Спосіб безгирьової повірки платформних вагів
Номер патенту: 110349
Опубліковано: 25.12.2015
Автори: Сухінін Віктор Олександрович, Сухінін Андрій Вікторович
Формула / Реферат
1. Спосіб безгирьової повірки платформних вагів за допомогою переносних задатчиків сили й еталонних датчиків, що включає прикладення навантаження на ваги, що повіряються, навантажуючим пристроєм, вимір цього навантаження еталонним датчиком, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, який відрізняється тим, що переносний задатчик сили з механізмом силовведення й еталонний датчик розміщають на вантажоприймальній платформі, а для навантаження вагів використовують вантаж, розташований за межами вантажоприймальної платформи, поза її контуром, масою не менше значення верхньої межі зважування, механізмом силовведення переносного задатчика сили навантажують вантажоприймальну платформу, за допомогою еталонного датчика вимірюють прикладене навантаження, порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання в межах регламентованого методикою повірки циклу навантаження й розвантаження вагів і визначають погрішність зважування.
2. Спосіб безгирьової повірки платформних вагів за п. 1, який відрізняється тим, що контакт механізму силовведення переносного задатчика сил з вантажем, установленим за межами вантажоприймальної платформи, здійснюють через проміжну ланку.
Текст
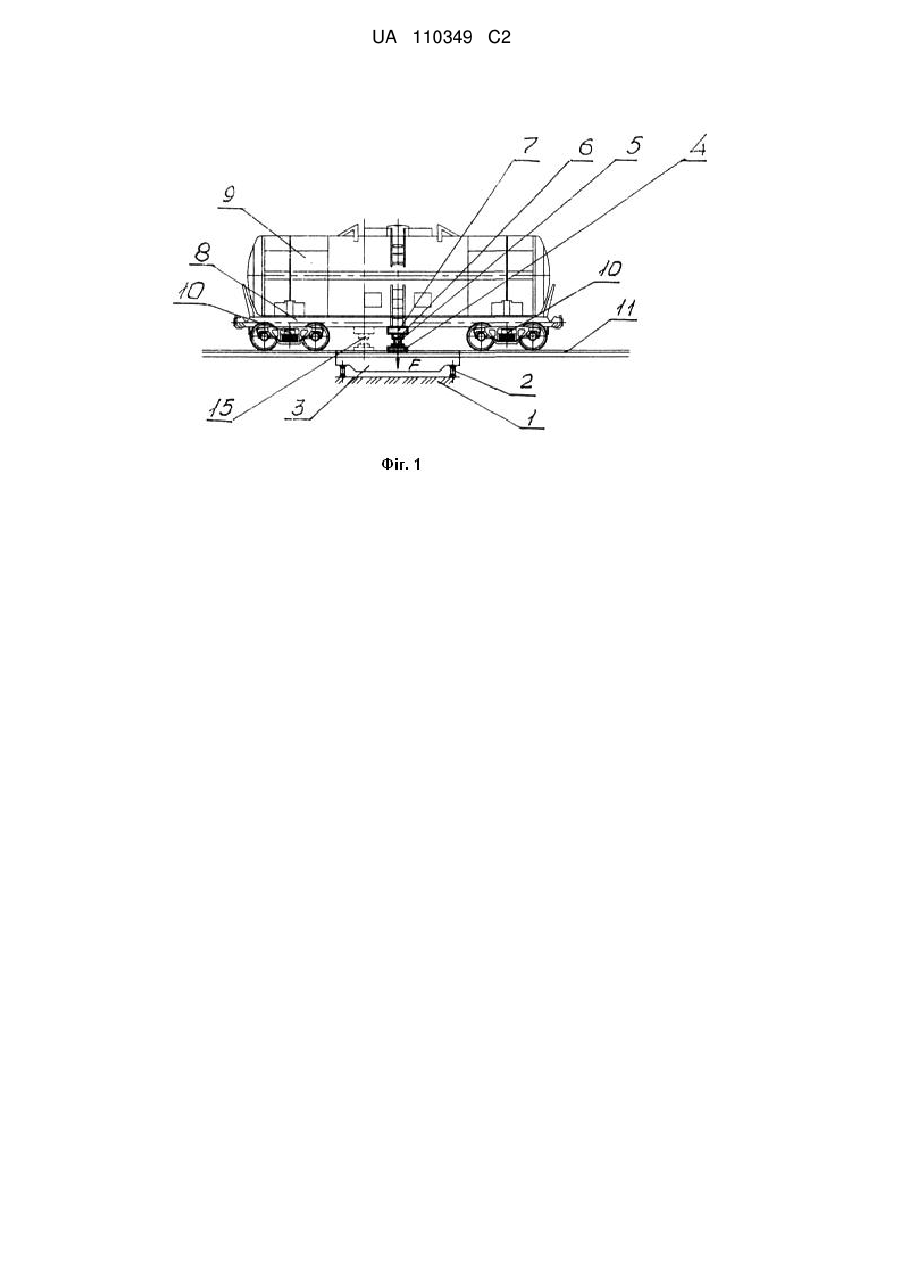
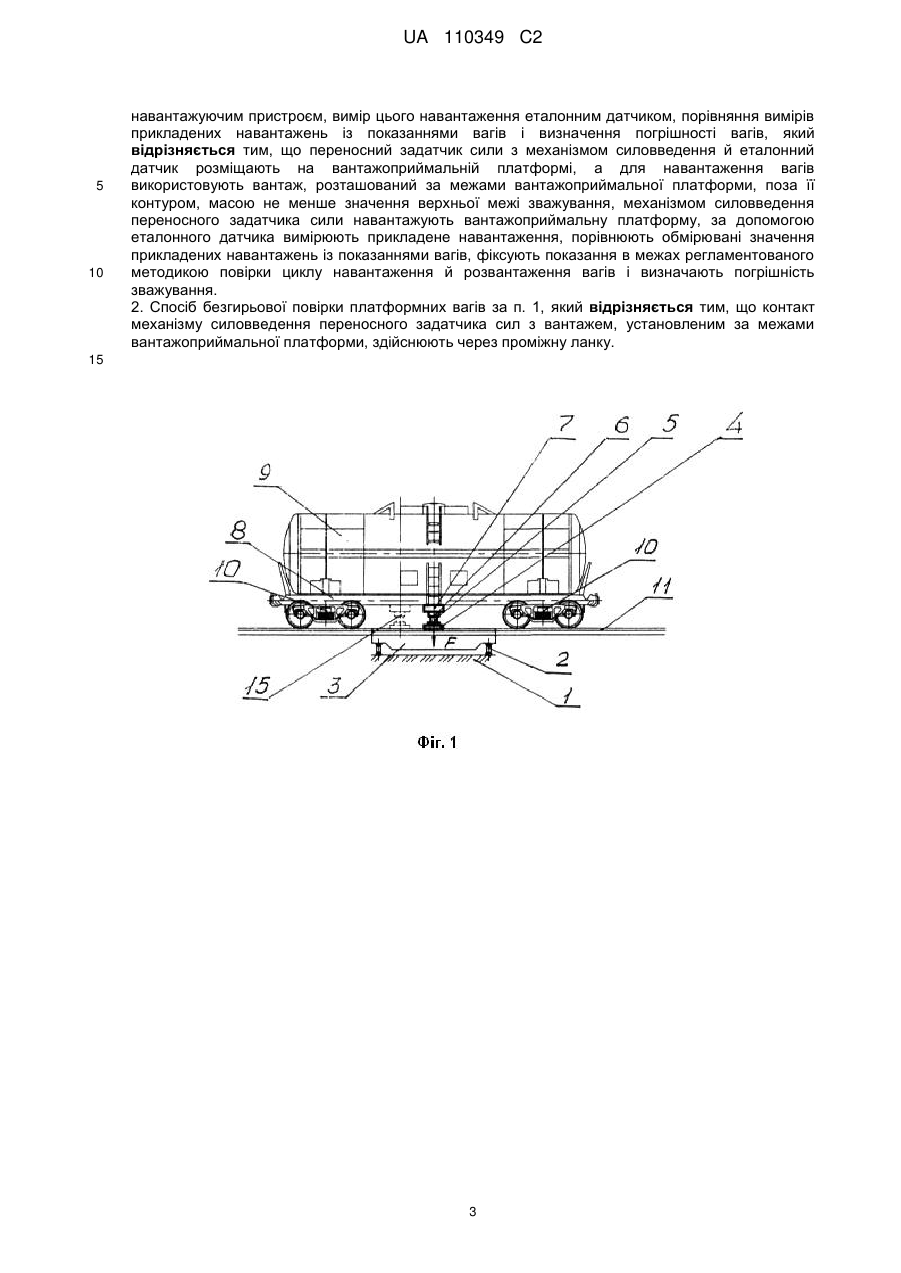
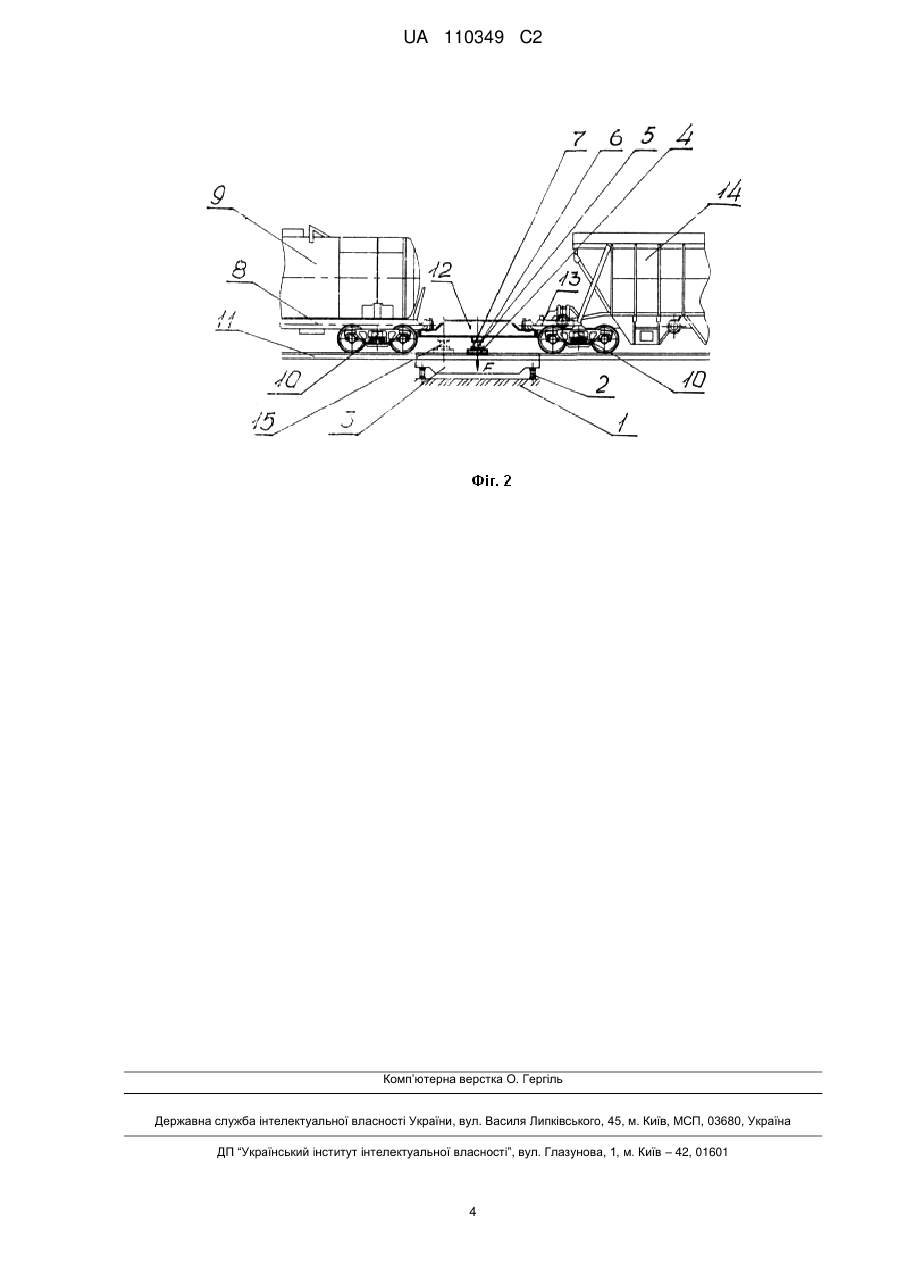
Реферат: Винахід належить до ваговимірювальної техніки й може бути використаний при повірці платформних вагів, переважно вагонних. Спосіб безгирьової повірки вагів, при якому для навантаження вагів використовують вантаж будь-якої маси, але не менше значення верхньої межі зважування, розташований за межами вантажоприймальної платформи, а переносний задатчик сили з механізмом силовведення й еталонним датчиком розташовують на вантажоприймальній платформі. Технічний результат: підвищення точності й надійності безгирьової повірки платформних вагів, зниження її трудомісткості й часу повірки за рахунок розміщення переносного задатчика сили й еталонного датчика на вантажоприймальній платформі, а також використання для навантажування вагів вантажу, розташованого за межами