показано) у верстаті дозволяє запобігти деформації провідників електричної енергії, які підведені до блока керування 2. Пропонована корисна модель забезпечує наступні переваги: - невелика вага й габаритні розміри конструкції, що полегшує транспортування, зберігання, а також використання в невеликих майстернях; - висока швидкість обробки і гравірування зображень; - використання на обох приводах КГП значно пришвидшує темп роботи, точність та подовжує загальний ресурс верстата; - стійкість до перебоїв енергопостачання та мінімальне енергоспоживання; - автономність і незалежність від комп'ютера в процесі роботи; - перенесення і завантаження зображень для гравірування здійснюється за допомогою USBфлешки; - легке керування верстатом за допомогою сенсорного дисплею на блоці управління; - доступність та простота вбудованого програмного забезпечення; - нечуттєвість до різниці у рівнях поверхні каменя; - можливість роботи у вертикальному положенні; - велика глибина гравірування; - мінімальні експлуатаційні витрати та обслуговування; - великий ресурс деталей та елементів; - легкість навчання оператора верстата, що не потребує спеціальних знань; - мінімальні витрати експлуатації та обслуговування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 1. Гравірувальний верстат, який містить блок керування та станину у вигляді профілів, зібраних у прямокутну раму на регульованих ніжках, на якій кріпиться система лінійних переміщень та приводів осей X та Y та Z, що містить ударну головку, щонайменше три каретки з рейковими напрямними, кулько-гвинтові пари та кабелеукладачі, з'єднані із кроковими двигунами, який відрізняється тим, що гвинт кулько-гвинтової пари осі Y, поперечні профілі станини з одного боку разом з ніжками та гвинтом осі Y дещо виступають за межі конструкції рами, при цьому один кінець гвинта впирається в кулько-гвинтову пару, який за допомогою двигуна приводить в рух гайку на гвинті, яка в свою чергу кріпиться до перехідної пластини, що жорстко і перпендикулярно закріплена до іншої пластини, котра з'єднана з кареткою з рейковим напрямними на боковому рамному профілі станини із екструдованого алюмінієвого профілю, а блок керування виконаний на базі електронної плати з процесором, системою вводу-виводу та містить сенсорний екран і вихід на USB. 2. Гравірувальний верстат за п. 1, який відрізняється тим, що ударна головка з'єднана із безколекторним двигуном. 3. Гравірувальний верстат за п. 1, який відрізняється тим, що блок керування має вбудований гучномовець. 3 UA 109726 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B44B 3/02
Мітки: верстат, алмаз, гравірувальний
Код посилання
<a href="https://ua.patents.su/6-109726-graviruvalnijj-verstat-almaz.html" target="_blank" rel="follow" title="База патентів України">Гравірувальний верстат “алмаз”</a>
Верстат гравірувальний
Номер патенту: 60359
Опубліковано: 10.06.2011
Автор: Свищ Олександр Петрович
МПК: B44B 3/00
Мітки: верстат, гравірувальний
Формула / Реферат:
Верстат гравірувальний, що містить несучий каркас із закріпленим до нього мікропроцесорним блоком керування, що має на лицьовій поверхні засоби візуалізації параметрів процесу утворення зображення, а також кнопки керування і введення основних параметрів роботи пристрою, при цьому каркас взаємодіє з каретками, на одній з яких закріплений функціональний блок - виконавчий пристрій, що має гравірувальну голку, який відрізняється тим, що з...
Верстат гравірувальний
Номер патенту: 80971
Опубліковано: 10.06.2013
Автори: Стасюк Володимир Володимирович, Ковтанюк Сергій Васильович, Стасюк Надія Леонідівна, Білинський Йосип Йосипович
МПК: B44B 3/00
Мітки: гравірувальний, верстат
Формула / Реферат:
Верстат гравірувальний, що містить несучий каркас із закріпленим до нього мікропроцесорним блоком керування, що має на лицьовій поверхні засоби візуалізації параметрів процесу утворення зображення, а також кнопки керування і введення основних параметрів роботи пристрою, рухомі каретки поперечного, поздовжнього і вертикального переміщення, встановлені з можливістю взаємодії з несучим каркасом, при цьому кожна рухома каретка має автономний...
