Двоступінчастий поршневий пневмопривод
Номер патенту: 122775
Опубліковано: 25.01.2018
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович

Формула / Реферат
Двоступінчастий поршневий привод, що містить циліндр з торцевими кришкою і фланцем, з розміщеним усередині виконавчим поршнем з вихідним штоком, і зрівноважуючу пружину, а також пневмолінію вихідного тиску, приєднану до кришки, який відрізняється тим, що в циліндрі додатково між виконавчим поршнем і кришкою установлений двоступінчастий, з першим і другим підсумовуючими механізмами, перетворювач вхідних сигналів, перший ступінь якого включає перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням ніж кришкою і першим поршнем першої камери сполученої з пневмолінією вхідного тиску через додатково установлений перший регулювальний дросель, між першим, другим, третім рухомими поршнями і зв'язаною з останнім втулкою, камери сполучені безпосередньо, а третя камера між другим, третім рухомими поршнями з втулкою через отвори в циліндри сполучена з атмосферою, при цьому другий ступінь включає нерухомий поршень, зв'язаний з циліндром, четвертий і п'ятий, з'єднані між собою жорсткими тягами, рухомі поршні, з утворенням між нерухомим і четвертим рухомим поршнями четвертої камери, сполученої через пневмолінію і додатково установлений другий регулювальний дросель з перепускною, між третім рухомим і нерухомим поршнями, камерою, між четвертим, п'ятим і виконавчим поршнями, сполученою з проміжною камерою безпосередньо, а шоста камера між п'ятим і виконавчим рухомими поршнями, а також напрямною виконавчого поршня і фланцем циліндра через отвори у напрямній і фланці сполучена з атмосферою, причому підсумовуючий механізм першого ступеня перетворювача виконаний у вигляді третього рухомого поршня, а другого ступеня - у вигляді виконавчого поршня, розміщеного усередині напрямної, з'єднаної з торцевим фланцем циліндра.
Текст
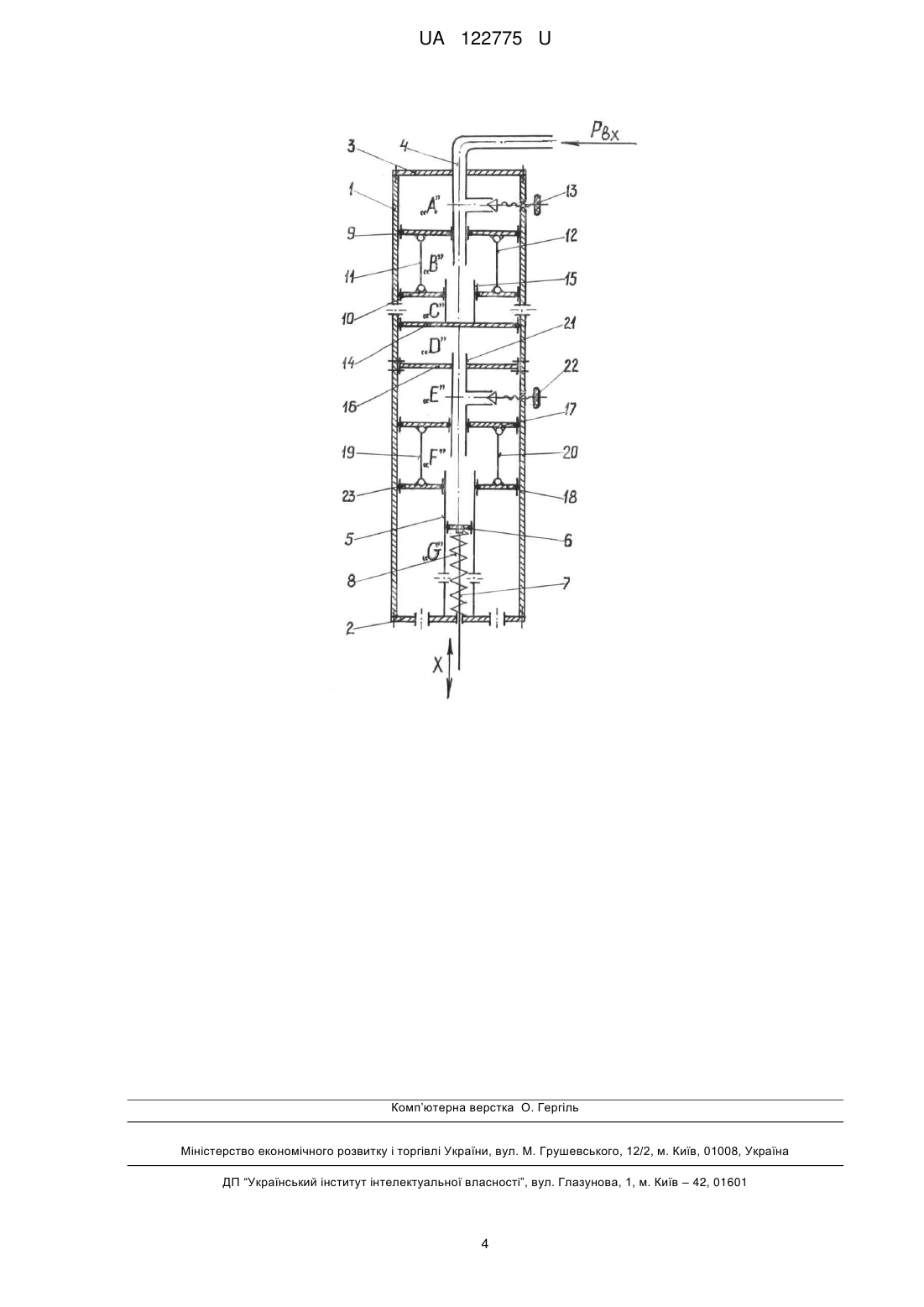
Реферат: Двоступінчастий поршневий привод містить циліндр з торцевими кришкою і фланцем, з розміщеним усередині виконавчим поршнем з вихідним штоком, і зрівноважуючу пружину, а також пневмолінію вихідного тиску, приєднану до кришки, крім того в циліндрі додатково між виконавчим поршнем і кришкою установлений двоступінчастий, з першим і другим підсумовуючими механізмами, перетворювач вхідних сигналів, перший ступінь якого включає перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням ніж кришкою і першим поршнем першої камери, сполученої з пневмолінією вхідного тиску через додатково установлений перший регулювальний дросель, між першим, другим, третім рухомими поршнями і зв'язаною з останнім втулкою, камери сполучені безпосередньо, а третя камера між другим, третім рухомими поршнями з втулкою через отвори в циліндри сполучена з атмосферою, при цьому другий ступінь включає нерухомий поршень, зв'язаний з циліндром, четвертий і п'ятий, з'єднані між собою жорсткими тягами, рухомі поршні, з утворенням між нерухомим і четвертим рухомим поршнями четвертої камери, сполученої через пневмолінію, і додатково установлений другий регулювальний дросель з перепускною, між третім рухомим і нерухомим поршнями, камерою, між четвертим, п'ятим і виконавчим поршнями, сполученою з проміжною камерою безпосередньо, а шоста камера між п'ятим і виконавчим рухомими поршнями, а також напрямною виконавчого поршня і фланцем циліндра через отвори у напрямній і фланці сполучена з атмосферою, причому підсумовуючий механізм