Підводний буксирований апаратурний носій
Номер патенту: 14168
Опубліковано: 25.04.1997
Автори: Ком'ягін Юрій Васильович, Старков Костянтин Олександрович, Блінков Віктор Олександрович, Гайскій Віталій Олександрович, Сафонов Георгій Олександрович, Іваненко Михайло Іванович

Формула / Реферат
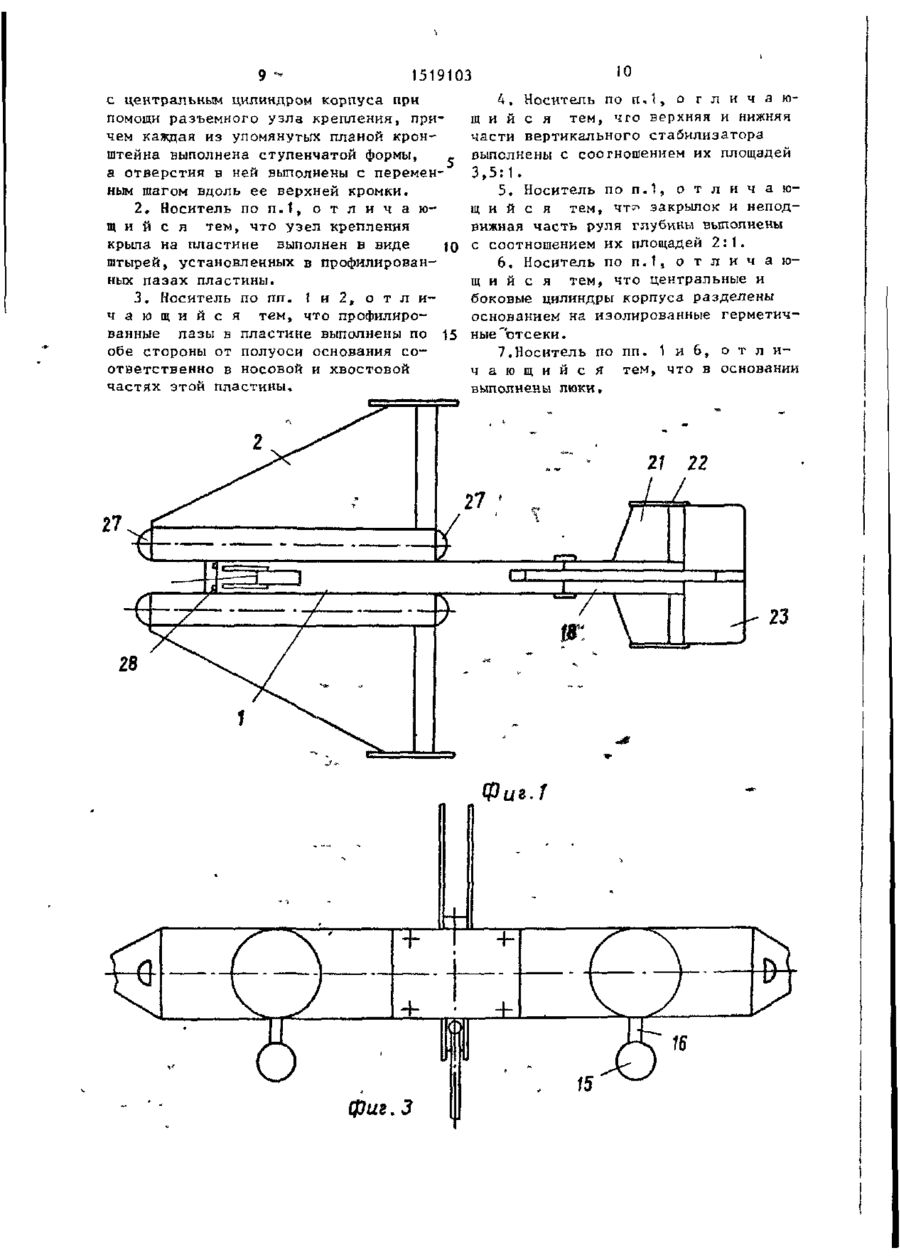
1. Подводный буксируемый аппаратурный носитель, содержащий корпус с хвостовым оперением, выполненный в виде центрального и боковых цилиндров, жестко соединенных между собой при помощи основания обтекаемого профиля, на котором установлен кронштейн для крепления грузонесущего кабеля; выполненный в виде двух параллельных планок с отверстиями, при этом на внешней боковой поверхности каждого бокового цилиндра установлена пластина, на которой закреплено крыло стреловидной формы с закрылком, а на нижней поверхности установлен вертикальный киль, причем хвостовое оперение корпуса включает в себя вертикальный несимметричный относительно корпуса стабилизатор и приводной руль глубины, отличающийся тем, что, с целью повышения эффективности работы носителя путем улучшения его управляемости, основание корпуса выполнено в виде герметичного цилиндра, торцы которого выполнены в виде полуосей, на которых установлены упомянутые крылья с возможностью их поворота и фиксации в требуемом положении при помощи узла крепления, а каждый вертикальный киль снабжен герметичным контейнером, установленным с возможностью его перемещения в продольном направлении, при этом хвостовое оперение снабжено трубчатым элементом, на котором установлены упомянутые вертикальный стабилизатор и руль глубины, который выполнен с закрылком, кинематически связанным с приводом, установленным в полости упомянутого трубчатого элемента, который соединен с центральным цилиндром корпуса при помощи разъемного узла крепления, причем каждая из упомянутых планок кронштейна выполнена ступенчатой формы, а отверстия в ней выполнены с переменным шагом вдоль ее верхней кромки.
2. Носитель по п. 1, отличающийся тем, что узел крепления крыла на пластине выполнен в виде штырей, установленных в профилированных пазах пластины.
3. Носитель по пп. 1 и 2, отличающийся тем, что профилированные пазы в пластине выполнены по обе стороны от полуоси основания соответственно в носовой и хвостовой частях этой пластины.
4. Носитель по п. 1, отличающийся тем, что верхняя и нижняя части вертикального стабилизатора выполнены с соотношением их площадей 3,5 : 1.
5. Носитель по п. 1, отличающийся тем, что закрылок и неподвижная часть руля глубины выполнены с соотношением их площадей 2:1.
6. Носитель по п. 1, отличающийся тем, что центральные и боковые цилиндры корпуса разделены основанием на изолированные герметичные отсеки.
