Модель локального аналізатора
Номер патенту: 22183
Опубліковано: 30.06.1998
Автори: Ляховецький Роман Васильович, Зима Валентин Леонідович


Формула / Реферат
Модель локального аналізатора, виконана у вигляді трирядного перцептрона на основі аналогових нейроподібних елементів, кожний 1-й сенсорний елемент першого ряду має в собі джерело напруги, кероване вихідним сигналом датчика-рецептора, наприклад, фоторезистора, і квадратор, наприклад, польовий транзистор, струм на виході якого пропорційний квадрату вихідної напруги сенсорного елемента, вихід кожного квадратора з'єднано з Інвертуючим входом спільного суматора, кожний j-й фільтруючий елемент другого ряду має в собі суматор з ваговими ij-резисторами на вході для зв'язку з кожним сенсорним елементом, причому провідність кожного ij-резистора вибрана так, щоб напруга на виході j-ro фільтруючого елемента була пропорційна j-му коефіцієнту Фур'є від пред'явленого h-ro вхідного сигналу, кожний h-й детекторний елемент третього ряду має в собі інтегратор з ваговими jh-резисторами на вході для зв'язку з кожним фільтруючим елементом, причому провідність кожного jh-резистора вибрана так, щоб h-й ваговий вектор був колінеарний вектору коефіцієнтів Фур'є h-ro вхідного сигналу, паралельно інтегруючому конденсатору кожного детекторного елемента включені пороговий ключ - тиристор і розрядний ключ - польовий транзистор, затвор якого з'єднано із спільною шиною, яка відрізняється тим, що пороговий ключ - тиристор виконано на основі двох біполярних транзисторів і керуючий електрод цього тиристора, який є виходом детекторного елемента, з'єднано з затвором вихідного польового транзистора і з'єднано, через перше джерело струму, з шиною порогової напруги, витік вихідного польового транзистора з'єднано з шиною живлення або з шиною порогової напруги, а стік - з спільною шиною, яка з'єднана, через друге джерело струму, із шиною живлення, вхід спільного суматора з'єднано, через третє джерело струму, з шиною живлення, всі датчики-рецептори живляться з виходу спільного суматора.
Текст
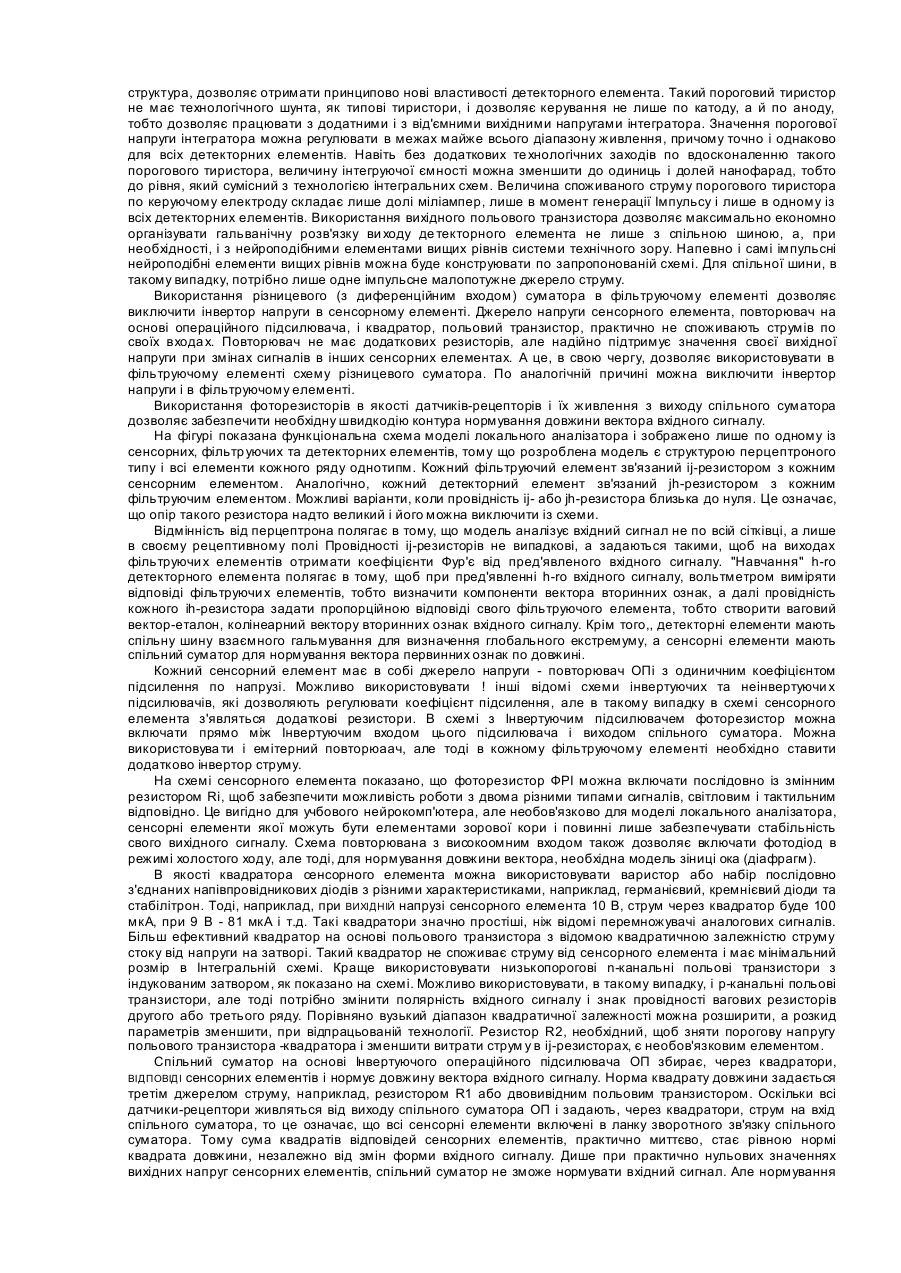
Винахід відноситься до моделей нервової системи, призначений для моделювання Інформаційних процесів в елементах зорового аналізатора і може бути схемотехнічною основою для конструкторської та технологічної розробки учбового нейрокомп'ютера. Винахід також можна використовувати, як елемент в системах технічного зору, призначених для автоматизації виробництва, для безпеки автомобільного руху і для військових цілей. Відома така модель нервової системи, як трьохрядний перцептрон [1], який має перший ряд сенсорних елементів, другий ряд асоціативних і третій ряд реагуючи х елементів. Кожний, тобто і-й, сенсорний елемент є джерелом напруги, керованим вихідним сигналом датчика-рецептора. Лінійка або матриця датчиківрецепторів перетворює вхідний сигнал в n-мірний вектор первинних ознак. Кожний, тобто j-й, асоціативний елемент має суматор з ваговими ij-резисторами, що дозволяє йому виконувати операцію скалярного перемноження вектора первинних ознак на свій ваговий вектор. Таким чином колонка асоціативних елементів повертає систему координат і створює вектор вторинних ознак. Матрицю ljрезисторів можна оптимізувати, що дозволяє значно зменшити час "навчання", розмірність простору вторинних ознак, а отже об'єм і вартість перцептрона. Кожний, тобто h-й, реагуючий елемент може бути виконаний як Інтегратор з ваговими резисторами на вході і з імпульсним виходом. На виходах реагуючи х елементів можна включити компаратор, який зменшує величину порогової напруги до тих пір, поки не спрацює необхідний процент реагуючи х елементів. Ваговий вектор h-ro реагуючого елемента, в процесі "навчання", формується так, щоб отримати необхідний коефіцієнт кореляції з вектором вторинних ознак h-ro вхідного сигналу. Недолік цього аналогу - не вра ховуються сучасні результати досліджень структури та функцій локальних аналізаторів і тому невідомо, якими мають бути вагові вектори елементів другого та третього рядів. Тому необхідні операції оптимізації та "навчання", які значно збільшують час та вартість виготовлення перцептрона і не гарантують потрібного рівня якості. Відомі результати досліджень і відповідні моделі [2], згідно яких нейрони зорової кори дають максимальну ВІДПОВІДЬ лише тоді, коли вектор вхідного сигналу в їх рецепторному полі співпадає з їх ваго вим вектором. Цей аналог має недостатньо конкретних даних, щоб створювати е фективні технічні пристрої. Відомі результати досліджень і відповідні моделі [3], згідно яких колонка фільтруючих нейронів, в своєму рецептивному полі, виконує розклад вхідного сигналу в ряд Фур'є. Кодування вхідного сигналу коефіцієнтами Фур'є зменшує кількість координат простору вторинних ознак. Але по цьому локальному механізму, як і по механізму нормування яскравості вхідного сигналу, мало конкретних даних. Відома конкретніша модель локального аналізатора перцептроного типу [4], в якій кожний елемент третього ряду є нейроном-детектором. Реакція h-ro детекторного елемента максимальна лише тоді; коли вектор вторинних ознак h-ro вхідного сигналу і ваговий вектор h-ro детекторного елемента колінеарні. Елементи другого ряду створюють ортонормовану систему координат. Детекторні елементи зв'язані між собою гальмівними зв'язками, щоб підвищити селективність детекторного елемента до свого "ключового" сигналу. Система паралельно працюючих локальних аналізаторів більш надійна і швидкодіюча, ніж система технічного зору на основі цифрової обчислювальної машини. Цей аналог теж практично немає конкретних технічних рішень. Відома модель локального аналізатора (прототип),- виконана у вигляді лабораторного макету трьохстадійного конвеєра векторних процесорів [5]. Кожний аналоговий нейроподібний елемент такої моделі є векторним процесором для скалярного перемноження вектора сигналу на свій ваговий вектор. На третій стадії конвеєру, детекторні елементи, об'єднані спільною шиною, практично миттєво виконують класифікацію вхідного сигналу. Колонка фільтруючих елементів другої стадії є пристроєм підготовки даних для стадії класифікації і миттєво кодує вхідний сигнал єдиним кодом - кодом коефіцієнтів Фур'є. Лінійка або матриця сенсорних елементів