Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Пхайко Ірина Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
Формула / Реферат
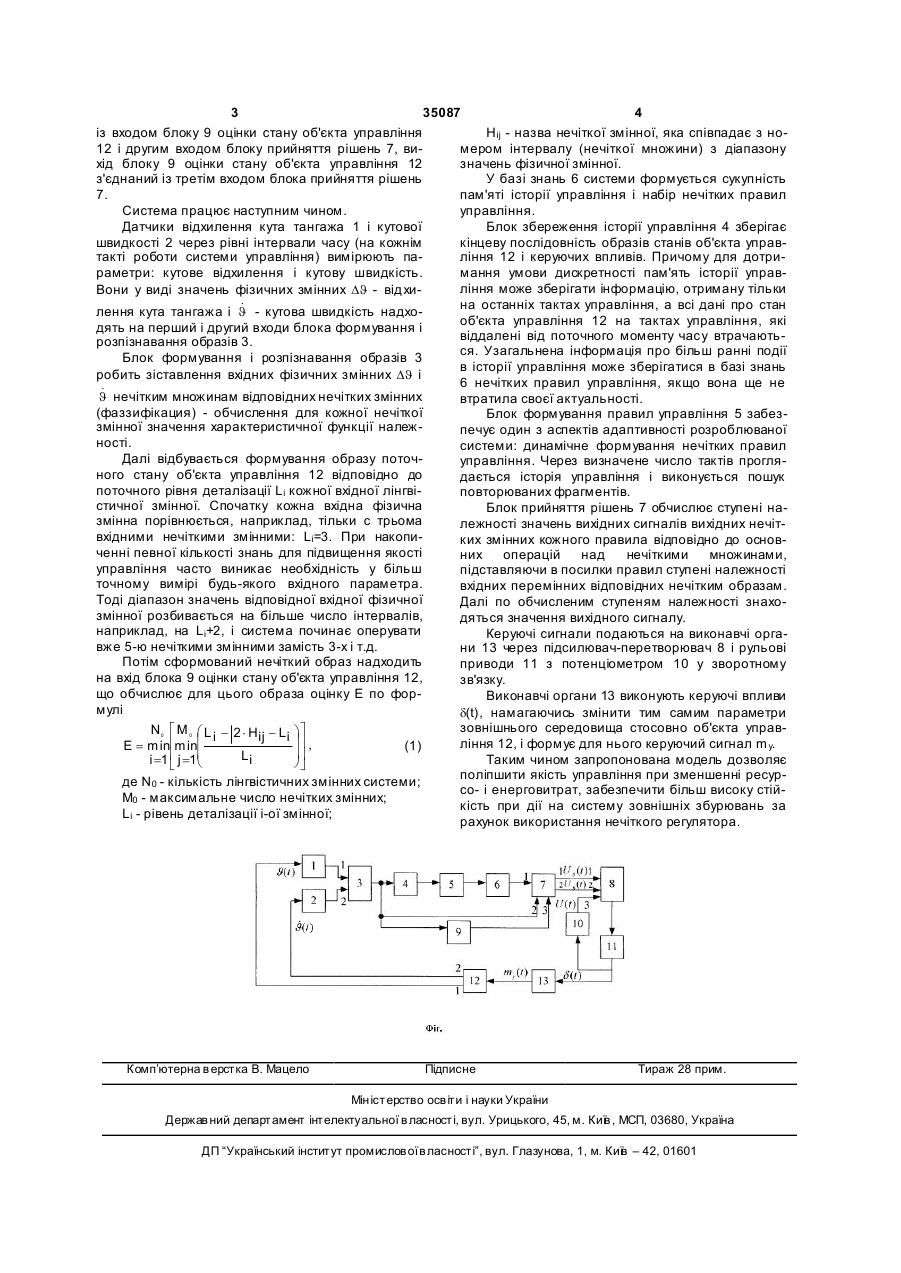
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута тангажа і кутової швидкості, а вихід блока формування і розпізнавання образів послідовно через блок збереження історії керування, блок формування правил керування, базу знань, блок прийняття рішень підключений до підсилювача-перетворювача, а також вихід блока формування і розпізнавання образів з'єднаний з входом блока прийняття рішень, блока оцінки стану об'єкта керування, вхід якого з'єднаний з виходом блока формування і розпізнавання образів, а вихід з'єднаний із блоком прийняття рішень.
