Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс
Номер патенту: 114044
Опубліковано: 27.02.2017
Автори: Чаплигіна Олександра Михайлівна, Шевченко Валерій Олександрович
Формула / Реферат
Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс, що містить гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра, яка відрізняється тим, що на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силового гідроциліндра нахилу коліс передньої осі, що створює протидію величині дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії.
Текст
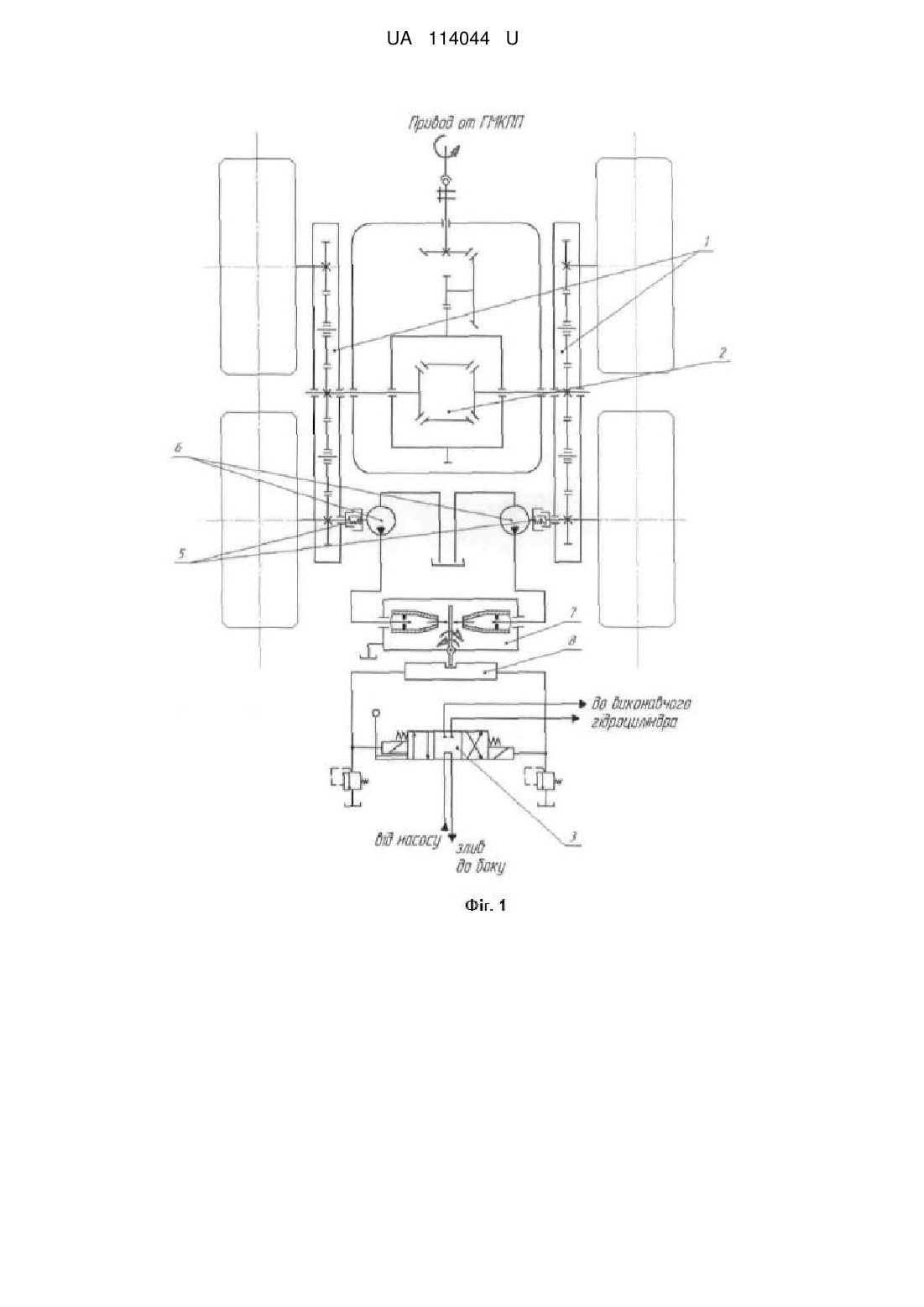
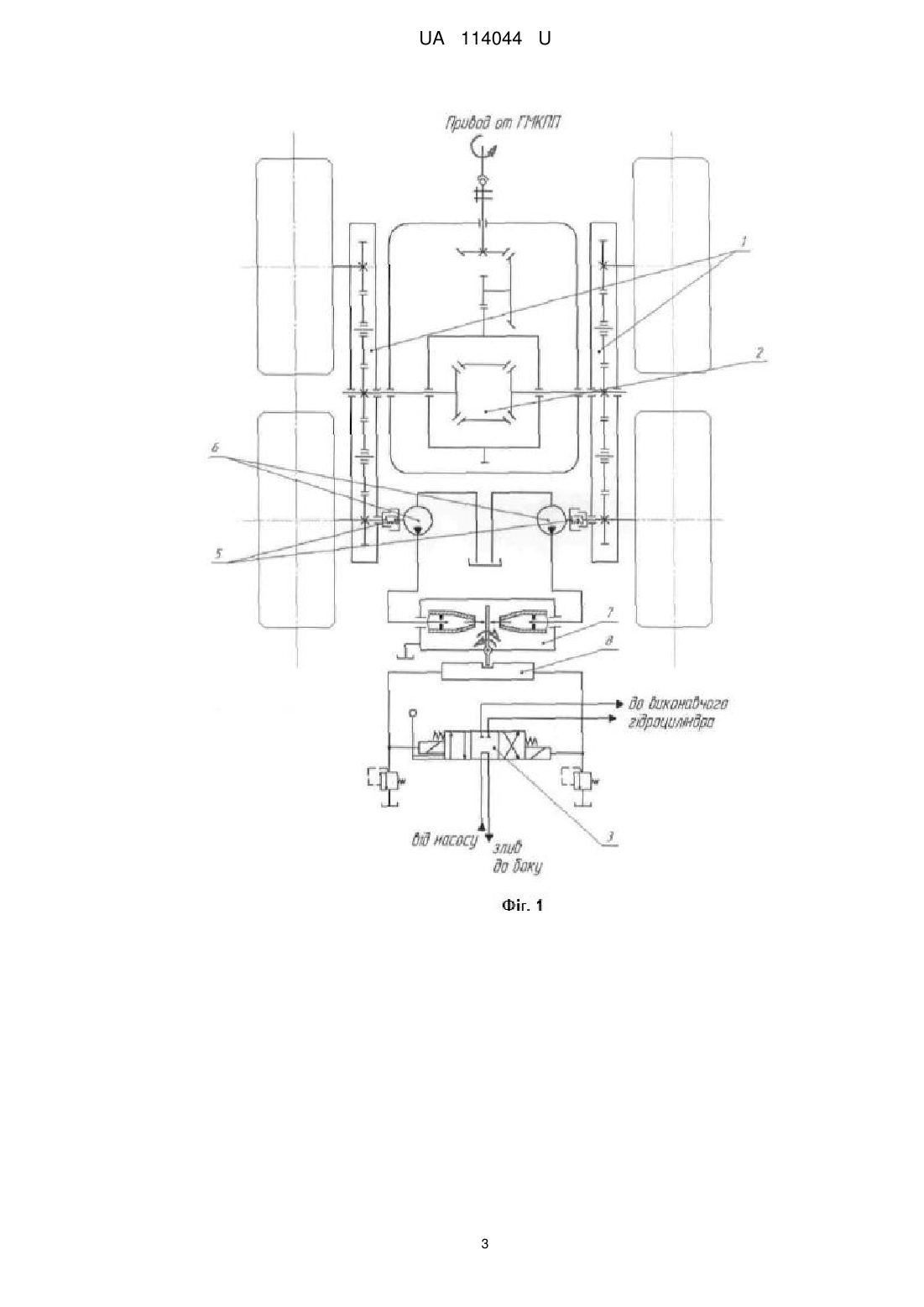
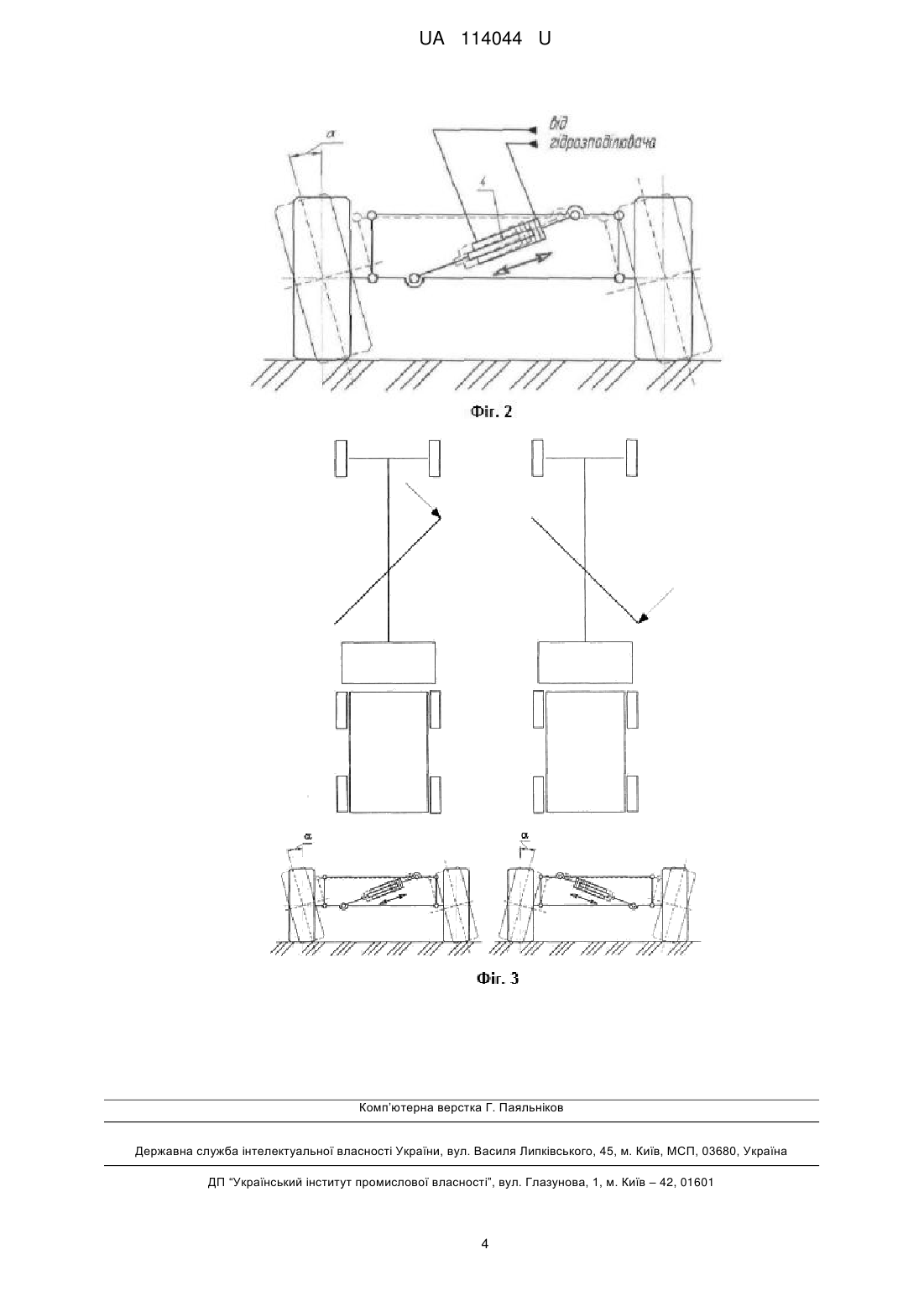
Реферат: Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс містить гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра. На балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силового гідроциліндра нахилу коліс передньої осі. UA 114044 U (12) UA 114044 U UA 114044 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, зокрема до гідравлічної системи автогрейдера, і може бути використана для стабілізації траєкторії руху землерийнотранспортних машин (ЗТМ). Найбільш близькою до запропонованої корисної моделі за принципом та суттю є гідросистема мобільної машини [Пат. 2158861 Российская федерация, МПК F16Н 39/02. Гидросистема мобильной машины / Мельников А.В.; заявитель и патентообладатель ОАО "Специальное конструкторское бюро приборостроения и автоматики". - № 98111405/28; заявл. 15.06.98; опубл. 10.11.2000], яка передбачає встановлення до гідравлічної системи мобільної машини додаткового пропорційного золотникового клапана з електроуправлінням, датчика положення люльки насоса, датчика тиску в робочій порожнині насоса, пристрою управління пропорційним золотниковим клапаном, причому входи пропорційного золотникового клапана і датчика тиску з'єднані з магістраллю, яка підключається до поршневої порожнини кожного виконавчого механізму гідросистеми, а вихід пропорційного золотникового клапана - зі зливом, входи пристрою управління з'єднані з виходами датчика тиску і датчика положення люльки насоса, а вихід - з керуючим входом пропорційного золотникового клапана. До недоліків розглянутої гідравлічної системи належить її функціональна обмеженість і складність конструкції. Управління швидкістю