Система для виявлення та знищення цілей
Номер патенту: 110311
Опубліковано: 10.12.2015
Автори: Гімбер Сергій Миколайович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Чепков Ігор Борисович, Гринькович Орест Степанович
Формула / Реферат
1. Система для виявлення та знищення цілей, яка включає пристрій для виявлення цілей, що містить платформу, на якій встановлено давач цілі, блок обчислення та керування та з'єднаний з ним прийомопередавач, бойову частину з елементом ураження та прийомопередавачем, яка відрізняється тим, що давач цілі містить дві жорстко встановлені на рамі відеокамери, які рознесені між собою і зведені в просторі, давач азимуту рами і давач кута місця відеокамер, перший та другий відеопроцесори, входи яких з'єднані відповідно з першою та другою відеокамерами, а виходи першого та другого відеопроцесорів з'єднані відповідно з першим та другим входами блока обчислення та керування, третій та четвертий входи якого з'єднані відповідно з давачем азимуту рами і давачем кута місця відеокамер, а також з'єднаний з блоком обчислення та керування GPS пристрій, при цьому платформа розміщена горизонтально до місця встановлення та механічно з'єднана з рамою з можливістю повного повороту останньої в горизонтальній та вертикальній площинах, крім того система містить щонайменше, встановлену на окремій платформі, одну бойову частину, яка додатково містить GPS пристрій, при цьому платформа бойової частини та платформа пристрою для виявлення цілі рознесені між собою в просторі.
2. Система для виявлення та знищення цілей за п. 1, яка відрізняється тим, що бойова частина додатково містить встановлені на платформі блок керування приводом та з'єднані з ним давач кута місця платформи, давач азимуту та привод.
Текст
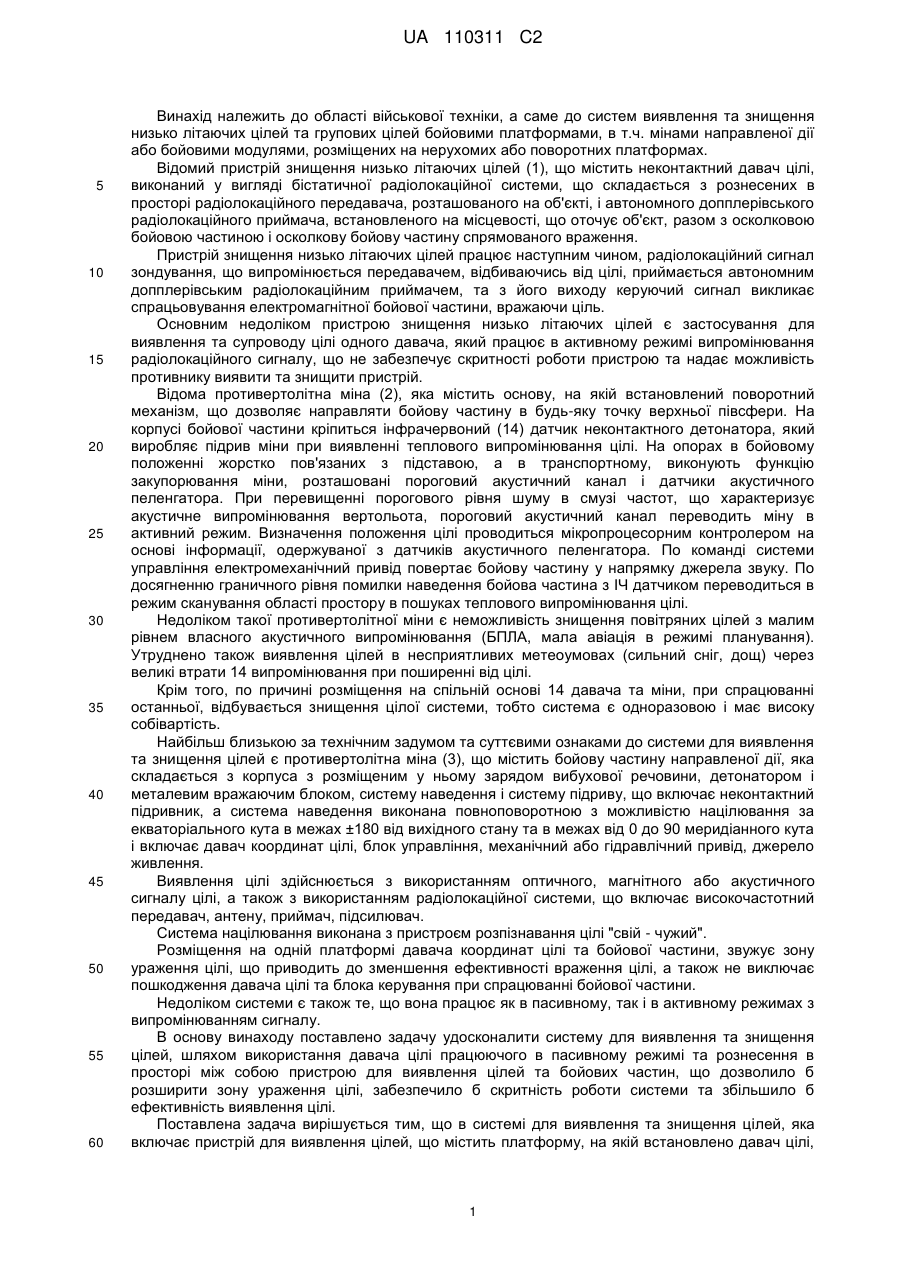
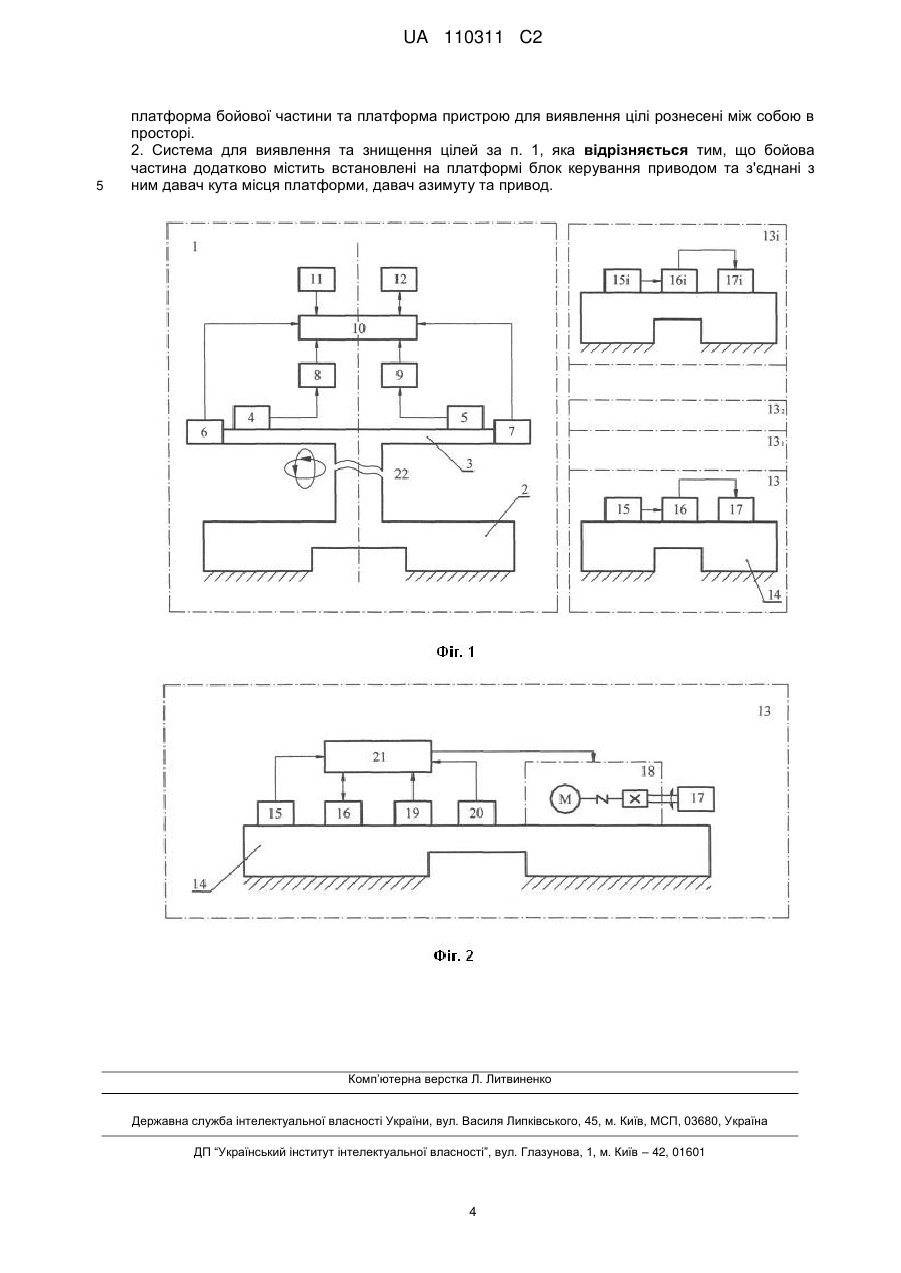
Реферат: Винахід належить до військової техніки, а саме до систем виявлення та знищення низько літаючих цілей та близько розташованих цілей бойовими платформами, в т.ч. мінами направленої дії або бойовими модулями без платформи або з поворотними платформами. Система для виявлення та знищення цілей містить встановлений на платформі пристрій для виявлення цілей, що включає давач цілі, блок обчислення та керування та з'єднаний з ним передавач, бойові частини з приймачами. Давач цілі містить дві жорстко встановлені на рамі відеокамери, які рознесені між собою і зведені в просторі, давач азимуту рами і давач кута місця відеокамер, перший та другий відеопроцесори, входи яких з'єднані відповідно з першою та другою відеокамерами. Виходи першого та другого відеопроцесорів з'єднані відповідно з першим та другим входами блока обчислення та керування, третій та четвертий входи якого з'єднані відповідно з давачем азимуту рами і давачем кута місця відеокамер, а також з'єднаний з блоком обчислення та керування GPS-пристрій. Платформа розміщена горизонтально до місця встановлення та механічно з'єднана з рамою з можливістю