Багатопозиційний поворотний привод з цифровим керуванням
Номер патенту: 101924
Опубліковано: 12.10.2015
Автори: Лук'янов Анатолій Михайлович, Новік Микола Андрійович
Формула / Реферат
Багатопозиційний поворотний привод з цифровим керуванням, що містить паралельно розміщені однопоршневий циліндр і цифровий двигун, виконаний у вигляді послідовно розміщених розрядних поршнів з утворенням розрядних камер та камери зворотного руху розрядних поршнів і поворотний вихідний вал, який відрізняється тим, що камера зворотного руху розрядних поршнів сполучена з вхідним каналом двопозиційного дволінійного гідравлічного розподільника, вихідний канал якого сполучений через дроселі і зворотно увімкнені зворотні клапани з гідравлічною камерою пневмогідравлічного акумулятора, а до поршня старшого розряду цифрового двигуна жорстко прикріплений кінець гнучкого штока, який через отвір в передній кришці цифрового двигуна виходить за її межі, охоплює по колу циліндричну поверхню вихідного вала з можливістю передачі крутного моменту і своїм іншим кінцем, який проходить через осьовий отвір в передній кришці однопоршневого циліндра жорстко прикріплений до його поршня.
Текст
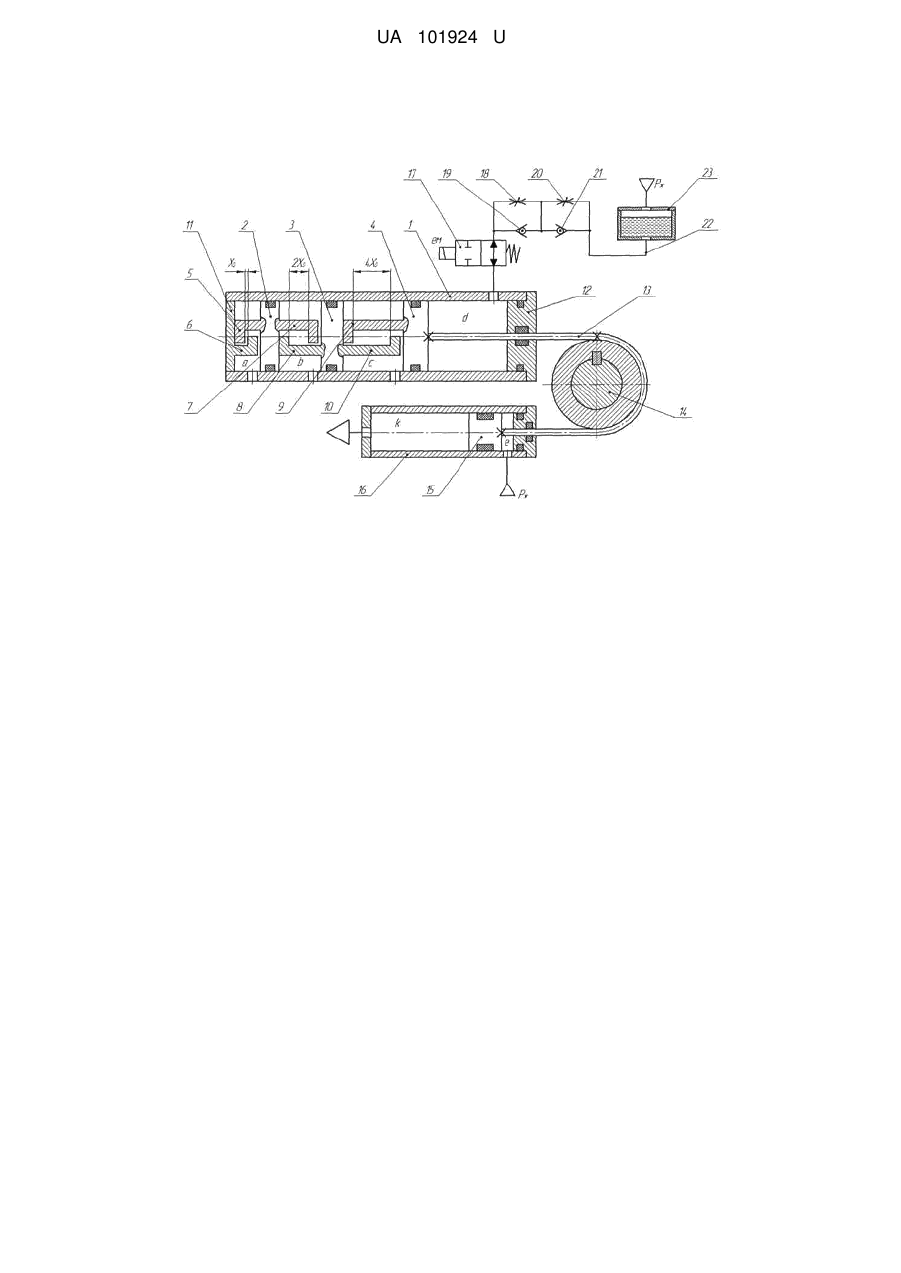
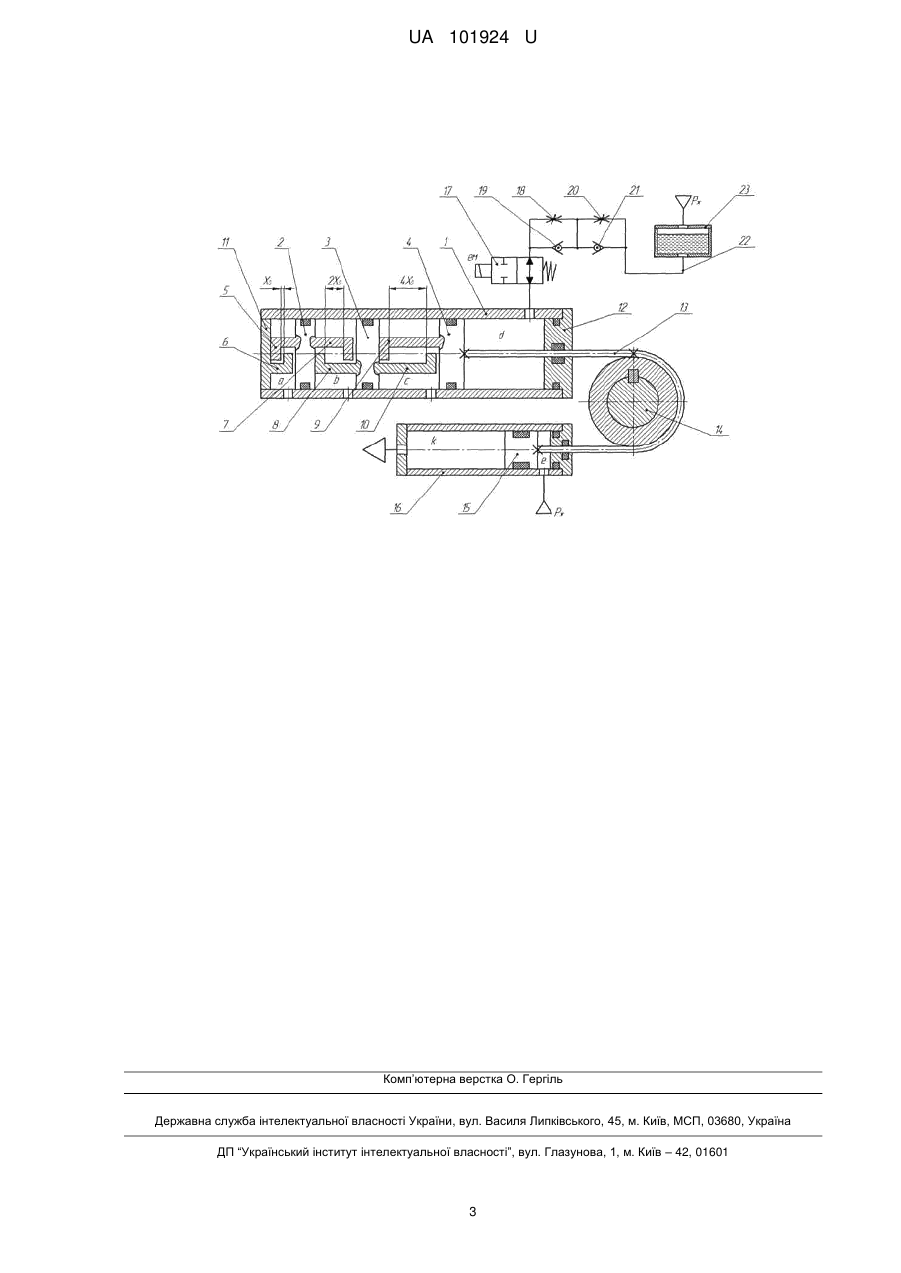
Реферат: UA 101924 U UA 101924 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв автоматики і може бути використана як приводи металорізальних верстатів, промислових роботів, зварювальному виробництві, при виконанні складальних робіт та в інших механізмах з дискретним позиціюванням вихідної ланки. Відомий поворотний цифровий привод, що містить вал, на якому послідовно розміщені розрядні секції і секції зворотного повороту з робочими камерами і каналами живлення при цьому розрядні секції виконані у вигляді циліндрів однобічної дії з цифровим кроком, поршні яких з'єднані з зубчастими рейками, які зчіплюються з шестернями, послідовно розміщеними з можливістю повороту на валу [1]. Недоліком відомого пристрою є складність конструкції, яка обумовлюється великою кількістю секцій, які виконані у вигляді зачеплення рейка-шестерня. Недоліком є також те, що тиск живлення до розрядних секцій підводиться по гнучким трубопроводам, а в процесі перемикання розрядних камер секцій можуть виникати незапрограмовані повороти вихідної ланки, що обмежує область застосування таких приводів. Найближчим аналогом є конструкція багатопозиційного поворотного приводу з цифровим керуванням [2], що містить циліндри прямого і зворотного повороту, поршні яких утворюють робочі камери і з'єднання із зубчастими рейками, що зчіплюються з вихідною шестернею, гідравлічні регульовані дозатори, зворотні клапани і регульовані дроселі. Недоліком такого приводу є те, що в процесі роботи внаслідок втрати робочої рідини із дозаторів, точність позиціювання вихідної шестерні (ланки) зменшується, а в процесі