першої стадії є пристроєм підготовки даних для стаді; фільтрації (виділення вторинних ознак) і миттєво створює вектор первинних ознак з неперервного зображення. Крім того, на цій стадії векторизації можливо нормування вектора первинних ознак по довжині за допомогою спільного суматора. Контур нормування довжини вектора має світлорегулятор і джерело світла з малою швидкодією. В кожному сенсорному елементі прототипа є джерело напруги на основі Інвертуючого операційного підсилювача, інвертор напруги і більше десятка комплектуючи х виробів, в основному постійних резисторів, що збільшує вартість і величину споживаного струму. Перша експериментальна матриця із 1000 сенсорних елементів споживала струм майже 10 А. Необхідність інвертора напруги в сенсорному елементі викликана неоптимальною схемою суматора фільтруючого елемента з одним входом. По аналогічній причині є інвертор напруги і в фільтруючому елементі. Пороговом ключем в кожному детекторному елементі є одноперехідний транзистор, котрий постійно споживає струм в декілька міліампер. Цей одноперехідний транзистор об'єднано, разом з малопотужним тиристором, в одному корпусі під назвою гібридний пороговий тиристор. Значний імпульсний струм цього тиристора (десятки міліампер) вимагає величини ємності інтегруючого конденсатора і конденсатора спільної шини в одиниці мікрофарад кожний. Таким чином, неоптимальлість схем нейроподібних елементів змушує використовувати великі струми і великі ємності конденсаторів, а також додаткові комплектуючі вироби, що утруднює розробку моделі локального аналізатора у вигляді великої інтегральної схеми. Це, в свою чергу, утр уднює створення економної системи технічного зору, яка б мала хоча б сотні паралельно працюючих локальних аналізаторів. В основу винаходу поставлено задачу: зменшити кількість і розміри комплектуючих виробів і зменшити споживаний струм моделі локального аналізатора, шляхом оптимізації схем нейроподібних елементів, настільки, щоб забезпечити можливість виготовлення кожного нейроподібного елемента у вигляді економної непівзамовлюваної інтегральної схеми. Це дозволить виготовити всю модель локального аналізатора у вигляді великої інтегральної схеми і дозволить приступити до розробки учбового нейрокомп'ютера, основні ідеї та елементи якого можна буде в майбутньому використовувати в системах те хнічного зору. Заміна гібридного порогового тиристора двома біполярними транзисторами, включеними як тиристорна структура, дозволяє отримати принципово нові властивості детекторного елемента. Такий пороговий тиристор не має технологічного шунта, як типові тиристори, і дозволяє керування не лише по катоду, а й по аноду, тобто дозволяє працювати з додатними і з від'ємними вихідними напругами інтегратора. Значення порогової напруги інтегратора можна регулювати в межах майже всього діапазону живлення, причому точно і однаково для всіх детекторних елементів. Навіть без додаткових те хнологічних заходів по вдосконаленню такого порогового тиристора, величину інтегруючої ємності можна зменшити до одиниць і долей нанофарад, тобто до рівня, який сумісний з технологією інтегральних схем. Величина споживаного струму порогового тиристора по керуючому електроду складає лише долі міліампер, лише в момент генерації Імпульсу і лише в одному із всіх детекторних елементів. Використання вихідного польового транзистора дозволяє максимально економно організувати гальванічну розв'язку ви ходу де текторного елемента не лише з спільною шиною, а, при необхідності, і з нейроподібними елементами вищих рівнів системи технічного зору. Напевно і самі імпульсні нейроподібні елементи вищих рівнів можна буде конструювати по запропонованій схемі. Для спільної шини, в такому випадку, потрібно лише одне імпульсне малопотужне джерело струму. Використання різницевого (з диференційним входом) суматора в фільтруючому елементі дозволяє виключити інвертор напруги в сенсорному елементі. Джерело напруги сенсорного елемента, повторювач на основі операційного підсилювача, і квадратор, польовий транзистор, практично не споживають струмів по своїх входа х. Повторювач не має додаткових резисторів, але надійно підтримує значення своєї вихідної напруги при змінах сигналів в інших сенсорних елементах. А це, в свою чергу, дозволяє використовувати в фільтруючому елементі схему різницевого суматора. По аналогічній причині можна виключити інвертор напруги і в фільтруючому елементі. Використання фоторезисторів в якості датчиків-рецепторів і їх живлення з виходу спільного суматора дозволяє забезпечити необхідну швидкодію контура нормування довжини вектора вхідного сигналу. На фігурі показана функціональна схема моделі локального аналізатора і зображено лише по одному із сенсорних, фільтр уючих та детекторних елементів, тому що розроблена модель є структурою перцептроного типу і всі елементи кожного ряду однотипм. Кожний фільтруючий елемент зв'язаний ij-резистором з кожним сенсорним елементом. Аналогічно, кожний детекторний елемент зв'язаний jh-резистором з кожним фільтруючим елементом. Можливі варіанти, коли провідність ij- або jh-резистора близька до нуля. Це означає, що опір такого резистора надто великий і його можна виключити із схеми. Відмінність від перцептрона полягає в тому, що модель аналізує вхідний сигнал не по всій сітківці, а лише в своєму рецептивному полі Провідності ij-резисторів не випадкові, а задаються такими, щоб на виходах фільтруючи х елементів отримати коефіцієнти Фур'є від пред'явленого вхідного сигналу. "Навчання" h-ro детекторного елемента полягає в тому, щоб при пред'явленні h-ro вхідного сигналу, вольтметром виміряти відповіді фільтруючи х елементів, тобто визначити компоненти вектора вторинних ознак, а далі провідність кожного ih-резистора задати пропорційною відповіді свого фільтруючого елемента, тобто створити ваговий вектор-еталон, колінеарний вектору вторинних ознак вхідного сигналу. Крім того,, детекторні елементи мають спільну шину взаємного гальмування для визначення глобального екстремуму, а сенсорні елементи мають спільний суматор для нормування вектора первинних ознак по довжині. Кожний сенсорний елемент має в собі джерело напруги - повторювач ОПі з одиничним коефіцієнтом підсилення по напрузі. Можливо