Колісний транспортний засіб з мускульним приводом
Номер патенту: 46044
Опубліковано: 15.05.2002
Автори: Карл-Хайнц Клінгебіель, Мартін Пуш, Томас Брендель
Формула / Реферат
1. Колісний транспортний засіб з мускульним приводом, зокрема крісло-візок, із щонайменше одним привідним колесом, в яке вмонтований зв'язаний із нерухомим вузлом кріплення колеса та обертальними деталями колеса безредукторний електричний двигун із зовнішнім ротором, який для створення додаткового обертального моменту вмикається блоком управління, причому на зовнішньому боці вузла кріплення колеса встановлено статор двигуна із зовнішнім ротором, а встановлений на вузлі кріплення колеса на кулькових підшипниках ротор двигуна з'єднаний із обертальними функціональними деталями колеса, який відрізняється тим, що вузол кріплення колеса містить розміщену концентрично навколо маточини кільцеву порожнину, в якій розміщений блок управління двигуном, а також акумулятор та/або батарея живлення, ротор встановлено на підшипниках на зовнішньому периметрі вузла кріплення колеса, привідне колесо оснащене ободом ручного приводу, блок управління двигуном з'єднаний з датчиком моменту, призначеним для визначення моменту обертання, прикладеного до обода ручного приводу.
2. Колісний транспортний засіб згідно з п. 1, який відрізняється тим, що датчик моменту містить два розміщених концентрично, із зміщенням вздовж осі, з'єднаних із ободом ручного приводу або роторно-корпусним кільцем і між собою через торсійну пружину кільця, в яких виконані наскрізні вибірки, що просвічуються паралельним осі напрямленим променем світла, причому ослаблення світлового променя у вигляді аналогового сигналу є сигналом управління електродвигуном .
3. Колісний транспортний засіб згідно з п. 1, який відрізняється тим, що обід ручного приводу через пластинчасті пружини зв'язаний з болтом, встановленим у одній із обертальних функціональних конструктивних деталей колеса, переважно в ободі, з можливістю обертання навколо радіально розміщеної осі відносно датчика обертання, який перетворює поворот болта, як наслідок прикладання рукою до обода обертального моменту, в електричний сигнал, що подається на блок управління двигуном.
4. Колісний транспортний засіб згідно з п. 1, який відрізняється тим, що обід ручного приводу через пластинчасті пружини зв'язаний із валом, з можливістю обертання встановленим у одній із обертальних функціональних конструктивних деталей колеса, переважно в ободі, і кінематично зв'язаним із рухомим кільцем таким чином, що обертання вала, як наслідок прикладання рукою до обода ручного приводу обертального моменту, призводить до паралельного осі колеса зміщення кільця відносно закріпленого зовні на нерухомій частині колеса, переважно на вузлі кріплення колеса датчика, який перетворює переміщення рухомого кільця в електричний сигнал, що подається на блок управління двигуном.
