Спосіб стабілізації руху тіла при індукційному прискоренні
Номер патенту: 36202
Опубліковано: 10.10.2008
Автори: Машталір Вадим Віталійович, Чемерис Володимир Терентійович
Формула / Реферат
1. Спосіб стабілізації руху тіла при індукційному прискоренні, при якому попередньо формують розгінну систему, що містить імпульсні соленоїди, зовнішні стержні жорсткості та внутрішні напрямні елементи, розміщують внутрішні напрямні елементи в отворах соленоїдів, підготовляють тіло прискорення, яке містить металевий корпус, здійснюють заходи щодо проведення пострілу шляхом подачі імпульсних струмів від системи живлення на соленоїди та створення при цьому електромагнітного поля імпульсних соленоїдів і забезпечують при пострілі рух тіла прискорення по каналу розгінної системи з прискоренням за рахунок взаємодії електромагнітного поля кожного соленоїда з металічним корпусом тіла прискорення, який відрізняється тим, що розгінну систему поділяють на N секцій, взаємне розташування секцій фіксують за допомогою дистанційних діелектричних вставок, напрямні елементи виготовляють у вигляді окремих рейок, спрямованих вздовж напряму руху тіла, а у боковій поверхні тіла прискорення виготовляють пази для напрямних елементів розгінної системи, здійснюють ромбоподібну форму намотування проводу соленоїда навколо каналу розгінної системи в кожній окремій секції, що забезпечує зменшення відстані між тілом прискорення та внутрішніми провідниками соленоїдів і збільшує інтенсивність силової взаємодії електромагнітного поля соленоїдів з металічним корпусом тіла прискорення, калібрування відстаней між напрямними елементами (рейками) здійснюють за допомогою регульованих з'єднань між цими елементами та дистанційними діелектричними вставками, при підготовці пострілу забезпечують заряджання тіла в розгінну систему у певній початковій позиції із збігом напрямних елементів розгінної системи з пазами в боковій поверхні тіла прискорення, а стабілізацію руху тіла прискорення при пострілі забезпечують за допомогою ковзання пазів, які розташовані на боковій поверхні тіла прискорення, по напрямних елементах розгінної системи та попереднім калібруванням відстаней між напрямними елементами.
2. Спосіб за п. 1, який відрізняється тим, що розгінну систему формують не менше, ніж з двох секцій, дистанційні діелектричні вставки між секціями використовують для кріплення напрямних елементів, що забезпечують стабілізацію руху тіла, що прискорюється, та для розміщення сенсорів для стеження за рухом тіла прискорення.
3. Спосіб за п. 1, який відрізняється тим, що конструктивна цілісність розгінної системи забезпечується стягуванням її секцій між кінцевими фланцями за допомогою стержнів жорсткості.
Текст
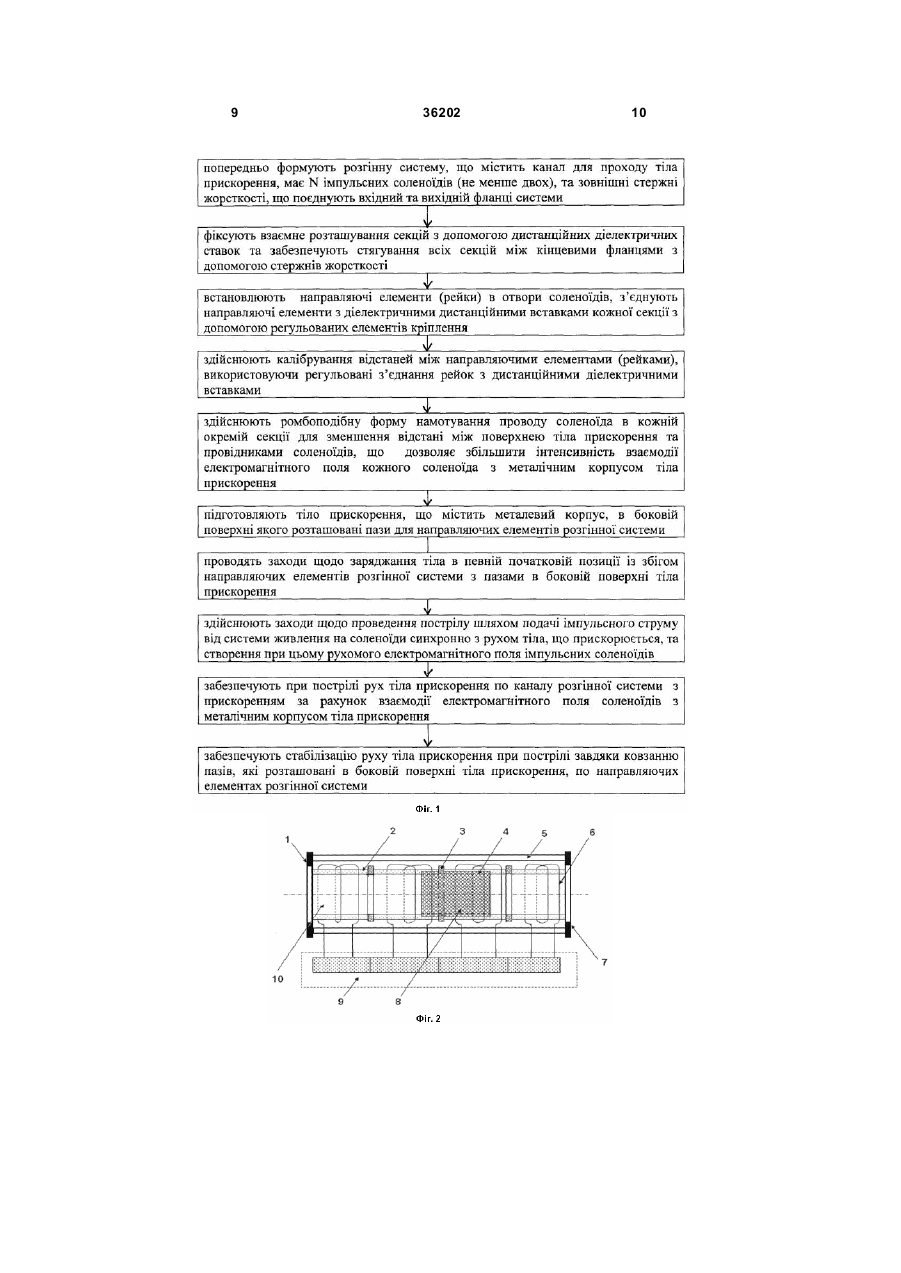
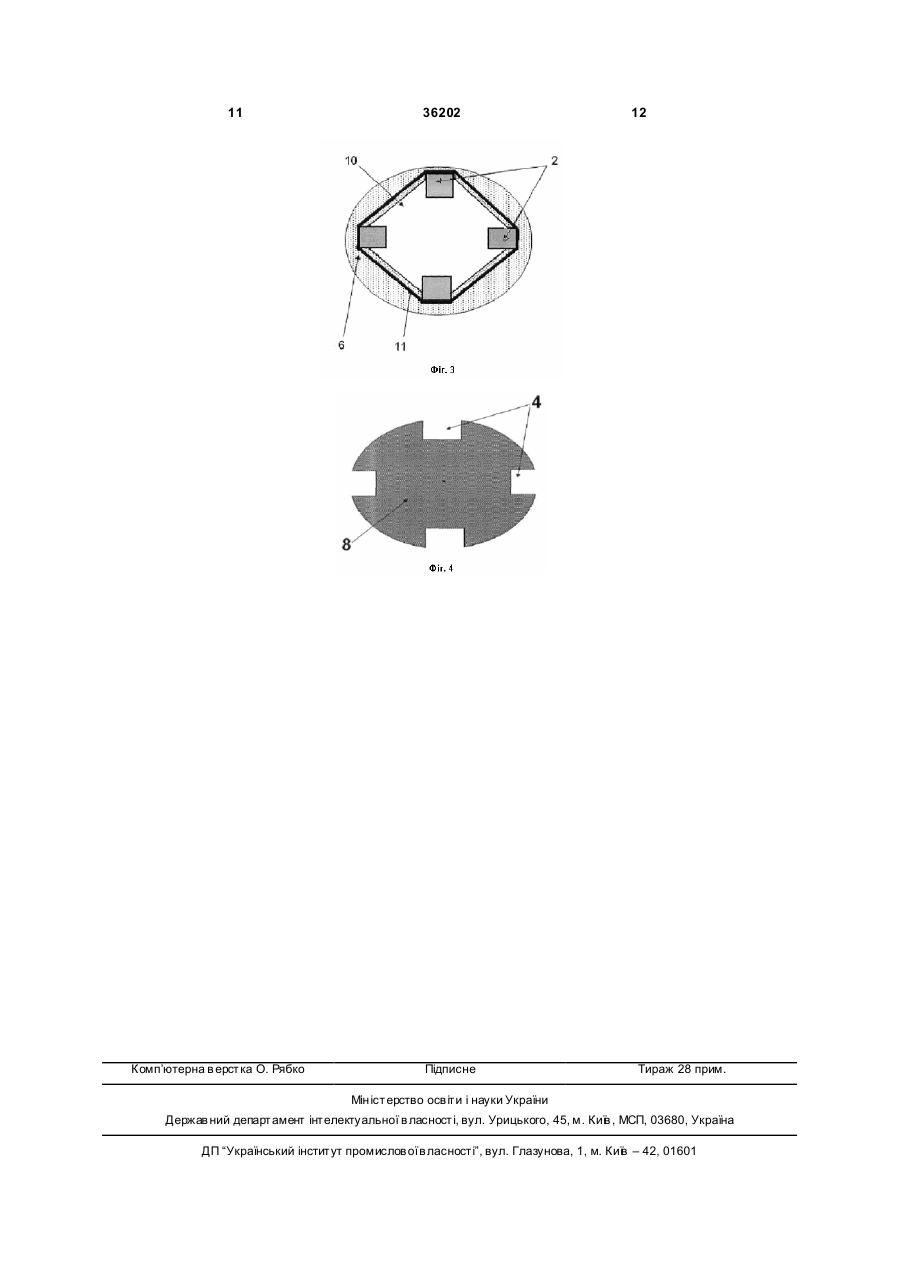
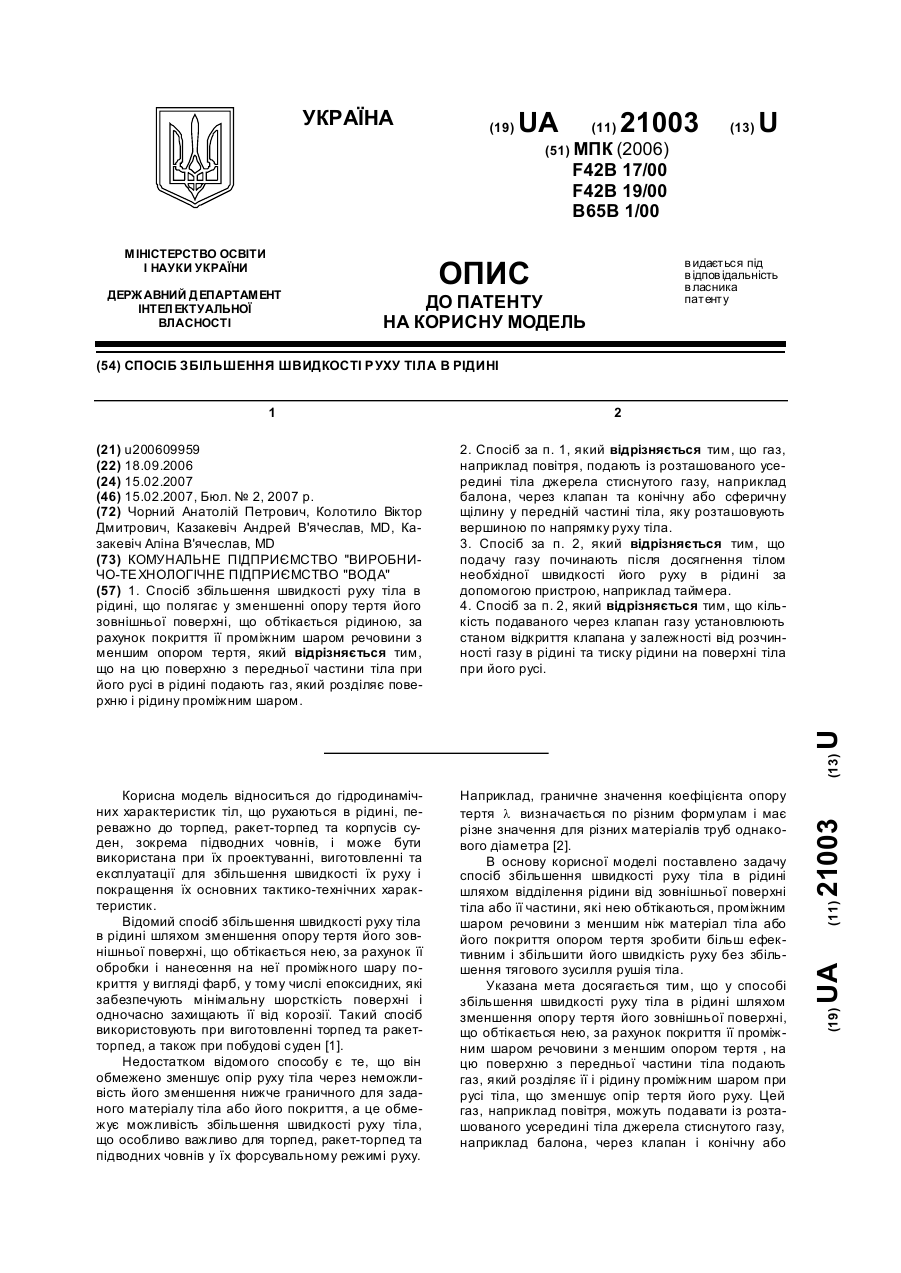
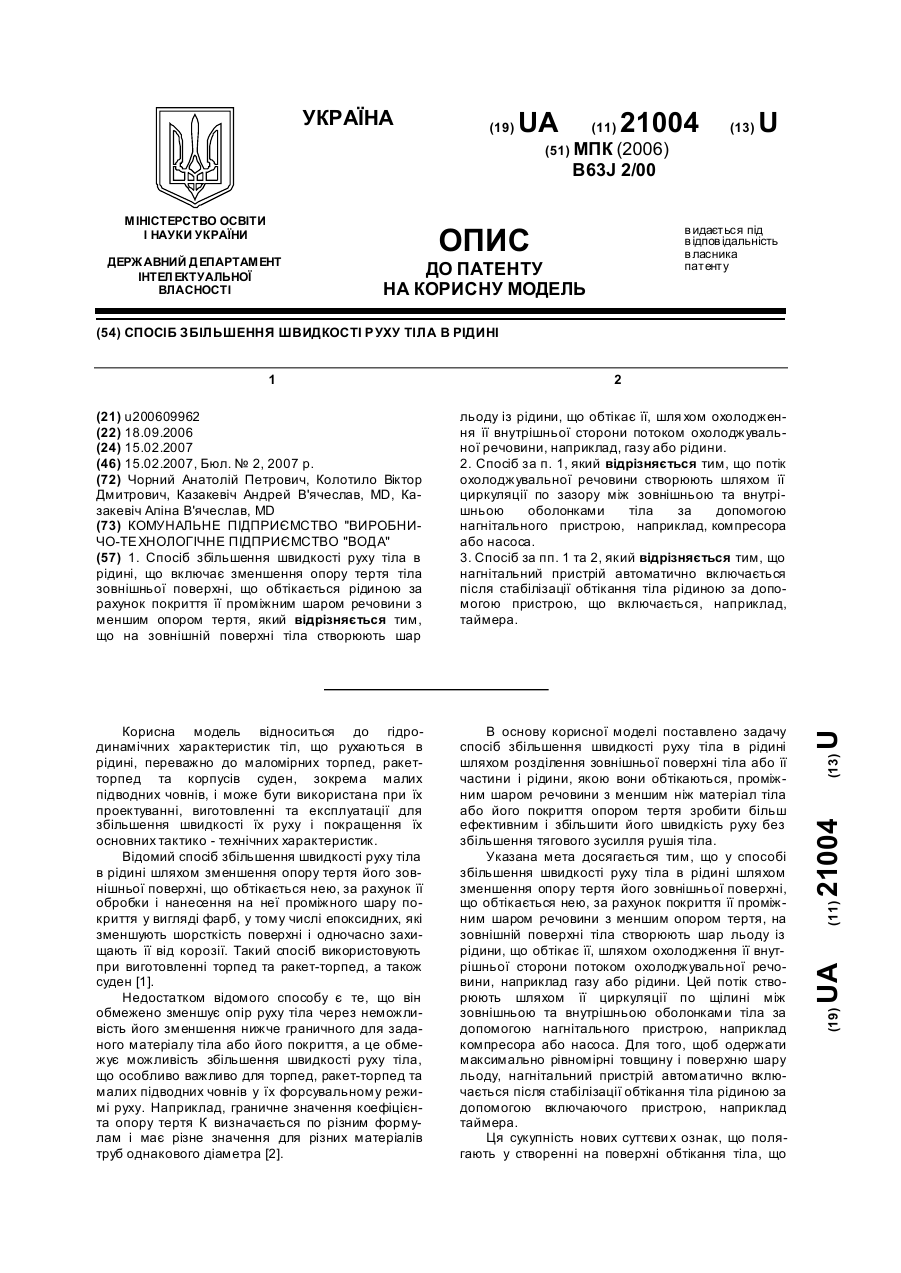
