Система дистанційного керування стрілецькою та артилерійською зброєю
Номер патенту: 123037
Опубліковано: 12.02.2018
Автори: Грєховодов Олександр Миколайович, Присяжний Анатолій Євгенович, Більченко Сергій Георгійович, Кривоконь Олександр Григорович, Присяжний Валерій Анатолійович, Цомартов Юрій Муратович, Ломінадзе Віктор Ілліч

Формула / Реферат
1. Система дистанційного керування стрілецькою та артилерійською зброєю, що включає пульт дистанційного керування, мікроконтролер, драйвери, які з′єднані з виконуючим механізмом, відеокамеру, монітор та блок живлення, яка відрізняється тим, що як виконуючий механізм використано два крокових двигуни, а пульт дистанційного керування виконаний на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї.
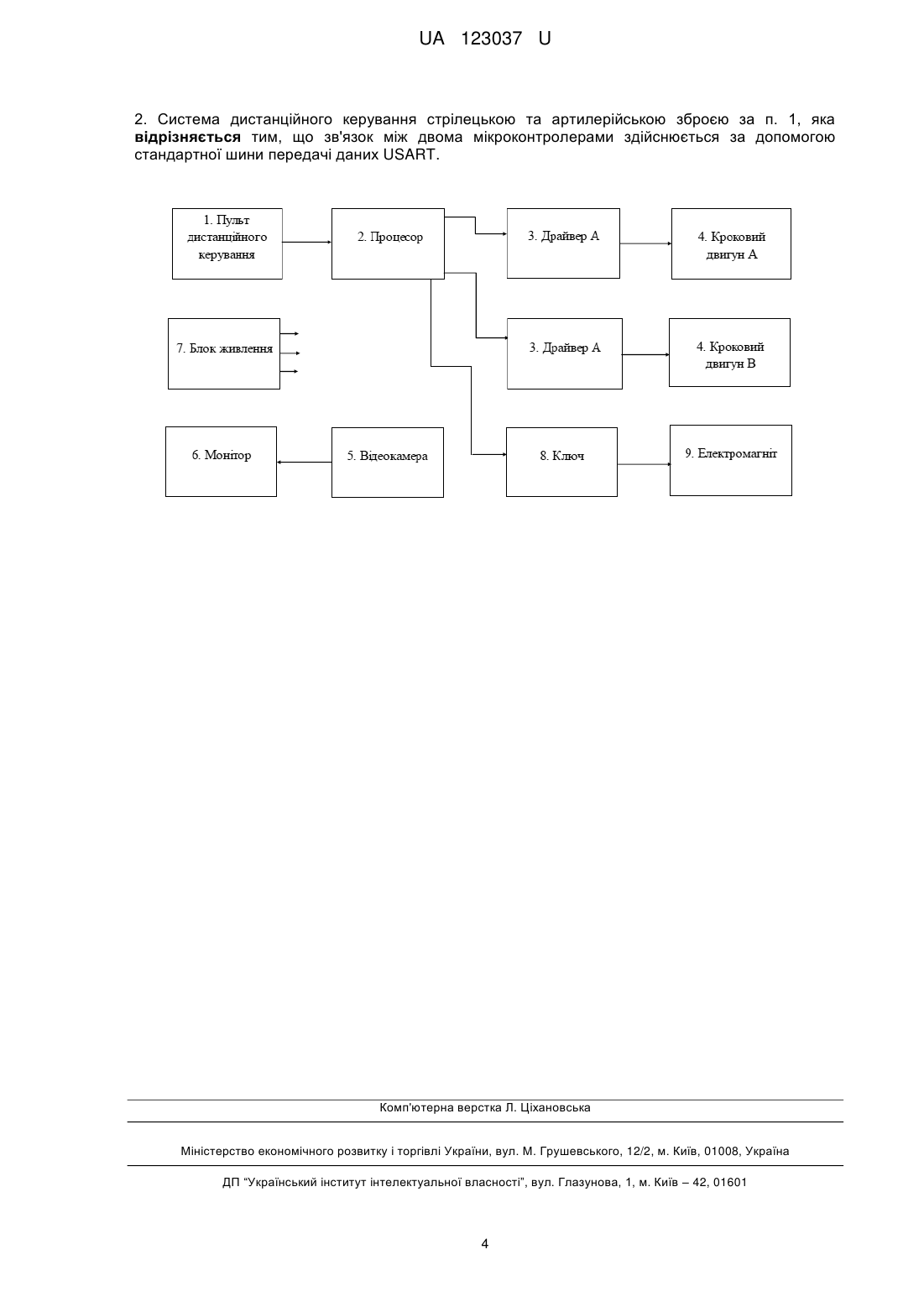
2. Система дистанційного керування стрілецькою та артилерійською зброєю за п. 1, яка відрізняється тим, що зв'язок між двома мікроконтролерами здійснюється за допомогою стандартної шини передачі даних USART.