використовувати ! інші відомі схеми інвертуючих та неінвертуючи х підсилювачів, які дозволяють регулювати коефіцієнт підсилення, але в такому випадку в схемі сенсорного елемента з'являться додаткові резистори. В схемі з Інвертуючим підсилювачем фоторезистор можна включати прямо між Інвертуючим входом цього підсилювача і виходом спільного суматора. Можна використовува ти і емітерний повторюаач, але тоді в кожному фільтруючому елементі необхідно ставити додатково інвертор струму. На схемі сенсорного елемента показано, що фоторезистор ФРІ можна включати послідовно із змінним резистором Ri, щоб забезпечити можливість роботи з двома різними типами сигналів, світловим і тактильним відповідно. Це вигідно для учбового нейрокомп'ютера, але необов'язково для моделі локального аналізатора, сенсорні елементи якої можуть бути елементами зорової кори і повинні лише забезпечувати стабільність свого вихідного сигналу. Схема повторювана з високоомним входом також дозволяє включати фотодіод в режимі холостого ходу, але тоді, для нормування довжини вектора, необхідна модель зіниці ока (діафрагм). В якості квадратора сенсорного елемента можна використовувати варистор або набір послідовно з'єднаних напівпровідникових діодів з різними характеристиками, наприклад, германієвий, кремнієвий діоди та стабілітрон. Тоді, наприклад, при ВИХІДНІЙ напрузі сенсорного елемента 10 В, струм через квадратор буде 100 мкА, при 9 В - 81 мкА і т.д. Такі квадратори значно простіші, ніж відомі перемножувачі аналогових сигналів. Більш ефективний квадратор на основі польового транзистора з відомою квадратичною залежністю струму стоку від напруги на затворі. Такий квадратор не споживає струму від сенсорного елемента і має мінімальний розмір в Інтегральній схемі. Краще використовувати низькопорогові n-канальні польові транзистори з індукованим затвором, як показано на схемі. Можливо використовувати, в такому випадку, і р-канальні польові транзистори, але тоді потрібно змінити полярність вхідного сигналу і знак провідності вагових резисторів другого або третього ряду. Порівняно вузький діапазон квадратичної залежності можна розширити, а розкид параметрів зменшити, при відпрацьованій технології. Резистор R2, необхідний, щоб зняти порогову напругу польового транзистора -квадратора і зменшити витрати струм у в ij-резисторах, є необов'язковим елементом. Спільний суматор на основі Інвертуючого операційного підсилювача ОП збирає, через квадратори, ВІДПОВІДІ сенсорних елементів і нормує довжину вектора вхідного сигналу. Норма квадрату довжини задається третім джерелом струму, наприклад, резистором R1 або двовивідним польовим транзистором. Оскільки всі датчики-рецептори живляться від виходу спільного суматора ОП і задають, через квадратори, струм на вхід спільного суматора, то це означає, що всі сенсорні елементи включені в ланку зворотного зв'язку спільного суматора. Тому сума квадратів відповідей сенсорних елементів, практично миттєво, стає рівною нормі квадрата довжини, незалежно від змін форми вхідного сигналу. Дише при практично нульових значеннях вихідних напруг сенсорних елементів, спільний суматор не зможе нормувати вхідний сигнал. Але нормування потрібне, щоб виключити можливість перенапруг в сенсорних та в фільтруючи х елементах, а отже і спотворень вхідного сигналу, що знижує надійність розпізнавання. Простір первинних ознак має велику кількість координат і може мати в собі високочастотні завади. Це вимагає великої КІЛЬКОСТІ jh-резисторів і зменшує надійність розпізнавання. Кодування вхідного сигналу коефіцієнтами Фур'є дозволяє значно зменшити кількість координат в новому просторі вторинних ознак. Наприклад, нормована смужка в рецептивному полі із 1000 сенсорних елементів кодується відповіддю лише одного фільтруючого елемента і без завад. Якщо система базисних функцій фільтруючих елементів ортонормована, то нормований вектор вхідного сигналу, після зміни системи координат, або не змінить своєї довжини, або зменшиться, якщо кількість фільтруючих елементів недостатня для його точного опису. Якщо використовува ти тригонометричну ортонормовану систему координат, то, для дискретного одномірного вхідного сигналу і для довільного проміжку [-І, І], парний а або непарний b коефіцієнти Фур'є визначаються по формулах: де і - номер сенсорного елемента або відліку вхідного сигналу; j - номер фільтруючого елемента або коефіцієнта Фур'є. Отже, j-й коефіцієнт Фур'є буде на виході j-ro фільтруючого елемента лише тоді, коли провідність кожного його вагового ij-резистора буде визначено по формулах: Оскільки, на схемі показано лише один і-й сенсорний елемент і один j-й фільтруючий елемент, то провідність їх ij-резистора відмічено умовно, як його довжину. Якщо, для першого непарного фільтруючого елемента, відмітити пропорційними відрізками всі інші провідності його вагових резисторів, то отримаємо графік тригонометричної Функції що і показано на схемі. При додатному значенні такий резистор підключається правим виводом до неінвертуючого входу суматора, а при від'ємному - до інвертуючого. Можна використати і обернений варіант включення ij-резисторів, але тоді потрібно поміняти знаки і jh-резисторів. Якщо кожен фільтруючий елемент дасть свій коефіцієнт Фур'є, то колонка фільтруючих елементів дасть ряд Фур'є, який є наближеним описом вхідного сигналу. Малоінформативна постійна складова тут не враховується. Аналогічно можна використовувати і Інші одномірні або двомірні ортонормовані базисні функції, наприклад, Ерміта, Кравчука і т.