1. Спосіб стабілізації руху тіла при індукційному прискоренні, при якому попередньо формують розгінну систему, що містить імпульсні соленоїди, зовнішні стержні жорсткості та внутрішні напрямні елементи, розміщують внутрішні напрямні елементи в отворах соленоїдів, підготовляють тіло прискорення, яке містить металевий корпус, здійснюють заходи щодо проведення пострілу шляхом подачі імпульсних стр умів від системи живлення на соленоїди та створення при цьому електромагнітного поля імпульсних соленоїдів і забезпечують при пострілі рух тіла прискорення по каналу розгінної системи з прискоренням за рахунок взаємодії електромагнітного поля кожного соленоїда з металічним корпусом тіла прискорення, який відрізняється тим, що розгінну систему поділяють на N секцій, взаємне розташування секцій фіксують за допомогою дистанційних діелектричних вставок, напрямні елементи виготовляють у вигляді окремих рейок, спрямованих вздовж напряму руху тіла, а у боковій поверхні тіла прискорення виготовляють пази для напрямних елементів розгінної системи, здійснюють ромбоподібну форму намо U 2 (19) 1 3 36202 розмірів (перш за все, довжини) направляючої системи. До недоліків відноситься й те, що даний спосіб прискорення потребує значних енергетичних затрат. Найбільш близьким технічним рішенням, як по суті так і за задачами, що вирішуються, є технічне рішення, в якому здійснюється спосіб стабілізації руху тіла при індукційному прискоренні, при якому попередньо формують розгінну (ствольну) систему, що містить імпульсні соленоїди для силової дії на рух тіла, що прискорюється, та канал для проходу тіла прискорення у вигляді суцільної труби (стволу), підготовляють тіло прискорення таким чином, що воно містить металевий корпус, здатний проводити електричні струми, індуковані магнітним полем імпульсних соленоїдів, проводять заходи щодо заряджання тіла прискорення у ствольну систему в певній позиції та здійснюють заходи щодо проведення пострілу шляхом подачі імпульсного струму від системи живлення на соленоїди та створення при цьому електромагнітного поля зазначених соленоїдів і забезпечують при пострілі рух тіла прискорення по каналу (стволу) розгінної системи з прискоренням за рахунок взаємодії електромагнітного поля соленоїда з металічним корпусом тіла прискорення [2]. Недоліком способу стабілізації руху тіла при індукційному прискоренні є необхідність синхронізації подачі напруги на пристрої, що виробляють електромагнітне поле (тобто імпульсні соленоїди), з поступальним рухом тіла прискорення. Ця обставина досліджувалася в роботі [3], де викладені результати розробки потужного індукційного прискорювача (із кінцевою швидкістю тіла прискорення 2500м/с) і показано, що навіть незначна нестабільність у подачі напруги та струм у в імпульсні соленоїди істотно знижує енергетичну ефективність процесу прискорення. До недоліків прототипу відноситься й те, що направляюча система у вигляді суцільної труби (стволу) має негативний вплив на енергетичні показники процесу прискорення тіла. Трубу не можна виготовляти з міцних металевих сплавів через те, що металева стінка стволу екранує тіло, що має прискорюватися, від дії електромагнітного поля, через що значно зменшується сила, що прискорює тіло. Якщо ж виготовляти направляючу тр убу з неметалевих матеріалів, то для забезпечення необхідної міцності стволу великої довжини товщина стінок труби має бути достатньо великою, через що збільшується різниця між внутрішнім діаметром імпульсних соленоїдів та зовнішнім діаметром тіла, що прискорюється. Збільшення цієї різниці діаметрів має наслідком зменшення електромагнітного зв’язку тіла, що прискорюється, з імпульсними соленоїдами та зниження енергетичних показників процесу