Текст
Реферат: Система дистанційного керування стрілецькою та артилерійською зброєю, що включає пульт дистанційного керування, мікроконтролер, драйвери, які з′єднані з виконуючим механізмом, відеокамеру, монітор та блок живлення, причому як виконуючий механізм використано два крокових двигуни, а пульт дистанційного керування виконаний на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї. UA 123037 U (12) UA 123037 U UA 123037 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем дистанційного керування стрілецькою та артилерійською зброєю, наприклад 7,62-мм кулеметів, 12,7-мм кулеметів та ін., а також 57-мм автоматичної зенітної гармати С-60, і може бути використана для керування стрільбою стрілецькою зброєю артилерійською та наведенням по азимуту та куту місця. На сьогодні застосування стрілецької та артилерійської зброї характеризується рядом недоліків. Для стрілецької зброї це зокрема нерегульована витрата боєприпасів, відсутність контролю за точністю стрільби, а для артилерійської зброї, наприклад для 57-мм автоматичної зенітної гармати С-60, це спосіб стрільби, що полягає в стрільбі батареєю із 6-8 гармат, тобто відбувається скупчення 6-8 гармат та обслуговуючого бойового персоналу 8 чоловіка на одну гармату на супротивника, особливо при стрільбі по наземних та надводних цілях на лінії фронту, а також обмежена точність стрільби і велика витрата снарядів, що призводить до нагрівання дульної частини ствола (до 400 °С), яку потрібно охолоджувати за допомогою охолоджувальної установки. Крім того, ще один недоліком є відсутність "памяті" азимутів та кутів місця пристріляних цілей при веденні стрільби по цілях на лінії фронту. Нарешті найголовнішим недоліком стрілецької та артилерійської зброї є великі втрати особового складу при їх застосуванні по наземних та надводних цілям на лінії фронту. Враховуючи вищевказане існує необхідність в модернізації стрілецької та артилерійської зброї при її застосуванні по наземних та надводних цілях, зокрема в створенні відповідної системи дистанційного керування стрілецькою та артилерійською зброєю. Винахідникам відомо багато аналогічних рішень систем дистанційного керування, серед яких за сукупністю суттєвих ознак найближчими є наступні. Відома система дистанційного керування стрілецькою зброєю за заявкою RU2005127400, опублікованою 10.03.2007р., що містить щонайменше одну одиницю стрілецької зброї, встановлену стаціонарно. При цьому кожна одиниця стрілецької зброї містить відеокамеру, привід вертикального і горизонтального переміщення, привід спускового механізму і приймально-передаючий пристрій, з'єднані каналом зв'язку через керуюче приймальнопередавальний пристрій з комп'ютером, що має монітор і пристрій управління, наприклад "джойстик". Недоліками даного аналога є те, що не здійснюється забезпечення точності по азимуту та куту місця, а також не забезпечується стрільба в режимах одиничного пострілу та короткими чергами. Відома система керування зброєю за заявкою RU2007117066, опублікованою 20.11.2008р., що містить апаратну частину, яка виконана у вигляді контролера енергетичного каналу авіаційних засобів ураження (АСП), контролера інформаційного каналу АСП і блоків управління АСП, підключених до міжсистемних каналу інформаційного обміну, контролер енергетичного каналу АСП і блоки управління АСП, з'єднані між собою каналом локальної інформації, блоки управління АСП і контролер інформаційного каналу АСП з'єднані відповідно з енергетичним і інформаційним каналами АСП точок підвіски. Недоліками прототипу є те, що не здійснюється забезпечення точності по азимуту та куту місця, а також не забезпечується стрільба в режимах одиничного пострілу та короткими чергами. Відомий малокаліберний зенітний артилерійський комплекс за патентом RU118735, опублікованим 27.07.2012р., що містить розміщений на носії стрільбовий модуль з з'єднаними інтерфейсними лініями зв'язку оптико-електронною системою вимірювання координат цілі, автоматом