Транспортний засіб
Номер патенту: 116443
Опубліковано: 25.05.2017
Автори: Войтенко Володимир Андрієвич, Водічєв Володимир Анатольович, Гладченко Володимир Олександрович



Формула / Реферат
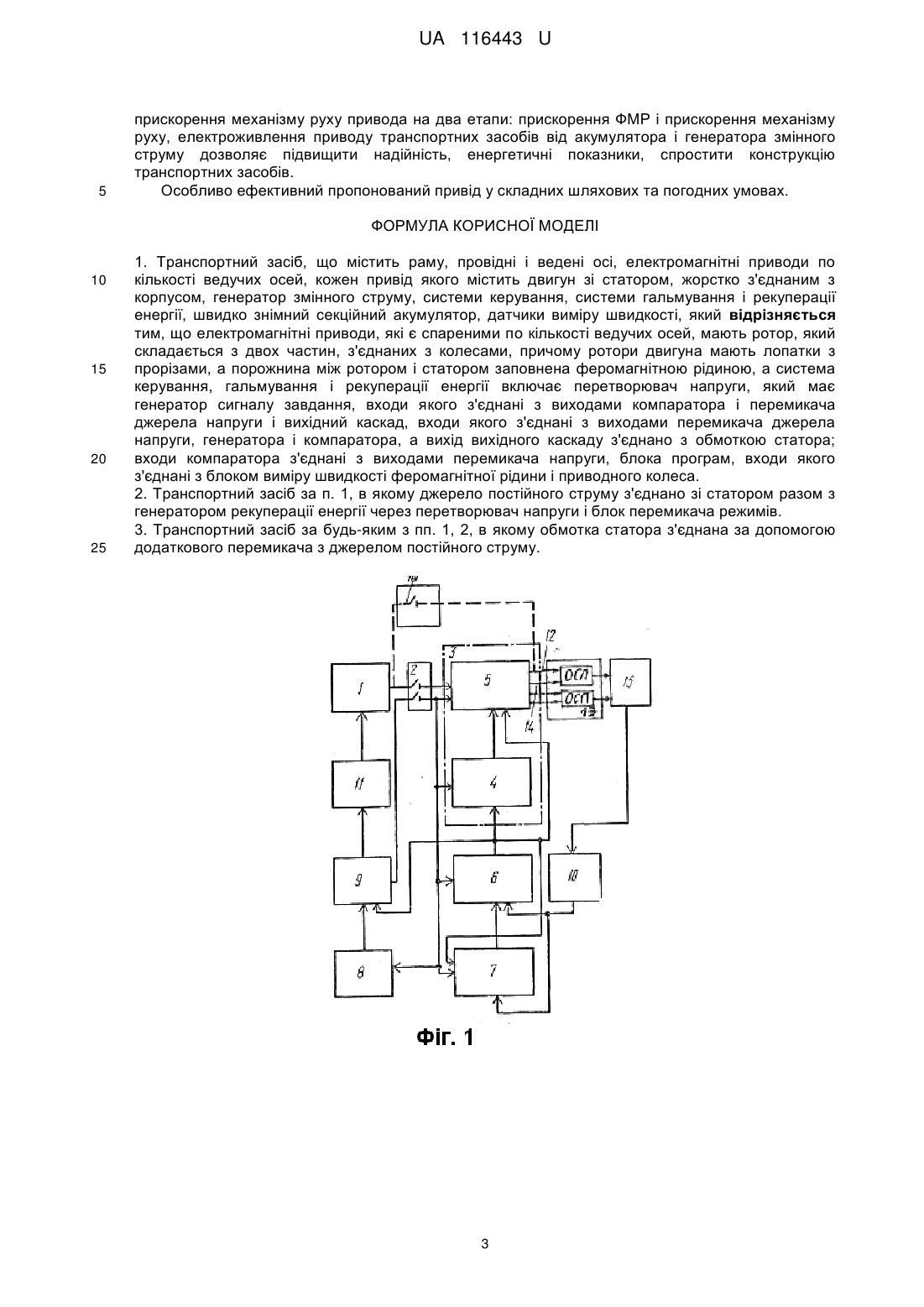
1. Транспортний засіб, що містить раму, провідні і ведені осі, електромагнітні приводи по кількості ведучих осей, кожен привід якого містить двигун зі статором, жорстко з'єднаним з корпусом, генератор змінного струму, системи керування, системи гальмування і рекуперації енергії, швидко знімний секційний акумулятор, датчики виміру швидкості, який відрізняється тим, що електромагнітні приводи, які є спареними по кількості ведучих осей, мають ротор, який складається з двох частин, з'єднаних з колесами, причому ротори двигуна мають лопатки з прорізами, а порожнина між ротором і статором заповнена феромагнітною рідиною, а система керування, гальмування і рекуперації енергії включає перетворювач напруги, який має генератор сигналу завдання, входи якого з'єднані з виходами компаратора і перемикача джерела напруги і вихідний каскад, входи якого з'єднані з виходами перемикача джерела напруги, генератора і компаратора, а вихід вихідного каскаду з'єднано з обмоткою статора; входи компаратора з'єднані з виходами перемикача напруги, блока програм, входи якого з'єднані з блоком виміру швидкості феромагнітної рідини і приводного колеса.
2. Транспортний засіб за п.1, в якому джерело постійного струму з'єднано зі статором разом з генератором рекуперації енергії через перетворювач напруги і блок перемикача режимів. 3.Транспортний засіб за будь-яким з пп.1, 2, в якому обмотка статора з'єднана за допомогою додаткового перемикача з джерелом постійного струму.
Текст
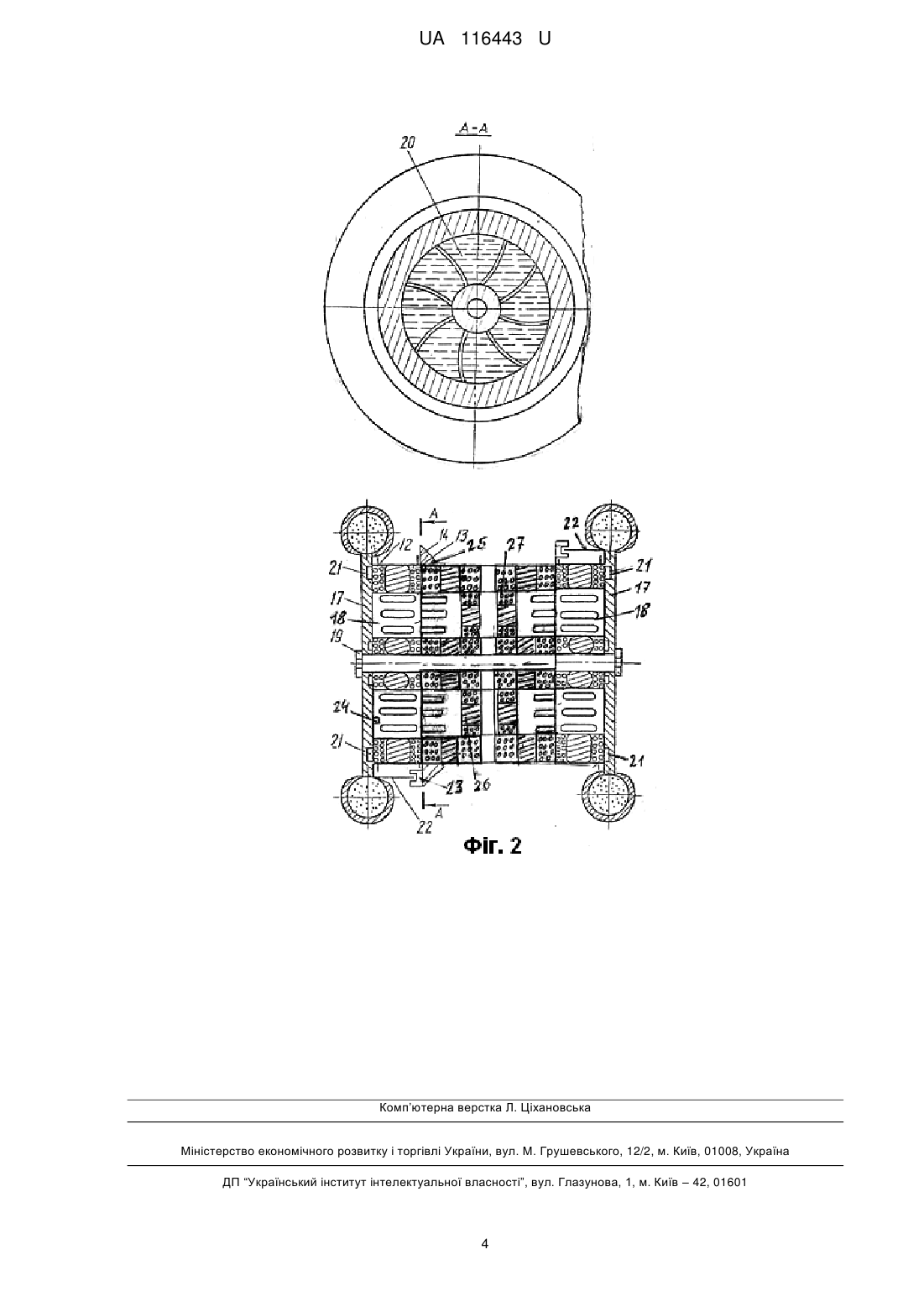
Реферат: Транспортний засіб, що містить раму, провідні і ведені осі, електромагнітні приводи по кількості ведучих осей, кожен привід якого містить двигун зі статором, жорстко з'єднаним з корпусом, генератор змінного струму, системи керування, системи гальмування і рекуперації енергії, швидко знімний секційний акумулятор, датчики виміру швидкості, причому електромагнітні приводи, які є спареними по кількості ведучих осей, мають ротор, який складається з двох частий, з'єднаних з колесами, причому ротори двигуна мають лопатки з прорізами, а порожнина між ротором і статором заповнена феромагнітною рідиною, а система керування, гальмування і рекуперації енергії включає перетворювач напруги, який має генератор сигналу завдання, входи якого з'єднані з виходами компаратора і перемикача джерела напруги, і вихідний каскад, входи якого з'єднані з виходами перемикача джерела