п. Але згідно [2], двомірні тригонометричні функції типу найбільш подібні до вагових функцій тих рецептивних полів, які виявлено в зоровій корі. Індекс в або г вказує на рахунок по вертикалі або по горизонталі відповідно. Оскільки в аналоговій електроніці суматором є інвертуючий операційний підсилювач з ваговими резисторами на "вході, то вихід такого суматора є джерелом напруги, керованим значенням скалярного добутку вектора вхідного сигналу на свій ваговий вектор. Кращий варіант різницевого суматора, коли сумарна провідність вагових резисторів на інвертуючому вході і резистора зворотного зв'зяку R1j рівна сумарній провідності вагових резисторів на неінвертуючому вході і компенсуючого резистора R2j. Резистор R2j можна виключити Із схеми, але тоді кількість номіналів вагових ij-резисторів зросте вдвічі, щоб сумарні провідності по обох входа х залишились рівні. Для моделі локального аналізатора з однією колонкою фільтруючих елементів, всі вхідні сигнали повинні бути нормованими по зсуву, по масштабу, а в двомірному варіанті, і по повороту. Класичним інтегратором в аналоговій електррніці є інвертуючий операційний підсилювач з інтегруючим конденсатором в ланці зворотнього зв'язку. Низькі вихідні опори фільтруючих елементів дозволяють ставити вагові ij-резистори на оба входи Інтегратора детекторного елемента, так як це зроблено в фільтруючих елементах. Але в фільтруючих елементах провідності резисторів на обох входа х однакові, тоді як в детекторних елементах навпаки, в більшості випадків сумарні провідності не однакові. Тому для учбового нейрокомп'ютера вигідніше, на інвертуючому вході Інтегратора, поставити інвертор струму, як показано на схемі. Так як опір вихідного резистора R2h рівний опору резистора R1h в ланці зворотного зв'язку операційного підсилювача ОП1h, який є Інвертором струму, то в такому інтеграторі отримаємо два потенційно заземлених входи. Це спрощує розрахунок вагових jh-резисторів, тобто "навчання" детекторних елементів. Наприклад, для вхідного сигналу хі, який показано на схемі, відповідь першого непарного і третього непарного фільтруючи х елементів будуть рівними ВІДПОВІДНО +9,: В і -2,8 В. Відповіді всіх Інши х фільтруючих елементів будуть практична нульовими. Якщо за норму вхідного струму детекторного елемента взяти -ІмА, то колінеарний вектор провідностей даного детекторного елемента буде мати компоненти 95 мСм 128 мСм, або опори 10,5 кОм і 35,7 кОм відповідно. Струм від першого непарного фільтруючого елемента +0,9 мА пройде через інвертор струму і отримаємо -0,9 мА. Струм від третього непарного фільтруючого елемента -0,08 мА пройде прямо на інвертуючий вхід Інтегратора ОП2h. Сумарний струм -0,98 мА менший від норми, тому що взято всього два коефіцієнта Фур'є. Опори вагових jh-резисторів можна б було взяти 1 більшими, наприклад, 105 і 357 кОм відповідно, тоді норма струму зменшилась би на порядок, але основна вимога полягає в тому, щоб коефіцієнт пропорційності між вихідними напругами фільтруючих елементів і провідностями вагових jhрезисторів всіх детекторних елементів був однаковим. Від'ємний струм на вході інтегратора дасть додатну ви хідну напругу і коли її значення на аноді тиристора перевищить на 0,5 В порогову напругу на керуючому електроді, то пороговий ключ - тиристор відкриється і розрядить Інтегруючий конденсатор Ch. Щоб пояснити цю властивість порогового ключа - тиристора, на схемі, поруч з детекторним елементом, зображена тиристорна структура Із двох біполярних транзисторів. Таке включення тиристора називається варіантом з керуванням по аноду. Катод порогового тиристора і витік розрядного польового транзистора T1h підключені до потенційно заземленого входу Інтегратора. ПІдложка цього транзистора підключена, як звичайно для n-канальних польових транзисторів з Індукованим каналом, до від'ємної шини живлення. В такому випадку, при заряді Інтегруючого конденсатора Ch струмом любої полярності, через пороговий тиристор D1 h і розрядний польовий транзистор Т1h струм практично не протікає, Для типових операційних підсилювачів бажано, щоб порогова напруга була на один-два вольти менша від напруги живлення. Керуючий електрод з'єднується з шиною порогової напруги через перше джерело струму, наприклад, через прискорюючий резистор R3h або через двовивідний польовий транзистор. Лише при умові, що напруга на інтегруючому конденсаторі, при його заряді, стане більшою, ніж порогова напруга, з'явиться базовий, а отже і колекторний, струми верхнього транзистора тиристорної структури. Зразу ж зростуть базовий та колекторний струми нижнього транзистора і пороговий тиристор практично миттєво (одиниці мікросекунд) відкривається. Із-за цього напруги на Інтегруючому конденсаторі та на керуючому електроді впадуть практично до нуля. Після розряду конденсатора, тиристор автоматично запирається. Чим більший струм через керуючий електрод, тим швидше розпорошується просторовий заряд в тиристорі, створений розрядним струмом, і тим менша тривалість вихідного імпульсу на керуючому електроді. Наприклад, при струмі керуючого електроду десяті долі міліампера, тривалість імпульсу - десятки мікросекунд. При необхідності, вихідний імпульс можна розширити, якщо між керуючим електродом та шиною "землі" включити додатковий конденсатор з ємністю приблизно втричі меншою, ніж ємність Інтегруючого конденсатора. Отриманий таким чином вузький вихідний імпульс, майже трикутної форми, подається з керуючого електроду на затвор р-канального вихідного польового транзистора T2h. Витік і підложка цього транзистора з'єднані, як звичайно, з додатною шиною живлення, а стік, через друге джерело струму, наприклад, через резистор R3 або через двовивідний польовий транзистор, з'єднано з від'ємною шиною живлення. Як тільки різке зменшення напруги на керуючому електроді перевищить поріг вихідного польового транзистора T2h, то цей транзистор відкривається і буде відкритим до тих пір, поки, збільшення напруги на керуючому електроді, не закриє цей транзистор. Таким чином, на спільній шині формується додатній прямокутний імпульс, амплітуда струм у якого визначається другим джерелом струму. Спільною шиною тут називається відрізок провідника, яким з'єднано між собою затвори всіх розрядних польових транзисторів і стоки всіх ви хідних польових транзисторів. Можна витік вихідного польового транзистора з'єднати з шиною порогової напруги. В такому випадку регулювання порогової напруги не приведе до того, що в якийсь момент ця порогова напруга стане меншою від порогу ви хідного польового транзистора і не дасть цьому транзистору закритись. Але в цьому варіанті вихідні польові транзистори будуть додатково навантажувати шину порогової напруги. Якщо в стік вихідного польового транзистора T2h включити світлодіод D2h, то необхідною величиною струму будуть одиниці міліампер і працюючий детекторний елемент покаже себе цим СВІТЛОД ІОДОМ. Якщо контролювати виходи детекторних елементів частотоміром або подавати ці виходи на вищі