першого ступеня перетворювача виконаний у вигляді третього рухомого поршня, а другого ступеня - у вигляді виконавчого поршня, розміщеного усередині напрямної, з'єднаної з торцевим фланцем циліндра. UA 122775 U (54) ДВОСТУПІНЧАСТИЙ ПОРШНЕВИЙ ПНЕВМОПРИВОД UA 122775 U UA 122775 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пневматичних поршневих приводів одинарної дії систем автоматичного регулювання (CAP) або керування (САК), і може бути використана переважно у виконавчих механізмах із значними переміщеннями вихідного штока зрівноважуваного силою пружинної деформації пружини. Відомий, найбільш близьким за суттю і технічною реалізацією, пневматичний поршневий привод одинарної дії, містить циліндр з установленим всередині поршнем з виконавчим вихідним штоком зв'язаним з пружиною зрівноваження сили дії поршня і пневмолінією подачі тиску в циліндр (див. кн. И.А. Ибрагимов, Н.Г. Фарзане, Л.В. Илясов. Элементы и системы пневмоавтоматики. - 2-е изд., перераб. и доп. - М.: Высш. шк., 1985. - С. 493-494, фиг. 12.3, б). Недоліком відомого поршневого приводу є обмежені функціональні можливості формування вихідних виконавчих сигналів, через їх низьку швидкодію понижується точність функціонування і ефективність використання обладнаних ним CAP і САК різних галузей пневмоавтоматики, а також обмежується область його застосування. У зв'язку з цим в основу запропонованого технічного рішення поставлено задачу підвищити швидкодію вихідних сигналів поршневого одинарної дії приводу за рахунок чого підвищити точність функціонування і ефективність використання обладнаних ним CAP і САК, а також розширити область його застосування. З метою підвищення швидкодії вихідних сигналів і ефективності використання пневмоприводу пропонується його удосконалення, суттєві ознаки якого полягають в тому, що вхідний сигнал одержує послідовно двоступеневе перетворення, спочатку на першому ступені формується вихідний сигнал пропорційний швидкості (першій похідній) його змінювання, який далі на другому ступені перетворюється у вихідний сигнал пропорційний прискорюванню (другій похідній) змінювання вхідного сигналу і після пневматичного підсумовування результативний вихідний сигнал поступає на регулюючий орган, при можливому введені в закон регулювання незалежних за величиною складових пропорційних швидкості і прискоренню вхідного сигналу. Для вирішення даної задачі в поршневому пневмоприводі з циліндром з торцевими кришкою і фланцем, розміщеними усередині виконавчим поршнем з вихідним штоком і зрівноважуючою пружиною, а також пневмолінією вхідного тиску, приєднаною до кришки, в циліндрі додатково між виконавчим поршнем і кришкою установлений двоступінчастий, з першим і другим підсумовуючим механізмами, перетворювач вхідних сигналів. Перший ступінь його включає перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між кришкою і першим поршнем першої камери, сполученої з пневмолінією вхідного тиску через додатково установлений перший регулювальний дросель, між першим, другим, третім рухомими поршнями і зв'язаною з останнім втулкою другої камери сполученої безпосередньо, а третя камера між другим, третім рухомими поршнями і втулкою через отвори в циліндрі сполучена з атмосферою. Другий ступінь включає нерухомий поршень, зв'язаний з циліндром, четвертий і п'ятий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між нерухомим і четвертим рухомими поршнями четвертої камери, сполученої через пневмолінію і додатково установлений другий регулювальний