7. Носитель по пп. 1 и 6, отличающийся тем, что в основании выполнены люки.
Текст
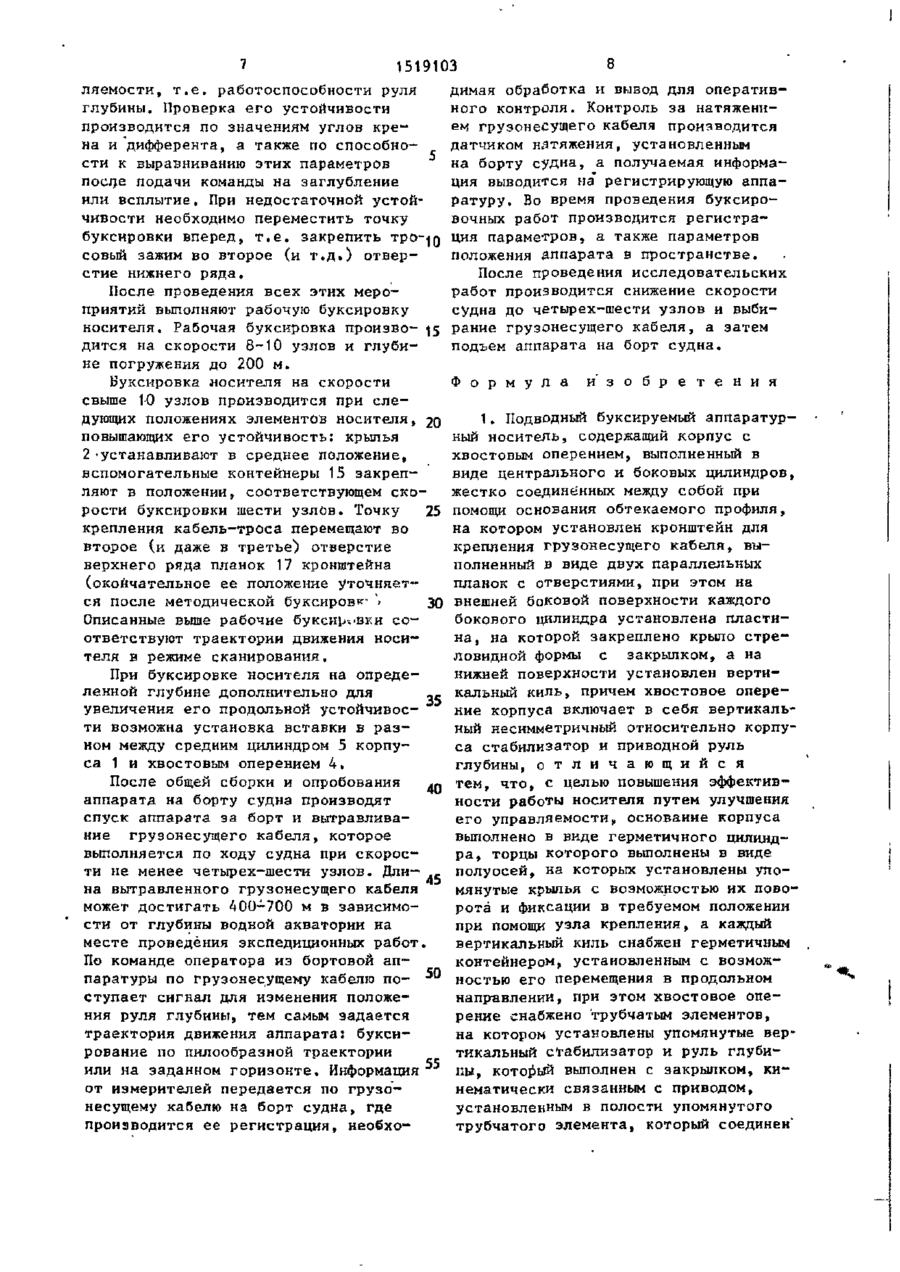
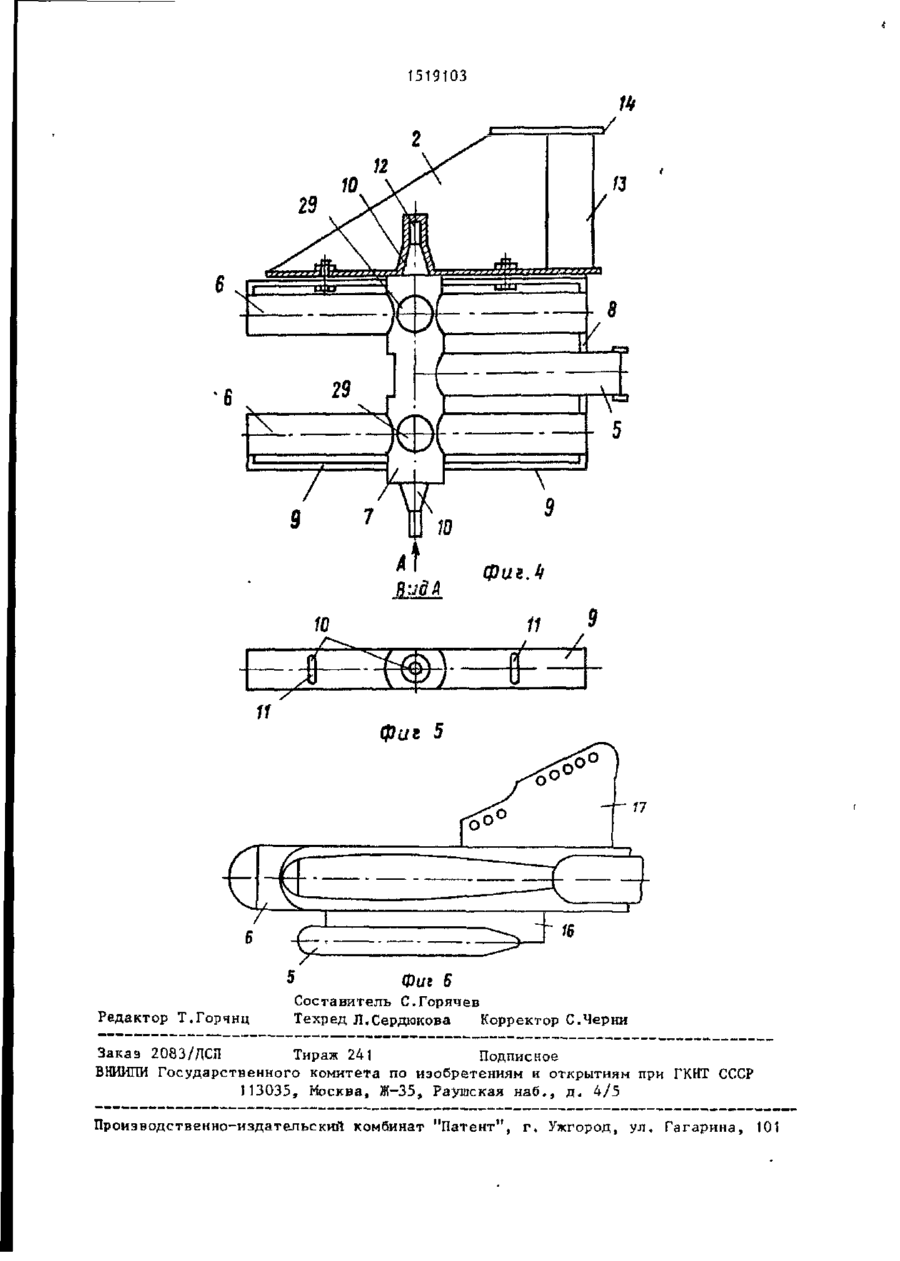
Изобретение относится к буксируемым подводным аппаратам, способным изменять траекторию своего движения по глубине. Цель изобретения - повышение эффективности работы носителя путем улучшения его управляемости. Носитель содержит корпус, имеющий основание, перпендикулярно продольной оси которого приварены центральный и боковые цилиндры, снабженные боковыми пластинами. Торцы основания выполнены s виде полуосей, на которые 15 3 установлены крылья, имеющие стреловидную форму и образующие с корпусом единую несущую поверхность. Крылья прикреплены к боковым пластинам корпуса с возможностью изменения угла атаки. Каждый вертикапьный киль выполнен в виде герметичного обтекаемого контейнера, закрепленного на боковом цилиндре корпуса с возможностью продольного перемещения при помощи планки с пазом. На основании установлен кронштейн для крепления грузонесущего кабеля, выполненный s виде двух параллельных планок 17 с дискретными отверстиями. Хвостовое оперение состоит из несушей трубы, являющейся продолжением центрального цилиндра корпуса, на которой закреплены вертикальный стабилизатор и руль глубины. Вертикальный стабилизатор выполнен в виде пластин 19 и 20, несимметричных относительно несущей плоскости. Руль глубины состоит из неподвижной симметричной пластины 21 ,на конце которой шарнирно установлен закрылок 23, кинематически связанный с рулевым приводом 26, размещенным в несущей трубе хвостового оперения. 6 з.п.ф-лы, 6 ил. 16 фиг 2 40-89 20 2S со 1519103 Изобретение относится к буксируемым подводным аппаратам, способным изменять траекторию своего движения по глубине. Цель изобретения - повышение эффективности работы носителя путем улучшения его управляемости. На фиг. 1 изображен предлагаемый носитель, вид сверху; на фиг. 2 10 то же, вид сбоку; на фиг. 3 - то же, вид спереди; на фиг, 4 - узел крепления крыла к корпусу носителя; на фиг. 5 - вид по стрелке А на фиг.4; на фиг. 6 - узел крепления грузонесущего кабеля. Носитель океанографического комплекса содержит корпус 1, крылья 2, два вертикальных киля 3, кронштейн для крепления грузонесущего кабеля 20 и хвостовое оперение 4. Корпус 1 выполнен из центрального 5 и четырех боковых 6 герметичных цилиндров, которые размещены в одной плоскости и вварены одним концом в 25 основание 7, расположенное перпендикулярно продольным осям цилиндров и выполненное в виде полого герметичного продолговатого тела обтекаемой формы, например в виде цилиндра. Пары боковых цилиндров 6 вварены в осно 30 вание 7 соосно и симметрично в носовой и хвостовой частях, а центральный цилиндр 5 вварен в основание со стороны