перемикання розрядних камер можливі незапрограмовані рухи вихідної ланки, що обумовлює обмеження області застосування таких приводів. В основу корисної моделі поставлена задача підвищення точності позиціювання і розширення області застосування багатопозиційного поворотного привода з цифровим керуванням. Поставлена задача вирішується тим, що в багатопозиційному поворотному приводі з цифровим керуванням, що містить паралельно розміщені однопоршневий циліндр і цифровий двигун, виконаний у вигляді послідовно розміщених розрядних поршнів з утворенням розрядних камер та камери зворотного руху розрядних поршнів і поворотний вихідний вал, камеру зворотного руху розрядних поршнів, що сполучена з вхідним каналом двопозиційного дволінійного гідравлічного розподільника, вихідний канал якого сполучений через дроселі і зворотно увімкнені зворотні клапани з гідравлічною камерою пневмогідравлічного акумулятора, а до поршня старшого розряду цифрового двигуна жорстко прикріплений кінець гнучкого штока, який через отвір в передній кришці цифрового двигуна виходить за її межі, охоплює по колу циліндричну поверхню вихідного вала з можливістю передачі крутного моменту і своїм іншим кінцем, який проходить через осьовий отвір в передній кришці однопоршневого циліндра жорстко прикріплений до його поршня. Завдяки тому, що переміщення розрядних поршнів цифрового двигуна обмежується жорсткими упорами досягається висока точність і повторюваність позиціювання вихідного вала. Включення в структуру приводу двопозиційного дволінійного гідравлічного запираючого розподільника дозволяє запобігти виниканню при перемиканні розрядних камер незапрограмованих рухів вихідного вала, а кінематичний зв'язок між поршнями циліндрів і вихідним валом, який виконаний у вигляді гнучкого штока дозволяє спростити конструкцію приводу. Все це дозволяє підвищити як точність позиціювання, поліпшення динамічних характеристик, так і спрощення конструкції і розширити область застосування таких приводів. Суть корисної моделі пояснюється кресленням, на якому показана схема багатопозиційного поворотного приводу з цифровим керуванням. Багатопозиційний поворотний привод з цифровим керуванням містить цифровий двигун, який виконаний у вигляді циліндра 1, в якому послідовно розміщені розрядні поршні 2, 3, 4 з обмежуваними відносного переміщення 5, 6, 7, 8, 9 і 10. Розрядні поршні 2, 3, 4 циліндр 1 і кришки 11, 12 утворюють розрядні камери а, b, с і камеру зворотного руху розрядних поршнів d. Величини переміщення розрядних поршнів 2, 3, 4 відповідно дорівнюють Х 0, 2X0 і 4X0. Поршень старшого розряду 4 гнучким штоком 13 з'єднаний жорстко з вихідним валом 14 і поршнем 15 циліндра 16, до камери e циліндра 16 постійно підводиться тиск живлення РЖ, а камера k з'єднана з атмосферою. Камера d цифрового двигуна сполучена з вихідним каналом гідравлічного запираючого