5. Колісний транспортний засіб згідно з одним із попередніх пунктів, який відрізняється тим, що привідне колесо або його нерухомий вузол кріплення колеса сполучене із рамою транспортного засобу лише механічно через швидкодійну муфту.
Текст
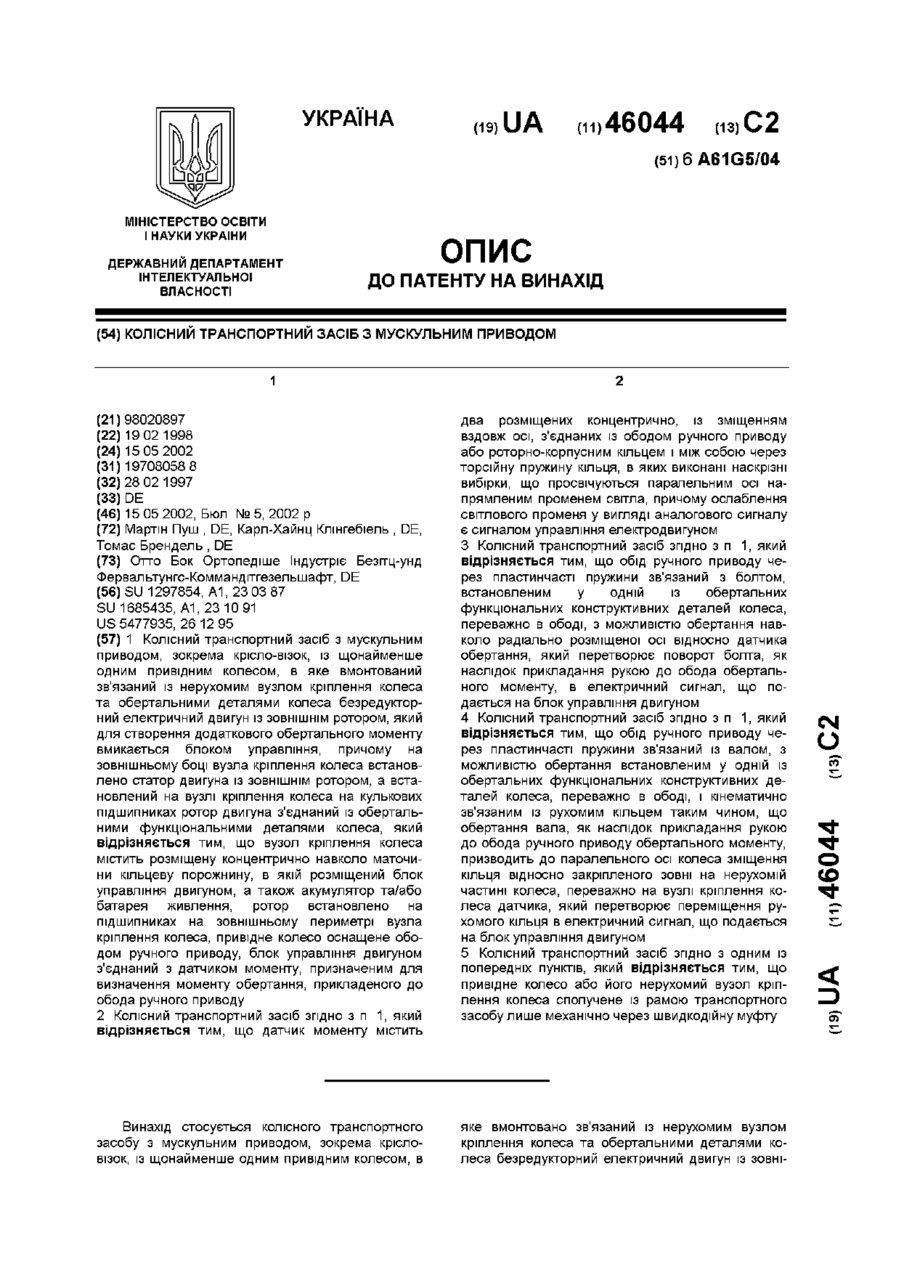
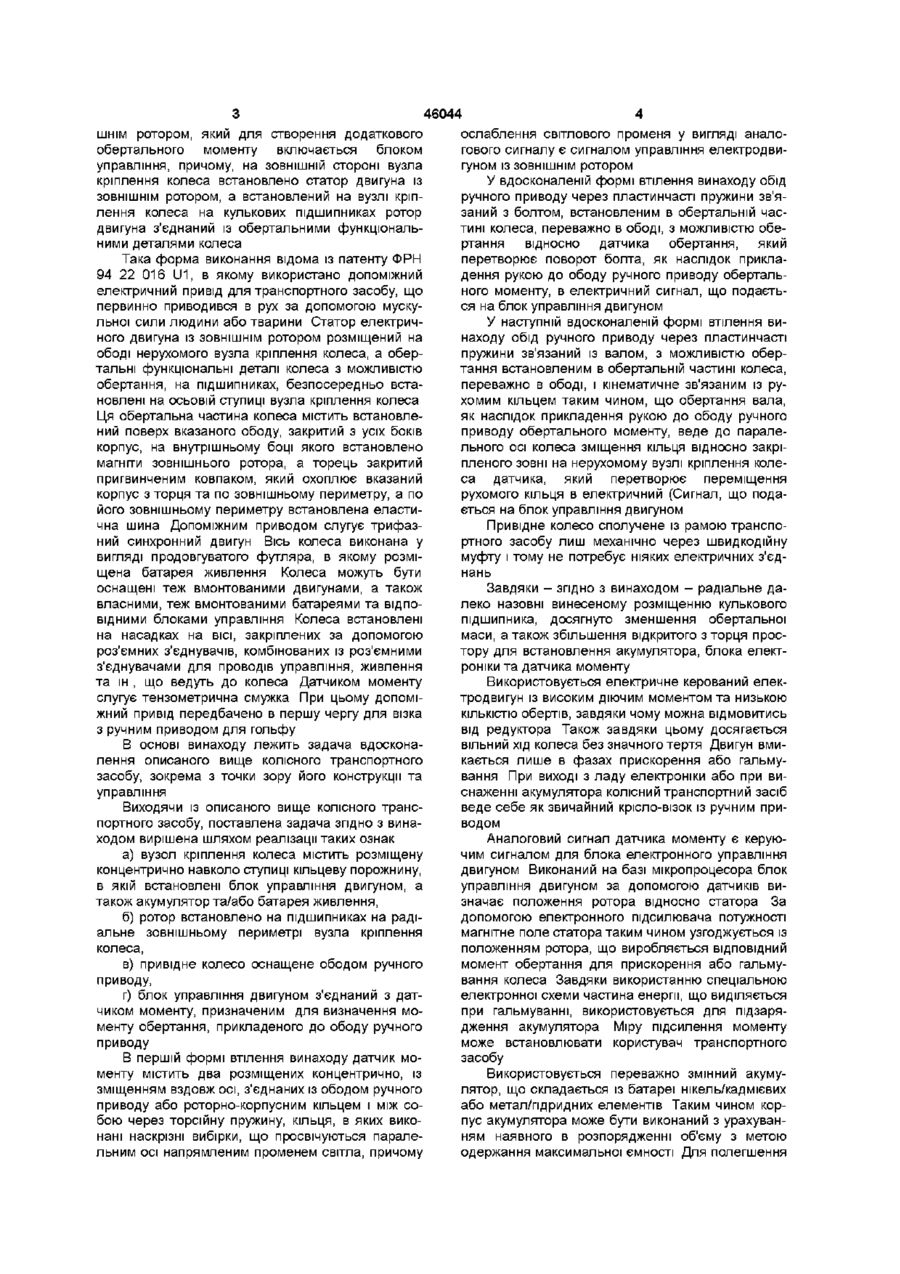
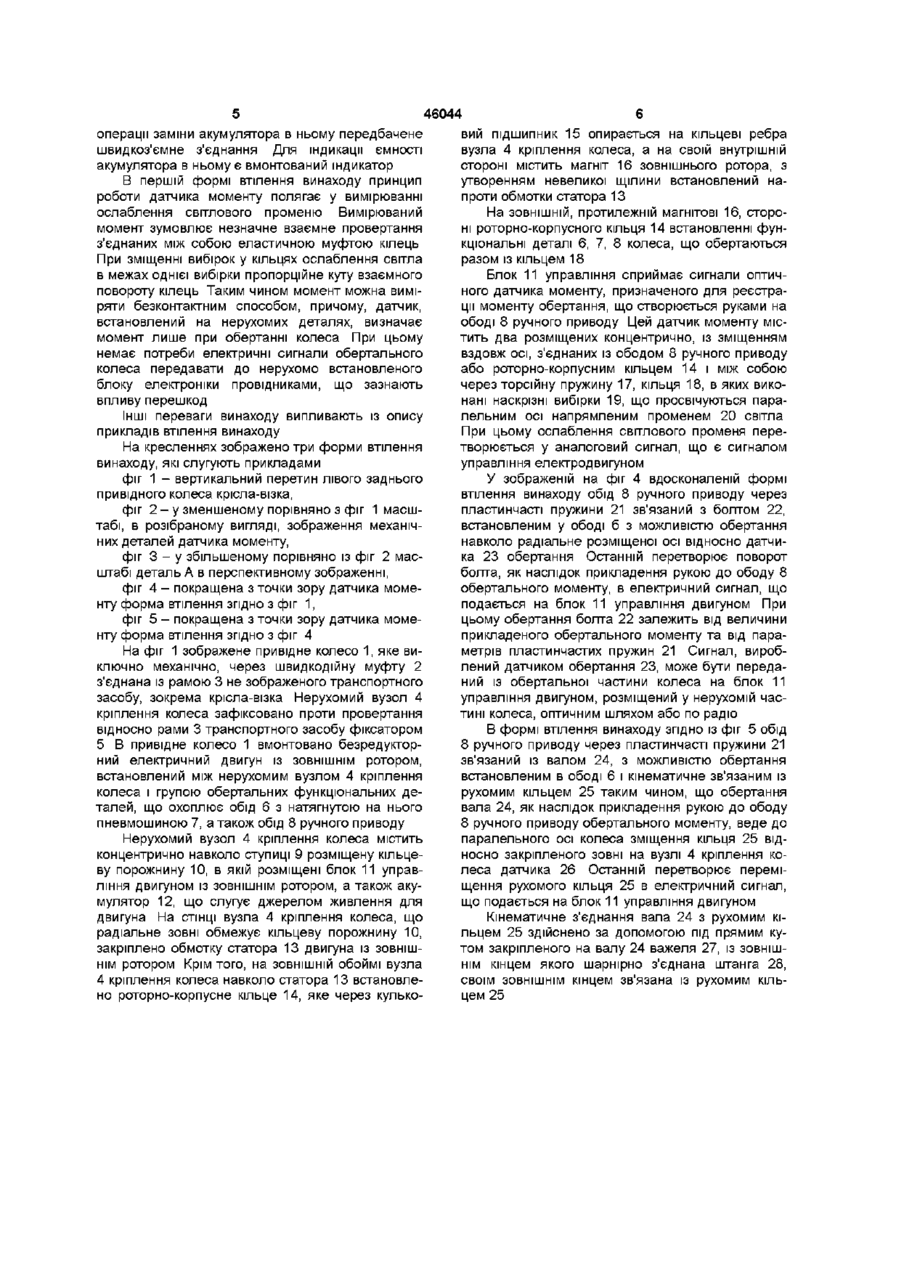
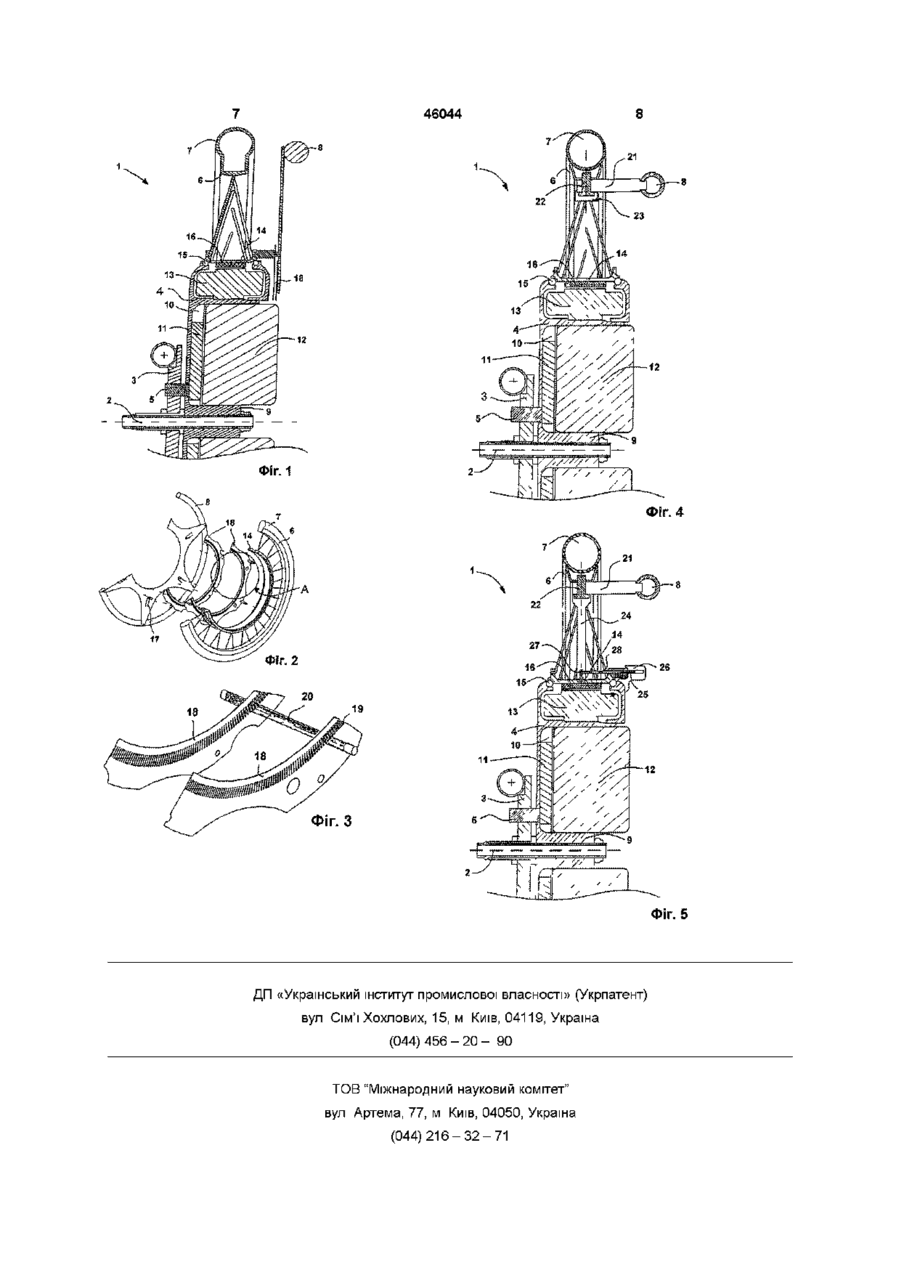
1 Колісний транспортний засіб з мускульним приводом, зокрема крісло-візок, із щонайменше одним привідним колесом, в яке вмонтований зв'язаний із нерухомим вузлом кріплення колеса та обертальними деталями колеса безредукторний електричний двигун із ЗОВНІШНІМ ротором, який для створення додаткового обертального моменту вмикається блоком управління, причому на зовнішньому боці вузла кріплення колеса встановлено статор двигуна із ЗОВНІШНІМ ротором, а встановлений на вузлі кріплення колеса на кулькових підшипниках ротор двигуна з'єднаний із обертальними функціональними деталями колеса, який відрізняється тим, що вузол кріплення колеса містить розміщену концентрично навколо маточини кільцеву порожнину, в якій розміщений блок управління двигуном, а також акумулятор та/або батарея живлення, ротор встановлено на підшипниках на зовнішньому периметрі вузла кріплення колеса, привідне колесо оснащене ободом ручного приводу, блок управління двигуном з'єднаний з датчиком моменту, призначеним для визначення моменту обертання, прикладеного до обода ручного приводу 2 Колісний транспортний засіб згідно з п 1, який відрізняється тим, що датчик моменту містить Винахід стосується колісного транспортного засобу з мускульним приводом, зокрема крісловізок, із щонайменше одним привідним колесом, в два розміщених концентрично, із зміщенням вздовж осі, з'єднаних із ободом ручного приводу або роторно-корпусним кільцем і між собою через торсійну пружину кільця, в яких виконані наскрізні вибірки, що просвічуються паралельним осі напрямленим променем світла, причому ослаблення світлового променя у вигляді аналогового сигналу є сигналом управління електродвигуном 3 Колісний транспортний засіб згідно з п 1, який відрізняється тим, що обід ручного приводу через пластинчасті пружини зв'язаний з болтом, встановленим у одній із обертальних функціональних конструктивних деталей колеса, переважно в ободі, з можливістю обертання навколо радіально розміщеної осі відносно