Вібродатчик в`язкості
Номер патенту: 36818
Опубліковано: 10.11.2008
Автори: Зайківський Олександр Болеславович, Швець Юрій Володимирович, Воробйов Віталій Іванович, Єршова Емма Олександрівна
Формула / Реферат
Вібродатчик в'язкості, який містить робочий орган, занурений у досліджуване середовище, корпус та електромагнітну систему збудження коливань робочого органа, який відрізняється тим, що електромагнітна система збудження коливань додатково обладнана частотоміром та джерелом живлення, робочий орган зазначеної системи виконаний у вигляді стержня із закріпленими на його нижньому кінці сильфоном, а у середній частині - якорем, виконаним у вигляді пластини з феромагнітними накладками, електромагнітна система збудження коливань виконана такою, що містить не менше одного блока електровібраторів, виконаних у вигляді електромагнітів, розміщених симетрично площині зазначеної пластини, постійний магніт, закріплений на пластині, індукційні датчики, розташовані симетрично зазначеному магніту, пружини, встановлені симетрично площині пластини і виконані з однаковими характеристиками, підсилювач низької частоти та частотомір, корпус додатково обладнаний віконцем, кришкою та верхньою і нижньою проміжними вставками, при цьому кришка та верхня проміжна вставка виконані з центральними отворами з розташованими у них підшипниками ковзання для проходу стержня, зазначений стержень виконаний порожнистим і обладнаний у нижній частині опорною площадкою для закріплення верхньої частини