розподільник 17, вихідний канал якого сполучений з дроселем 18 і зворотним клапаном 19, вихідні канали яких з'єднані з каналами дроселя 20 і зворотного клапана 21. Живлячі канали дроселя 20 і зворотного клапана 21 з каналом 22 з'єднані з гідравлічною камерою пневмогідравлічного акумулятора 23, до пневматичної камери якого підводиться постійно тиск живлення РЖ. 1 UA 101924 U 5 10 15 20 25 30 35 Принцип дії багатопозиційного поворотного приводу з цифровим керуванням полягає в наступному. У вихідному положенні тиск живлення РЖ одночасно підводиться до камери e циліндра 16 і до пневматичної камери акумулятора 23, електромагніт ем гідравлічного розподільника 17 знеструмлений. Під дією тисків у камері є циліндра 16 і у камері d циліндра 1 поршні 2, 3, 4 і 15 займають вихідне положення внаслідок чого вихідний вал 14 також займає вихідне положення. При подачі тиску живлення РЖ, наприклад, в розрядну камеру а (що відповідає опрацюванню комбінації керуючих сигналів 001) поршень 2 під дією тиску переміщується праворуч (за кресленням) на величину Х 0, при цьому поршень старшого розряду 4 також переміщується праворуч на величину Х0. Внаслідок переміщення праворуч поршня 4 вихідний вал 14 повертається за годинниковою стрілкою на кут φ0. При цьому величина крутного моменту забезпечується тиском РЖ в камері e, який діє на поршень 15. При переміщенні поршня 4 праворуч рідина із камери d витісняється в акумулятор 23 через розподільник 17, клапан 19, дросель 20, яким регулюється швидкість повороту вала 14. При з'єднанні камери а з атмосферою (що відповідає кодовій комбінації 000) під дією тиску в камері d поршень 2 та 4 переміщуються ліворуч у вихідне положення, при цьому вал 14 повертається у зворотному напрямку на кут φ0. При переміщенні поршня 4 ліворуч рідина із гідравлічної камери акумулятора 23 через зворотний клапан 21, дросель 18 і розподільник 17 поступає у камеру d, при цьому швидкість повороту вала проти годинникової стрілки регулюється дроселем 18. При опрацюванні, наприклад, кодової комбінації 010 вихідний вал 14 повертається на кут 2φ0. Комбінації керуючих сигналів 011 відповідає поворот вихідного вала 14 на кут 3φ0 і т.д. Максимальний кут повороту вихідного вала відповідає комбінації керуючих сигналів 111 і n дорівнює 7φ0. Число позицій вихідного вала визначається по формулі N=2 , де n - число розрядних поршнів. При перемиканні розрядних камер, наприклад, з комбінації 010 на 100 (тобто одночасно камера b з'єднується з атмосферою, а в камеру с подається тиск живлення РЖ) спочатку подається напруга на електромагніт ем, при цьому розподільник 17 перемикається праворуч і запирає камеру d циліндра 1. Під дією тиску в камері с поршень 3 переміщується ліворуч на величину 2X0. Після переміщення поршня 3 на величину 2X0 знеструмлюється електромагніт ем, розподільник 17 перемикається ліворуч, при