датчика обертання, який перетворює поворот болта, як наслідок прикладання рукою до обода обертального моменту, в електричний сигнал, що подається на блок управління двигуном 4 Колісний транспортний засіб згідно з п 1, який відрізняється тим, що обід ручного приводу через пластинчасті пружини зв'язаний із валом, з можливістю обертання встановленим у одній із обертальних функціональних конструктивних деталей колеса, переважно в ободі, і кінематично зв'язаним із рухомим кільцем таким чином, що обертання вала, як наслідок прикладання рукою до обода ручного приводу обертального моменту, призводить до паралельного осі колеса зміщення кільця відносно закріпленого зовні на нерухомій частині колеса, переважно на вузлі кріплення колеса датчика, який перетворює переміщення рухомого кільця в електричний сигнал, що подається на блок управління двигуном 5 Колісний транспортний засіб згідно з одним із попередніх пунктів, який відрізняється тим, що привідне колесо або його нерухомий вузол кріплення колеса сполучене із рамою транспортного засобу лише механічно через швидкодійну муфту яке вмонтовано зв язании із нерухомим вузлом кріплення колеса та обертальними деталями колеса безредукторний електричний двигун із зовні О о (О 46044 ослаблення світлового променя у вигляді аналошнім ротором, який для створення додаткового гового сигналу є сигналом управління електродвиобертального моменту включається блоком гуном із ЗОВНІШНІМ ротором управління, причому, на ЗОВНІШНІЙ стороні вузла У вдосконаленій формі втілення винаходу обід кріплення колеса встановлено статор двигуна із ручного приводу через пластинчасті пружини зв'яЗОВНІШНІМ ротором, а встановлений на вузлі кріпзаний з болтом, встановленим в обертальній часлення колеса на кулькових підшипниках ротор тині колеса, переважно в ободі, з можливістю обедвигуна з'єднаний із обертальними функціональртання відносно датчика обертання, який ними деталями колеса перетворює поворот болта, як наслідок приклаТака форма виконання відома із патенту ФРН дення рукою до ободу ручного приводу оберталь94 22 016 U1, в якому використано допоміжний ного моменту, в електричний сигнал, що подаєтьелектричний привід для транспортного засобу, що ся на блок управління двигуном первинно приводився в рух за допомогою мускульної сили людини або тварини Статор електричУ наступній вдосконаленій формі втілення виного двигуна із ЗОВНІШНІМ ротором розміщений на находу обід ручного приводу через пластинчасті ободі нерухомого вузла кріплення колеса, а оберпружини зв'язаний із валом, з можливістю обертальні функціональні деталі колеса з можливістю тання встановленим в