супроводу цілі по азимуту і куту місця, пультом дистанційного керування, відеокамерою, системою управління наведенням стрільбового модуля і центральною обчислювальною машиною, забезпеченою програмами обчислення координат прицілювання, наведенням стрільбового модуля з можливістю компенсації динамічних помилок і розрахунку параметрів і траєкторії руху цілі. При цьому комплекс містить блок зовнішніх інтерфейсів, що забезпечує обмін інформацією автомата супроводу цілі і центральної обчислювальної машини з зовнішніми пристроями, і розміщений на стрільбовому модулі юстирувальний пристрій, на якому встановлена оптико-електронна система вимірювання координат цілі. Недоліками аналогу є те, що не здійснюється забезпечення точності по азимуту та куту місця, а також не забезпечується стрільба в режимах одиничного пострілу та короткими чергами. За прототип прийнято систему дистанційного керування засобами малокаліберної зенітної артилерії за патентом UA114613, опублікованим 10.03.2017р., що містить пульт дистанційного керування, блок драйверів, виконуючий механізм, відеокамеру, монітор та блок живлення, при цьому як виконуючий механізм використано щонайменше один кроковий двигун, з′єднаний з 1 UA 123037 U 5 10 15 20 25 30 35 40 45 50 55 блоком драйверів, а пульт дистанційного керування виконаний на основі щонайменше одного мікроконтролера. Система дистанційного керування засобами малокаліберної зенітної артилерії характеризується підвищеною точністю наведення по азимуту та куту місця, зменшенням витрат снарядів при стрільбі по одиничних цілях та цілях в межах населених пунктів та промислових об’єктів, проте не дозволяє забезпечити даний ефект при використанні її для стрілецької зброї. В основу корисної моделі поставлено задачу вдосконалення системи дистанційного керування стрілецькою та артилерійською зброєю шляхом виконання в системі виконуючого механізму у вигляді двох крокових двигунів та пульту дистанційного керування на основі двох мікроконтролерів, що забезпечує підвищення точності наведення по азимуту та куту місця з плавним збільшенням швидкості наведення, зменшення витрат патронів/снарядів при стрільбі по одиничних цілях та цілях в межах населених пунктів та промислових об’єктів, підвищення точності стрільби системи в режимах одиничного пострілу та короткими чергами. Поставлена задача вирішується таким чином, що в системі дистанційного керування стрілецькою та артилерійською зброєю, що включає пульт дистанційного керування, мікроконтролер, драйвери, які з’єднані з виконуючим механізмом, відеокамеру, монітор та блок живлення, відповідно до корисної моделі, як виконуючий механізм використано два крокових двигуни, а пульт дистанційного керування виконаний на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї. При цьому зв'язок між двома мікроконтролерами може здійснюватися за допомогою стандартної шини передачі даних USART. Між сукупністю суттєвих ознак корисної моделі та технічним результатом, який досягається при її використанні, існує наступний причинно-наслідковий зв'язок. В системі дистанційного керування стрілецькою та артилерійською зброєю, відповідно до однієї з ознак корисної моделі, як виконуючий механізм використано два крокових двигуни. З рівня техніки відомо, що крокові двигуни з магнітним ротором дозволяють отримати більш крутячий момент та забезпечити фіксацію ротора при знеструмлених обмотках статора, а послідовна активація цих обмоток визиває дискретне кутове переміщення (кроки) ротора. В мікрокроковому режимі обмотки крокового двигуна керуються незалежно. Це дозволяє при зміні співвідношення струмів обмоток фіксувати ротор в проміжному стані між кроками, тобто підвищувати плавність обертання ротора. Таким чином, два крокових двигуни в мікрокроковому режимі будуть мати більш високу точність позиціювання, що в свою чергу дозволяє підвищити точність стрільби в режимах одиничного пострілу та короткими чергами, а також зменшити витрати