дросель з проміжною, між третім рухомим і нерухомим поршнями, камерою, між четвертим, п'ятим і виконавчим поршнями п'ятої, сполученої з проміжною камерою безпосередньо, а шоста камера між п'ятим і виконавчим рухомими поршнями, а також напрямною виконавчого поршня і фланцем циліндра через отвори у напрямній і фланці сполучена з атмосферою. При цьому підсумовуючий механізм першого ступеня перетворювача виконаний у вигляді третього рухомого поршня, а другого ступеня - у вигляді виконавчого поршня, розміщеного усередині напрямної, з'єднаної з торцевим фланцем циліндра. Таке технічне рішення дасть можливість на виході запропонованого двоступінчастого поршневого пневмопривода формувати виконавчий сигнал з додатковими складовими першою пропорційною швидкості (першій похідній) і другою пропорційною прискоренню (другій похідній) від змінювання вхідного сигналу. Ступінь введення в процес формування першої похідної залежить від настроювання першого регулювального дроселя, а другої похідної - від настроювання другого регулювального дроселя, а також геометричних параметрів поршнів першого і другого ступенів. Таким чином, завдяки можливому формуванню вихідного сигналу пропорційного змінюванню вхідного, першій і другій похідним від його змінювання, розширюються функціональні можливості і динамічні властивості запропонованого поршневого пневмопривода, як коригуючої динамічної ланки, при послідовному включенні якої в CAP або САК підвищить точність їх функціонування, а також ефективність використання оснащених ними машин, агрегатів і технологічного обладнання, що розширить область його застосування. 1 UA 122775 U 5 10 15 20 25 30 35 40 45 50 55 60 На представленому кресленні схематично показано загальний вигляд запропонованого двоступінчастого поршневого пневмопривода. Запропонований пневмопривод містить циліндр 1 з фланцем 2, кришкою 3 з приєднаною до неї пневмолінією 4 підведення газу від джерела тиску (на схемі не показано), а до фланця 2 напрямною 5, в якій переміщується виконавчий поршень 6 зі штоком 7 і зрівноважуючого силу виконавчого поршня пружиною 8, розміщеною між поршнем 6 і фланцем 2. Між виконавчим поршнем 6 і кришкою 3 установлений двоступінчастий, з першим і другим підсумовуючими механізмами, перетворювач вхідних сигналів. Перший ступінь перетворювача включає перший 9 і другий 10, зв'язані між собою жорсткими тягами 11, 12, рухомі поршні, з утворенням між кришкою 3 і першим поршнем 9 першої камери "А" сполученої з пневмолінією 4 через додатково установлений перший регулюючий дросель 13, між першим 9, другим 10 і третім 14 рухомими поршнями - другої камери "В" сполученої безпосередньо, а третя камера "С" між другим 10, третім 14 рухомими поршнями і зв'язаною з поршнем 14 циліндричною втулкою 15 через отвори в циліндрі 1 сполучена з атмосферою. Другий ступінь включає нерухомий поршень 16 з'єднаний з циліндром 1, четвертий 17 і п'ятий 18, зв'язані між собою жорсткими тягами 19, 20, рухомі поршні, з утворенням між нерухомим 16 і третім рухомим 17 поршнями четвертої "Е" камери, сполученої через пневмолінію 21 і додатково установлений другий регулювальний дросель 22 з проміжною, між третім 14 рухомим і 16 нерухомим поршнями, камерою "D", між четвертим 17, п'ятим 18 рухомими і виконавчим 6 поршнями п'ятої камери "F" сполученої з проміжною камерою "D" безпосередньо, а шоста камера "G" між п'ятим 18 виконавчим 6 поршнями, а також напрямною виконавчого поршня 6 і фланцем 2 циліндра 1 через отвори у напрямній 