обертальній частині колеса, обертання, на підшипниках, безпосередньо встапереважно в ободі, і кінематичне зв'язаним із руновлені на осьовій ступиці вузла кріплення колеса хомим кільцем таким чином, що обертання вала, Ця обертальна частина колеса містить встановлеяк наслідок прикладення рукою до ободу ручного ний поверх вказаного ободу, закритий з усіх боків приводу обертального моменту, веде до паралекорпус, на внутрішньому боці якого встановлено льного осі колеса зміщення кільця відносно закрімагніти зовнішнього ротора, а торець закритий пленого зовні на нерухомому вузлі кріплення колепригвинченим ковпаком, який охоплює вказаний са датчика, який перетворює переміщення корпус з торця та по зовнішньому периметру, а по рухомого кільця в електричний (Сигнал, що подайого зовнішньому периметру встановлена еластиється на блок управління двигуном чна шина Допоміжним приводом слугує трифазПривідне колесо сполучене із рамою транспоний синхронний двигун Вісь колеса виконана у ртного засобу лиш механічно через швидкодійну вигляді продовгуватого футляра, в якому розмімуфту і тому не потребує ніяких електричних з'єдщена батарея живлення Колеса можуть бути нань оснащені теж вмонтованими двигунами, а також Завдяки - згідно з винаходом - радіальне давласними, теж вмонтованими батареями та ВІДПОлеко назовні винесеному розміщенню кулькового ВІДНИМИ блоками управління Колеса встановлені підшипника, досягнуто зменшення обертальної на насадках на ВІСІ, закріплених за допомогою маси, а також збільшення відкритого з торця просроз'ємних з'єднувачів, комбінованих із роз'ємними тору для встановлення акумулятора, блока електз'єднувачами для проводів управління, живлення роніки та датчика моменту та ш , що ведуть до колеса Датчиком моменту Використовується електричне керований елекслугує тензометрична смужка При цьому допомітродвигун із високим діючим моментом та низькою жний привід передбачено в першу чергу для візка КІЛЬКІСТЮ обертів, завдяки чому можна відмовитись з ручним приводом для гольфу від редуктора Також завдяки цьому досягається вільний хід колеса без значного тертя Двигун вмиВ основі винаходу лежить задача вдосконакається лише в фазах прискорення або гальмулення описаного вище колісного транспортного вання При виході з ладу електроніки або при визасобу, зокрема з точки зору його конструкції та снаженні акумулятора колісний транспортний засіб управління веде себе як звичайний крісло-візок із ручним приВиходячи із описаного вище колісного трансводом портного засобу, поставлена задача згідно з винаходом вирішена шляхом реалізації таких ознак Аналоговий сигнал датчика моменту є керуючим сигналом