Комбінований багатопозиційний привід з цифровим керуванням
Номер патенту: 120810
Опубліковано: 27.11.2017
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович, Поколенко Євгеній Олександрович
Формула / Реферат
Комбінований багатопозиційний привід з цифровим керуванням, що містить виконавчий циліндр з послідовно розміщеними в ньому розрядними мембранами з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють штокову камеру, яка сполучна з гідрокамерами розрядних гідравлічних дозаторів, пневматичні камери яких сполучені з вихідними каналами пневматичних двопозиційних розподільників з одностороннім електричним керуванням, контакти електромагнітів яких примкнені до керуючих контактів електромагнітного дешифратора, вихідні контакти якого сполучені з вхідними контактами датчика лінійного переміщення, виконаного у вигляді ланцюга нормально замкнених герметичних контактів (герконів) і вихідних контактів та закріпленого на штоці розмикача, виконаного у вигляді магніту довжиною, більшою за величину кроку розміщення герметичних контактів, який відрізняється тим, що штокова камера зворотного руху виконавчого циліндра сполучена через зворотні клапани і дроселі з вихідними каналами трьох двопозиційних дволінійних з одностороннім електричним керуванням гідравлічних розподільників, вхідні канали яких з'єднані з гідравлічною камерою пневмогідравлічного акумулятора, при цьому електричні контакти магнітів двох розподільників підключені до вихідних контактів датчика лінійного переміщення і до вхідних контактів логічного елемента АБО, вихідний контакт якого підключений до котушки електромагніта третього гідравлічного розподільника.
Текст
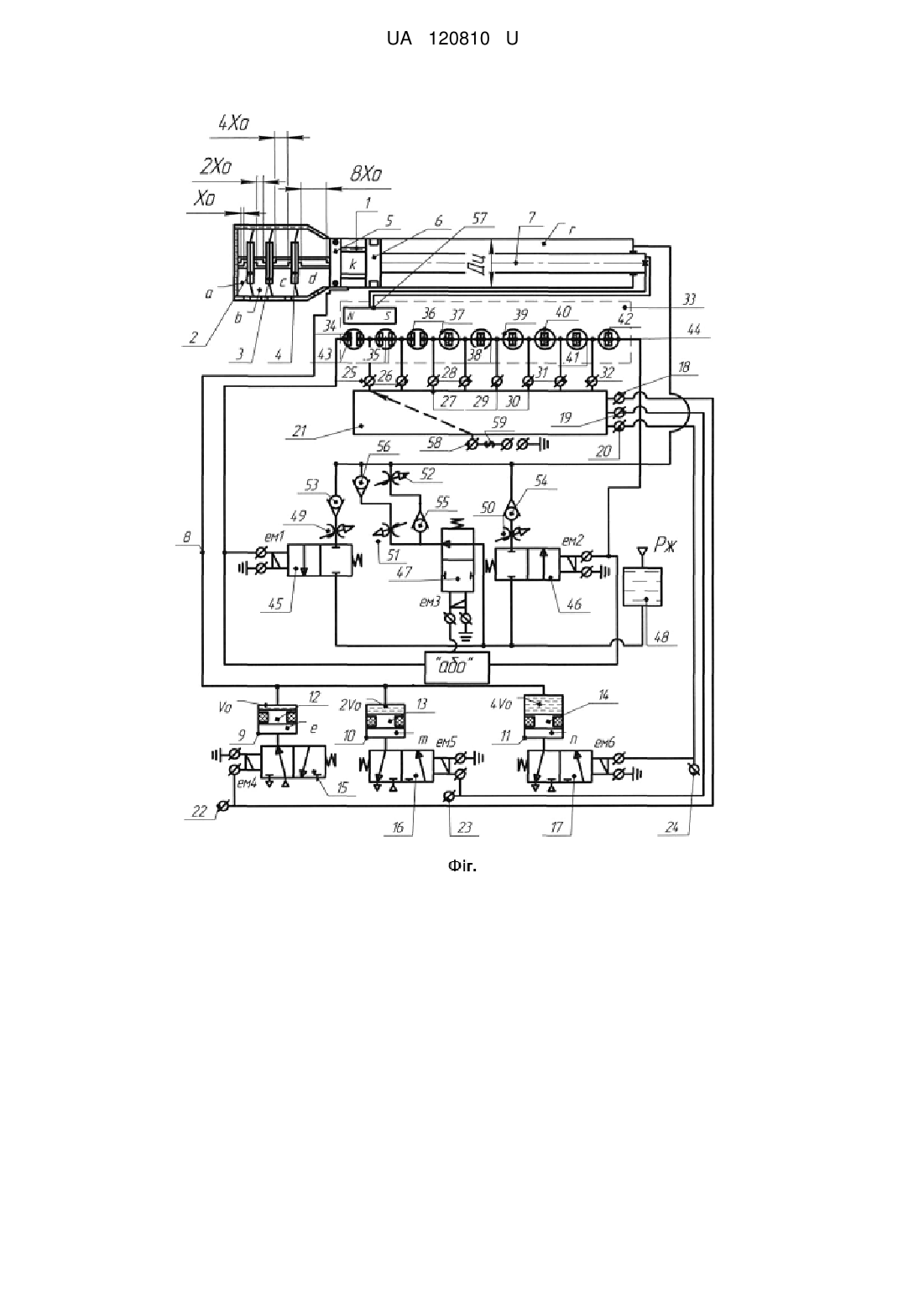
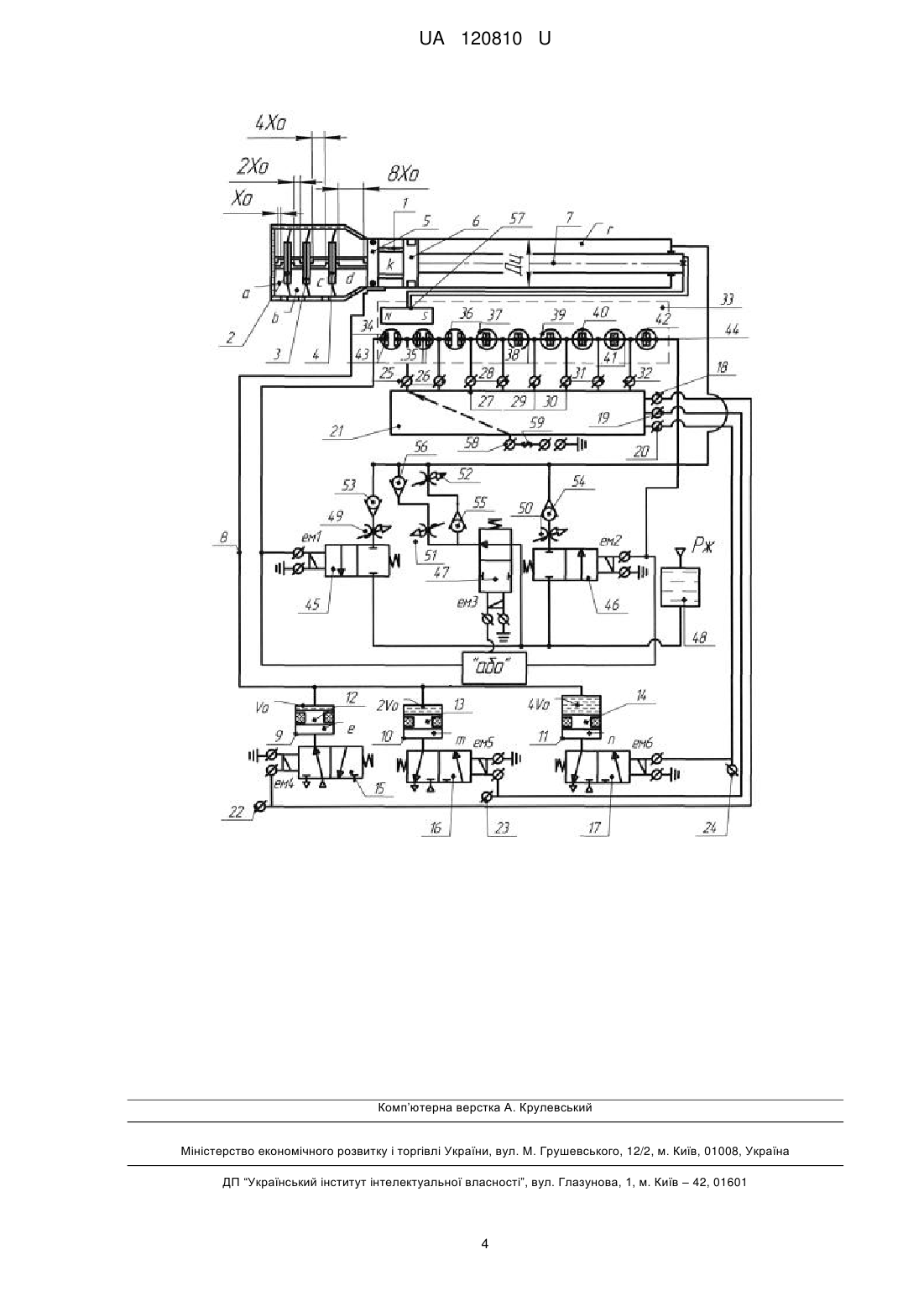
Реферат: Комбінований багатопозиційний привод з цифровим керуванням містить виконавчий циліндр з послідовно розміщеними в ньому розрядними мембранами з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють штокову камеру, яка сполучена з гідрокамерами розрядних гідравлічних дозаторів, пневматичні камери яких сполучені з вихідними каналами пневматичних двопозиційних розподільників з одностороннім електричним керуванням, контакти електромагнітів яких примкнені до керуючих контактів електромагнітного дешифратора, вихідні контакти якого сполучені з вхідними контактами датчика лінійного переміщення, виконаного у вигляді ланцюга нормально замкнених герметичних контактів (герконів) і вихідних контактів та закріпленого на штоці розмикача, виконаного у вигляді магніту довжиною, більшою за величину кроку розміщення герметичних контактів. Штокова камера зворотного руху виконавчого циліндра сполучена через зворотні клапани і дроселі з вихідними каналами трьох двопозиційних дволінійних з одностороннім електричним керуванням гідравлічних розподільників, вхідні канали яких з'єднані з гідравлічною камерою пневмогідравлічного