5 і у фланці 2 сполучена з атмосферою. Підсумовуючий механізм першого ступеня перетворювача виконаний у вигляді третього рухомого поршня 14, а другого ступеня - у вигляді виконавчого поршня 6, розміщеного усередині напрямної 5 з'єднаної з торцевим фланцем 2 циліндра. Герметичність в порожнинах "А", "В", "Е", "F" забезпечується манжетами 23, установленими на поршнях 6, 9, 10, 14, 17, 18. У вихідне положення виконавчий поршень 6 повертається силою пружної деформації пружини 8. Працює запропонований двоступінчастий поршневий пневмопривод наступним чином. При різкому підвищенні вхідного сигналу (тиску газу "Р вх") через наявність дроселя 13 першого ступеня тиск газу в першій камері "А" зростатиме повільніше ніж в другій камері "В". Внаслідок поршень 9 буде переміщатися догори і за собою переміщатиме поршень 10, зменшуючи об'єм камери "В" і тим самим, створюючи додатковий в ній приріст тиску. При цьому результативний тиск газу на виході першого ступеня перетворювача буде пропорційний змінюванню вхідного тиску і швидкості (першій похідній) його змінювання, який далі через циліндричну втулку 15 і поршень 14 буде передаватися в проміжну камеру "D". З камери "D" газ поступатиме в камери "Е" і "F" другого ступеня. Але через наявність другого дроселя 22 тиск газу в четвертій камері "Е" зростатиме повільніше, ніж в п'ятій камері "F". Від цього поршень 17 буде переміщатися догори і за собою переміщатиме поршень 18, зменшуючи об'єм камери "F" і тим самим створюючи в ній додатковий приріст тиску. При цьому виконавчий поршень 6, зв'язаний з вихідним штоком 7 одержить додаткове переміщення, внаслідок чого буде додаватися три переміщення, тобто вихідний сигнал "X" пневмопривода буде складатися із трьох переміщень, викликаних: - першого - змінюванням вхідного сигналу (підвищення вхідного тиску газу); - другого - швидкістю (першою похідною) його змінювання; - третього прискоренням (другою похідною) його змінювання. Від результативного переміщення вихідного штока 7 донизу пружиною 8 зрівноважиться сила дії виконавчого поршня 6. При різкому пониженні вхідного сигналу "Рвх" запропонований привод працюватиме аналогічно з тією лише різницею, що вихідні переміщення його рухомих деталей будуть направлені в протилежний бік. Отже, як при різкому підвищенні, так і пониженні вхідного тиску запропонований двоступінчастий поршневий пневмопривод буде працювати як підсилювальнодвічідиференціююча (ПДД) динамічна ланка, що забезпечує виконавчому поршню 6 і зв'язаному з ним, через вихідний шток 7, виконавчому органу CAP або САК переміщення пропорційне змінюванню вхідного сигналу і швидкості його змінювання. У випадку повільного змінювання вхідного сигналу "Рвх" в пневмолінії 4 перепад тисків в камерах "А", "В", "D", "E", "F" практично буде відсутній. В результаті рухомі поршні 9, 10, 14, 17, 18, 6 і вихідний шток 7 будуть переміщатися з однаковою швидкістю і передавати вихідний сигнал на виконавчий орган CAP або САК, викликаний тільки змінюванням вхідного сигналу. В цьому випадку запропонований двоступінчастий поршневий пневмопривод буде працювати як підсилювальна (П) динамічна ланка. 