для блока електронного управління а) вузол кріплення колеса містить розміщену двигуном Виконаний на базі мікропроцесора блок концентрично навколо ступиці кільцеву порожнину, управління двигуном за допомогою датчиків вив якій встановлені блок управління двигуном, а значає положення ротора відносно статора За також акумулятор та/або батарея живлення, допомогою електронного підсилювача потужності б) ротор встановлено на підшипниках на радімагнітне поле статора таким чином узгоджується із альне зовнішньому периметрі вузла кріплення положенням ротора, що виробляється ВІДПОВІДНИЙ колеса, момент обертання для прискорення або гальмув) привідне колесо оснащене ободом ручного вання колеса Завдяки використанню спеціальною приводу, електронної схеми частина енергії, що виділяється г) блок управління двигуном з'єднаний з датпри гальмуванні, використовується для підзарячиком моменту, призначеним для визначення модження акумулятора Міру підсилення моменту менту обертання, прикладеного до ободу ручного може встановлювати користувач транспортного приводу засобу В першій формі втілення винаходу датчик моменту містить два розміщених концентрично, із Використовується переважно змінний акумузміщенням вздовж осі, з'єднаних із ободом ручного лятор, що складається із батареї нікель/кадмієвих приводу або роторно-корпусним кільцем і між соабо метал/гідридних елементів Таким чином корбою через торсійну пружину, кільця, в яких викопус акумулятора може бути виконаний з урахуваннані наскрізні вибірки, що просвічуються параленям наявного в розпорядженні об'єму з метою льним осі напрямленим променем світла, причому одержання максимальної ємності Для полегшення 46044 операції заміни акумулятора в ньому передбачене швидкоз'ємне з'єднання Для індикації ємності акумулятора в ньому є вмонтований індикатор В першій формі втілення винаходу принцип роботи датчика моменту полягає у вимірюванні ослаблення світлового променю Вимірюваний момент зумовлює незначне взаємне провертання з'єднаних між собою еластичною муфтою кілець При зміщенні вибірок у кільцях ослаблення світла в межах однієї вибірки пропорційне куту взаємного повороту кілець Таким чином момент можна виміряти безконтактним способом, причому, датчик, встановлений на нерухомих деталях, визначає момент лише при обертанні колеса При цьому немає потреби електричні сигнали обертального колеса передавати до нерухомо встановленого блоку електроніки провідниками, що зазнають впливу перешкод Інші переваги винаходу випливають із опису прикладів втілення винаходу На кресленнях зображено три форми втілення винаходу, які слугують прикладами фіг 1 - вертикальний