хвостовой части, параллельно 35 боковым цилиндрам 6, на равном расстоянии между ними. Для усиления механической жесткости корпуса 1 цилиндры 5 и 6 дополнительно скреплены сваркой с поперечными планками 8 и 40 продольными боковыми пластинами 9. Для повышения эксплуатационной надежности цилиндры 5 и 6 при помощи основания 7 разделены на отсеки, которые герметизируются при установке измерительной аппаратуры в цилиндры. 45 К торцам основания 7 приварены полуоси 10. Боковые пластины 9 имеют профилированные пазы 11, расположенные по обе стороны от полуоси 10 и выполненные по дуге симметрично отно- 50 сительно полуоси с центральным углом ±5°. На каждую полуось 10 надето крыло 2 с возможностью поворота, для чего оно имеет трубу 12, повторяющую фор- 55 му полуоси 10. Крыло 2 при помощи болтов и гаек, пропущенных через пазы 1\, прикреплено к боковым пластинам 9. Установка крыльев 2 на полуосях 10 и фиксация их в пазах 11 пластин 9 по обе стороны от полуоси 10 обеспечивает жесткое крепление крыльев с корпусом носителя, а наличие профилированных пазов 11 в пластинах 9 позволяет изменять угол атаки крыла в пределах +5°. Крылья 2 имеют стреловидную форму в плане и авиационный симметричный профиль. Стреловидность крыла составляет 60 . Крыло 2 снабжено закрылком 13, являющимся его продолжением и соединенным с ним шарнирно. Это позволяет изменять форму крыла, а значит и его гидродинамические качества, и компенсировать неточности изготовления и установки крыльев. По концам крыльев 2 установлены шайбы 14, препятствующие перетеканию потока вдоль крыла 2. Крылья конструктивно выполнены в виде жесткой фермы, обтянутой тонким листовым металлом. Вода может свободно проникать через отверстия внутрь обшивки и этим снижаются требования к ее прочности. Пространство между цилиндрами 5 и 6, основанием 7, планками 8 и 9 закрыто сверху и снизу пластинами, прикрепленными к основанию 7 и планкам 8 и пластинам 9 так, что создается единая несущая поверхность с крыльями 2, обеспечивающая необходимое заглубляющее усилие. Каждый вертикальный киль 3 выполнен в виде герметичного продолговатого контейнера 15 обтекаемой формы, закрепленного на планке 16, например, гайками и болтами. Планка 16 имеет паз, что обеспечивает возможность продольного перемещения контейнера 15. Планки 16 прикреплены к боковым цилиндрам 6 корпуса параллельно одна другой. На центральном цилиндре 5 корпуса 1 приварен кронштейн для крепления грузонесущего кабеля. Кронштейн выполнен в виде двух параллельных планок 17 с дискретно расположенными отверстиями, причем отверстия выполнены с переменным шагом по длине и высоте, например, так, что центры отверстий лежат на двух наклонных параллельных прямых. Это позволяет регулировать в широких пределах положение точки буксировки относительно ' центра тяжести аппарата. 