повного повороту останньої в горизонтальній та вертикальній площинах. Система містить щонайменше, встановлену на окремій платформі, одну бойову частину, яка додатково містить GPS-пристрій. Платформа UA 110311 C2 (12) UA 110311 C2 бойової частини та платформа пристрою для виявлення цілі рознесені між собою в просторі. Запропонована система дозволяє уникнути активного режиму роботи системи, підвищити точність виявлення та супроводження цілі, а також дозволяє підвищити перешкодозахищеність системи наведення, надійність і стабільність її роботи. UA 110311 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової техніки, а саме до систем виявлення та знищення низько літаючих цілей та групових цілей бойовими платформами, в т.ч. мінами направленої дії або бойовими модулями, розміщених на нерухомих або поворотних платформах. Відомий пристрій знищення низько літаючих цілей (1), що містить неконтактний давач цілі, виконаний у вигляді бістатичної радіолокаційної системи, що складається з рознесених в просторі радіолокаційного передавача, розташованого на об'єкті, і автономного допплерівського радіолокаційного приймача, встановленого на місцевості, що оточує об'єкт, разом з осколковою бойовою частиною і осколкову бойову частину спрямованого враження. Пристрій знищення низько літаючих цілей працює наступним чином, радіолокаційний сигнал зондування, що випромінюється передавачем, відбиваючись від цілі, приймається автономним допплерівським радіолокаційним приймачем, та з його виходу керуючий сигнал викликає спрацьовування електромагнітної бойової частини, вражаючи ціль. Основним недоліком пристрою знищення низько літаючих цілей є застосування для виявлення та супроводу цілі одного давача, який працює в активному режимі випромінювання радіолокаційного сигналу, що не забезпечує скритності роботи пристрою та надає можливість противнику виявити та знищити пристрій. Відома противертолітна міна (2), яка містить основу, на якій встановлений поворотний механізм, що дозволяє направляти бойову частину в будь-яку точку верхньої півсфери. На корпусі бойової частини кріпиться інфрачервоний (14) датчик неконтактного детонатора, який виробляє підрив міни при виявленні теплового випромінювання цілі. На опорах в бойовому положенні жорстко пов'язаних з підставою, а в транспортному, виконують функцію закупорювання міни, розташовані пороговий акустичний канал і датчики акустичного пеленгатора. При перевищенні порогового рівня шуму в смузі частот, що характеризує акустичне випромінювання вертольота, пороговий акустичний канал переводить міну в активний режим. Визначення положення цілі проводиться мікропроцесорним контролером на основі інформації, одержуваної з датчиків акустичного пеленгатора. По команді системи управління електромеханічний привід повертає бойову частину у напрямку джерела звуку. По досягненню граничного рівня помилки наведення бойова частина з ІЧ датчиком переводиться в режим сканування області простору в пошуках