перетин лівого заднього привідного колеса крісла-візка, фіг 2 - у зменшеному порівняно з фіг 1 масштабі, в розібраному вигляді, зображення механічних деталей датчика моменту, фіг 3 - у збільшеному порівняно із фіг 2 масштабі деталь А в перспективному зображенні, фіг 4 - покращена з точки зору датчика моменту форма втілення згідно з фіг 1, фіг 5 - покращена з точки зору датчика моменту форма втілення згідно з фіг 4 На фіг 1 зображене привідне колесо 1, яке виключно механічно, через швидкодійну муфту 2 з'єднана із рамою 3 не зображеного транспортного засобу, зокрема крісла-візка Нерухомий вузол 4 кріплення колеса зафіксовано проти провертання відносно рами 3 транспортного засобу фіксатором 5 В привідне колесо 1 вмонтовано безредукторний електричний двигун із ЗОВНІШНІМ ротором, встановлений між нерухомим вузлом 4 кріплення колеса і групою обертальних функціональних деталей, що охоплює обід 6 з натягнутою на нього пневмошиною 7, а також обід 8 ручного приводу Нерухомий вузол 4 кріплення колеса містить концентрично навколо ступиці 9 розміщену кільцеву порожнину 10, в якій розміщені блок 11 управління двигуном із ЗОВНІШНІМ ротором, а також акумулятор 12, що слугує джерелом живлення для двигуна На СТІНЦІ вузла 4 кріплення колеса, що радіальне зовні обмежує кільцеву порожнину 10, закріплено обмотку статора 13 двигуна із ЗОВНІШНІМ ротором Крім того, на ЗОВНІШНІЙ обоймі вузла 4 кріплення колеса навколо статора 13 встановлено роторно-корпусне кільце 14, яке через кулько вий підшипник 15 опирається на кільцеві ребра вузла 4 кріплення колеса, а на своїй внутрішній стороні містить магніт 16 зовнішнього ротора, з утворенням невеликої щілини встановлений напроти обмотки статора 13 На ЗОВНІШНІЙ, протилежній магнітові 16, стороні роторно-корпусного кільця 14 встановленні функціональні деталі 6, 7, 8 колеса, що обертаються разом із кільцем 18 Блок 11 управління сприймає сигнали оптичного датчика моменту, призначеного для реєстрації моменту обертання, що створюється руками на ободі 8 ручного приводу Цей датчик моменту містить два розміщених концентрично, із зміщенням вздовж осі, з'єднаних із ободом 8 ручного приводу або роторно-корпусним кільцем 14 і між собою через торсійну пружину 17, кільця 18, в яких виконані наскрізні вибірки 19, що просвічуються паралельним осі напрямленим променем 20 світла При цьому ослаблення світлового променя перетворюється у аналоговий сигнал, що є сигналом управління електродвигуном У зображеній на фіг 4 вдосконаленій формі втілення винаходу обід 8 ручного приводу через пластинчасті пружини 21 зв'язаний з болтом 22, встановленим у ободі б з можливістю