1519103 с штоком. Электрический сигнал потен-* Хвостовое оперение 4 служит для циометра пропорционален углу поворообеспечения требуемой поперечной та закрылка 23. устойчивости и состоит из несущей трубы 18, вертикального стабилизатоЦилиндры 5 и 6 корпуса и контейра и руля глубины. Несущая труба 18 неры 15 вертикального киля 3 служат соединена болтами с центральным цидля размещения измерительной аппаралиндром 5 корпуса 1 так, что являеттуры. Датчики измеряемых параметров ся ее продолжением. Для изменения размещают на передних и задних гердлины хвостового оперения 4 и устаметизирующих крышках 2 7, установленновки дополнительной исследовательсных на торцах цилиндров 5 и 6 корпукой аппаратуры между цилиндром 5 и са 1 . Грузоне.сущий кабель при помощи несущей трубой 18 можно вставить цизажима крепится к планкам 17 и через линдр переменной длины - переменную сальниковый ввод, установленный в вставку. Соединение выполняется жест- 15 крышке 28 основания 7, подключается к измерительной аппаратуре. Для обким, например болтовым. легчения доступа к подключению измеВертикальный стабилизатор выполнен рительной аппаратуры в основании 7 в виде пластин 19 и 20, приваренных выполнены герметичные люки 29. к трубе 18 несимметрично относительно (горизонтальной плоскости носителя, 2о Носитель работает следующим обра"причем площади пластин 19 и 20 соотзом. носятся, как 3,5:1. Это обеспечивает Сначала выполняют предварительную лучшую стабилизацию аппарата в вертинастройку аппарата, которая заключакальной плоскости. Несимметричный ется в том, что устанавливают крылья профиль пластин 19 и 20 выбирается 25 2 на необходимый угол атаки и одноиз соображений хорошей обтекаемости. временно проверяют их симметрию отноРуль глубины состоит из неподвижсительно несущей плоскости корпуса,, ных пластин 21, имеющих симметричный , закрылки 13 крыла 2 устанавливают в профиль и приваренных к несущей трубе положение выше или ниже их осевого 18 в горизонтальной плоскости носите- 30 положения, закрепляют контейнеры 15 ля. Пластины 21 снабжены концевыми таким образом, что центр тяжести шайбами 29 f на концах которых шарнирмасс перемещается в переднюю часть но установлен закрылок 23, являющийся носителя, закрепляют троссовый зажим в одном из средних отверстий планок продолжением пластин 21. Площади непо17 кронштейна. движных пластин 21 и закрылка 23 соотносятся между собой, как 1:2. На начальном этапе работы крылья 2 устанавливают в положение, соответЗакрылок 23 выполняет функцию руля ствующее положительному углу атаки. глубины. Он кинематически, например, Контейнеры 15 устанавливают на штатчерез тягу 24 и рычаг 25 соединен с ном их креплении, т.