вантажоприймальної платформи, поза її контуром. UA 110349 C2 (12) UA 110349 C2 UA 110349 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до ваговимірювальної і силовимірювальної техніки й може бути використаний при повірці платформних вагів, переважно вагонних. Відомий спосіб безгирьової повірки платформних вагів, відповідно до якого прикладають до вантажоприймальної платформи спрямовані униз по вертикалі відомі навантаження, за допомогою силоввідної ланки переносного задатчика сили, порівнюють номінальні значення прикладених навантажень із показаннями вагів і визначають погрішність вагів (див., наприклад, довідник "Ваги, вагові дозатори, системи зважування і дозування", книга перша під ред. М.П. Нікітінського. – Одеса, 2001. - С. 251-252). Недоліком даного способу є неможливість прикласти силу до кутів вантажоприймальної платформи, що необхідно при юстируванні вагів, цей спосіб не можна використовувати у звичайних вагах без доробки основи. Потрібно мати зачепи для втримання датчика сили. Крім того, цей спосіб прикладення сили є реверсивним, тобто сила стиснення, що прикладається до вантажоприймальної платформи, створюється через силу розтягання, прикладену до основи вагів як до опори, а це приводить до збільшення габаритів пристрою, що реалізує спосіб, і до зниження мобільності. Відомий спосіб безгирьової повірки платформних вагів за допомогою переносного задатчика сили й еталонного датчика, при якому на вантажоприймальній платформі вагів розміщають об'єкт, маса якого дорівнює, наприклад, верхній межі значення заданого діапазону виміру, силоввідну ланку задатчика сили з еталонними датчиками розміщають між вантажоприймальною платформою вагів і основою, прикладають із його допомогою до вантажоприймальної платформи спрямовані по вертикалі навантаження, вимірюють їх за допомогою еталонного датчика, порівнюють вимірювані значення прикладених навантажень із показаннями вагів у всьому діапазоні виміру й визначають погрішність виміру (див. наприклад, спосіб безгирьового навантаження платформних вагів по патенту Росії RU 2419771 МПК G 01G 23/01 - прототип). Недолік такого способу полягає в тому, що для повірки вагів необхідно розміщати на них вантаж, який дорівнює верхній межі заданого діапазону виміру, що пов'язане із транспортуванням