теплового випромінювання цілі. Недоліком такої противертолітної міни є неможливість знищення повітряних цілей з малим рівнем власного акустичного випромінювання (БПЛА, мала авіація в режимі планування). Утруднено також виявлення цілей в несприятливих метеоумовах (сильний сніг, дощ) через великі втрати 14 випромінювання при поширенні від цілі. Крім того, по причині розміщення на спільній основі 14 давача та міни, при спрацюванні останньої, відбувається знищення цілої системи, тобто система є одноразовою і має високу собівартість. Найбільш близькою за технічним задумом та суттєвими ознаками до системи для виявлення та знищення цілей є противертолітна міна (3), що містить бойову частину направленої дії, яка складається з корпуса з розміщеним у ньому зарядом вибухової речовини, детонатором і металевим вражаючим блоком, систему наведення і систему підриву, що включає неконтактний підривник, а система наведення виконана повноповоротною з можливістю націлювання за екваторіального кута в межах ±180 від вихідного стану та в межах від 0 до 90 меридіанного кута і включає давач координат цілі, блок управління, механічний або гідравлічний привід, джерело живлення. Виявлення цілі здійснюється з використанням оптичного, магнітного або акустичного сигналу цілі, а також з використанням радіолокаційної системи, що включає високочастотний передавач, антену, приймач, підсилювач. Система націлювання виконана з пристроєм розпізнавання цілі "свій - чужий". Розміщення на одній платформі давача координат цілі та бойової частини, звужує зону ураження цілі, що приводить до зменшення ефективності враження цілі, а також не виключає пошкодження давача цілі та блока керування при спрацюванні бойової частини. Недоліком системи є також те, що вона працює як в пасивному, так і в активному режимах з випромінюванням сигналу. В основу винаходу поставлено задачу удосконалити систему для виявлення та знищення цілей, шляхом використання давача цілі працюючого в пасивному режимі та рознесення в просторі між собою пристрою для виявлення цілей та бойових частин, що дозволило б розширити зону ураження цілі, забезпечило б скритність роботи системи та збільшило б ефективність виявлення цілі. Поставлена задача вирішується тим, що в системі для виявлення та знищення цілей, яка включає пристрій для виявлення цілей, що містить платформу, на якій встановлено давач цілі, 1 UA 110311 C2 5 10 15 20 25 30 35 40 45 50 55 60 блок обчислення та керування та з'єднаний з ним прийомопередавач, бойову частину з елементом ураження та прийомопередавачем, згідно з винаходом, давач цілі містить дві жорстко встановлені на рамі відеокамери, які рознесені між собою і зведені в просторі, давач азимуту рами і давач кута місця відеокамер, перший та другий відеопроцесори, входи яких з'єднані відповідно з першою та другою відеокамерами, а виходи першого та другого відеопроцесорів з'єднані відповідно з першим та другим входами блока обчислення та керування, третій та