прискорення. В пошуках е фективних методів стабілізації руху тіла циліндричної форми під час його прискорення імпульсним магнітним полем соленоїда досліджувався вільний рух тіла у вн утрішній порожнині імпульсних соленоїдів взагалі без усякої направляючої системи [4, 5]. Було виявлено, що навіть незначні відхилення від осесиметричного розташування тіла у внутрішній порожнині солено 4 їда породжують бокові складові електромагнітної сили, внаслідок чого одночасно з поступальним рухом вздовж осі прискорювача тіло здійснює хаотичні відхилення від головного напрямку руху і може пошкодити внутрішню ізоляцію та провідники соленоїда, торкаючись їх на великій швидкості. Для компенсації цих бокових зусиль, що діють на тіло прискорення, в роботах [4, 5] було запропоновано застосовувати додаткові стабілізуючі соленоїди, але таке рішення збільшує складність системи і кількість елементів, що створюють електромагнітне поле. В основу корисної моделі покладено задачу забезпечити стабілізацію руху тіла прискорення завдяки ковзанню пазів, які розташовані в його боковій поверхні, по направляючих елементах розгінної системи, з метою просування тіла по каналу розгінної системи з максимальним зростанням його швидкості. Суть корисної моделі в способі стабілізації руху тіла при індукційному прискоренні, при якому попередньо формують розгінну систему, що містить імпульсні соленоїди, зовнішні стержні жорсткості та внутрішні направляючі елементи, розміщують вн утрішні направляючі елементи в отворах соленоїдів, підготовляють тіло прискорення, яке містить металевий корпус, здійснюють заходи щодо проведення пострілу шляхом подачі імпульсних струмів від системи живлення на соленоїди та створення при цьому електромагнітного поля імпульсних соленоїдів і забезпечують при пострілі рух тіла прискорення по каналу розгінної системи з прискоренням за рахунок взаємодії електромагнітного поля кожного соленоїда з металічним корпусом тіла прискорення, полягає в тому, що розгінну систему поділяють на N секцій, взаємне розташування секцій фіксують з допомогою дистанційних діелектричних вставок, направляючі елементи виготовляють у вигляді окремих рейок, спрямованих вздовж напряму руху тіла, а у боковій поверхні тіла прискорення виготовляють пази для направляючих елементів розгінної системи, здійснюють ромбоподібну форму намотування проводу соленоїда навколо каналу розгінної системи в кожній окремій секції, що забезпечує зменшення відстані між тілом прискорення та внутрішніми провідниками соленоїдів і збільшує інтенсивність силової взаємодії електромагнітного поля соленоїдів з металічним корпусом тіла прискорення, калібрування відстаней між направляючими елементами (рейками) здійснюють з допомогою регульованих з’єднань між цими елементами та дистанційними діелектричними вставками, при підготовці пострілу забезпечують заряджання тіла в розгінну систему у певній початковій позиції із збігом направляючих елементів розгінної системи з пазами в боковій поверхні тіла прискорення, а стабілізацію руху тіла прискорення при пострілі забезпечують за допомогою ковзання пазів, які розташовані на боковій поверхні тіла прискорення, по направляючих елементах розгінної системи та попереднім калібруванням відстаней між направляючими елементами. Суть корисної моделі полягає