вантажу до місця повірки, при цьому протягом транспортування вантажу й повірки - ваги в штатному режимі не працюють, що зв'язано зі значними матеріальними витратами. Розміщення переносного задатчика сили по центрі вантажоприймальної платформи при даному способі повірки ускладнює її підйом, приводить до зниження її характеристик міцності, а також до порушення контакту силоввідних елементів датчиків ваги із вантажоприймальною платформою, порушенню механізму силовведення. Крім того, переміщення переносних задатчиків сили для прикладення зусиль по кутах вантажоприймальної платформи при юстируванні вагів вимагає втручання в конструкцію вантажоприймальної платформи, що в багатьох випадках утруднено за умовами експлуатації, що різко знижує галузь застосування даного способу. Задачею даного винаходу є створення універсального економічного мобільного способу безгирьової повірки платформних вагів, що підвищує точність і надійність виміру, який знижує трудомісткість і енергоємність повірки. В основу винаходу поставлено задачу створення економічного мобільного способу безгирьової повірки платформних вагів, що дозволяє за рахунок розміщення переносного задатчика сили з механізмом силовведення й еталонного датчика на вантажоприймальній платформі, а також використання для навантаження вагів вантажу будь-якої маси не нижче верхньої межі зважування, розташованого за межами вантажоприймальної платформи, поза її контуром, підвищити точність і надійність виміру, одержати можливість створення максимально необхідного навантаження в різних місцях вантажоприймальної платформи при визначенні незалежності показань вагів від положення вантажу на платформі, значно скоротити трудомісткість і час повірки вагів. Поставлена задача вирішується тим, що, відповідно до запропонованого способу безгирьової повірки платформних вагів за допомогою переносних задатчиків сили й еталонних датчиків, що включає прикладення навантаження на ваги, що повіряються, навантажуючим пристроєм, вимір цього навантаження еталонним датчиком, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, - переносний задатчик сили з механізмом силовведення й еталонний датчик розміщають на вантажоприймальній платформі, а для навантаження вагів використовують вантаж, розташований за межами