обертання навколо радіальне розміщеної осі відносно датчика 23 обертання Останній перетворює поворот болта, як наслідок прикладення рукою до ободу 8 обертального моменту, в електричний сигнал, що подається на блок 11 управління двигуном При цьому обертання болта 22 залежить від величини прикладеного обертального моменту та від параметрів пластинчастих пружин 21 Сигнал, вироблений датчиком обертання 23, може бути переданий із обертальної частини колеса на блок 11 управління двигуном, розміщений у нерухомій частині колеса, оптичним шляхом або по радіо В формі втілення винаходу згідно із фіг 5 обід 8 ручного приводу через пластинчасті пружини 21 зв'язаний із валом 24, з можливістю обертання встановленим в ободі 6 і кінематичне зв'язаним із рухомим кільцем 25 таким чином, що обертання вала 24, як наслідок прикладення рукою до ободу 8 ручного приводу обертального моменту, веде до паралельного осі колеса зміщення кільця 25 відносно закріпленого зовні на вузлі 4 кріплення колеса датчика 26 Останній перетворює переміщення рухомого кільця 25 в електричний сигнал, що подається на блок 11 управління двигуном Кінематичне з'єднання вала 24 з рухомим кільцем 25 здійснено за допомогою під прямим кутом закріпленого на валу 24 важеля 27, із ЗОВНІШНІМ кінцем якого шарнірно з'єднана штанга 28, своїм ЗОВНІШНІМ кінцем зв'язана із рухомим кільцем 25 46044 Фіг, 1 Фіг. 4 ФІГ, 2 20 Фіг З Фіг. 5 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A61G 5/00
Мітки: приводом, транспортний, засіб, колісний, мускульним
Код посилання
<a href="https://ua.patents.su/4-46044-kolisnijj-transportnijj-zasib-z-muskulnim-privodom.html" target="_blank" rel="follow" title="База патентів України">Колісний транспортний засіб з мускульним приводом</a>
Велосипед з мускульним переднім приводом
Номер патенту: 43136
Опубліковано: 15.11.2001
Автор: Вакуленко Валентин Олександрович
МПК: B62M 1/00
Мітки: велосипед, мускульним, переднім, приводом
Формула / Реферат:
1. Велосипед з мускульним переднім приводом, який складається із рами з сидінням, руля, двох вилок з колесами та обгінними муфтами на одному з них та приводу з педалями, який відрізняється тим, що кожна з вилок виконана з труби у вигляді літери П і рамки, причому одна з вилок жорстко з'єднана рамою, а друга є рульовою, привід складається з двох секторів, які за допомогою знімної осі встановлені на будь-якій вилці та кінематично зв'язані із...
Транспортний засіб

Номер патенту: 25237
Опубліковано: 30.10.1998
Автор: Конончук Дмитро Володимирович
Мітки: транспортний, засіб
Формула / Реферат:
Транспортний засіб, що містить раму із колесами, рулем та сідлом, а також приводом переміщення у вигляді педалей, пов'язаних ланцюгом із зірочкою приводної втулки, який відрізняється тим, що привід переміщення додатково споряджено накопичувачем енергії у вигляді плоскої пружини кручення, що поміщена в корпус та пов'язана через зубчасту передачу й муфту вмикання із зірочкою приводної втулки, а на рамі встановлено важіль управління, пов'язаний...
Транспортний засіб, рама транспортного засобу, м’язовий привід

Номер патенту: 38133
Опубліковано: 15.05.2001
Автор: Хребтань Геннадій Анатолійович
МПК: B62K 19/00, B62K 17/00, B62M 1/00
Мітки: транспортного, засіб, засобу, транспортний, привід, рама, м'язовий
Формула / Реферат:
1. Транспортний засіб, до складу якого входять рама, поворотне та неповоротне колесо(а), сидіння, опора для рук та м'язовий привод ножним та/або ручним хитаючимися "догори-вниз' або "вперед-назад" важелями із можливістю їх автономної або синхронної роботи, із механізмом вільного ходу і гнучкою та/або жорсткою прямою або і проміжною предачою на вісь ведучого колеса, який відрізняється тим, що вісь повороту важеля приводу, що...
Транспортний засіб, переважно моторолер

Номер патенту: 33337
Опубліковано: 15.02.2001
Автор: Босак Олександр Валер'янович
МПК: B62K 11/00, A63H 17/00, A63H 27/00, B62K 15/00
Мітки: переважно, засіб, транспортний, моторолер
Текст:
...рами* просто на нового зверху при опусканні передньої частини рами можна сідати ,колеса теж знаходяться при складанні у коробі, цей транспортний засіб має неабиякі зменшені габарити та вагу і тому його можна перекосити у руках, Б рюкзаку чи котити як теліжку, а значить і тримати у себе вдома, гараж тут не необхідний. Зрозуміло, що в гілому ия конструкція зручна і проста в експлуатації і обслуговуванні. Винахід пояснюється кресленнями, де на...
Двоколісний одноколійний складаний транспортний засіб

Номер патенту: 17786
Опубліковано: 16.10.2000
Автор: Почепа Левко Миколайович
МПК: B62K 15/00, B62K 3/00
Мітки: транспортний, засіб, двоколісний, складаний, одноколійний
Формула / Реферат:
1. Двоколісний, одноколійний, складаний транспортний засіб з обома керованими колесами, що містить технічні засоби передачі повороту від руля, закріпленого на вилці переднього колеса, на заднє колесо з допомогою тяг, який відрізняється тим, що підвіска переднього колеса складена з вилки з рульовим шарніром, закріпленим на верхній передній частині рами з допомогою циліндричного шарніра, вісь якого перпендикулярна площині рами, механізма,...
Попередній патент: Шестеренна гідромашина
Наступний патент: Пристрій для збирання нафти з поверхні води
Випадковий патент: Спосіб гідровисіву пророщеного насіння