і в тому, що розгінну систему формують не менше, ніж з двох секцій, дистанційні діелектричні вставки між 5 36202 секціями використовують для кріплення направляючих елементів, що забезпечують стабілізацію руху тіла, що прискорюється, та для розміщення сенсорів для стеження за рухом тіла прискорення. А також і в тому, що конструктивна цілісність розгінної системи забезпечується стягуванням її секцій між кінцевими фланцями з допомогою стержнів жорсткості. Порівняльний аналіз технічного рішення із прототипом, дозволяє зробити висновок, що спосіб стабілізації руху тіла при індукційному прискоренні, який заявляється, відрізняється тим, розгінну систему поділяють на N секцій, взаємне розташування секцій фіксують з допомогою дистанційних діелектричних вставок, направляючі елементи виготовляють у вигляді окремих рейок, спрямованих вздовж напряму руху тіла, а у боковій поверхні тіла прискорення виготовляють пази для направляючих елементів розгінної системи, здійснюють ромбоподібну форму намотування проводу соленоїда навколо каналу розгінної системи в кожній окремій секції, що забезпечує зменшення відстані між тілом прискорення та внутрішніми провідниками соленоїдів і збільшує інтенсивність силової взаємодії електромагнітного поля соленоїдів з металічним корпусом тіла прискорення, калібрування відстаней між направляючими елементами (рейками) здійснюють з допомогою регульованих з’єднань між цими елементами та дистанційними діелектричними вставками, при підготовці пострілу забезпечують заряджання тіла в розгінну систему у певній початковій позиції із збігом направляючих елементів розгінної системи з пазами в боковій поверхні тіла прискорення, а стабілізацію руху тіла прискорення при пострілі забезпечують за допомогою ковзання пазів, які розташовані на боковій поверхні тіла прискорення, по направляючих елементах розгінної системи та попереднім калібруванням відстаней між направляючими елементами., при цьому розгінну систему формують не менше, ніж з двох секцій, дистанційні діелектричні вставки між секціями використовують для кріплення направляючих елементів, що забезпечують стабілізацію руху тіла, що прискорюється, та для розміщення сенсорів для стеження за рухом тіла прискорення, а також конструктивна цілісність розгінної системи забезпечується стягуванням її секцій між кінцевими фланцями з допомогою стержнів жорсткості. Суть корисної моделі пояснюється за допомогою ілюстрації, де на Фіг.1 представлена блоксхема порядку виконання технологічних операцій, що покладені в основу способу стабілізації руху тіла при індукційному прискоренні, який заявляється. На Фіг.2 показана ілюстрація пристрою індуктивного прискорення для здійснення способу стабілізації руху тіла при індукційному прискоренні. На Фіг.3 показана схема намотування проводу соленоїда навколо каналу системи прискорення в окремій секції, на Фіг.4 показано тіло прискорення в боковому перерізі. Для здійснення способу стабілізації руху тіла при індукційному прискоренні попередньо формують розгінну систему, що має вхідний фланець 1, направляючі елементи (рейки) 2, дистанційні діе 6 лектричні вставки між секціями 3, стержні жорсткості 5, що з’єднують вхідний фланець 1 з вихідним фланцем 7, та імпульсні соленоїди 6. Дистанційні діелектричні вставки 3 після стягування