акумулятора. Електричні контакти магнітів двох розподільників підключені до вихідних контактів датчика лінійного переміщення і до вхідних контактів логічного елемента АБО, вихідний контакт якого підключений до котушки електромагніта третього гідравлічного розподільника. UA 120810 U (12) UA 120810 U UA 120810 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв автоматики і може бути використана як пристрій для дискретного позиціонування робочих органів верстатів, промислових роботів, у зварювальному та складальному виробництві, в станціях наведення ракет та в інших механізмах. Відома конструкція комбінованого цифрового пристрою [1], що містить циліндр з послідовно розміщеними в ньому розрядними поршнями з обмежувачами відносного переміщення, об'ємні гідравлічні дозатори, акумулятор і дроселі зі зворотними клапанами. Недоліком такого приводу є те, що при перемиканні розрядних камер в русі вихідного штока можуть виникати незапрограмовані переміщення, так звані "викиди" і "провали". Крім того у такого приводу відсутня можливість гальмування вихідного штока. Все це понижає надійність і обмежує область застосування такого приводу. Найбільш близьким аналогом, прийнятим за прототип, вибрана конструкція пневмогідравлічного цифрового приводу [2]. Такий привід містить виконавчий циліндр з розміщеними в ньому поршнем і вихідним штоком, гідравлічні об'ємні дозатори, гідравлічні камери яких сполучені через дроселі зі зворотними клапанами, і трипозиційний шестилінійний гідравлічний розподільник з двостороннім електричним керуванням з гідравлічною камерою виконавчого циліндра, датчик лінійного переміщення, дешифратор і двопозиційні пневматичні розподільники. Недоліком такого цифрового приводу є те, що рідина надходить в поршневу камеру виконавчого циліндра від дозаторів через складний шестилінійний розподільник, при цьому може втрачатися частина рідини, що веде до пониження точності позиціонування вихідного штока в процесі роботи. Крім того, в такого приводу обмежений діапазон позиціонування, який визначається по залежності N 2n , де n - число об'ємних дозаторів. Все це звужує область застосування таких приводів. В основу корисної моделі поставлена задача підвищення точності позиціонування, спрощення конструкції і розширення діапазону позиціонування вихідного штока. Все це дозволить розширити область застосування таких приводів. Поставлена задача вирішується тим, що в комбінованому багатопозиційному приводі з цифровим керуванням, що містить виконавчий циліндр з послідовно розміщеними в ньому розрядними мембранами з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють штокову камеру зворотного руху і гідравлічну міжпоршневу камеру, яка сполучена з гідрокамерами розрядних гідравлічних дозаторів, пневматичні камери яких сполучені з вихідними каналами пневматичних двопозиційних розподільників з одностороннім