Верстат
Номер патенту: 71479
Опубліковано: 10.07.2012
Автори: Усик Вадим Олександрович, Коротун Микола Миколайович
МПК: B23B 39/00
Мітки: верстат
Формула / Реферат:
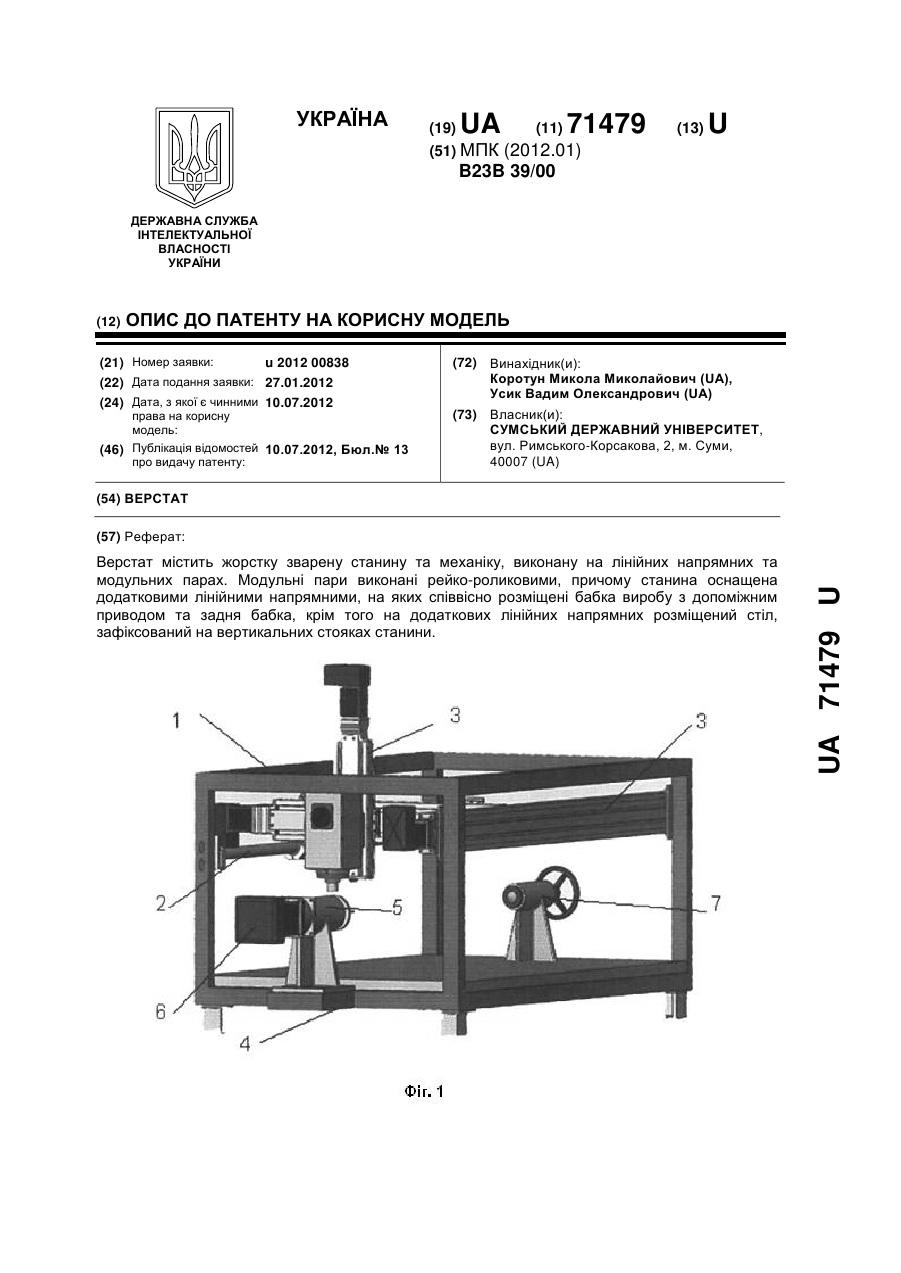
Верстат містить жорстку зварену станину та механіку, виконану на лінійних напрямних та модульних парах, який відрізняється тим, що модульні пари виконані рейко-роликовими, причому станина оснащена додатковими лінійними напрямними, на яких співвісно розміщені бабка виробу з допоміжним приводом та задня бабка, крім того на додаткових лінійних напрямних розміщений стіл, зафіксований на вертикальних стояках станини.
Поздовжньо-різальний верстат
Номер патенту: 63371
Опубліковано: 10.10.2011
Автори: Буяр Євгеній Борисович, Улітько Роман Миколайович
МПК: B23D 19/00
Мітки: верстат, поздовжньо-різальний
Формула / Реферат:
Поздовжньо-різальний верстат, який складається із станини, нижнього ножового вала, приводного вала верхніх ножів, набору верхніх ножів, які закріплюються на опорній балці станини, який відрізняється тим, що з метою полегшення монтажу та ремонту поздовжньо-різального верстата верхні ножі виконані у вигляді кріпильного блока, під яким розташована монтажна консоль з тримачем ножа, який приводиться в рух через пасову передачу.
Агрегатний верстат
Номер патенту: 20783
Опубліковано: 15.02.2007
Автори: Сичев Юрій Іванович, Тимофієв Юрій Вікторович
МПК: B23Q 39/00
Мітки: агрегатний, верстат
Формула / Реферат:
1. Агрегатний верстат, що містить поворотно-ділильний стіл із планшайбою, на якій розташовані пристосування з заготівками і силові головки, розміщені на станині, який відрізняється тим, що пристосування з заготівками встановлені на призматичних направляючих станини, при цьому планшайба поворотно-ділильного столу обладнана складеним мальтійським механізмом повороту і щонайменше 12 пальцями, які кінематично зв'язані з пристосуваннями з...
Попередній патент: Спосіб виробництва діапаузуючої трихограми як біологічного засобу захисту рослин
Наступний патент: Антивандальний світильник
Випадковий патент: Пристрій підзарядки/зарядки акумуляторної батареї цифрового пристрою