всіх секцій стержнями жорсткості між фланцями 1 та 7 забезпечують необхідну фіксацію взаємного положення секцій і дають можливість здійснювати кріплення направляючих рейок 2 до вставок 3. Це кріплення виконується регульованим для забезпечення можливості калібрування відстаней між направляючими елементами (рейками) 2 і підтримання їхньої жорсткості. В матеріалі дистанційних вставок З розміщуються також сенсори для стеження за рухом тіла прискорення 8. Тіло прискорення 8 має металевий корпус, у боковій поверхні котрого виготовлені пази 4, що охоплюють направляючі елементи 2. Тіло прискорення 8 здатне ковзати пазами 4 по направляючих рейках 2 в каналі 10 розгінної системи (також див. Фіг.4). Для підготовки пострілу тіло 8 заряджають в розгінну систему із збігом пазів 4 з направляючими елементами 2. Канал розгінної системи разом з направляючими елементами (рейками) 2 охоплений імпульсними соленоїдами 6, що мають ромбоподібну форму отвору завдяки технології ромбовидного намотування проводу 11 соленоїда 6 в кожній окремій секції розгінної системи (див. Фіг.3). Для здійснення пострілу забезпечують синхронізовану із рухом тіла 8 подачу імпульсного струму від системи живлення 9 на соленоїди 6, при цьому створюється рухоме електромагнітне поле імпульсних соленоїдів 6, чим забезпечується при пострілі рух тіла прискорення 8 по каналу 10 розгінної системи із зростанням швидкості руху тіла за рахунок взаємодії електромагнітного поля соленоїдів з металічним корпусом тіла (див. Фіг.2). Реалізація способу стабілізації руху тіла при індукційному прискоренні, що заявляється, здійснюється за допомогою пристрою індукційного прискорення, який містить (як варіант конструктивного виконання) (див. Фіг.2) направляючі елементи (рейки) 2, канал для проходу тіла прискорення 10, діелектричні дистанційні вставки 3 між секціями розгінної системи, тіло прискорення 8, в боковій поверхні якого виготовлені пази 4, імпульсні соленоїди 6, та систему живлення 9. Попередньо формують розгінну систему, що містить N секцій імпульсних соленоїдів. Конструктивна цілісність розгінної системи забезпечується стягуванням вхідного фланцю 1 та вихідного фланцю 7 з допомогою стержнів жорсткості 5. Розгінну систему формують не менше, ніж з двох секцій. Діелектричні дистанційні вставки 3 фіксують соленоїди в розгінній системі. Вставки 3 використовуються також для кріплення направляючих елементів (рейок) 2 до вставок 3 з допомогою регульованих елементів кріплення, а також для розміщення сенсорів для стеження за рухом тіла 8. Далі технологічний процес, що покладений в основу способу стабілізації руху тіла при індукційному прискоренні, що заявляється, передбачає встановлення в розгінній системі направляючих елементів (рейок) 2 та соленоїдів 6. В процесі виготовлення соленоїдів 6 здійснюють заходи щодо намотування проводу соленоїда 7 36202 на спеціальну ромбоподібну оправку, чим забезпечується ромбоподібна форма внутрішнього отвору кожного соленоїда. Це дозволяє сформувати в отворах соленоїдів канал для проходу тіла прискорення разом з направляючими елементами (рейками)із збереженням мінімальних відстаней між поверхнею металевого корпусу тіла та внутрішніми поверхнями отворів соленоїдів. Завдяки цьому досягається збільшення інтенсивності силової взаємодії електромагнітного