четвертий входи якого з'єднані відповідно з давачем азимуту рами і давачем кута місця відеокамер, а також з'єднаний з блоком обчислення та керування GPSпристрій, при цьому платформа розміщена горизонтально до місця встановлення та механічно з'єднана з рамою з можливістю повного повороту останньої в горизонтальній та вертикальній площинах, крім того система містить щонайменше, встановлену на окремій платформі, одну бойову частину, яка додатково містить GPS-пристрій, при цьому платформа бойової частини та платформа пристрою для виявлення цілі рознесені між собою в просторі. Крім того, в системі для виявлення та знищення цілей, згідно з винаходом, бойова частина додатково містить встановлені на платформі блок керування приводом та з'єднані з ним давач кута місця платформи, давач азимуту та привод. Виконання давача цілі у вигляді двох жорстко встановлених на рамі відеокамер, рознесених між собою і зведених в просторі, та використання давача азимуту рами і давача кута місця відеокамер, першого та другого відеопроцесорів, входи яких з'єднані відповідно з першою та другою відеокамерами, а виходи першого та другого відеопроцесорів з'єднані відповідно з першим та другим входами блока обчислення та керування, третій та четвертий входи якого, з'єднані відповідно з давачем азимуту рами і давачем кута місця відеокамер, а також використання GPS-пристрою, який з'єднаний з блоком обчислення та керування, дозволяє уникнути активного режиму роботи системи, підвищило точність виявлення та супроводження цілі, а також підвищило перешкодозахищеність системи наведення, надійність і стабільність її роботи. Розміщення на рамі пристрою для виявлення цілей та з'єднання рами з платформою повноповоротною в горизонтальній та вертикальній площинах, а також розміщення бойової частини на окремій платформі та рознесення платформ з бойовою частиною та платформи з пристроєм для виявлення цілі між собою в просторі, збільшує ймовірності ураження цілі за рахунок розширення зони перекриття ураження та усуває можливий підрив пристрою для виявлення цілей при спрацюванні бойової частини. На фіг. 1 зображена блок-схема системи для виявлення та знищення цілей, на фіг. 2 зображена схема бойової частини з поворотною платформою. Система для виявлення та знищення цілей включає (фіг. 1) пристрій для виявлення цілей 1, який містить платформу 2, на якій встановлений давач цілі, який містить дві, жорстко встановлені на рамі 3 відеокамери 4, 5, які рознесені між собою і зведені в просторі, давач азимуту рами 6 і давач кута місця відеокамер 7, перший та другий відеопроцесори 8, 9, входи яких з'єднані відповідно з першою та другою відеокамерами 4, 5, а виходи першого та другого відеопроцесорів 8, 9, з'єднані відповідно з першим та другим входами блока обчислення та керування 10, третій та четвертий входи якого, з'єднані відповідно з давачем азимуту рами 6 і давачем кута місця відеокамер 7, а також з'єднані з блоком обчислення та керування 10, GPSпристрій 