напруги, генератора і компаратора, а вихід вихідного каскаду з'єднано з обмоткою статора; входи компаратора з'єднані з виходами перемикача напруги, блока програм, входи якого з'єднані з блоком виміру швидкості феромагнітної рідини і приводного колеса. UA 116443 U (12) UA 116443 U UA 116443 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі електроприводу, зокрема до пристроїв електромобіля. Аналогом є мотор-колеса транспортних засобів, наприклад винахід України №5048844, В60К 7/00, 1992р., що містить установлені на осі електродвигуни, з'єднані з редуктором, зубчате колесо, яке установлено на вихідному валу і яке знаходиться в зачепленні зі змонтованим в ободі ланцюговим колесом внутрішнього зачеплення (1). Недоліки: складність конструкції, великі матеріалоємність, енерговитрати, складність регулювання. Це пов'язано з наявністю у аналога редуктора, зубчатого колеса, яке знаходиться в зачепленні з ланцюговим колесом. Спрощення конструкції, зменшення матеріалоємності досягається шляхом заміни двох моторколіс одним спареним двигуном, в якому функції передачі руху взамін редукторів, зубчатих коліс, ланцюгових коліс виконують ротори двигуна з лопатками, а порожнина між ротором і статором заповнена феромагнітною рідиною (ФМР). Прототипом є винахід України №59167, B60L11, 2011р., що містить ходову частину з ведучими редукторами, механічне керування; акумуляторна батарея виконана швидкозмінною. Прототип має наступні недоліки: складність конструкції, складність регулювання, великі енерговитрати. Спрощення конструкції досягається шляхом заміни ходової частини з ведучими редукторами одним спареним двигуном. Спрощення регулювання і зниження енерговитрат в запропонованому транспортному засобі досягається заміною електромеханічних перемикачів блоком керування з автоматичним вибором частоти обігу ФМР і лопаті ротора, розподілом процесу прискорення механізму руху на два етапи: прискорення руху ФМР і прискорення транспортного засобу, електроживленням приводу від акумулятора і генератора змінного струму з взаємним підживленням. Задача спрощення конструкції, покращення економічних та енергетичних показників. Поставлена задача вирішується тим, що: 1. Ротор двигуна складається з двох частин, з'єднаних з колесами, вони мають лопаті з прорізами, а порожнина між ротором і статором заповнена феромагнітною рідиною, електромагнітні приводи є спареними по кількості ведучих осей, система керування, гальмування і рекуперації енергії включає перетворювач напруги, яка задається генератором, входи якого з'єднані з виходами компаратора і перемикача джерела напруги, вихідний каскад, входи якого з'єднано з виходами перемикача джерела напруги, яка задається генератором і компаратором, а вихід з'єднано з обмоткою статора; входи компаратора з'єднано з виходами перемикача напруги блока програм, входи якого з'єднано з блоком виміру швидкості феромагнітної рідини і приводного колеса. 