вантажоприймальної платформи, поза її контуром, масою не менше значення верхньої межі зважування, механізмом силовведення переносного задатчика сили навантажують вантажоприймальну платформу, за допомогою еталонного датчика вимірюють прикладене 1 UA 110349 C2 5 10 15 20 25 30 35 40 45 50 55 навантаження, порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання в межах регламентованого методикою повірки циклу навантаження й розвантаження вагів і визначають погрішність зважування, а контакт механізму силовведення переносного задатчика сил з вантажем, установленим за межами вантажоприймальної платформи, здійснюють через проміжну ланку. Технічним результатом способу є підвищення точності й надійності безгирьової повірки платформних вагів, зниження її трудомісткості й часу повірки за рахунок розміщення переносного задатчика сили й еталонного датчика на вантажоприймальній платформі, а також використання для навантаження вагів вантажу, розташованого за межами вантажоприймальної платформи, поза її контуром, масою не нижче верхньої межі зважування. Новизна способу полягає у використанні при повірці вагів вантажу, розташованого за межами вантажоприймальної платформи, поза її контуром, масою не нижче верхньої межі зважування, а також розміщенні переносного задатчика сили з механізмом силовведення й еталонного датчика на вантажоприймальній платформі вагів. Порівняльний аналіз технічного рішення, що заявляється, з іншими, відомими з науковотехнічної й патентної літератури, дозволяє виявити ознаки, які відрізняють рішення, що заявляється, від прототипу, що дає можливість авторам зробити висновок про відповідність ознак, які заявляються, критерію "істотні відмінності", що визначає новизну винаходу. Суть винаходу пояснюється кресленням на прикладі зважування залізничних вагонів, хоча пропонований спосіб придатний для повірки вагів багатьох типів (залізничних, автомобільних, бункерних і т.п.). На фіг. 1 і 2 представлений пристрій, що реалізує спосіб, який заявляється. На основі вагів (фундаменті) 1 (фіг. 1) жорстко встановлені датчики ваги 2, на яких розміщена вантажоприймальна платформа 3, на якій по її центрі розташований переносний задатчик 4 сили з еталонним датчиком 6 і механізмом силовведення із силовимірювальним елементом 7, що