11 та прийомопередавач 12. Бойова частина 13 містить платформу 14, на якій встановлені GPS-пристрій 15, прийомопередавач 16, та елемент ураження цілі 17. При виконанні платформи 14 поворотною (фіг. 2), бойова частина 13 додатково містить привод 18, давач кута місця платформи бойової частини 19, давач азимуту 20 та з'єднаний з ними блок керування приводом 21. Рама 3 з'єднана з платформою 2 пристрою для виявлення цілей 1 за допомогою шарнірного з'єднання 22 з можливістю повного повороту рами 3 в горизонтальній та вертикальній площинах. Платформа 14 бойової частини 13 та платформа 2 пристрою для виявлення цілі 1 рознесені між собою в просторі. Усі блоки, що використовуються в системі є стандартними, та можуть бути реалізовані на мікропроцесорах, мікромеханічних давачах та програмованих покупних модулях, так як відеокамери 4, 5 можуть бути використані відеокамери фірми IDS U1-3370CP-M-GL з об'єктивами Navistar, а як відеопроцесори 8, 9 може бути використаний процесорний блок Nano X - ВТ, а як блок обчислення та керування 10 та блок керування приводом 21 може бути використана спеціалізована мікро ЕОМ з відповідним програмним забезпеченням, або можуть бути реалізовані на мікропроцесорах. Система для виявлення та знищення цілей працює наступним чином. 2 UA 110311 C2 5 10 15 20 25 30 35 40 45 50 55 На місцевості встановлюють платформу 2 (фіг. 1) пристрою для виявлення цілей 1, проводять налаштування відеокамер 4, 5 у відповідності до розмірів охоронної зони, шляхом рознесення на необхідну віддаль L та зведення їх між собою на задану віддаль D та шляхом повороту рами 3 стосовно платформи 2 в горизонтальній та вертикальній площинах зводять їх в просторі, формуючи розміри сектора охоронної зони. Після установки бойових частин 13 в секторі охоронної зони проводять за допомогою пристрою виявлення цілей 1 їх реєстрацію, який послідовно опитує введення бойових частин 13, яка проводиться один раз після їх встановлення в секторі охоронної зони та у випадку заміни спрацьованих бойових частин 13. Вводять в блок обчислення та керування 10 дані стосовно віддалі L зміщення між собою відеокамер 4, 5 та віддалі зведення D їх в просторі та запускають пристрій для виявлення цілей 1 в черговий режим. Кадри із зображенням цілі з відеокамер 4, 5 надходять відповідно на відеопроцесори 8, 9, де їх послідовно порівнюють та виділяють рухому ціль. В процесі порівнювання кадрів із цілями, визначають різницю віддалі розміщення їх на полі зображення відносно центру, величина якої надходить в блок обчислення та керування 10. Блок обчислення та керування 10, отримавши інформацію від відеопроцесорів 8, 9 про рухомий об'єкт, шляхом обробки різниці місцеположення між об'єктами відносно центру екрана відеокамер 4, 5, методом паралаксу визначає віддаль до цілі. В блок обчислення та керування 10 з давача азимуту рами 6 та давача кута місця відеокамер 7 надходять дані про азимут та кут місця знаходження відеокамер 4, 5, а з GPSпристрою 