рівні системи технічного зору, то світлодіоди не потрібні i значення струму в спільній шині можна на один-два порядки зменшити, тому що затвори розрядних польових транзисторів струм практично не споживають. Виникнення додатного імпульсу на спільній шині відкриває всі розрядні польові транзистори і всі Інтегруючі конденсатори розряджаються без генерації вихідних Імпульсів , Таким чином всі інтегруючі конденсатори одночасно приводяться у ви хідне положення - нуль заряду. Після цього, конкуренція між детекторними елементами, за право згенерувати слідуючий Імпульс, розпочинається в новому циклі. Так як ємності всіх інтегруючих конденсаторів і порогові напруги на всіх керуючих електродах рівні, то найшвидше досягне порогового рівня напруга на інтегруючому конденсаторі того детекторного елемента, де максимальний зарядний струм, тобто там, де максимальне значення скалярного добутку вектора вторинних ознак на ваговий вектор провідностей. Оскільки ваговий вектор детекторного елемента формується як еталон для свого вхідного сигналу, то, при пред'явленні вхідного сигналу, буде генерувати імпульси лише той детекторний елемент, вектор-еталон якого буде мати найменший кут з вектором вхідного сигналу. Можливий варіант використання порогового тиристора з керуванням по катоду, коли керуючим електродом є база нижнього транзистора. Але все рівно і в такому випадку необхідно поки що використовува ти тиристорну структуру з дво х біполярних транзисторів, тому що в типових тиристорах є технологічний шунт між керуючим електродом і катодом. Для варіанту з керуванням по катоду не досить поміняти місцями анод і катод порогового тиристора, розрядний і вихідний польові транзистори. Необхідно також, щоб робоча напруга на виході інтегратора і напруга на пороговій шині були від'ємними. Якщо, в якості джерел струму керуючи х електродів та спільнот шини, використовуються двовивідні польові транзистори, то їх виводи і виводи світлодіода теж необхідно поміняти місцями. Таким чином, вибираючи один або другий варіанти керування тиристором, можна створювати моделі нейронів, для яких одні і тіж сигнали будуть або збуджуючими, або гальмівними. Модель локального аналізатора працює як конвеєр векторних процесорів. На першій стадії, лінійка або матриця сенсорних елементів, працюючи одночасово, формує вектор первинних ознак, компонентами якого є вихідні напруги сенсорних елементів. Довжина цього вектора, практично миттєво, нормується спільним суматором по еталону. Колонка фільтруючих елементів другої стадії кодує вхідний сигнал коефіцієнтами Фур'є, тобто практично миттєво повертає систему координат так, щоб зменшити кількість координат і відфільтрува ти високочастотні завади. Таким чином формується вектор вторинних ознак, компонентами якого є вихідні напруги фільтруючи х елементів. Ряд детекторних елементів, об'єднаних спільною шиною, є третьою стадією конвеєра і класифікує вхідний сигнал по його вторинних ознаках. Тут теж вектор вхідного сигналу одночасово порівнюється з усіма ваговими векторами-еталонами і відповідає, наприклад, світиться світлодіод, лише той детекторний елемент, для якого даний вхідний сигнал є "ключем". Модель локального аналізатора дозволяє в деяких учбови х експериментах не використовувати живі організми. Наприклад, щоб визначити вагову функцію якого-небудь нейрона зорового аналізатора, необхідно [2,3] поодинці збуджувати кожний окремий сенсорний елемент із рецептивного поля даного нейрона. Таку операцію, як показала практика, можна виконувати і на моделі локального аналізатора. Оскільки запропонована модель є досить точною, то це дозволяє ставити деякі питання до сучасних гіпотез по елементах зорового аналізатора. Наприклад, згідно роботи [3], горизонтальна клітина сітківки збирає відповіді рецепторів, з потім, деполяризуючи рецептори, зменшує їх збудження. Таким чином здійснюється адаптація до рівня освітленності. Але ж, щоб нормувати довжину вектора, необхідно оперувати не з сумою відповідей, а з сумою квадратів відповідей? В роботі [4] вважається, що вектори провідностей детекторних елементів повинні бути нормовані. Тобто, після фільтрації, вхідний сигнал залишиться > рівний нормі. Але ж це можливо лише тоді, коли кількість фільтруючи х елементів рівна кількості сенсорних елементів. Запропоновану модель можна використовувати в якості учбового нейрокомп'ютера для демонстрації процесу розпізнавання. Якщо задавати вхідний сигнал лише через фоторезистори, то повзунки змінних резисторів Ri необхідно пересунути, як показано на схемі, вверх до кінця. Якщо задавати вхідний сигнал лише змінними резисторами, то всі фо торезистори повинні бути однаково підсвічені. В цей час, вхід спільного суматора необхідно від'єднати від квадраторів, щоб можна було точно контролювати вольтметром вихід кожного сенсорного елемента. При менших вимогах до точності, можна проградуювати положення повзунків і так задавати вхідний сигнал, не відключаючи квадратори від спільного суматора. Можна задавати змінними резисторами рівень вхідного сигналу, а через фоторезистори рівень динамічного шум у. Процес "навчання" в даній моделі максимально спрощено і для відомих вхідних сигналів можна навіть заздалегідь розраховувати коефіцієнти Фур'є і впаювати відповідні jh-резистори. Створення моделі локального аналізатора відкриває шлях до створення більш ефективних систем технічного зору, де локальні аналізатори, як і модулі зорової" кори [2-4], будуть лише окремими елементарними функціональними структурами. Наприклад, збираючи квадрати відповідей колонок фільтруючи х елементів, рівномірно розміщених по всьому полю зору, можна визначити колонку з максимальною відповіддю. Це дозволяє керувати окоруховим апаратом і здійснювати нормування по зсуву. Моделюючи процес пульсації розмірів рецептивних полів в зовнішньому колінчатому тілі, можна здійснювати нормування і по масштабу. Моделюючи властивості локальних механізмів зон V1, V2 і V3 зорової кори, можна аналізувати вхідний сигнал, елементи якого мають різні розміри, зсуви та повороти в площині. Згідно гіпотези фреймів М.Мінського, саме система локальних аналізаторів мусить бути розміщена між вхідним сигналом та фреймами, щоб нормувати зміну ракурсу, розпізнавати сцени та сценарії.