виконавчого механізму проводиться релейно, за рахунок підключення до силових магістралей допоміжного насоса. Дана система не дозволяє здійснювати плавну зміну швидкості і напряму обертання виконавчого механізму. Корисна модель направлена на розширення функціональних можливостей гідросистеми мобільної машини і зниження її енерговитрат, але не дозволяє стабілізувати траєкторію руху машини. В основу корисної моделі поставлено задачу вдосконалити гідравлічну систему машини таким чином, щоб дійсна траєкторія руху машини не відхилялася від запланованої, за допомогою системи управління ходовим обладнанням, а саме нахилу коліс передньої осі у вертикальній площині, створюючи додаткове зусилля, яке дозволяє підвищити поперечну стійкість руху машини. Поставлена задача вирішується тим, що при створенні додаткового зусилля формується протидія дестабілізуючому моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. На фіг. 1-2 зображена схема запропонованої корисної моделі, що включає в себе трансмісію, яка складається з двох бортових редукторів 1, головної передачі з диференціалом 2, гідромеханічної коробки перемикання передач (ГМКПП), а також гідравлічної системи керування робочим обладнанням, яка складається з насоса, розподільника 3, виконавчого гідроциліндра 4 (фіг. 2). Для стабілізації траєкторії руху автогрейдера, на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти 5 з електричним управлінням з кабіни, два гідронасоси 6, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка 7. Зміщення заслінки фіксується електромеханічним перетворювачем 8 і перетворюється в керуючий сигнал, направлений до гідророзподільника 3 з електричним управлінням. Для коригування траєкторії руху вихідні магістралі гідророзподільника 3 з'єднані з виконавчими порожнинами силового гідроциліндра 4 механізму нахилу коліс передньої осі у вертикальній площин (фіг. 2). Нахил коліс на кут α призводить до зменшення площини контакту колеса з ґрунтом, що збільшує тиск в зоні контакту колеса з ґрунтом. За рахунок деформації опорної поверхні при зміщенні передніх коліс у бік, додатково до сил тертя виникають зусилля різання ґрунту самим колесом, що призводить до збільшення утримуючого моменту в горизонтальній площині. Крім того, під час нахилу коліс, за рахунок асиметричного зміщення