е. используются рулевым приводом 26, размещенным в первое и последнее отверстия в паралнесущей трубе 18 хвостового оперения лельных планках 17. Тросовый зажим за4, Угол поворота закрылка 23 составкрепляют в последнем отверстии нижляет +40 относительно горизонтальнего ряда. Закрылки 13 крыла 2 устаной плоскости носителя. навливают на положительный угол атаки, Рулевой привод 26 выполнен в виде равный 5 . электродвигателя с редуктором, соединенного муфтой с винтовым механизДля вытравления троса необходимо, чтобы нагрузка в тросе была наименьмом, который преобразует вращательное шей, для этого закрылок 23 нуля глудвижение электродвигателя в поступабины устанавливают в верхнее положетельное движение штока. Шток соеди50 нен тягой 24 с рычагом 25 закрылка ние, соответствующее его положению на 23, что обеспечивает его поворот воквсплытие (10-15°). После спуска носируг горизонтальной оси, и снабжен теля за борт начинается вытравливание упорами, взаимодействующими с концетроса. Вытравливание троса производитвыми выключателями питания электро55 ся на скорости, равной скорости букдвигателя. сировки. Рулевой механизм снабжен потенциоЗатем проводится методическая букметром, который кинематически при посировка для опробования носителя на мощи гибкой связи и шкивов соединен устойчивость, определение его управ 1519103 ляемости, т.е. работоспособности руля глубины. Проверка его устойчивости производится по значениям углов крена и дифферента, а также по способности к выравниванию этих параметров после подачи команды на заглубление или всплытие. При недостаточной устойчивости необходимо переместить точку буксировки вперед, т.е. закрепить тро-jg совый зажим во второе (и т.д.) отверстие нижнего ряда. После проведения всех этих мероприятий выполняют рабочую буксировку носителя. Рабочая буксировка производится на скорости 8-10 узлов и глубине погружения до 200 м. Буксировка носителя на скорости свыше 10 узлов производится при следующих положениях элементов носителя, 20 повышающих его устойчивость: крылья 2 устанавливают в среднее положение, вспомогательные контейнеры 15 закрепляют в положении, соответствующем скорости буксировки шести узлов. Точку 25 крепления кабель-троса перемещают во второе (и даже в третье) отверстие верхнего ряда планок 17 кронштейна (окончательное ее положение уточняется после методической буксиров*" ' 30 Описанные выше рабочие буксиі>^вки соответствуют траектории движения носителя в режиме сканирования. При буксировке носителя на определенной глубине дополнительно для 35 увеличения его продольной устойчивости возможна установка вставки в разном между средним цилиндром 5 корпуса 1 и хвостовым оперением 4. После общей сборки и опробования 40 аппарата на борту судна производят спуск аппарата за