контактує з рамою 8 залізничної цистерни 9, візки 10 якої розташовані на рейках 11 за межами вантажоприймальної платформи 3. У тому випадку, коли характеристики міцності рами 8 не відповідають максимальному навантаженню, прикладеному переносним задатчиком 4 сили, силоввідний елемент 7 механізму 6 силовведення контактує із проміжною ланкою - опорною балкою 12, нерухомо, з можливістю від'єднання, пов'язаної з рамою 8 залізничної цистерни 9 і рамою 13 вагона 14 (фіг. 2). У процесі повірки можливе переміщення задатчика 4 сили з еталонним датчиком 5 по вантажоприймальній платформі 3 (позиція 15). Спосіб, що заявляється, реалізується таким чином. Над вагами, що повіряються, над вантажоприймальною платформою 3, за її межами, розміщають вантаж з масою не менше верхньої межі вимірюваного навантаження (найбільшої межі зважування вагів). У цьому випадку це залізнична цистерна 9, візки 10 якої розташовують на рейках 11 за межами вантажоприймальної платформи 3 (фіг. 1). На вантажоприймальну платформу 3, по її центру, встановлюють переносний задатчик 4 сили з еталонним датчиком 5 і механізмом 6 силовведення, включають механізм 6 силовведення й силоввідним елементом 7 впливають на раму 8 залізничної цистерни 9, при цьому на вантажоприймальну платформу 3 впливаєспрямована униз по вертикалі сила F. Переносними задатчиками 4 сили задають значення зусиль, що навантажують вантажоприймальну платформу 3 від нуля до найбільшої межі зважування, потім розвантажують вантажоприймальну платформу 3 від найбільшої межі зважування до нуля, за допомогою еталонного датчика 5 вимірюють прикладене навантаження, порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання в межах регламентованого методикою повірки циклу навантаження й розвантаження вагів і визначають погрішність зважування. Таким чином, пропонований спосіб безгирьової повірки платформних вагів дозволяє підвищити точність і надійність виміру, знизити трудомісткість і енергоємність повірки, значно скоротити час повірки. У теперішній час НВЦ "Измеритель" (м. Одеса) розробляє пристрій для реалізації пропонованого способу безгирьової повірки вагів для залізничного транспорту. ФОРМУЛА ВИНАХОДУ 60 1. Спосіб безгирьової повірки платформних вагів за допомогою переносних задатчиків сили й еталонних датчиків, що