поля соленоїдів з металевим корпусом тіла прискорення (у порівнянні з тим, якою була б ця інтенсивність при круговій формі отворів у соленоїдах). Процес здійснення способу, що заявляється, передбачає також необхідність попередньої технологічної операції (або попередньо - як варіант конструктивного виконання) для підготовки тіла прискорення, яке повинно мати металевий корпус, а в боковій поверхні його повинні бути виготовлені пази для направляючих елементів (рейок) розгінної системи. Наступним етапом технологічного процесу, який покладений в основу способу стабілізації руху тіла при індукційному прискоренні, що заявляється, є проведення заходів щодо заряджання тіла прискорення в розгінну систему із дотриманням певної початкової позиції та збігу пазів на боковій поверхні тіла прискорення з направляючих елементами (рейками) розгінної системи. Після цього здійснюють заходи щодо проведення пострілу шляхом подачі імпульсного струму від системи живлення до імпульсних соленоїдів синхронно із запрограмованим рухом тіла, що прискорюється. Для керування підключенням кожного соленоїда використовується інформація про заплановану діаграму руху тіла прискорення та інформація про фактичний рух тіла від сенсорів, що розміщені на діелектричних дистанційних вставках 3. Ця інформація обробляється керуючим пристроєм, що входить до складу системи живлення 9. В результаті в розгінній системі створюється рухомий фронт імпульсного електромагнітного поля, який в результаті взаємодії з металевим корпусом тіла прискорення забезпечує зростання його швидкості по заданому закону. Головний етап технологічного процесу, що покладений в основу способу стабілізації руху тіла при індукційному прискоренні, що заявляється, це стабілізація руху тіла прискорення при пострілі за допомогою ковзання тіла пазами, які розташовані на його боковій поверхні, по направляючих елементах (рейках) розгінної системи. Безперешкодний рух тіла по направляючих елементах з допомогою пазів забезпечується попереднім калібруванням відстаней між направляючими елементами (рейками) за допомогою регульованих елементів кріплення рейок 2 до діелектричних вставок 3. Реалізація способу стабілізації руху тіла при індукційному прискоренні, що заявляється, за допомогою вищезазначеного пристрою здійснюється таким чином. 8 При подачі струмів від системи живлення 7 на кожен із соленоїдів 6 навколо соленоїду, в якому перебуває в даний момент тіло прискорення 8, створюється магнітне поле. При взаємодії імпульсного магнітного поля соленоїда із металічним корпусом тіла прискорення 8, відбувається виштовхування тіла прискорення 8 із швидкістю, яка відповідає різниці між силою виштовхування тіла 8 магнітним полем соленоїда та силами, що протидіють рухові (сила інерції, сили тертя). Швидкісне ковзання тіла 8 пазами, що розташовані на його боковій поверхні, вздовж направляючих елементів (рейок) 2 розгінної системи гарантує стабілізацію руху тіла 8 у процесі прискорення. Направляючі елементи 2 не є струмонесучими, тому вони позбавлені впливу електроерозії, яка є головною проблемою електроконтактних рейкових прискорювачів (рейкотронів). Підвищення ефективності застосування способу стабілізації руху тіла при індукційному прискоренні, що заявляється, в розгінній системі, яка складається