борт и вытравливание грузонесущего кабеля, которое выполняется по ходу судна при скорости не менее четырех-шести узлов. Дли45 на вытравленного грузонесущего кабеля может достигать 400-700 м в зависимости от глубины водной акватории на месте проведения экспедиционных работ По команде оператора из бортовой аппаратуры по грузонесущему кабелю по- 50 ступает сигнал для изменения положения руля глубины, тем самым задается траектория движения аппарата: буксирование по пилообразной траектории или на заданном горизонте. Информация 55 от измерителей передается по грузонесущему кабелю на борт судна, где производится ее регистрация, необхо димая обработка и вывод для оперативного контроля. Контроль за натяжением грузонесущего кабеля производится датчиком натяжения, установленным на борту судна, а получаемая информация выводится на" регистрирующую аппаратуру. Во время проведения буксировочных работ производится регистрация параметров, а также параметров положения аппарата в пространстве. После проведения исследовательских работ производится снижение скорости судна до четырех-шести узлов и выбирание грузонесущего кабеля, а затем подъем аппарата на борт судна. Ф о р м у л а и з о б р е т е н и я 1• Подводный буксируемый аппаратурный носитель, содержащий корпус с хвостовым оперением, выполненный в виде центрального и боковых цилиндров, жестко соединённых между собой при помощи основания обтекаемого профиля, на котором установлен кронштейн для крепления грузонесущего кабеля, выполненный в виде двух параллельных планок с отверстиями, при этом на внешней боковой поверхности каждого бокового цилиндра установлена пластина, на которой закреплено крыло стреловидной формы с закрылком, а на нижней поверхности установлен вертикальный киль, причем хвостовое оперение корпуса включает в себя вертикальный несимметричный относительно корпуса стабилизатор и приводной руль глубины, о т л и ч а ю щ и й с я тем, что, с целью повышения эффективности работы носителя путем улучшения его управляемости, основание корпуса выполнено в виде герметичного цилиндра, торцы которого выполнены в виде полуосей, на которых установлены упомянутые крылья с возможностью их поворота и фиксации в требуемом положении при помощи узла крепления, а каждый вертикальный киль снабжен герметичным контейнером, установленным с возможностью его перемещения в продольном направлении, при этом хвостовое оперение снабжено трубчатым элементов, на котором установлены упомянутые вертикальный стабилизатор и руль глубины, который выполнен с закрылком, кинематически связанным с приводом, установленным в полости упомянутого трубчатого элемента, который соединен" 9 10 1519103 с центральным цилиндром корпуса при помощи разъемного узла крепления, причем каждая из упомянутых планой кронштейна выполнена ступенчатой формы, _ а отверстия в ней выполнены с переменным шагом вдоль ее верхней кромки. 