11 надходять дані про координати розташування платформи 1 та дані про віддаль до цілі. На основі отриманих вище згаданих даних, блок обчислення та керування 10, згідно з алгоритмом, проводить розрахунок проекції цілі на земну поверхню з метою визначення кількості групи бойових частин 13 з врахуванням їх зони ураження, швидкості і напряму руху цілі. Блок обчислення та керування 10 на основі вищезгаданих даних та на основі інформації про місце положення кожної з бойових частин 13, яка надходить з GPS-пристрою 15 через прийомопередавачі 16, 12, обчислює на основі алгоритму траєкторію польоту цілі і розраховує напрямки можливої появи низько літаючої цілі та визначає для її ураження необхідну бойову частину 13. Далі через прийомопередавач 12 передається інформація на прийомопередавач 16 вибраної бойової частини 13 команда про підрив елемента ураження цілі 17. У варіанті виконання бойової частини 13 (фіг. 2) з поворотною платформою 14, інформація про місце положення цілі в просторі надходить від пристрою виявлення цілі 1 на блок керування приводом 21, на який також надходить інформація від давача кута місця платформи бойової частини 19 та давача азимуту 20, на основі отриманих даних блок керування приводом 21 обчислює кути повороту платформи 14. Блок керування приводом 21 на основі отриманих даних за допомогою приводу 15 наводить визначену бойову частину 13 на ціль і проводить підрив елемента ураження цілі 17. Джерела інформації: 7 1. Патент РФ № 2490583, МПК : F41H11/00, F41H11/12, F41G7/22, опубл. 20.08.2013. 7 2. Патент РФ № 53431, МПК : F42B23/00, опубл. 10.05.2006. 7 3. Патент РФ № 2237859, МПК : F42B23/00, F42B12/56, опубл. 10.10.2004. ФОРМУЛА ВИНАХОДУ 1. Система для виявлення та знищення цілей, яка включає пристрій для виявлення цілей, що містить платформу, на якій встановлено давач цілі, блок обчислення та керування та з'єднаний з ним прийомопередавач, бойову частину з елементом ураження та прийомопередавачем, яка відрізняється тим, що давач цілі містить дві жорстко встановлені на рамі відеокамери, які рознесені між собою і зведені в просторі, давач азимуту рами і давач кута місця відеокамер, перший та другий відеопроцесори, входи яких з'єднані відповідно з першою та другою відеокамерами, а виходи першого та другого відеопроцесорів з'єднані відповідно з першим та другим входами блока обчислення та керування, третій та четвертий входи якого з'єднані відповідно з давачем азимуту рами і давачем кута місця відеокамер, а також з'єднаний з блоком обчислення та керування GPS-пристрій, при цьому платформа розміщена горизонтально до місця встановлення та механічно з'єднана з рамою з можливістю повного повороту останньої в горизонтальній та вертикальній площинах, крім того система містить щонайменше, встановлену на окремій платформі, одну бойову частину, яка додатково містить GPS-пристрій, при цьому 3 UA 110311 C2 5 платформа бойової частини та платформа пристрою для виявлення цілі рознесені між собою в просторі. 2. Система для виявлення та знищення цілей за п. 1, яка відрізняється тим, що бойова частина додатково містить встановлені на платформі блок керування приводом та з'єднані з ним давач кута місця платформи, давач азимуту та привод. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDetection and destruction of targets