2. Джерело постійного струму з'єднано з обмоткою статора разом з генератором рекуперації енергії через перетворювач напруги і блок перемикача режимів. 3.Обмотка статора з'єднана за допомогою додаткового перемикача з джерелом постійного струму. Запропонована корисна модель наведено схематично на фіг. 1 і 2. Вихід джерела енергії постійного струму 1 з'єднано з входом перемикача 2, виходи якого з'єднані з входами перетворювача напруги 3 (блоками генератора 4 і вихідного каскаду 5), компаратора 6, блока програм 7, генератора змінного струму 8. Два інших входи вихідного каскаду 5 з'єднані з виходом генератора 4 і з виходом компаратора 6, який також з'єднано з входами генератора 4, блока програм 7 і блока перемикача режимів 9. Вихід блока програм 7 з'єднано з другим входом компаратора 6, а треті входи блоків 6 і 7 з'єднані з виходом блока виміру швидкості ФМР і приводного колеса 10. Вихід блока 8 з'єднано з другим входом блока 9, виходи якого з'єднані з перемикачем напруги 2 і випрямлячем 11, вихід якого з'єднано з джерелом напруги постійного струму 1. Вихід 12 перетворювача напруги з'єднано з обмоткою статора 13, другий кінець якої з'єднано з другим виходом 14 блока 3. Магнітне поле статора 13 впливає на вузол магнітномеханічного зв'язку 15, який представлено на фіг. 2. Вхід блока 10 з'єднано з датчиком швидкості, який входить в вузол 15. Додатковий перемикач 16 з'єднує джерело постійного струму 1 з входом обмотки статора 12. Вузол магнітно-механічного зв'язку 15 складається з приводних коліс 17, з жорстко приєднаними до них лопатками механізму руху 18, які мають ряд еліптичних отворів. Приводні колеса насаджені на вісь 19. Лопатки механізму руху 18 по слизькій посадці встановлено всередині статора 13, вільний простір між лопатками 18 і статором 13 заповнено ФМР 20. На фіг. 2 показано двигун з прикладом розташування обмоток статора 13 і ротора 26, який складається з двох частин. Електромагнітні приводи є спарені по кількості ведучих осей. По окружності в зоні сполучення привідного колеса 17 і статора 13 встановлено намагнічений обід 21. На колесі 17 поза зоною, охопленою статором, встановлено пелюстку 22, а на корпусі транспортного засобу знаходиться індикатор датчика швидкості колеса індукційного 1 UA 116443 U 5 10 15 20 25 30 35 40 45 50 55 60 типу 23. Другий індикатор датчика швидкості ФМР 24 встановлено на корпусі