включає прикладення навантаження на ваги, що повіряються, 2 UA 110349 C2 5 10 навантажуючим пристроєм, вимір цього навантаження еталонним датчиком, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, який відрізняється тим, що переносний задатчик сили з механізмом силовведення й еталонний датчик розміщають на вантажоприймальній платформі, а для навантаження вагів використовують вантаж, розташований за межами вантажоприймальної платформи, поза її контуром, масою не менше значення верхньої межі зважування, механізмом силовведення переносного задатчика сили навантажують вантажоприймальну платформу, за допомогою еталонного датчика вимірюють прикладене навантаження, порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання в межах регламентованого методикою повірки циклу навантаження й розвантаження вагів і визначають погрішність зважування. 2. Спосіб безгирьової повірки платформних вагів за п. 1, який відрізняється тим, що контакт механізму силовведення переносного задатчика сил з вантажем, установленим за межами вантажоприймальної платформи, здійснюють через проміжну ланку. 15 3 UA 110349 C2 Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSukhinin Viktor Oleksandrovych, Sukhinin Andrii Viktorovych
Автори російськоюСухинин Виктор Александрович, Сухинин Андрей Викторович
МПК / Мітки
МПК: G01G 23/01, G01G 19/02
Мітки: платформних, спосіб, безгирьової, повірки, вагів
Код посилання
<a href="https://ua.patents.su/6-110349-sposib-bezgirovo-povirki-platformnikh-vagiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб безгирьової повірки платформних вагів</a>
Спосіб безгирьової повірки платформних вагів
Номер патенту: 106305
Опубліковано: 11.08.2014
Автор: Дашевський Яків Тевелевич
МПК: G01G 19/00, G01G 23/00
Мітки: спосіб, безгирьової, повірки, платформних, вагів
Формула / Реферат:
Спосіб безгирьової повірки платформних вагів за допомогою переносних механізмів силовведення з задатчиками сили і еталонних датчиків, що включає розміщення над вантажоприймальною платформою вагів об'єкта, що зважують, рівного по масі, наприклад, верхній межі значення заданого діапазону виміру, який відрізняється тим, що об'єкт, що зважують, встановлюють на опори, розміщені поза вантажоприймальною платформою вагів, що повіряють, переносні...