з N секцій, у порівнянні з прототипом досягається за рахунок розміщення направляючих елементів (рейок) безпосередньо в отворах імпульсних соленоїдів, за рахунок часткового заглиблення направляючих елементів (рейок) у пази на поверхні металевого корпусу тіла прискорення, і за рахунок спеціальної ромбоподібної форми отворів в імпульсних соленоїдах. Завдяки такій формі намотування проводу соленоїдів забезпечується максимально можливий електромагнітний зв’язок між кожним з імпульсних соленоїдів та рухомим тілом прискорення, що є необхідною умовою високої енергетичної ефективності розгінного процесу. Крім того, спосіб стабілізації руху тіла при індукційному прискоренні, що заявляється, має властивості, які дозволяють на його основі реалізувати нові зразки кінетичної зброї, а також дозволяє підвищити ефективність застосування електродинамічних прискорювачів. Джерела інформації: 1. Космическое оружие: дилемма безопасности// Под ред. Е.П. Велихова, Р.З. Сагдеева, А.А. Кокошина. -М.: Мир, 1986. Раздел 1.3 - Кинетическое оружие, cтop.58 – аналог. 2. W.F. Salisbury. Acceleration amplifier// Патент США №2,870,675.// Patented Jan. 27, 1959, Сl. 89-1, 10р. - прототип. 3. Ronald J. Kaye. Operational requirements and issues for coilgun electromagnetic launchers. - IEEE Transactions on Magnetics, vol.41, No.l, January 2005, pp.194-199. 4. V.T. Chemerys, Yu.N. Vaskovsky, L.N. Dynnik. Mathematical simulation of projectile free motion in coilgun without mechanical leading elements. - EML97// Proceedings of 6th European Symposium on Electromagnetic Launch Technology, The Hague, 2528 May, 1997, pp.335-342. 5. Ю.Н. Васьковский, Л.Н. Дынник. Движение электропроводного осесимметричного тела в импульсном магнитном поле соленоида. - Техническая электродинамика, 1991, №2, с.22-28, 57. 9 36202 10 11 Комп’ютерна в ерстка О. Рябко 36202 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilization of motion of body at induction acceleration
Автори англійськоюChemerys Volodymyr Terentiiovych, Mashtalir Vadym Vitaliiovych
Назва патенту російськоюСпособ стабилизации движения тела при индукционном ускорении
Автори російськоюЧемерис Владимир Терентьевич, Машталир Вадим Витальевич
МПК / Мітки
МПК: F41F 1/00, F41A 21/00
Мітки: індукційному, руху, спосіб, тіла, стабілізації, прискоренні
Код посилання
<a href="https://ua.patents.su/6-36202-sposib-stabilizaci-rukhu-tila-pri-indukcijjnomu-priskorenni.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації руху тіла при індукційному прискоренні</a>
Спосіб збільшення швидкості руху тіла в рідині
Номер патенту: 21003
Опубліковано: 15.02.2007
Автори: Колотило Віктор Дмитрович, Казакевіч Андрей В'ячеслав, Казакевіч Аліна Вячеслав, Чорний Анатолій Петрович
МПК: F42B 19/00, B65B 1/00, F42B 17/00
Мітки: руху, спосіб, тіла, збільшення, рідини, швидкості
Формула / Реферат:
1. Спосіб збільшення швидкості руху тіла в рідині, що полягає у зменшенні опору тертя його зовнішньої поверхні, що обтікається рідиною, за рахунок покриття її проміжним шаром речовини з меншим опором тертя, який відрізняється тим, що на цю поверхню з передньої частини тіла при його русі в рідині подають газ, який розділяє поверхню і рідину проміжним шаром.2. Спосіб за п. 1, який відрізняється тим, що газ, наприклад повітря, подають із...