транспортного засобу в зоні находження ФМР. Статор 13 жорстко з'єднано з корпусом транспортного засобу. Працює привід наступним чином. В вихідному стані джерело напруги (акумулятор) відключено від привода, який знаходиться у стані спокою. Після включення перемикача 2 напруга від джерела 1 подається на компаратор 6 і перетворювач напруги 3, який складається з генератора 4 і вихідного каскада 5. Одночасно з включенням перемикача 2 на компаратор 6 подається потрібне завдання швидкості з виходу блока програм 7, на виході якого в залежності від заданої і реальної швидкостей формується керуюча напруга, яка через компаратор 6 подається на входи генератора 4 і вихідного каскаду 5. Частота на виході генератора 4 і фазовий зсув сигналів на виходах 12 і 14 блока 5 визначається керуючою напругою блока 6. На виході перетворювача 3 частота і напруга живлення обмоток статора 13 може змінюватись в широких межах. Обмотки статора 13 охоплюють лопатки 18 механізму руху, які виготовлено із феромагнітного матеріалу, а ФМР 20 знаходиться між ними. Обмотки статора формують електромагнітне поле, яке обертається і приводить до руху лопатки 18 і ФМР. Кутова швидкість електромагнітного поля в зоні дії обмоток статора 13 перевищує швидкість лопаток 18 і ФМР і може регулюватись залежно від швидкості ФМР і лопаток. Внаслідок впливу магнітного поля ФМР рухається ні строго по окружності, а одночасно здійснює поступальний рух по окружності і хвильовий рух з амплітудою, яка залежить від величини струму в статорі і напряму дії вектора напруженості електромагнітного поля. Статор 13 складається з двох обмоток. Одна з них розташована між віссю 19 і внутрішньою окружністю, по якій рухаються лопатки 18, а друга обмотка розташована по зовнішній окружності руху лопаток 18. Зсув фаз напруги живлення в двох обмотках, а також зміна величини струму в цих обмотках створює умови резонансного збудження хвиль ФМР магнітним полем. Причому, при різниці швидкостей ФМР і привідного колеса 17 в межах 1 % від заданої швидкості руху механізму результуюча сила впливу електромагнітного поля спрямована по окружності зовнішньо, що сприяє значному зниженню гідравлічного опору при хвильовому русі ФМР скрізь отвори в лопатках механізму руху 18 і дозволяє невеликою витратою енергії отримати значне прискорення в русі ФМР. При різниці швидкостей більш 1 % від заданої швидкості зміною зсуву фаз і величини струму в обмотках статора 13 має місце зсув вектора напруженості електромагнітного поля. В результаті змінюється рух потоку ФМР відносно руху лопаток 18 (змінюється конфігурація хвилі і кут зустрічі її з лопатками 18), що приводить до зміни моменту, з яким передається рух лопаткам 18, т.