Спосіб безгирьової повірки платформних вагів
Номер патенту: 101789
Опубліковано: 25.04.2013
Автори: Дашевський Яків Тевелевич, Сухінін Віктор Олександрович
МПК: G01G 19/02, G01G 23/00
Мітки: безгирьової, повірки, спосіб, платформних, вагів
Формула / Реферат:
Спосіб безгирьової повірки платформних вагів з основою за допомогою переносних задатчиків сили і еталонних датчиків, що включає розміщення на вантажоприймальній платформі вагів об'єкта, що зважується, рівного по масі, наприклад, найбільшій межі зважування, який відрізняється тим, що переносні задатчики сили з механізмами силовведення й еталонними датчиками розміщають поза основою й вантажоприймальною платформою вагів, що повіряються, а вимір...
Вантажоприймальний пристрій вагів

Номер патенту: 29147
Опубліковано: 16.10.2000
Автори: Калінін Олександр Іванович, Дмитрієв Едуард Модестович
МПК: G01G 19/02
Мітки: пристрій, вантажоприймальний, вагів
Формула / Реферат:
Вантажоприймальний пристрій вагів, який містить вантажоприймальну платформу, розміщений у ній, нерухомо встановлений на фундаменті силовимірювальний датчик, вузол силовведення, який відрізняється тим, що вузол силовведення виконаний у вигляді траверси з вертикально розташованими тягами, при цьому вантажоприймальна платформа через плиту, жорстко закріплену до нижньої частини шарнірне з'єднана за допомого, тяг з траверсою, яка контактує з...
Вантажоприймальний пристрій вагів

Номер патенту: 12804
Опубліковано: 15.03.2006
Автори: Калінін Олександр Олександрович, Калінін Олександр Іванович
МПК: G01G 3/00
Мітки: вантажоприймальний, вагів, пристрій
Формула / Реферат:
Вантажоприймальний пристрій вагів, що містить опорну частину, вантажоприймальну частину, механізм силовведення, виконаний у вигляді шарнірно зв'язаної з опорною і вантажоприймальною частинами підвіски, оснащеної верхнім і нижнім вузлами силовведення з убудованим між ними силовимірювальним тензодатчиком, який відрізняється тим, що верхній вузол силовведення підвіски виконаний у вигляді циліндричної обойми, нижня частина внутрішньої поверхні...
Вантажоприймальний пристрій вагів

Номер патенту: 12797
Опубліковано: 15.03.2006
Автори: Калінін Олександр Іванович, Калінін Олександр Олександрович
МПК: G01G 23/00, G01G 21/00
Мітки: вантажоприймальний, пристрій, вагів
Формула / Реферат:
Вантажоприймальний пристрій вагів, що містить опорну частину, вантажоприймальну частину, нерухомо встановлений на опорній частині силовимірювальний тензодатчик балкового типу, що зв'язує силовимірювальний тензодатчик із вантажоприймальною частиною вагів, вузол силовведення, що містить виконані з еластичного матеріалу елементи, який відрізняється тим, що вузол силовведення виконаний у вигляді верхньої циліндричної обойми, жорстко зв'язаної...
Попередній патент: Плівковий елемент
Наступний патент: Ортез на гомілковостопний суглоб і стопу
Випадковий патент: Пристрій для розподілення потоку виробів циліндричної форми