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator of a local analyzer
Автори англійськоюLiakhovetskyi Roman Vasyliovych, Zyma Valentyn Leonidovych
Назва патенту російськоюМодель локального анализатора
Автори російськоюЛяховецкий Роман Васильевич, Зима Валентин Леонидович
МПК / Мітки
МПК: G06F 17/14, G06G 7/60
Мітки: модель, аналізатора, локального
Код посилання
<a href="https://ua.patents.su/6-22183-model-lokalnogo-analizatora.html" target="_blank" rel="follow" title="База патентів України">Модель локального аналізатора</a>
Модель нейрона
Номер патенту: 22956
Опубліковано: 05.05.1998
Автори: Василецький Сергій Анатолійович, Нізельський Микола Броніславович, Кожем'яко Володимир Прокопович, Колесницький Олег Костянтинович
МПК: G09B 23/26, G06G 7/60
Формула / Реферат:
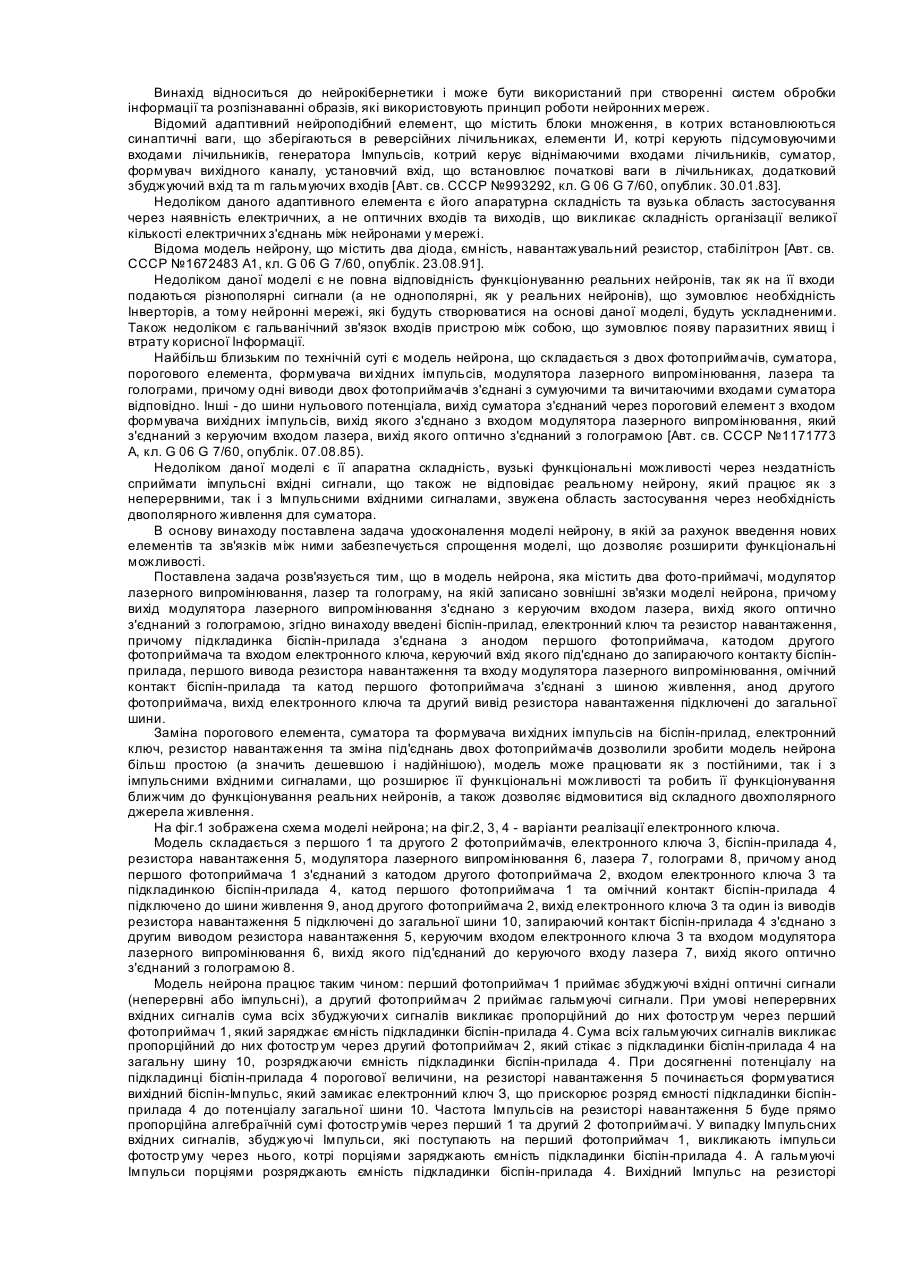
Модель нейрона, що містить два фотоприймачі, модулятор лазерного випромінювання, лазер та голограму, на якій записано зовнішні зв'язки моделі нейрону, причому вихід модулятора лазерного випромінювання з'єднано з керуючим входом лазера, вихід якого оптично з'єднаний з голограмою, яка відрізняється тим, що в нього введені біспін-прилад, електронний ключ та резистор навантаження, причому підкладинка біспін-приладу з'єднана з анодом першого...