центру обертання колеса відносно центру опорної поверхні, виникає додатковий момент уводу у бік наклону коліс в горизонтальній площині на передній осі. Нахил коліс переднього мосту в вертикальній площині повинен коригуватись в залежності від напряму головного вектора сил опору на відвалі, а кут нахилу залежить від значення дестабілізуючого моменту, який виникає завдяки дії сил опору (фіг. 3). Система стабілізації траєкторії руху автогрейдера працює наступним чином. Під час руху автогрейдера в процесі розробки робочого середовища виникає явище буксування лівого чи правого борту, яке обумовлено позацентрово прикладеними силами, що виникають під час розробки середовища. Ці сили викликають дію дестабілізуючих моментів в горизонтальній та вертикальній площині, які сприяють мимовільному розвороту машини. Щоб зменшити величину дестабілізуючих моментів і вирівняти співвідношення опорних реакцій по бортах змінюється конструкція колісних півосей. Встановлено додаткові муфти 5 з електроуправлінням, які включаються оператором під час розробки середовища і виключаються під час транспортного руху машини, два насоси 6, напірні магістралі яких під'єднано до пристрою типу сопло-заслінка 7. Зміщення заслінки фіксується електромеханічним перетворювачем 8 і перетворюється в 1 UA 114044 U 5 10 15 20 25 керуючий сигнал, направлений до гідророзподільника 3, який має ручне та гідравлічне управління. Система регулюється оператором з кабіни. Оператор включає систему в процесі розробки середовища, коли гідроциліндри знаходяться в нейтральному стані. У процесі роботи за рахунок дії дестабілізуючих моментів з боку розроблюваного середовища відбувається перерозподіл опорних реакцій, що призводить до зміни швидкості обертання коліс лівого та правого борту. Відповідно подача рідини від гідронасосів 6 буде різною, що призведе до зміщення заслінки та генерації керуючого сигналу електромеханічним перетворювачем 8. Отриманий керуючий сигнал призведе до перемикання розподільника 3 і подачі рідини до робочої порожнини виконавчого гідроциліндра 4. Гідроциліндр 4 змінює нахил колісного обладнання на кут α, що створює протидію дестабілізуючому моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. Розроблена корисна модель може бути використана для стабілізації руху автогрейдера під