снарядів при стрільбі по одиничних цілях або цілях в межах населених пунктів та промислових об’єктів. Відповідно до ще однієї з ознак корисної моделі, що заявляється, пульт дистанційного керування виконаний на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї. В результаті експериментальних досліджень встановлено, що при мінімальному кутовому переміщені ротора КДвΔφ=1,8 та коефіцієнті зменшення Кφ = 32 драйвера в мікрокроковому режимі дистанційного наведення можна отримати точність наведення на рівні одиниць кутових хвилин. Мікроконтролер (аналогічно режиму стрільби) працює як програмно керований генератор відеоімпульсів зі змінною частотою повторення, що дозволяє досить просто реалізувати функцію точного та грубого наведення на ціль. Наприклад, при короткочасному натисненні на кнопку наведення по азимуту або куту місця швидкість наведення буде мінімальна, а при утриманні кнопки управлінняв затисненому положенні – швидкість наведення буде плавно збільшуватись з мінімальної до максимальної. Максимальна швидкість наведення буде визначатись потужністю крокового двигуна. Таким чином, виконання пульта дистанційного керування на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї, дозволяє забезпечити передачу сигналів за допомогою двопровідної лінії передачі даних, радіоканалу, Wi-Fi та ін., а отже, забезпечити цілісність особового складу. При цьому зв'язок між двома мікроконтролерами здійснюється за допомогою стандартної шини передачі даних USART, що забезпечує передачу даних з одного місця в інше. Крім того, мікроконтролери в каналах наведення по азимуту та куту місця дозволяють запам’ятовувати кутові координати пристріляних цілей з метою швидкого наведення на них. Також керування кількістю пострілів виконується шляхом зміни частоти повторення відеоімпульсів, що надходять із мікроконтролера на ключ для вмикання електромагніту, що натискає на курок стрілецької/артилерійської зброї. 2 UA 123037 U 5 10 15 20 25 30 35 40 45 50 Таким чином, використання мікроконтролера та однотипних крокових двигунів в каналах стрільби, наведення та гальмування забезпечує необхідну уніфікацію дистанційно керованої стрілецької та артилерійської зброї, що значно спрощує її обслуговування та ремонт. Запропонована корисна модель ілюструється наступним прикладом її виконання, а також відповідними ілюстрованими матеріалами, на яких зображено наступне: На кресленні наведено загальну структурну схему системи дистанційного керування стрілецькою та артилерійською зброєю. Наведені нижче зображення та приклад конкретного виконання системи дистанційного керування стрілецької та артилерійської зброї ніяким чином не обмежують обсяг домагань, викладений у формулі, а тільки пояснюють суть корисної моделі. Система дистанційного керування стрілецької та артилерійської зброї включає пульт дистанційного керування 1, який може бути виконаний на базі двох мікроконтролерів, один з яких встановлений на самій стрілецькій зброї, наприклад кулеметі або артилерійській зброї, наприклад, автоматичній зенітній гарматі С-60. Як такі мікроконтролери може бути використаний мікроконтролер ATmega16. Сигнали з пульта дистанційного керування 1 за допомогою кабелю або лінії зв’язку подаються на процесор 2 блока керування, що встановлюється на стрілецькій або артилерійській зброї, зокрема на кулеметі або на зенітній гарматі. Цей процесор 2 виробляє сингали управління для роботи драйверів 3. До кожного драйвера 3 підключений кроковий двигун 4. На місці прицілу кулемету або зенітної гармати розміщена відеокамера 5, сигнали з якої передаються на монітор 6. Блок живлення 7 виконаний у вигляді двох послідовно з’єднаних акумуляторних батарей, напругою по 12 В кожна. Керування кількістю пострілів виконується шляхом зміни частоти повторення відеоімпульсів, що надходять із мікроконтролера на ключ 8 для вмикання електромагніту 9, що натискає на курок стрілецької/артилерійської зброї. Система дистанційного керування стрілецькою