ч. до зміни прискорення руху привідних коліс механізму. Швидкість обертання колеса вимірюється індикатором індукційного типу 23. Швидкість руху ФМР вимірюється індикатором 24. Вихідні сигнали індикаторів 23 і 24 надходять до блока виміру швидкостей ФМР і привідного колеса 10 (див. фіг. 1). Різниця швидкостей ФМР і привідного колеса перетворюється в цьому блоці і подається до компаратора 6 і блока програм 7. Здійснення реверсу в пропонованому пристрої виконується зміною напрямку електромагнітного поля в індукторі 13, яке реалізується автоматично перекомутацією виходів блока 5. Різке гальмування привідного механізму також здійснюється включенням приводу в напрямі зворотного руху, який має бути виконано в момент гальмування до зупинки механізму. При зупинці привід відключається перемикачем 2. Аварійне гальмування здійснюється підключенням перемикачем 16 статора 13 безпосередньо до акумулятора (показано на фіг. 1 пунктиром). ФМР 20 і лопаті механізму руху 18 при цьому фіксуються постійним електромагнітним полем, що перешкоджає обертанню рухомих коліс 17 і осі 19. Включення перемикача 16 передбачає відключення елементів, які живляться через перемикач 2. При живленні приводу від акумулятора необхідна енергія надходить з акумулятора тільки при запуску привода. Живлення працюючого приводу здійснюється від генератора змінного струму 8, який встановлено на осі 19 привідного механізму. На великій швидкості генератор змінного струму 8 надлишок енергії передає акумулятору. Таким чином, найбільш повно використовується енергія генератора змінного струму 8, що значно покращує енергетичні характеристики приводу. Поворот здійснюється внаслідок різниці швидкостей обертання двох коліс, для чого в програмному блоці 7 є функціональний перемикач вліво-вправо, який діє на елементи статора блока 13 ("ОСП"-право, "ОСЛ"-ліво). Для запобігання витікання ФМР по окружності колеса 17 встановлено попередньо намагнічений обід 21. На стоянці транспортного засобу може бути використано ручне гальмо відомої конструкції. Використання в електромагнітному приводі ФМР (20) як елемента передачі руху, автоматичний вибір частоти обертів ФМР і лопаток механізму руху (18), поділ процесу 2 UA 116443 U 5 прискорення механізму руху привода на два етапи: прискорення ФМР і прискорення механізму руху, електроживлення приводу транспортних засобів від акумулятора і генератора змінного струму дозволяє підвищити надійність, енергетичні показники, спростити конструкцію транспортних засобів. Особливо ефективний пропонований привід у складних шляхових та погодних умовах. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 1. Транспортний засіб, що містить раму, провідні і ведені осі, електромагнітні приводи по кількості ведучих осей, кожен привід якого містить двигун зі статором, жорстко з'єднаним з корпусом, генератор змінного струму, системи керування, системи гальмування і рекуперації енергії, швидко знімний секційний акумулятор, датчики виміру швидкості, який відрізняється тим, що електромагнітні приводи, які є спареними по кількості ведучих осей, мають ротор, який складається з двох частин, з'єднаних з колесами, причому ротори двигуна мають лопатки з прорізами, а порожнина між ротором і статором заповнена феромагнітною рідиною, а система керування, гальмування і рекуперації енергії включає перетворювач напруги, який має генератор сигналу завдання, входи якого з'єднані з виходами компаратора і перемикача джерела напруги і вихідний каскад, входи якого з'єднані з виходами перемикача джерела напруги, генератора і компаратора, а вихід вихідного каскаду з'єднано з обмоткою статора; входи компаратора з'єднані з виходами перемикача напруги, блока програм, входи якого з'єднані з блоком виміру швидкості феромагнітної рідини і приводного колеса. 2. Транспортний засіб за п. 1, в якому джерело постійного струму з'єднано зі статором разом з генератором рекуперації енергії через перетворювач напруги і блок перемикача режимів. 3. Транспортний засіб за будь-яким з пп. 1, 2, в якому обмотка статора з'єднана за допомогою додаткового перемикача з джерелом постійного струму. 3 UA 116443 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B60K 7/00
Мітки: транспортний, засіб
Код посилання
<a href="https://ua.patents.su/6-116443-transportnijj-zasib.html" target="_blank" rel="follow" title="База патентів України">Транспортний засіб</a>
Робочий транспортний засіб, вузол двигуна внутрішнього згоряння, спосіб експлуатації робочого транспортного засобу, транспортний засіб
Номер патенту: 89680
Опубліковано: 25.02.2010
Автори: Чейні Марк Майкл, Маз Брайан Джозеф
МПК: A01F 12/00, B60H 3/06, B60K 13/00
Мітки: транспортний, спосіб, двигуна, засіб, робочий, експлуатації, вузол, засобу, робочого, транспортного, внутрішнього, згоряння
Формула / Реферат:
1. Робочий транспортний засіб, який містить:корпус, двигун внутрішнього згоряння, який міститься у моторному відсіку у корпусі транспортного засобу; повітрозабирач совкового типу, розміщений біля верхньої частини корпуса транспортного засобу і звернений у напрямку нагору, причому повітрозабирач совкового типу може повертатися між першим закритим транспортним положенням і другим відкритим робочим положенням для спрямовування повітря до...