2 UA 122775 U 5 10 15 Таким чином, запропонований пневмопривод, на відміну від відомого приводу, має розширені функціональні можливості, оскільки в перехідних процесах являє собою ПДД динамічну ланку. Застосування двоступінчастого поршневого привода одинарної дії, у порівнянні з уже відомим, дасть можливість: розширити функціональні можливості пневмопривода шляхом установки в циліндр пневматичного двоступінчастого перетворювача вхідних сигналів із незначним ускладненням його конструкції; підвищити точність функціонування CAP і САК за рахунок покращення динамічних показників приводу можливим гнучким формуванням додаткових, однакових за фізичною природою, складових вихідних сигналів, пропорційних швидкості і прискоренню змінювання вхідних сигналів з одночасним пневматичним підсумовуванням їх із пропорційними вхідними сигналами; розширити область застосування CAP і САК, обладнаних запропонованим пневмоприводом з підпружиненим виконавчим органом, в різних галузях пневмоавтоматики, працюючих переважно в умовах різкоперемінних вхідних сигналів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 Двоступінчастий поршневий привод, що містить циліндр з торцевими кришкою і фланцем, з розміщеним усередині виконавчим поршнем з вихідним штоком, і зрівноважуючу пружину, а також пневмолінію вихідного тиску, приєднану до кришки, який відрізняється тим, що в циліндрі додатково між виконавчим поршнем і кришкою установлений двоступінчастий, з першим і другим підсумовуючими механізмами, перетворювач вхідних сигналів, перший ступінь якого включає перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням ніж кришкою і першим поршнем першої камери сполученої з пневмолінією вхідного тиску через додатково установлений перший регулювальний дросель, між першим, другим, третім рухомими поршнями і зв'язаною з останнім втулкою, камери сполучені безпосередньо, а третя камера між другим, третім рухомими поршнями з втулкою через отвори в циліндри сполучена з атмосферою, при цьому другий ступінь включає нерухомий поршень, зв'язаний з циліндром, четвертий і п'ятий, з'єднані між собою жорсткими тягами, рухомі поршні, з утворенням між нерухомим і четвертим рухомим поршнями четвертої камери, сполученої через пневмолінію і додатково установлений другий регулювальний дросель з перепускною, між третім рухомим і нерухомим поршнями, камерою, між четвертим, п'ятим і виконавчим поршнями, сполученою з проміжною камерою безпосередньо, а шоста камера між п'ятим і виконавчим рухомими поршнями, а також напрямною виконавчого поршня і фланцем циліндра через отвори у напрямній і фланці сполучена з атмосферою, причому підсумовуючий механізм першого ступеня перетворювача виконаний у вигляді третього рухомого поршня, а другого ступеня - у вигляді виконавчого поршня, розміщеного усередині напрямної, з'єднаної з торцевим фланцем циліндра. 3 UA 122775 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
МПК: F15B 15/08
Мітки: поршневий, пневмопривод, двоступінчастий
Код посилання
<a href="https://ua.patents.su/6-122775-dvostupinchastijj-porshnevijj-pnevmoprivod.html" target="_blank" rel="follow" title="База патентів України">Двоступінчастий поршневий пневмопривод</a>
Пневматичний поршневий привод

Номер патенту: 119633
Опубліковано: 25.09.2017
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: F15B 15/00
Мітки: привод, пневматичний, поршневий
Формула / Реферат:
Пневматичний поршневий привод, що містить циліндр з торцевими кришкою і фланцем з розміщеним усередині виконавчим поршнем з вихідним штоком, зрівноважуючий протидіючий вантаж через тягу і двоплечий важіль, з'єднаний зі штоком, а також пневмолінію вихідного тиску, приєднану до кришки, який відрізняється тим, що в циліндрі додатково між виконавчим поршнем і кришкою установлені перший і другий, зв'язані між собою жорсткими тягами, рухомі...