2, Носитель по п.1, о т л и ч а ю щ и й с я тем, что узел крепления крыла на пластине выполнен в виде )Q штырей, установленных в профилированных пазах пластины. 3. Носитель по пп. 1 и 2, о т л ич а ю щ и й с я тем, что профилированные пазы в пластине выполнены по 15 обе стороны от полуоси основания соответственно в носовой и хвостовой частях этой пластины. А. Носитель п о п < 1 , о г л и ч а ю щ и й с я тем, чго верхняя и нижняя части вертикального стабилизатора выполнены с соотношением их площадей 3,5:1. 5. Носитель по п.1, о т л и ч а ю щ и й с я тем, чт^ закрылок и неподвижная часть руля глубины выполнены с соотношением их площадей 2:1. 6. Носитель по п.1, о т л и ч а ю щ и й с я тем, что центральные и боковые цилиндры корпуса разделены основанием нз изолированные герметичные 'отсеки. 7.Носитель по пп. 1 и 6, о т л и ч а ю щ и й с я тем, что в основании выполнены люки. 23 28 Фиг.Г 4 фиг. 3 1519103 23 10 12 SMA фиг. к 9 11 10 І / фиг 5 16 5 Редактор Т.Горчнц фиг 6 Составитель С.Горячев Техред Л.Сердюкова Корректор С.Черни Заказ 2083/ДСП Тираж 241 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д, 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater towed instrument carrier
Автори англійськоюIvanenko Mykhailo Ivanovych, Komiahin Yurii Vasyliovych, Safonov Heorhii Oleksandrovych, Starkov Kostiantyn Oleksandrovych, Hayskyi Vitaliy Oleksandrovych, Blinkov Viktor Oleksandrovych
Назва патенту російськоюПодводный буксируемый аппаратурный носитель
Автори російськоюИваненко Михаил Иванович, Комьягин Юрий Васильевич, Сафонов Георгий Александрович, Старков Константин Александрович, Гайский Виталий Александрович, Блинков Виктор Александрович
МПК / Мітки
МПК: B63B 21/56
Мітки: підводний, буксирований, носій, апаратурний
Код посилання
<a href="https://ua.patents.su/6-14168-pidvodnijj-buksirovanijj-aparaturnijj-nosijj.html" target="_blank" rel="follow" title="База патентів України">Підводний буксирований апаратурний носій</a>
Носій інформації
Номер патенту: 2071
Опубліковано: 26.12.1994
Автори: Харитонський Сергій Якович, Леснік Наталія Андріевна
МПК: G11C 11/02
Мітки: носій, інформації
Формула / Реферат:
1. Носитель информации, содержащий диэлектрическую подложку и нанесенный на нее чувствительный к радиоизлучению слой сплава ферромагнитных материалов с ядерным магнитным моментом, отличающийся тем, что, с целью повышения его надежности, в него введены изолирующие слои диэлектрика и дополнительные чувствительные к радиоизлучению слои сплава ферромагнитных материалов с ядерным магнитным моментом, нанесенные поочередно на чувствительный к...