цьому під дією тиску в камері с поршень 4 переміщується праворуч на величину 2X0. Внаслідок цього, вихідний вал повертається на кут 2φ0. Аналогічно привод працює і при перемиканні інших комбінацій керуючих сигналів. Таким чином, запропонований багатопозиційний поворотний привод з цифровим керуванням характеризується високою точністю позиціювання вихідного вала, можливістю регулювання швидкості повороту, простотою конструкції і відсутністю незапрограмованих рухів вихідного вала при перемиканні керуючих сигналів. Для забезпечення однакового крутного моменту як при повороті вихідного вала за годинниковою стрілкою, так і в зворотному напрямку необхідно, щоб ефективна площа поршня 4 зі сторони камери d була у двічі більша за ефективну площу поршня 15 зі сторони камери є. 40 45 Джерела інформації: 1. Патент України на корисну модель "Поворотний цифровий привод" № 35492 МПК(2006) F15B 11/00,опубл. 25.09.2008. 2. Патент України на корисну модель "Багатопозиційний поворотний привод з цифровим керуванням" № 35218 МПК (2006) F15B 7/00, опубл.10.09.2008. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Багатопозиційний поворотний привод з цифровим керуванням, що містить паралельно розміщені однопоршневий циліндр і цифровий двигун, виконаний у вигляді послідовно розміщених розрядних поршнів з утворенням розрядних камер та камери зворотного руху розрядних поршнів і поворотний вихідний вал, який відрізняється тим, що камера зворотного руху розрядних поршнів сполучена з вхідним каналом двопозиційного дволінійного гідравлічного розподільника, вихідний канал якого сполучений через дроселі і зворотно увімкнені зворотні клапани з гідравлічною камерою пневмогідравлічного акумулятора, а до поршня старшого розряду цифрового двигуна жорстко прикріплений кінець гнучкого штока, який через отвір в передній кришці цифрового двигуна виходить за її межі, охоплює по колу циліндричну поверхню вихідного вала з можливістю передачі крутного моменту і своїм іншим кінцем, який проходить через осьовий отвір в передній кришці однопоршневого циліндра жорстко прикріплений до його поршня. 2 UA 101924 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F15B 7/00
Мітки: привод, цифровим, поворотний, керуванням, багатопозиційний
Код посилання
<a href="https://ua.patents.su/5-101924-bagatopozicijjnijj-povorotnijj-privod-z-cifrovim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Багатопозиційний поворотний привод з цифровим керуванням</a>
Багатопозиційний поворотний привід з цифровим керуванням
Номер патенту: 35218
Опубліковано: 10.09.2008
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: привід, багатопозиційний, керуванням, поворотний, цифровим
Формула / Реферат:
1. Багатопозиційний поворотний привід з цифровим керуванням, що містить циліндри повороту і зворотного повороту, поршні яких утворюють робочі камери і з'єднані із зубчастими рейками, що зчіплюються із вихідною шестірнею, гідравлічні дозатори, з розміщеними в них поршнями з утворенням робочих і гідравлічних камер, який відрізняється тим, що гідравлічні камери дозаторів сполучені з вхідними каналами зворотного клапана з дроселем, вихідні канали...
Багатопозиційний комбінований привод

Номер патенту: 97234
Опубліковано: 10.03.2015
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович, Лук'янов Анатолій Михайлович
МПК: F15B 11/02
Мітки: багатопозиційний, привод, комбінований
Формула / Реферат:
Багатопозиційний комбінований привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини, розміщені в циліндрі поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового...
Багатопозиційний привод
Номер патенту: 90383
Опубліковано: 26.04.2010
Автори: Дорогань Володимир Васильович, Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: привод, багатопозиційний
Формула / Реферат:
1. Багатопозиційний привод, який містить циліндр з вихідним штоком, передню і задню кришки, в якому послідовно розміщено поршні з обмежувачами відносного переміщення, що утворюють розрядні порожнини і порожнину зворотного руху поршнів з каналами живлення, який відрізняється тим, що поршень молодшого розряду жорстко з'єднаний з додатковим штоком, який через отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з...
Багатопозиційний пневмоелектричний привод
Номер патенту: 73494
Опубліковано: 25.09.2012
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
МПК: F15B 11/02
Мітки: привод, багатопозиційний, пневмоелектричний
Формула / Реферат:
Багатопозиційний пневмоелектричний привод, що містить циліндр, в якому з утворенням поршневої і штокової порожнин розміщений поршень з вихідним штоком і додатковий поршень зі штоком, кінематично сполученим з валом електричного крокового двигуна, та гідравлічні об'ємні дозатори, який відрізняється тим, що додатковий поршень зі штоком з утворенням гідравлічної та компенсуючої порожнин розміщений з можливістю поступального руху в одному із...
Багатопозиційний привод
Номер патенту: 63275
Опубліковано: 10.10.2011
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович
МПК: F15B 7/00
Мітки: привод, багатопозиційний
Формула / Реферат:
Багатопозиційний привод, що містить циліндр з передньою і задньою кришками, в якому з утворенням штокової та сполученої з гідравлічними порожнинами дозаторів міжпоршневої порожнини і компенсаційної порожнини розміщені поршень з вихідним штоком і додатковий поршень зі штоком, який через осьовий циліндричний отвір, виконаний у задній кришці, виходить за її межі і кінематично з'єднаний з вихідним валом крокового двигуна, який відрізняється тим,...
Попередній патент: Зубчаста передача
Наступний патент: Спосіб захисту трифазного електродвигуна від струмових перевантажень
Випадковий патент: Водневостійка аустенітна сталь