час виконання робочих операцій а також для ЗТМ, які мають подібне ходове обладнання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс, що містить гідравлічну систему управління ходовим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра, яка відрізняється тим, що на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами пристрою типу сопло-заслінка, з пристрою сигнал подається через електромеханічний перетворювач до гідророзподільника, для коригування траєкторії руху автогрейдера, вихідні магістралі гідророзподільника з'єднані з виконавчими порожнинами силового гідроциліндра нахилу коліс передньої осі, що створює протидію величині дестабілізуючого моменту в горизонтальній площині, що дозволяє утримати машину на запланованій траєкторії. 2 UA 114044 U 3 UA 114044 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 39/00, F16H 43/00
Мітки: допомогою, коригування, нахилу, траєкторії, автогрейдера, коліс, руху, стабілізації, система
Код посилання
<a href="https://ua.patents.su/6-114044-sistema-stabilizaci-traehktori-rukhu-avtogrejjdera-za-dopomogoyu-koriguvannya-nakhilu-kolis.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації траєкторії руху автогрейдера за допомогою коригування нахилу коліс</a>
Система стабілізації траєкторії руху автогрейдера
Номер патенту: 114013
Опубліковано: 27.02.2017
Автори: Чаплигіна Олександра Михайлівна, Шевченко Валерій Олександрович
МПК: F16H 39/00, F16H 43/00
Мітки: автогрейдера, стабілізації, траєкторії, руху, система
Формула / Реферат:
Система стабілізації траєкторії руху автогрейдера, що представляє гідравлічну систему управління робочим обладнанням, що складається з насоса, розподільника, виконавчого гідроциліндра, яка відрізняється тим, що з метою стабілізації траєкторії руху автогрейдера на балансирних редукторах встановлені вихідні вали, з якими зістиковано дві фрикційні муфти з електричним управлінням, два гідронасоси, вихідні патрубки яких з'єднані з порожнинами...
Спосіб одержання електричної енергії за допомогою обертового руху коліс автодорожніх транспортних засобів
Номер патенту: 71868
Опубліковано: 25.07.2012
Автори: Дрьомов Олег Сергійович, Дрьомов Сергій Тимофійович
МПК: F03D 9/02
Мітки: допомогою, електричної, транспортних, руху, коліс, обертового, спосіб, одержання, енергії, автодорожніх, засобів