Пристрій для неадекватного подразнення вестибулярного аналізатора
Номер патенту: 4083
Опубліковано: 27.12.1994
Автори: Гурик Володимир Васильович, Рікберг Анатолій Борухович, Райчук Борис Федорович, Бакай Едуард Аполінарійович, Мухін Вадим Іванович, Якубович Модест Модестович, Гацанюк Сергій Григорович, Гацуленко Володимир Васильович
МПК: A61B 5/16
Мітки: пристрій, аналізатора, подразнення, неадекватного, вестибулярного
Формула / Реферат:
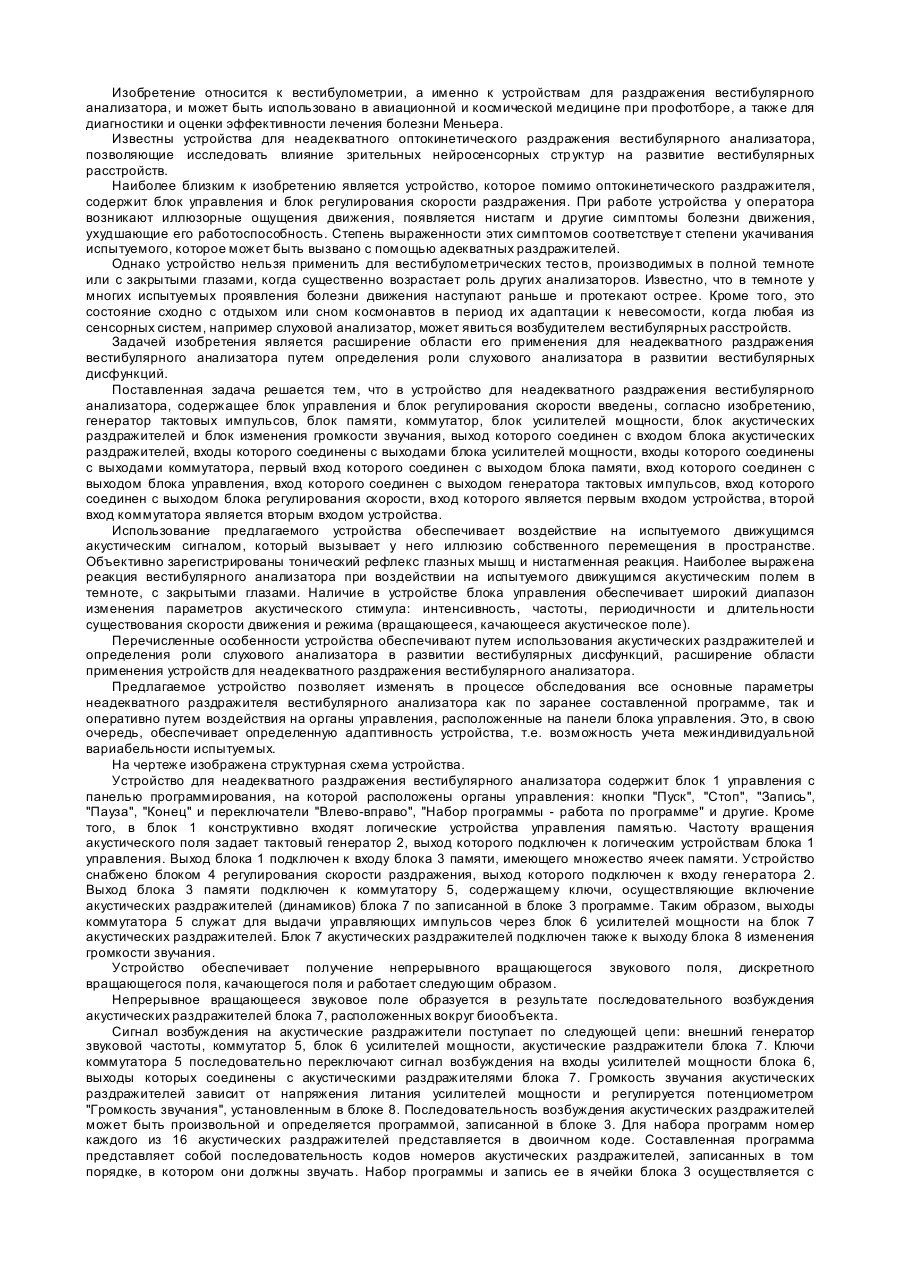
Устройство для неадекватного раздражения вестибулярного анализатора, содержащее блок управления, блок регулирования скорости, отличающееся тем, что в него введены генератор тактовых импульсов, блок памяти, коммутатор, блок усилителей мощности, блок акустических раздражителей и блок изменения громкости звучания, выход которого соединен с входом блока акустических раздражителей, входы которого соединены с выходами блока усилителей мощности,...
Бортовий стенд для дослідження функцій вестибулярного аналізатора в невагомості
Номер патенту: 6221
Опубліковано: 29.12.1994
Автори: Карімов Рустам Шамілієвич, Бакай Едуард Аполінарієвич, Рікберг Анатолій Борухович, Новіков Валерій Костянтинович, Гурик Володимир Васильович
Мітки: функцій, вестибулярного, аналізатора, дослідження, невагомості, бортовий, стенд
Формула / Реферат:
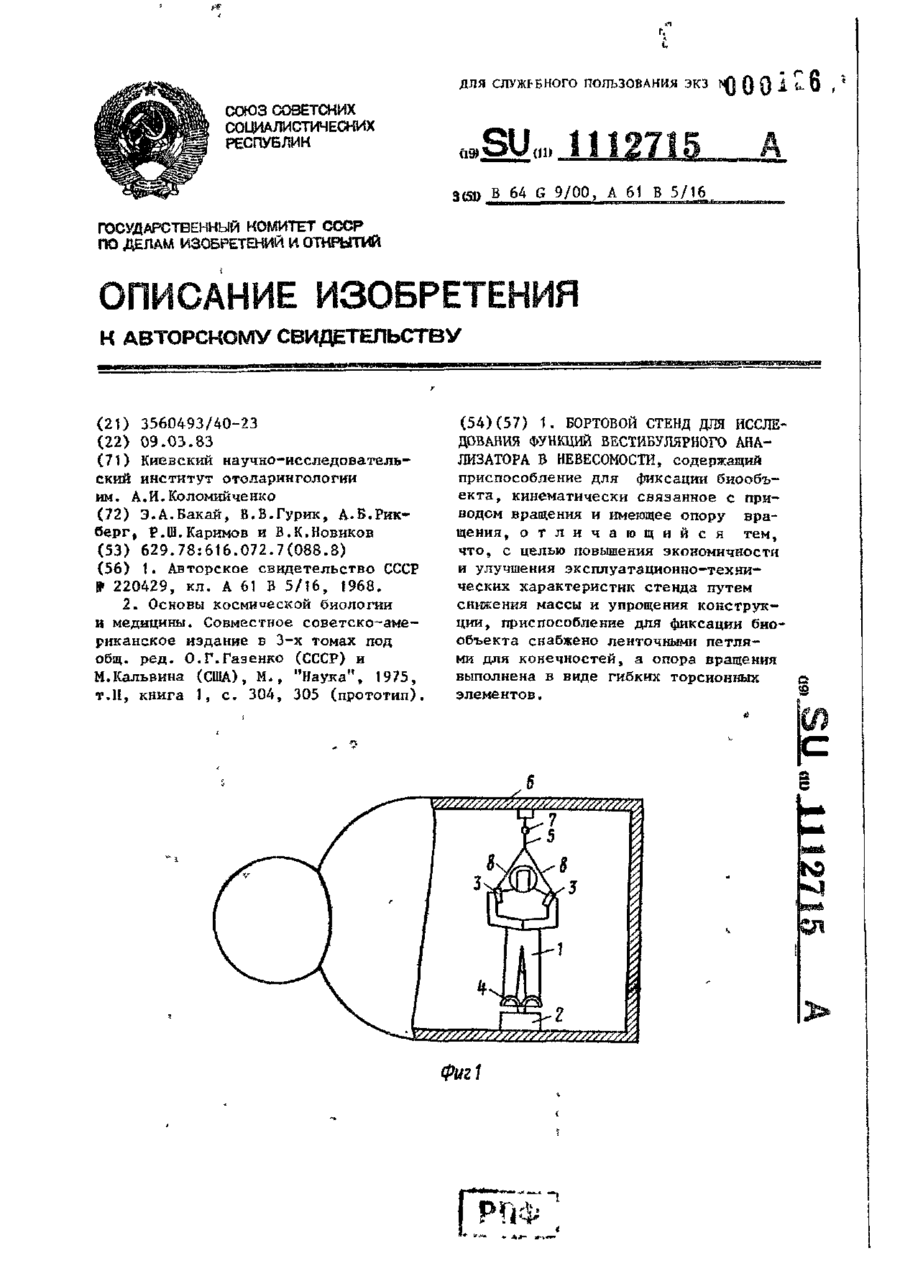
1. Бортовой стенд для исследования функций вестибулярного анализатора в невесомости, содержащий приспособление для фиксации биообъекта, кинематически связанное с приводом вращения и имеющее опору вращения, отличающийся тем, что, с целью повышения экономичности и улучшения эксплуатационно-технических характеристик стенда путем снижения массы и упрощения конструкции, приспособление для фиксации биообъекта снабжено ленточными петлями для...