та артилерійською зброєю працює наступним чином. В результаті багаторазового тактичного застосування системи пульт дистанційного керування 1 розміщений на відстані кількох десятків метрів від кулемета або зенітної гармати. Сигнали з пульта дистанційного керування 1 за допомогою кабелю, який може бути довжиною 30 м і більше, подаються на блок керування. Також в іншому варіанті виконання системи передача цих сигналів можлива за допомогою двопровідної лінії передачі даних, радіоканалу, Wi-Fi та ін. Драйвери 3 виробляють у відповідності до цих сигналів керування необхідні напруги для забезпечення роботи крокових двигунів 5. Крокові двигуни 5 через редуктори або важелі приводять у рух виконуючі механізми. Наведення на ціль здійснюється за допомогою шкали, що нанесена на екрані монітора 6. На монітор 6 подається сигнал з відеокамери 5, яка закріплена на місці прицілу кулемета або зенітної гармати. Живлення системи дистанційного керування здійснюється за допомогою блока живлення 7, виконаного у вигляді двох послідовно з’єднаних акумуляторних батарей. Таким чином, натискання кнопки чи перемикання тумблера на пульті дистанційного керування 1 призводить до дистанційних відповідних механічних переміщень на стрілецькій/артилерійській зброї. Таким чином, застосування заявленої корисної моделі дозволяє вдосконалити систему дистанційного керування стрілецькою та артилерійською зброєю шляхом виконання в системі виконуючого механізму у вигляді двох крокових двигунів та пульту дистанційного керування на основі двох мікроконтролерів, що забезпечить підвищення точності наведення по азимуту та куту місця з плавним збільшенням швидкості наведення, зменшення витрат патронів/снарядів при стрільбі по одиничних цілях та цілях в межах населених пунктів та промислових об’єктів, підвищення точності стрільби системи в режимах одиничного пострілу та короткими чергами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 1. Система дистанційного керування стрілецькою та артилерійською зброєю, що включає пульт дистанційного керування, мікроконтролер, драйвери, які з′єднані з виконуючим механізмом, відеокамеру, монітор та блок живлення, яка відрізняється тим, що як виконуючий механізм використано два крокових двигуни, а пульт дистанційного керування виконаний на основі двох мікроконтролерів, один з яких встановлений на самій стрілецькій або артилерійській зброї. 3 UA 123037 U 2. Система дистанційного керування стрілецькою та артилерійською зброєю за п. 1, яка відрізняється тим, що зв'язок між двома мікроконтролерами здійснюється за допомогою стандартної шини передачі даних USART. Комп'ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F41G 3/00, G06F 19/00, F41G 5/00, F41C 27/00
Мітки: зброєю, стрілецькою, система, артилерійською, керування, дистанційного
Код посилання
<a href="https://ua.patents.su/6-123037-sistema-distancijjnogo-keruvannya-strileckoyu-ta-artilerijjskoyu-zbroehyu.html" target="_blank" rel="follow" title="База патентів України">Система дистанційного керування стрілецькою та артилерійською зброєю</a>
Система прицілювання та керування зброєю
Номер патенту: 53460
Опубліковано: 15.03.2005
Автори: Кравченко Микола Іванович, Захарчук Василь Дмитрович, Лисиця Леонід Іванович, Глущенко Євген Миколайович, Фабро Галина Іванівна, Марцинюк Віктор Іванович, Баранчук Олександр Іванович, Стефанович Віктор Тарасович, Демченко Леонтій Іванович
МПК: F41G 1/00, F41G 3/06, F41G 9/00
Мітки: прицілювання, керування, зброєю, система
Формула / Реферат:
1. Система прицілювання та керування зброєю, що містить безпосередньо комплекс зброї, розміщений на бойовій машині, і систему прицілювання та керування зазначеною зброєю, при цьому до складу комплексу зброї входять автоматична гармата, спарений з гарматою кулемет та пускова установка протитанкового ракетного комплексу з протитанковими керованими реактивними снарядами, оснащеними інфрачервоною фарою, до складу системи прицілювання та керування...