електричним керуванням, контакти електромагнітів яких примкнені до керуючих контактів електричного дешифратора, вихідні контакти якого сполучені з контактами датчика лінійного переміщення, виконаного у вигляді ланцюга нормально замкнених герметичних контактів (герконів) і вихідних контактів та закріпленого на штоці розмикача, виконаного у вигляді магніту довжиною, більшою за величину кроку розміщення герметичних контактів, згідно з корисною моделлю, штокова камера зворотного руху виконавчого циліндра сполучена через зворотні клапани і дроселі з вихідними каналами трьох двопозиційних дволінійних з одностороннім електричним керуванням гідравлічних розподільників, вхідні канали яких з'єднані з гідравлічною камерою пневмогідравлічного акумулятора, при цьому електричні контакти магнітів двох розподільників підключені до вихідних контактів датчика лінійного переміщення і до вхідних контактів логічного елемента АБО, вихідний контакт якого підключений до котушки електромагніта третього гідравлічного розподільника. Суть корисної моделі пояснюється кресленням, де на кресленні показана схема комбінованого багатопозиційного приводу з цифровим керуванням. Комбінований багатопозиційний привод з цифровим керуванням складається з виконавчого циліндра 1, в якому послідовно розміщені розрядні мембрани 2, 3, 4 і додатковий розрядний поршень 5 з обмежувачами відносного переміщення та поршень 6 з вихідним штоком 7. Розрядні мембрани, додатковий поршень та поршень з вихідним штоком утворюють розрядні мембранні камери a, b, c, d, гідравлічну камеру k і штокову камеру r. Гідравлічна камера k каналом 8 сполучена з гідравлічними камерами об'ємних дозаторів 9, 10 і 11 з об'ємами рідини відповідно V0 , 2V0 і 4 V0 . Розміщені в дозаторах поршні 12, 13 і 14 утворюють розрядні пневматичні камери e, m і n, які каналами живлення сполучені з вихідними каналами пневматичних розподільників 15, 16 і 17. Контакти електромагнітів ем1, ем2 і ем3 розподільників 15, 16 і 17 і контакти 18, 19 і 20 електричного дешифратора 21 з'єднані з контактами 22, 23 і 24 програмного пристрою (на схемі не показаний). Вихідні контакти 25…32 дешифратора 21 з'єднані з вхідними контактами датчика лінійного переміщення 33, який виконаний у вигляді ланцюга нормально замкнених контактів (герконів) 34…42, вихідні контакти якого 43 і 44 з'єднані з контактами електромагнітів ем1, ем2 розподільників 45, 46 і з вхідними контактами логічного елемента АБО, вихідний контакт якого з'єднаний з контактом електромагніта ем3 третього 1 UA 120810 U 5 10 15 20 25 30 розподільника 47. Вхідні канали розподільників 45, 46 і 47 сполучені з гідравлічною камерою акумулятора 48, до пневматичної камери якого підводиться тиск живлення Рж. Вихідні канали розподільників 45, 46 і 47 через дроселі 49, 50, 51, 52, зворотні клапани 53, 54, 55 і 56 сполучені з гідравлічною камерою k виконавчого