Носій інформації
Номер патенту: 4418
Опубліковано: 27.12.1994
Автори: Харитонський Сергій Якович, Леснік Наталія Андрієвна
МПК: G11C 11/02
Мітки: носій, інформації
Формула / Реферат:
Носитель информации, содержащий диэлектрическую подложку и нанесенный на нее чувствительный к радиоизлучению слой, выполненный из сплава ферромагнитных материалов группы железа (Fе, Nі, Со) с ядерным магнитным моментом, отличающийся тем, что, с целью повышения чувствительности носителя информации, он содержит корректирующий слой, выполненный из сплава редкоземельных металлов (Gd, Dу, Тb, Но и др.), ферромагнитного при комнатной...
Блочний металевий носій для каталізатору очистки відхідних газів та спосіб його виготовлення
Номер патенту: 2572
Опубліковано: 26.12.1994
Автори: Шульман Олександр Семенович, Гайворонська Римма Васильовна, Голік Валерій Павлович, Соловйов Геннадій Іванович
МПК: B01J 35/00, B01J 37/00, B01D 35/00, B01J 32/00
Мітки: каталізатору, відхідних, виготовлення, очистки, металевій, блочний, спосіб, носій, газів
Формула / Реферат:
1. Блочный металлический носитель для катализатора очистки отходящих газов из жаростойких металлических материалов с развитой внешней поверхностью отличающийся тем, что он выполнен в виде брикета из прессованных стружек нержавеющей стали.2. Способ изготовления блочного металлического носителя для катализатора очистки отходящих газов из жаростойких металлических материалов с развитой внешней поверхностью, отличающийся тем, что в...
Клиновий коуш
Номер патенту: 8189
Опубліковано: 29.03.1996
Автор: Ком'ягін Юрій Васильович
МПК: B66B 7/06
Формула / Реферат:
Клиновой коуш, содержащий корпус с размещенным в нем клином со съемными вставками, зажим и фиксирующий узел, отличающийся тем, что, с целью расширения области использования, съемные вставки клина выполнены с канавками и смонтированы одни - на внутренних рабочих поверхностях корпуса коуша, а другие - напротив них на внешних рабочих поверхностях клина, причем зажим установлен на верхней части клина, а фиксирующий узел установлен на его...
Пристрій для запису-відтворення на дисковий носій інформації
Номер патенту: 4357
Опубліковано: 27.12.1994
Автор: Брусиловський Мірон Ісаакович
МПК: G11B 25/04
Мітки: носій, дисковий, запису-відтворення, пристрій, інформації
Формула / Реферат:
Устройство для записи-воспроизведения на дисковый носитель информации, содержащее держатель с установочной поверхностью и осью вращения, сопряженный с ним приводной фрикционный ролик, закрепленный на каретке, сопряженный с ходовым винтом, элемент записи-воспроизведения, установленный на указанной каретке, электродвигатель и кинематически связанный сним приводной вал, установленный с возможностью вращения и продольного перемещения...
Попередній патент: Пристрій для виміру сигналів тензомісту
Наступний патент: Спосіб виміру швидкості звуку і пристрій для його виконання
Випадковий патент: Спосіб побудови та експлуатації імітатора стрільби і ураження