Автори англійськоюOliiarnyk Bohdan Oleksiyovych, Grynkovych Orest Stepanovych, Chepkov Igor Borysovych, Gimber Serhii Mykolayovych
Назва патенту російськоюСистемам обнаружения и уничтожения целей
Автори російськоюОлиярник Богдан Алексеевич, Гринькович Орест Степанович, Чепков Игорь Борисович, Гимбер Сергей Николаевич
МПК / Мітки
МПК: F42B 23/00, F41H 11/00, G01S 11/00, F41H 11/12
Мітки: система, цілей, знищення, виявлення
Код посилання
<a href="https://ua.patents.su/6-110311-sistema-dlya-viyavlennya-ta-znishhennya-cilejj.html" target="_blank" rel="follow" title="База патентів України">Система для виявлення та знищення цілей</a>
Система для знищення/ураження повітряних цілей типу безпілотних літальних апаратів
Номер патенту: 60344
Опубліковано: 10.06.2011
Автори: Гладуш Ігор Вікторович, Новіков Сергій Сергійович, Гудима Олег Петрович, Федорук Петро Іванович, Чернозуб Валерій Петрович, Романенко Ігор Олександрович, Мельников Павло Якович, Василенко Олександр Васильович
МПК: F41H 11/02
Мітки: система, типу, апаратів, повітряних, літальних, цілей, безпілотних
Формула / Реферат:
1. Система для знищення/ураження повітряних цілей типу безпілотних літальних апаратів, що містить підсистему розвідки/виявлення та розпізнавання повітряних цілей, центральний командний пункт Сухопутних військ, активні засоби протиповітряної оборони типу ракетних і артилерійських комплексів, включаючи вертольоти армійської авіації, центральний командний пункт Повітряних Сил та активні засоби протиповітряної оборони типу літаків-винищувачів і...
Система знищення/ураження наземних та повітряних цілей типу безпілотних авіаційних комплексів
Номер патенту: 67979
Опубліковано: 12.03.2012
Автори: Архипов Микола Іванович, Гудима Олег Петрович, Башинський Володимир Георгійович, Гусак Юрій Аркадійович, Комаров Володимир Олексадрович, Гладуш Ігор Вікторович, Федорук Петро Іванович, Новіков Сергій Сергійович, Василенко Олександр Васильович, Мельников Павло Якович, Гордієвський Олексій Тихонович, Романенко Ігор Олександрович, Кузнецов Владлен Олександрович
МПК: F41H 11/00, B64C 31/00
Мітки: наземних, безпілотних, повітряних, комплексів, система, цілей, типу, авіаційних
Формула / Реферат:
1. Система знищення/ураження наземних та повітряних цілей типу безпілотних авіаційних комплексів, що містить підсистему розвідки/виявлення та розпізнавання повітряних цілей, центральний командний пункт Сухопутних військ, активні засоби протиповітряної оборони типу ракетних і артилерійських комплексів, включаючи вертольоти армійської авіації, центральний командний пункт Повітряних Сил та активні засоби протиповітряної оборони типу...