циліндра 1. Шток 7 кінематично сполучений з магнітом 57 датчика лінійного переміщення 33. Вхідний контакт 58 дешифратора 21 з'єднаний з джерелом струму 59. Комбінований багатопозиційний привод з цифровим керуванням працює наступним чином. У вихідному положенні електромагніти ем1…ем6 розподільників 15, 16, 17 і 45, 46, 47 знеструмлені. При цьому розрядні камери а, b, с, d, e, m і n з'єднані з атмосферою, що відповідає опрацьованій комбінації керуючих сигналів 0000000. Вихідний шток 7 під дією тиску, що підводиться до штокової камери r через розподільник 47, дросель 51 і зворотний клапан 56 від акумулятора 48 знаходиться в лівому крайньому положенні. При цьому магніт 57 датчика переміщення 33 розмикає контакти герконів 34 і 35. При опрацюванні, наприклад, кодової комбінації керуючих сигналів 0000001 (тиск живлення подається тільки в камеру а) вихідний шток 7 переміщується праворуч (за кресленням) на величину X 0 . При цьому рідина із камери r витісняється в акумулятор 48 через дросель 52, зворотний клапан 55 і розподільник 47. Швидкість руху штока 7 при цьому регулюється дроселем 52. При опрацюванні кодової комбінації керуючих сигналів, наприклад 0110011 (тиск живлення одночасно подається до камер a, b і до камер e, m гідравлічних дозаторів від розподільників 15, 16, на електромагніти яких подається напруга) одночасно напруга, що подається на електромагніти ем1 і ем2 розподільників від контактів 22 і 23 вона підводиться і до керуючих контактів 18, 19 дешифратора 21, який перемикається і його вхідний контакт 58 замикається з вихідним контактом 28. При цьому напруга від контакту 28 по ланцюгу нормально замкнутих контактів герконів 38…42, контакт 44 передається на електромагніт ем2 розподільника 46, який перемикається ліворуч (за кресленням) і з'єднує штокову камеру r через зворотний клапан 54 і дросель 50 з гідрокамерою акумулятора 48. Одночасно з цим напруга від контакту 44 подається на вхідний контакт елемента АБО, який перемикається і напруга від його вихідного контакту подається на електромагніт ем3, розподільника 47, який перемикається вверх (за кресленням) і запирає канали. Після перемикання розподільників 15, 16 і подачі тиску живлення в мембранні камери a, b поршень 6 з вихідним штоком 7 переміщується праворуч на величину 4V0 8V0 X X0 2X0 X0 2X0 16 X0 32 X0 51X0 , 2 2 Дц Дц 4X0 ; Д ц - діаметр поршня 6. 2 Д ц В кінці переміщення штока 7 магнітним полем магніту 57, розмикаються контакти геркона 38, що призводить до знеструмлення електромагнітів ем2 і ем3 розподільників 46 і 47, при цьому розподільник 46 запирається, а розподільник 47 відкривається і рідина із камери г надходить в камеру акумулятора 48 через дросель 52, яким регулюється швидкість гальмування. Швидкість швидкого руху штока 7 праворуч регулюється дроселем 50. При з'єднанні камер а, b, e і m з атмосферою, що відповідає кодовій комбінації