Текст
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному 3 35087 4 із входом блоку 9 оцінки стану об'єкта управління Hij - назва нечіткої змінної, яка співпадає з но12 і другим входом блоку прийняття рішень 7, вимером інтервалу (нечіткої множини) з діапазону хід блоку 9 оцінки стану об'єкта управління 12 значень фізичної змінної. з'єднаний із третім входом блока прийняття рішень У базі знань 6 системи формується сукупність 7. пам'яті історії управління і набір нечітких правил Система працює наступним чином. управління. Датчики відхилення кута тангажа 1 і кутової Блок збереження історії управління 4 зберігає швидкості 2 через рівні інтервали часу (на кожнім кінцеву послідовність образів станів об'єкта управтакті роботи системи управління) вимірюють паління 12 і керуючих впливів. Причому для дотрираметри: кутове відхилення і кутову швидкість. мання умови дискретності пам'ять історії управління може зберігати інформацію, отриману тільки Вони у виді значень фізичних змінних DJ - відхина останніх тактах управління, а всі дані про стан & - кутова швидкість надхолення кута тангажа і J об'єкта управління 12 на тактах управління, які дять на перший і другий входи блока формування і віддалені від поточного моменту часу втрачаютьрозпізнавання образів 3. ся. Узагальнена інформація про більш ранні події Блок формування і розпізнавання образів 3 в історії управління може зберігатися в базі знань робить зіставлення вхідних фізичних змінних DJ і 6 нечітких правил управління, якщо вона ще не & J нечітким множинам відповідних нечітких змінних втратила своєї актуальності. (фаззифікация) - обчислення для кожної нечіткої Блок формування правил управління 5 забеззмінної значення характеристичної функції належпечує один з аспектів адаптивності розроблюваної ності. системи: динамічне формування нечітких правил Далі відбувається формування образу поточуправління. Через визначене число тактів прогляного стану об'єкта управління 12 відповідно до дається історія управління і виконується пошук поточного рівня деталізації Lі кожної вхідної лінгвіповторюваних фрагментів. стичної змінної. Спочатку кожна вхідна фізична Блок прийняття рішень 7 обчислює ступені назмінна порівнюється, наприклад, тільки с трьома лежності значень вихідних сигналів вихідних нечітвхідними нечіткими змінними: Lі=3. При накопиких змінних кожного правила відповідно до основченні певної кількості знань для підвищення якості них операцій над нечіткими множинами, управління часто виникає необхідність у більш підставляючи в посилки правил ступені належності точному вимірі будь-якого вхідного параметра. вхідних перемінних відповідних нечітким образам. Тоді діапазон значень відповідної вхідної фізичної Далі по обчисленим ступеням належності знахозмінної розбивається на більше число інтервалів, дяться значення вихідного сигналу. наприклад, на Li+2, і система починає оперувати Керуючі сигнали подаються на виконавчі оргавже 5-ю нечіткими змінними замість 3-х і т.д. ни 13 через підсилювач-перетворювач 8 і рульові Потім сформований нечіткий образ надходить приводи 11 з потенціометром 10 у зворотному на вхід блока 9 оцінки стану об'єкта управління 12, зв'язку. що обчислює для цього образа оцінку Е по форВиконавчі органи 13 виконують керуючі впливи мулі d(t), намагаючись змінити тим самим параметри зовнішнього середовища стосовно об'єкта управN0 é M 0 æ L - 2 × H - L öù i ij i ÷ú ління 12, і формує для нього керуючий сигнал m у. , E = minêminç (1) ÷ú Li i = 1 ê j = 1ç Таким чином запропонована модель дозволяє è øû ë поліпшити якість управління при зменшенні ресурде N0 - кількість лінгвістичних змінних системи; со- і енерговитрат, забезпечити більш високу стійМ0 - максимальне число нечітких змінних; кість при дії на систему зовнішніх збурювань за Li - рівень деталізації і-ої змінної; рахунок використання нечіткого регулятора. Комп’ютерна в ерстка В. Мацело Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStabilization system of angular motion of spacecraft
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Pkhaiko Iryna Viktorivna
Назва патенту російськоюСистема стабилизации углового движения космического аппарата
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Пхайко Ирина Викторовна
МПК / Мітки
МПК: B64G 1/24
Мітки: система, руху, космічного, апарата, стабілізації, кутового
Код посилання
<a href="https://ua.patents.su/2-35087-sistema-stabilizaci-kutovogo-rukhu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації кутового руху космічного апарата</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Антошик Вікторія Миколаївна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: літального, апарата, безпілотного, система, стабілізації
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Номер патенту: 26286
Опубліковано: 19.07.1999
Автор: Кашматов Віктор Йосипович
МПК: B64C 13/00
Мітки: руху, стабілізації, літального, апарата, аржесан, система, керування, величини, ручного, пульт, спосіб, регульованої
Формула / Реферат:
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Величко Надія Вікторівна
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, літального, система, безпілотного, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Спосіб стабілізації кутового руху літальнього апарату

Номер патенту: 16950
Опубліковано: 29.08.1997
Автори: Натушкін Володимир Федорович, Дронь Микола Михайлович
МПК: B64C 13/00
Мітки: літального, кутового, спосіб, руху, стабілізації, апарату
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: демпфірування, літального, швидкостей, кутових, система, космічного, апарата
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Попередній патент: Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Наступний патент: Відмовостійка система керування боковим рухом безпілотного літального апарата
Випадковий патент: Спосіб виробництва цементно-волокнистих виробів шляхом пресування сухої суміші складених компонентів і подальшого капілярного зволоження