Формула / Реферат:
1. Спосіб одержання електричної енергії за допомогою обертового руху коліс автодорожніх транспортних засобів, при посередництві зворотного обертового руху внутрішнього повітряного або газового їх середовища, який відрізняється тим, що зворотний обертовий рух внутрішнього повітряного або газового середовища формують за допомогою допоміжного колеса, зовнішній діаметр якого співпадає з внутрішнім діаметром основного колеса для зручності його...
Пристрій для стабілізації руху причіпної машини
Номер патенту: 69692
Опубліковано: 10.05.2012
Автори: Бабич Леонід Олексійович, Шебанов Володимир Олександрович
МПК: A01B 59/00
Мітки: руху, причіпної, пристрій, стабілізації, машини
Формула / Реферат:
Пристрій для стабілізації руху причіпної машини, який має закріплену на рамі причіпної машини П-подібну рамку, розміщений в ній дисковий ніж, гідроциліндр з гідророзподільником, який відрізняється тим, що дисковий ніж встановлений з можливістю обертання в щоках, які оснащені пристроями для відводу рослинності від дискового ножа, очистки його від ґрунту, який налипає, та з'єднаний з допоміжною рамкою, закріпленою в П-подібній рамці за...
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Пхайко Ірина Вікторівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутового, система, стабілізації, руху, апарата, космічного
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Пристрій для керування робочим обладнанням автогрейдера
Номер патенту: 104145
Опубліковано: 12.01.2016
Автори: Фатєєв Руслан Вікторович, Шевченко Валерій Олександрович, Рагулін Віталій Миколайович
Мітки: робочим, пристрій, обладнанням, керування, автогрейдера
Формула / Реферат:
Пристрій для керування робочим обладнанням автогрейдера, що містить гідроциліндри підйому-опускання робочого устаткування, гідроциліндр винесення робочого устаткування убік, допоміжний гідроциліндр, кронштейни кріплення гідроциліндрів, який відрізняється тим, що пристрій розташований на тяговій рамі, забезпечений повзуном, на якому закріплені гідроциліндри винесення тягової рами убік, і додатковим гідроциліндром для забезпечення зміни...
Попередній патент: Склад для температурно-вогнезахисного покриття
Наступний патент: Газова система живлення двигуна автомобіля
Випадковий патент: Підвіконна дошка