керуючих сигналів 0000000 одночасно з цим перемикається і дешифратор 21, при цьому від його вхідного контакту 58 напруга подається на контакт 25, від якого напруга через нормально замкнений геркон 34 і контакт 43 передається на електромагніт ем1 розподільника 45 і на вхідний контакт елемента АБО, який перемикається і подає напругу на електромагніт ем3 розподільника 47. Розподільник 47 перемикається і замикає вхідний і вихідний канали. При перемиканні розподільника 45 рідина під тиском Рж із акумулятора 48 через послідовно увімкнені розподільник 45, дросель 49 і зворотний клапан 53 надходить в камеру r циліндра 1. Під дією тиска в камері r шток 7 з поршнем 6 рухаються ліворуч, витискаючи рідину із камери k в розрядні камери e і m гідродозаторів 9 і 10. При цьому швидкість зворотного руху штока регулюється дроселем 49. В кінці переміщення штока 7 ліворуч магнітним полем магніту 57 розмикається контакт геркона 34, що веде до знеструмлення електромагнітів ем1 і ем3 розподільників 45 і 47, які перемикаються і рідина в кінці руху штока 7 із камери гідроакумулятора надходить в камеру r циліндра 1 через дросель 51, яким регулюється швидкість гальмування в кінці хода. Аналогічно працює привод і при опрацюванні інших кодових комбінацій керуючих сигналів. В загальному випадку величина переміщення вихідного штока при перемиканні кодових комбінацій керуючих сигналів визначається по залежності: де V0 35 40 45 50 2 UA 120810 U 5 10 15 20 25 X X0 n1Bi 2i1 , де X 0 - дискретність цифрового приводу; i - порядковий номер розрядної i камери; B i значуща цифра, яка приймає значення "1", коли тиск живлення підводиться до і-тої розрядної камери і значення - "0", коли i-та камера з'єднується з атмосферою. Максимальне число позицій вихідного штока 7 N 2n 27 128 (позицій), де n - число розрядних камер Максимальна величина переміщення вихідного штоку Xmax X0 (2n 1) X0 127 (мм) . Завдяки включенню в структуру привода акумулятора, від якого рідина через двопозиційні розподільники і дроселі зі зворотними клапанами надходить в штокову камеру виконавчого циліндра, виникає можливість підвищити точність, так як втрата рідини, що надходить в штокову камеру від гідравлічних розподільників не впливає на точність позиціонування вихідного штока, а заміна трипозиційного шестилінійного гідравлічного розподільника на двопозиційні дволінійні розподільники обумовлює спрощення конструкції, так як двопозиційні гідророзподільники масово виготовляються підприємствами, а трипозиційні шестилінійні розподільники даної схеми перемикання каналів підприємствами не випускаються, вони вимагають оригінальної розробки. Запропонована схема керування двопозиційними гідравлічними розподільниками, датчиком лінійного переміщення і дешифратором дає можливість запобігати виникненню "викидів" і "провалів" вихідного штока і регулювання як шляхової швидкості руху, так і гальмування швидкості при підході штока в задану позицію. Крім того, розміщення у виконавчому циліндрі додаткових розрядних камер з мембранами розширює діапазон позиціонування вихідного штока. Все це дає можливість значно розширити область застосування даних приводів Джерела інформації: 1. Патент України № 44656. Комбінований цифровий привід. МПК(2009) П5В11/00.