Транспортний засіб

Номер патенту: 68188
Опубліковано: 26.11.2007
Автори: Соколовський Іван Івановіч, Дзензерський Віктор Олександрович, Плаксін Сергій Вікторович, Погоріла Любов Михайлівна, Житник Микола Явтухович
МПК: B63H 11/00, F03G 7/00
Мітки: транспортний, засіб
Формула / Реферат:
Транспортний засіб, що містить електрогідродинамічний двигун, що складається з джерела постійної напруги, першого електродвигуна, трифазного генератора змінного струму, випрямляча, трисекційного вимикача, високовольтного перетворювача, ємнісного накопичувача енергії, який відрізняється тим, що в електрогідродинамічний двигун додатково введений другий електродвигун, закріплений в циліндричному корпусі, блок регулятора обертів вказаного...
Транспортний засіб високої прохідності

Номер патенту: 33814
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: високої, транспортний, прохідності, засіб
Формула / Реферат:
Транспортний засіб високої прохідності, що містить передню та задню піврами, які з'єднані з колісними рушіями, який відрізняється тим, що задня піврама виконана у вигляді окремих лівої та правої піврам, шарнірно з'єднаних з передньою піврамою незалежно одна від одної.
Колісний транспортний засіб з мускульним приводом
Номер патенту: 46044
Опубліковано: 15.05.2002
Автори: Карл-Хайнц Клінгебіель, Томас Брендель, Мартін Пуш
МПК: A61G 5/00
Мітки: приводом, мускульним, колісний, транспортний, засіб
Формула / Реферат:
1. Колісний транспортний засіб з мускульним приводом, зокрема крісло-візок, із щонайменше одним привідним колесом, в яке вмонтований зв'язаний із нерухомим вузлом кріплення колеса та обертальними деталями колеса безредукторний електричний двигун із зовнішнім ротором, який для створення додаткового обертального моменту вмикається блоком управління, причому на зовнішньому боці вузла кріплення колеса встановлено статор двигуна із зовнішнім...
Двоколісний одноколійний складаний транспортний засіб

Номер патенту: 17786
Опубліковано: 16.10.2000
Автор: Почепа Левко Миколайович
МПК: B62K 15/00, B62K 3/00
Мітки: засіб, одноколійний, складаний, двоколісний, транспортний
Формула / Реферат:
1. Двоколісний, одноколійний, складаний транспортний засіб з обома керованими колесами, що містить технічні засоби передачі повороту від руля, закріпленого на вилці переднього колеса, на заднє колесо з допомогою тяг, який відрізняється тим, що підвіска переднього колеса складена з вилки з рульовим шарніром, закріпленим на верхній передній частині рами з допомогою циліндричного шарніра, вісь якого перпендикулярна площині рами, механізма,...
Попередній патент: Спосіб формування свердловинних зарядів
Наступний патент: Спосіб улаштування вузла з’єднання плит з ригелем у збірно-монолітних перекриттях
Випадковий патент: Пристрій підвищення ефективності нічного освітлення з використанням енергії сонячних батарей