Експериментальна модель дуоденогастрального рефлюкса
Номер патенту: 20815
Опубліковано: 07.10.1997
Автори: Костюк Григорій Якович, Сливка Оксана Яківна, Сливка Валерій Павлович, Довгань Ігор Петрович, Жученко Сергій Павлович, Вовк Михайло Михайлович, Півторак Володимир Ізяславович, Конопліцький Віктор Сергійович
МПК: G09B 23/28, A61B 17/3209
Мітки: рефлюкса, модель, експериментальна, дуоденогастрального
Формула / Реферат:
1. Спосіб експериментальної моделі дуоденогастрального рефлюкса. який відрізняється тим, що виконують пілороміотомію, яка призводить до порушення арефлюксної функції сфінктера воротаря.2. Спосіб за п. 1, який відрізняється тим, що пілороміотомію виконують по передній І задній поверхні сфінктера воротаря.
Спосіб визначення локального коефіцієнту тепловіддачі
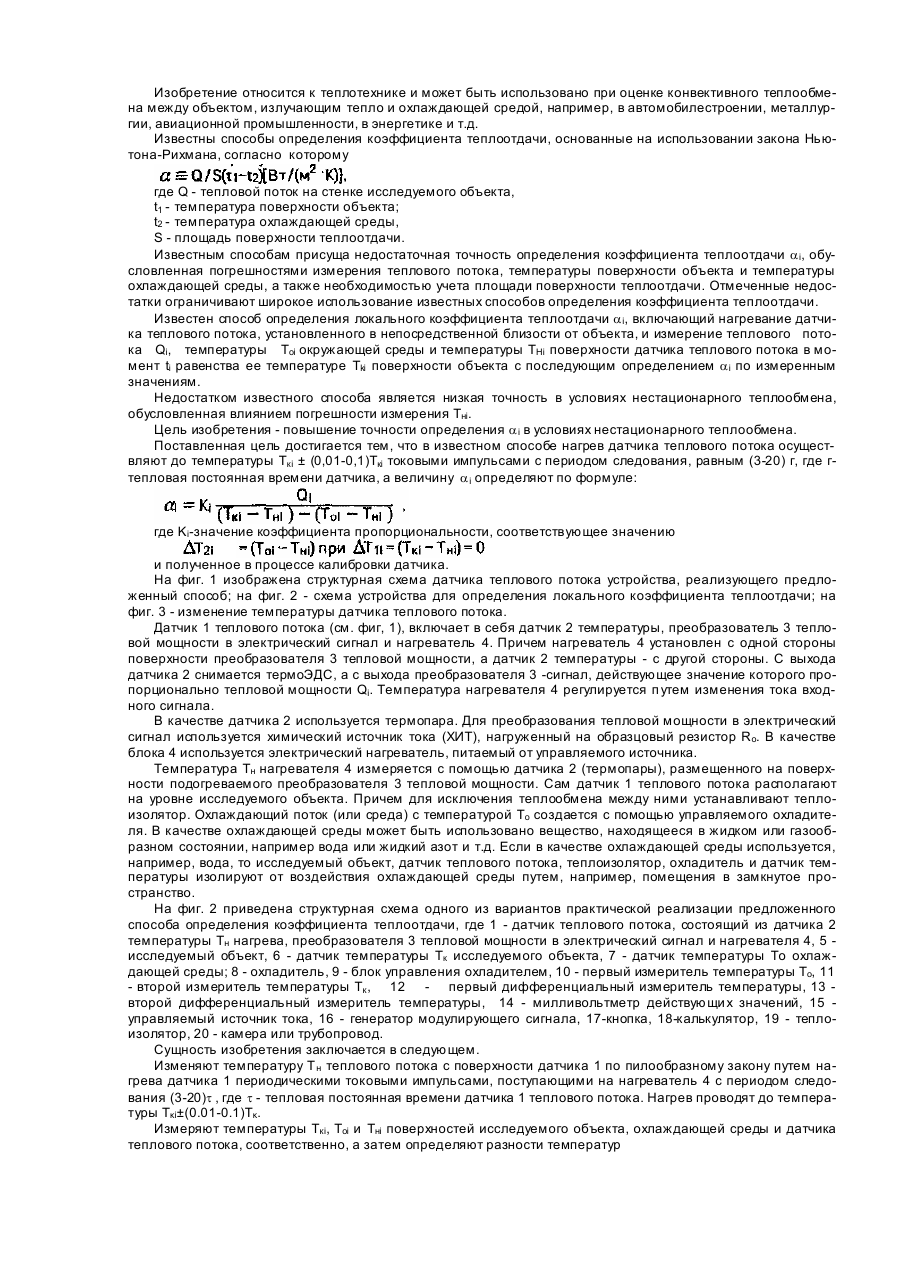
Номер патенту: 18727
Опубліковано: 25.12.1997
Автори: Сіренко Микола Васильович, Кондратов Владислав Тимофійович
МПК: G01K 17/00
Мітки: спосіб, коефіцієнту, тепловіддачі, локального, визначення
Формула / Реферат:
Способ определения локального коэффициента теплоотдачи, включающий нагревание датчика теплового потока, установленного в непосредственной близости от объекта, и измерение теплового потока Qi, температуры Тоi окружающей среды и температуры ТНi поверхности датчика теплового потока в момент ti равенства ее температуры Ткі поверхности объекта, отличающийся тем, что нагрев датчика теплового потока осуществляют до температуры Ткі ±(0,01-0,1) Ткі...
Попередній патент: Спосіб періодичного перетворення енергії та пристрій енергосистеми для його здійснення “мал”
Наступний патент: Спосіб оцінки функціонального стану організму осіб операторських видів праці
Випадковий патент: Спосіб і пристрій для повірки лічильників води