Спосіб збільшення швидкості руху тіла в рідині
Номер патенту: 21004
Опубліковано: 15.02.2007
Автори: Колотило Віктор Дмитрович, Казакевіч Аліна Вячеслав, Казакевіч Андрей В'ячеслав, Чорний Анатолій Петрович
МПК: B63J 2/00
Мітки: швидкості, рідини, збільшення, тіла, спосіб, руху
Формула / Реферат:
1. Спосіб збільшення швидкості руху тіла в рідині, що включає зменшення опору тертя тіла зовнішньої поверхні, що обтікається рідиною за рахунок покриття її проміжним шаром речовини з меншим опором тертя, який відрізняється тим, що на зовнішній поверхні тіла створюють шар льоду із рідини, що обтікає її, шляхом охолодження її внутрішньої сторони потоком охолоджувальної речовини, наприклад, газу або рідини.2. Спосіб за п. 1, який...
Спосіб збільшення швидкості руху тіла в рідині
Номер патенту: 21808
Опубліковано: 10.04.2007
Автори: Чорний Анатолій Петрович, Казакевіч Аліна Вячеслав, Казакевіч Андрєй Вячеслав
МПК: F42B 19/00, F42B 17/00
Мітки: спосіб, збільшення, швидкості, тіла, рідини, руху
Формула / Реферат:
Спосіб збільшення швидкості руху тіла в рідині шляхом зменшення опору тертя його зовнішньої поверхні, що обтікається нею, який відрізняється тим, що його зовнішню поверхню покривають речовиною, наприклад гідрокарбонатною (Ca(HCO3)2, Mg(HCO3)2 і т.п.), яка при контакті з рідиною, в якій тіло рухається, повільно розчиняючись в ній, виділяє газ.
Спосіб термічної стабілізації газоподібного робочого тіла в процесі зміни його параметрів при контурній деформації (зміні об’єму)
Номер патенту: 47484
Опубліковано: 15.07.2002
Автор: Дологлонян Андрій Вартазарович
МПК: F04B 31/00, F01P 9/00, F02G 5/00, F01B 31/00, F02G 1/00
Мітки: газоподібного, контурній, параметрів, спосіб, тіла, робочого, термічної, стабілізації, процесі, об'єму, деформації, зміни
Формула / Реферат:
Спосіб термічної стабілізації газоподібного робочого тіла у процесі зміни його параметрів при контурній деформації (зміні об'єму) шляхом відводу (підведення) теплоти у процесі зміни об'єму, який відрізняється тим, що робоче тіло в процесі контурної деформації вилучають з робочого об'єму, пропускають через контур термічної стабілізації (систему охолодження або підігріву) і повертають знову до робочого об'єму.
Пристрій для зниження опору руху транспортного засобу або обтікання тіла середовищем
Номер патенту: 13737
Опубліковано: 17.04.2006
Автори: Казакевіч Аліна Вячеслав, Петросов Валерій Альбертович, Хільський В'ячеслав Петрович, Чорний Анатолій Петрович, Казакевич Андрій Вячеслав
МПК: B63B 1/40, B61D 17/00
Мітки: середовищем, опору, зниження, обтікання, пристрій, тіла, руху, транспортного, засобу
Формула / Реферат:
1. Пристрій для зниження опору руху транспортного засобу або обтікання тіла середовищем, що містить елемент конструкції обтічної частини його корпусу, який відрізняється тим, що пристрій виконують у вигляді труб або отворів, якими сполучають зону середовища перед корпусом із зоною середовища зниженого тиску за корпусом.2. Пристрій за п. 1, який відрізняється тим, що у передній трубі, якою сполучають зону середовища перед корпусом...
Попередній патент: Препарат німексид-гель для місцевого застосування
Наступний патент: Спосіб лікування діабетичної ретинопатії
Випадковий патент: Спосіб отримання модифікованого епоксикомпозитного покриття