Поршневий слідкуючий пневмопривод
Номер патенту: 121565
Опубліковано: 11.12.2017
Автори: Божок Аркадій Михайлович, Гарасимчук Ігор Дмитрович
МПК: G05B 11/44, F15B 9/00
Мітки: пневмопривод, слідкуючий, поршневий
Формула / Реферат:
Поршневий слідкуючий пневмопривод, що містить циліндр з торцевою кришкою і внутрішньою порожниною, розділеною ущільненням на дві камери, в першій з яких розміщений поршень з порожнистим штоком, в якому установлена зв'язана з ним одним кінцем пружина, а в другій камері - підпружинена виконавча мембрана, жорсткий центр якої з'єднаний з другим кінцем пружини штока і золотником розподілу робочого повітря, сполученого пневмолініями з камерами...
Двоступінчастий диференціюючий гідроциліндр

Номер патенту: 108073
Опубліковано: 24.06.2016
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: F15B 7/00, F15B 15/00, G06G 5/00, G05D 16/00
Мітки: двоступінчастий, диференціюючий, гідроциліндр
Формула / Реферат:
Двоступінчастий диференціюючий гідроциліндр, що містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим...
Поршневий двоступінчастий компресор
Номер патенту: 69796
Опубліковано: 10.05.2012
Автори: Шуваєв Леонід Володимирович, Король Олексій Олександрович, Жарков Павло Євгенович, Кирик Григорій Васильович, Дашутін Григорій Петрович
МПК: F04B 9/02
Мітки: двоступінчастий, поршневий, компресор
Формула / Реферат:
1. Поршневий двоступінчастий компресор що містить корпус з W-подібним розміщенням циліндрів, колінчастий вал з балансирами, розміщений в корпусі з можливістю обертання з системою каналів для змащування шатунних шийок, шатунів і приєднаний до корпусу мастильний насос, який відрізняється тим, що поршні, безпосередньо з'єднані за допомогою кривошипних головок шатунів з колінчастим валом, співвідношення радіуса кривошипа і міжцентрової відстані...
Поршневий гідропневмомеханічний диференціатор
Номер патенту: 86870
Опубліковано: 10.01.2014
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
Мітки: поршневий, диференціатор, гідропневмомеханічний
Формула / Реферат:
Поршневий гідропневмомеханічний диференціатор, що містить підсумовуючий механізм, вузол приймання вхідних сигналів з сильфоном, перетворювач сигналів з першим і другим сильфонами, з'єднаними одними торцями з першим рухомим фланцем і установленими в напрямній, перший сильфон з сильфоном вузла сполучений через регульований дросель, а другий сильфон - через рухомий фланець і гнучкий трубопровід, причому другий торець другого сильфона з'єднаний...
Попередній патент: Двигун на фазових переходах
Наступний патент: Поліетергуанідингідрохлорид як фунгіцидна речовина
Випадковий патент: Пристрій для контролю параметрів шліцьових валів