Система знищення/ураження повітряних цілей типу безпілотних літальних апаратів
Номер патенту: 99614
Опубліковано: 10.06.2015
Автори: Чернозуб Валерій Петрович, Комаров Володимир Олександрович, Гудима Олег Петрович, Куровська Тетяна Юріївна, Романенко Ігор Олександрович, Мельников Павло Якович
МПК: B64C 31/028, F41H 11/04, F41H 11/02, B64C 31/036
Мітки: типу, літальних, безпілотних, апаратів, цілей, повітряних, система
Формула / Реферат:
1. Система знищення/ураження повітряних цілей типу безпілотних літальних апаратів, що містить підсистему розвідки/виявлення та розпізнавання повітряних цілей, центральний командний пункт Сухопутних військ, активні засоби протиповітряної оборони типу ракетних і артилерійських комплексів, включаючи вертольоти армійської авіації, центральний командний пункт Повітряних Сил та активні засоби протиповітряної оборони типу літаків-винищувачів і...
Система знищення/ураження наземних та повітряних цілей типу безпілотних авіаційних комплексів
Номер патенту: 99633
Опубліковано: 10.06.2015
Автори: Мельников Павло Якович, Чернозуб Валерій Петрович, Куровська Тетяна Юріївна, Романенко Ігор Олександрович, Гудима Олег Петрович, Комаров Володимир Олександрович
МПК: F41H 11/04, F41H 11/02, B64C 31/028, B64C 31/036
Мітки: наземних, цілей, авіаційних, комплексів, типу, повітряних, безпілотних, система
Формула / Реферат:
1. Система знищення/ураження наземних та повітряних цілей типу безпілотних авіаційних комплексів, що містить підсистему розвідки/виявлення та розпізнавання повітряних цілей, центральний командний пункт Сухопутних військ, активні засоби протиповітряної оборони типу ракетних і артилерійських комплексів, включаючи вертольоти армійської авіації, центральний командний пункт Повітряних Сил та активні засоби протиповітряної оборони типу...
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31157
Опубліковано: 25.03.2008
Автори: Мельник Олександр Дмитрович, Ткаченко Володимир Анатолійович, Схабіцький Вадим Романович, Лапицький Сергій Володимирович, Степаненко Юрій Костянтинович, Анпьонов Валентин Вадимович, Сила Ігор Михайлович, Машталір Вадим Віталійович, Кононов Олексій Анатолійович, Гребеник Олександр Миколайович, Парфеня Сергій Григорович, Чіпіжко Юрій Анатолійович, Борохвостов Ігор Валерійович, Гордієвський Олексій Тихонович, Василенко Олександр Васильович, Комаров Володимир Олександрович, Лук'янов Павло Олександрович, Бондарчук Сергій Вікторович, Асланян Альберт Едуардович, Растригін Олександр Олексійович, Чучмій Андрій Володимирович, Галушка Володимир Іванович
МПК: B64C 31/00, H04B 7/185
Мітки: повітряних, допомогою, безпілотних, дистанційно, апаратів, керованих, літальних, спосіб, знищення, цілей
Формула / Реферат:
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів, при якому підготовляють дистанційно керований безпілотний літальний апарат, що містить вбудоване навігаційне устаткування і систему GPS, підготовляють засоби ураження і розгортають пункт керування, установлюють засоби ураження на дистанційно керований безпілотний літальний апарат, проводять зліт дистанційно керованого безпілотного літального...
Попередній патент: Сполуки n-арилтриазолу як антагоністи рецепторів лізофосфатидної кислоти (lpar)
Наступний патент: Спосіб виготовлення бейнітних рейкових сталей, ділянка доріжки кочення і пристрій для здійснення способу
Випадковий патент: Спосіб маскування військових інженерних споруджень від радіолокаційних засобів розвідки