Бюл. № 19, опубл. 12.10.2009 р. 2. Патент України № 93441. Пневмогідравлічний цифровий привід. МПК F15B11/02 (2011.01). Бюл. № 3, опубл. 10.02.2011 р. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 Комбінований багатопозиційний привід з цифровим керуванням, що містить виконавчий циліндр з послідовно розміщеними в ньому розрядними мембранами з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють штокову камеру, яка сполучна з гідрокамерами розрядних гідравлічних дозаторів, пневматичні камери яких сполучені з вихідними каналами пневматичних двопозиційних розподільників з одностороннім електричним керуванням, контакти електромагнітів яких примкнені до керуючих контактів електромагнітного дешифратора, вихідні контакти якого сполучені з вхідними контактами датчика лінійного переміщення, виконаного у вигляді ланцюга нормально замкнених герметичних контактів (герконів) і вихідних контактів та закріпленого на штоці розмикача, виконаного у вигляді магніту довжиною, більшою за величину кроку розміщення герметичних контактів, який відрізняється тим, що штокова камера зворотного руху виконавчого циліндра сполучена через зворотні клапани і дроселі з вихідними каналами трьох двопозиційних дволінійних з одностороннім електричним керуванням гідравлічних розподільників, вхідні канали яких з'єднані з гідравлічною камерою пневмогідравлічного акумулятора, при цьому електричні контакти магнітів двох розподільників підключені до вихідних контактів датчика лінійного переміщення і до вхідних контактів логічного елемента АБО, вихідний контакт якого підключений до котушки електромагніта третього гідравлічного розподільника. 3 UA 120810 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F15B 11/00, F15B 11/02
Мітки: цифровим, керуванням, привід, комбінований, багатопозиційний
Код посилання
<a href="https://ua.patents.su/6-120810-kombinovanijj-bagatopozicijjnijj-privid-z-cifrovim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Комбінований багатопозиційний привід з цифровим керуванням</a>
Багатопозиційний поворотний привід з цифровим керуванням
Номер патенту: 35218
Опубліковано: 10.09.2008
Автори: Кучерук Юрій Миколайович, Новік Микола Андрійович
МПК: F15B 7/00
Мітки: керуванням, поворотний, багатопозиційний, цифровим, привід
Формула / Реферат:
1. Багатопозиційний поворотний привід з цифровим керуванням, що містить циліндри повороту і зворотного повороту, поршні яких утворюють робочі камери і з'єднані із зубчастими рейками, що зчіплюються із вихідною шестірнею, гідравлічні дозатори, з розміщеними в них поршнями з утворенням робочих і гідравлічних камер, який відрізняється тим, що гідравлічні камери дозаторів сполучені з вхідними каналами зворотного клапана з дроселем, вихідні канали...
Багатопозиційний поворотний привод з цифровим керуванням
Номер патенту: 101924
Опубліковано: 12.10.2015
Автори: Лук'янов Анатолій Михайлович, Новік Микола Андрійович
МПК: F15B 7/00
Мітки: привод, поворотний, багатопозиційний, керуванням, цифровим
Формула / Реферат:
Багатопозиційний поворотний привод з цифровим керуванням, що містить паралельно розміщені однопоршневий циліндр і цифровий двигун, виконаний у вигляді послідовно розміщених розрядних поршнів з утворенням розрядних камер та камери зворотного руху розрядних поршнів і поворотний вихідний вал, який відрізняється тим, що камера зворотного руху розрядних поршнів сполучена з вхідним каналом двопозиційного дволінійного гідравлічного розподільника,...
Багатопозиційний комбінований привод
Номер патенту: 109193
Опубліковано: 27.07.2015
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович
МПК: F15B 11/02, F15B 9/02, F15B 7/06, F15B 11/12
Мітки: привод, багатопозиційний, комбінований
Формула / Реферат:
Багатопозиційний комбінований привод, що містить виконавчий циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком, утворені розміщеними в циліндрах розрядними поршнями гідравлічні об'ємні дозатори і додатковий поршень зі штоком, кінематично сполученим з вихідним валом електричного крокового двигуна, який відрізняється тим, що вихідний канал гідравлічних об'ємних дозаторів з'єднаний з вхідним каналом...
Багатопозиційний комбінований привод

Номер патенту: 97234
Опубліковано: 10.03.2015
Автори: Новік Микола Андрійович, Лук'янов Анатолій Михайлович, Дідовець Вячеслав Євгенійович
МПК: F15B 11/02
Мітки: багатопозиційний, комбінований, привод
Формула / Реферат:
Багатопозиційний комбінований привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини, розміщені в циліндрі поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового...
Комбінований цифровий привід
Номер патенту: 44656
Опубліковано: 12.10.2009
Автори: Кучерук Юрій Миколайович, Новік Микола Андрійович
МПК: F15B 11/00
Мітки: цифровий, привід, комбінований
Формула / Реферат:
1. Комбінований цифровий привід, що містить циліндр з послідовно розміщеними в ньому розрядними поршнями з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють камеру зворотного руху і гідравлічну міжпоршневу камеру, яка сполучена з гідравлічними камерами розрядних гідравлічних дозаторів, який відрізняється тим, що в циліндрі закріплена додаткова перегородка з плунжером, який розміщений в осьовій розточці вихідного...
Попередній патент: Комбікорм для плідників коропа у переднерестовий період
Наступний патент: Газовідвід електродугової печі
Випадковий патент: Ваговимірювальний датчик