Система дистанційного керування охороною й обороною об`єктів
Номер патенту: 30641
Опубліковано: 11.03.2008
Автори: Сендецький Микола Миколайович, Лапицький Сергій Володимирович, Мельник Олександр Дмитрович, Андрійченко Олег Станіславович, Лотоха Людмила Михайлівна, Жованик Борис Євгенійович, Комаров Володимир Олександрович, Кручінін Сергій Володимирович, Машталір Вадим Віталійович, Наумов Олександр Миколайович, Василенко Олександр Васильович, Іванов Борис Павлович, Турчин Валентин Миколайович
МПК: F41H 11/00
Мітки: об'єктів, керування, система, дистанційного, обороною, охороною
Формула / Реферат:
1. Система дистанційного керування охороною й обороною об'єктів, що містить одну, дві або більше одиниць стрілецької зброї з дистанційним керуванням і боєкомплектом, аналогічну за кількістю одиниць зброї кількість відеокамер, установлених співвісно зі зброєю, приводів вертикального та горизонтального переміщення зброї, приводів спускових механізмів зброї, керуючих приймально-передавальних пристроїв і блоків розподілу команд, а також пристрій...
Система дистанційного керування засобами малокаліберної зенітної артилерії
Номер патенту: 114613
Опубліковано: 10.03.2017
Автори: Грєховодов Олександр Миколайович, Ломінадзе Віктор Ілліч, Кривоконь Олександр Григорович, Цомартов Юрій Муратович, Присяжний Анатолій Євгенович, Більченко Сергій Георгійович
Мітки: зенітної, система, артилерії, малокаліберної, засобами, дистанційного, керування
Формула / Реферат:
1. Система дистанційного керування засобами МЗА (малокаліберної зенітної...
Пристрій дистанційного керування
Номер патенту: 1811
Опубліковано: 15.05.2003
Автори: Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: G08C 19/16
Мітки: керування, дистанційного, пристрій
Формула / Реферат:
Пристрій дистанційного керування, що містить блок дистанційного керування, переносний пульт керування і джерела живлення, який відрізняється тим, що він оснащений другим переносним пультом керування, з'єднаним однією кабельною перемичкою з блоком дистанційного керування.
Трос дистанційного керування
Номер патенту: 2263
Опубліковано: 15.01.2004
Автори: Макутонін Юрій Михайлович, Голенко Едуард Євгенович, Кузнецов Олександр Федорович
МПК: F16G 9/00
Мітки: дистанційного, трос, керування
Формула / Реферат:
Трос дистанційного керування, що містить коаксіально розташовані сердечник та зовнішній кожух, який відрізняється тим, що зовнішній кожух містить металеву стрічкову навивку з зовнішнім полімерним покриттям.
Попередній патент: Захисний матеріал
Наступний патент: Виделка столова
Випадковий патент: Безпідкладкове пружне скріплення рейки до шпали