сильфона, а у верхній - пробкою, у нижній проміжній вставці виконані отвори та площадка для закріплення нижньої частини згаданого сильфона, електромагніти виконані закріпленими на кришці та верхній проміжній вставці симетрично один відносно одного, пружини виконані розташованими симетрично між собою і між пластиною, кришкою та верхньою проміжною вставкою, виходи джерела живлення виконано з'єднаними з входами частотоміра та підсилювача низької частоти, а виходи індукційних датчиків виконані зв'язаними з входами підсилювача низької частоти, а виходи останнього - з входами електромагнітів та частотоміра.
Текст
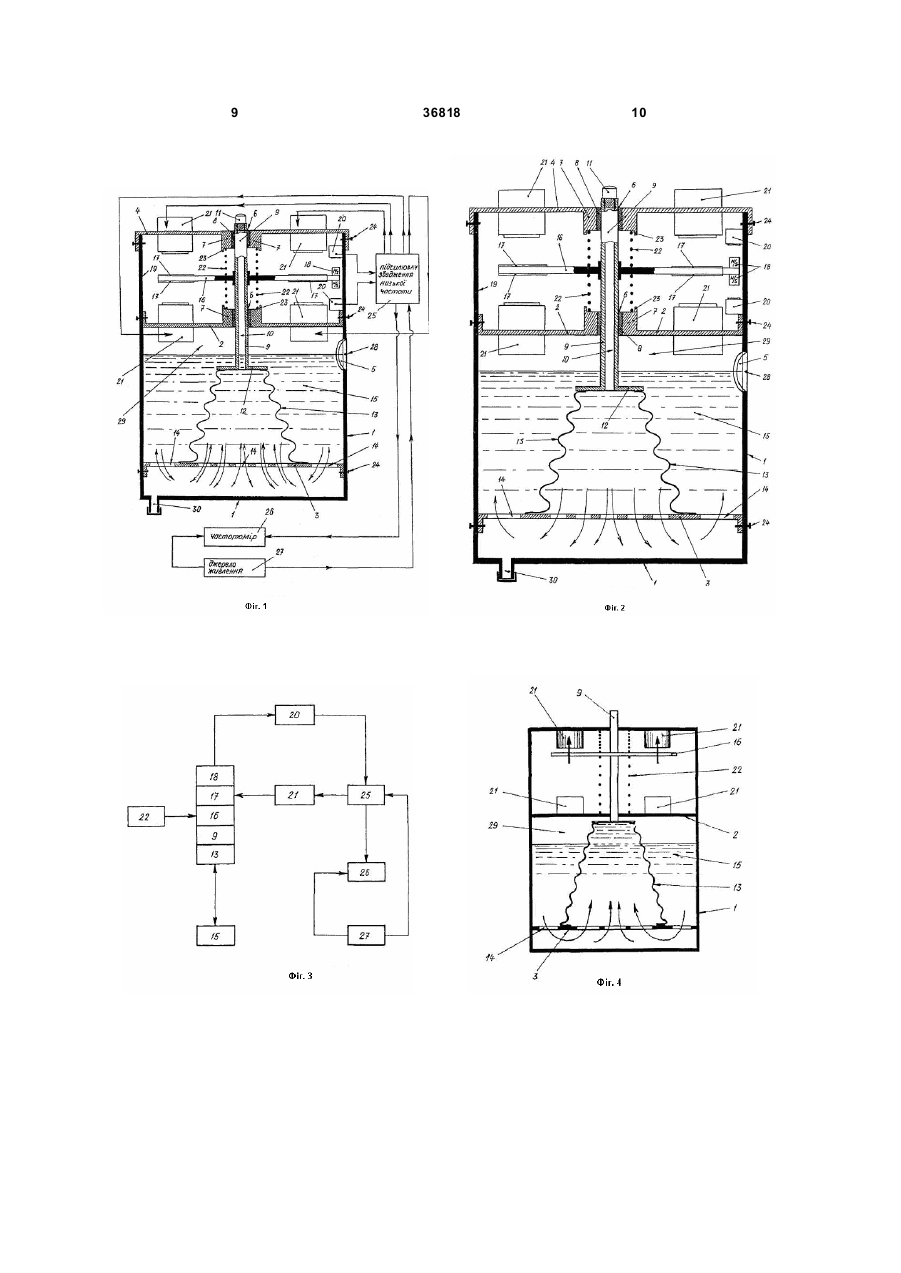
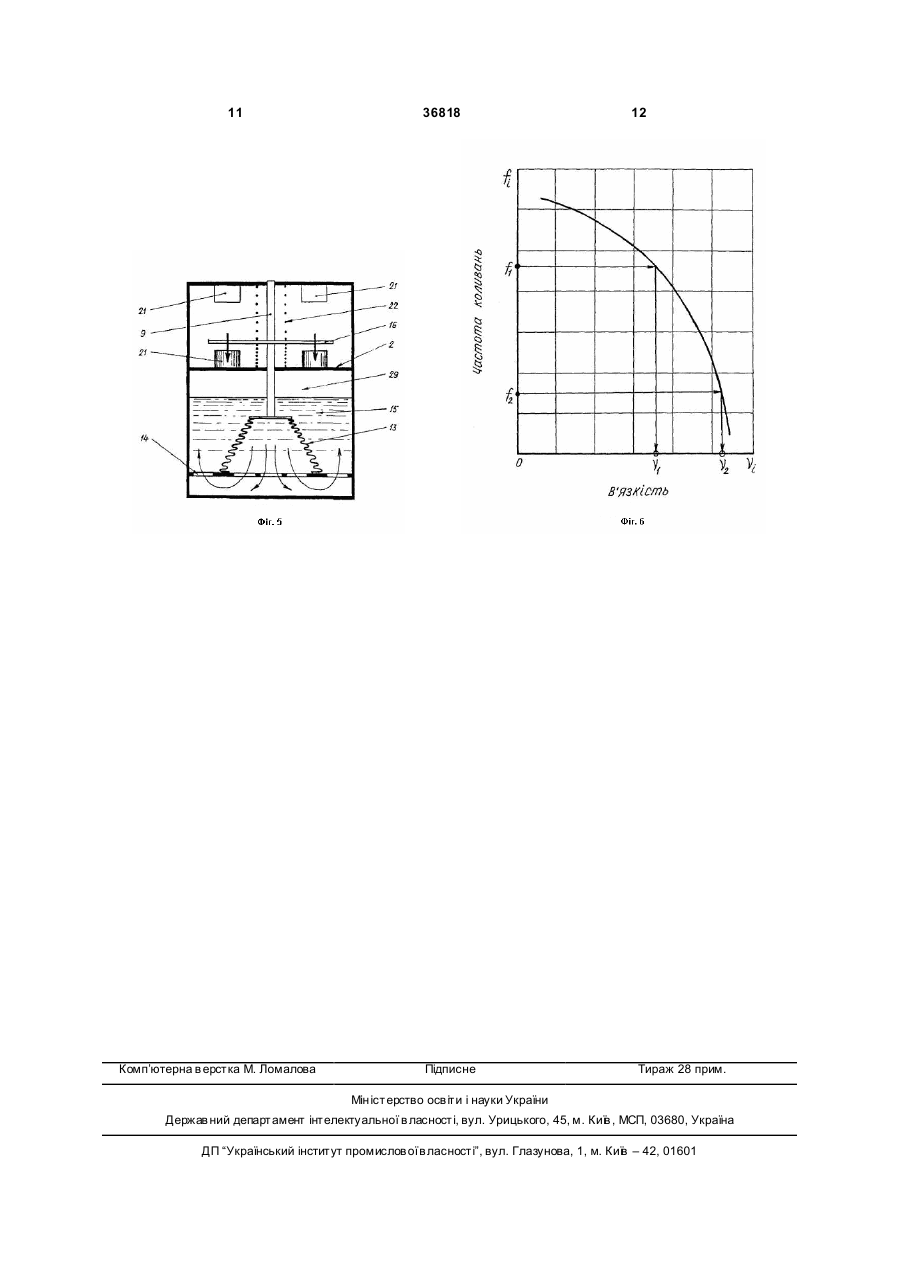
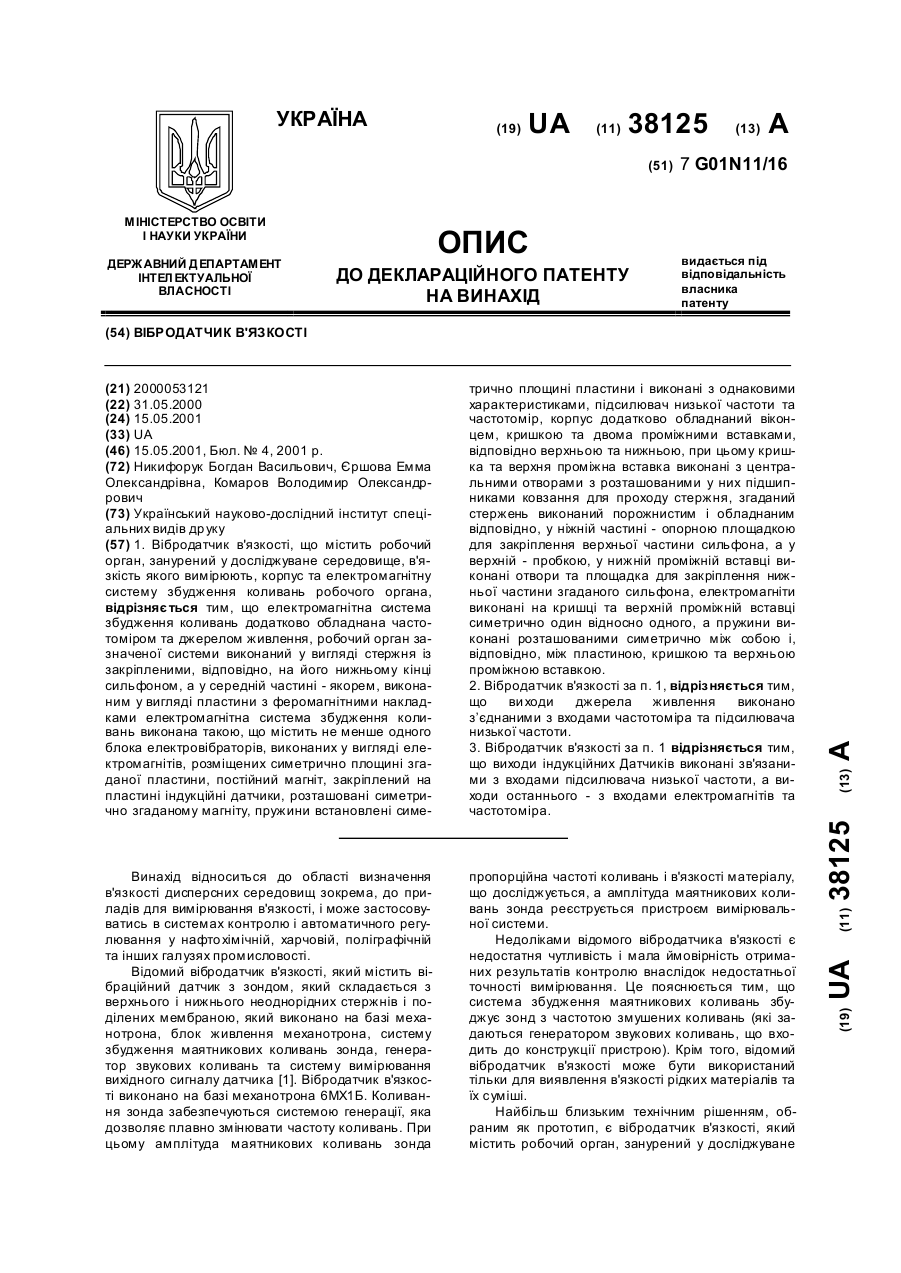
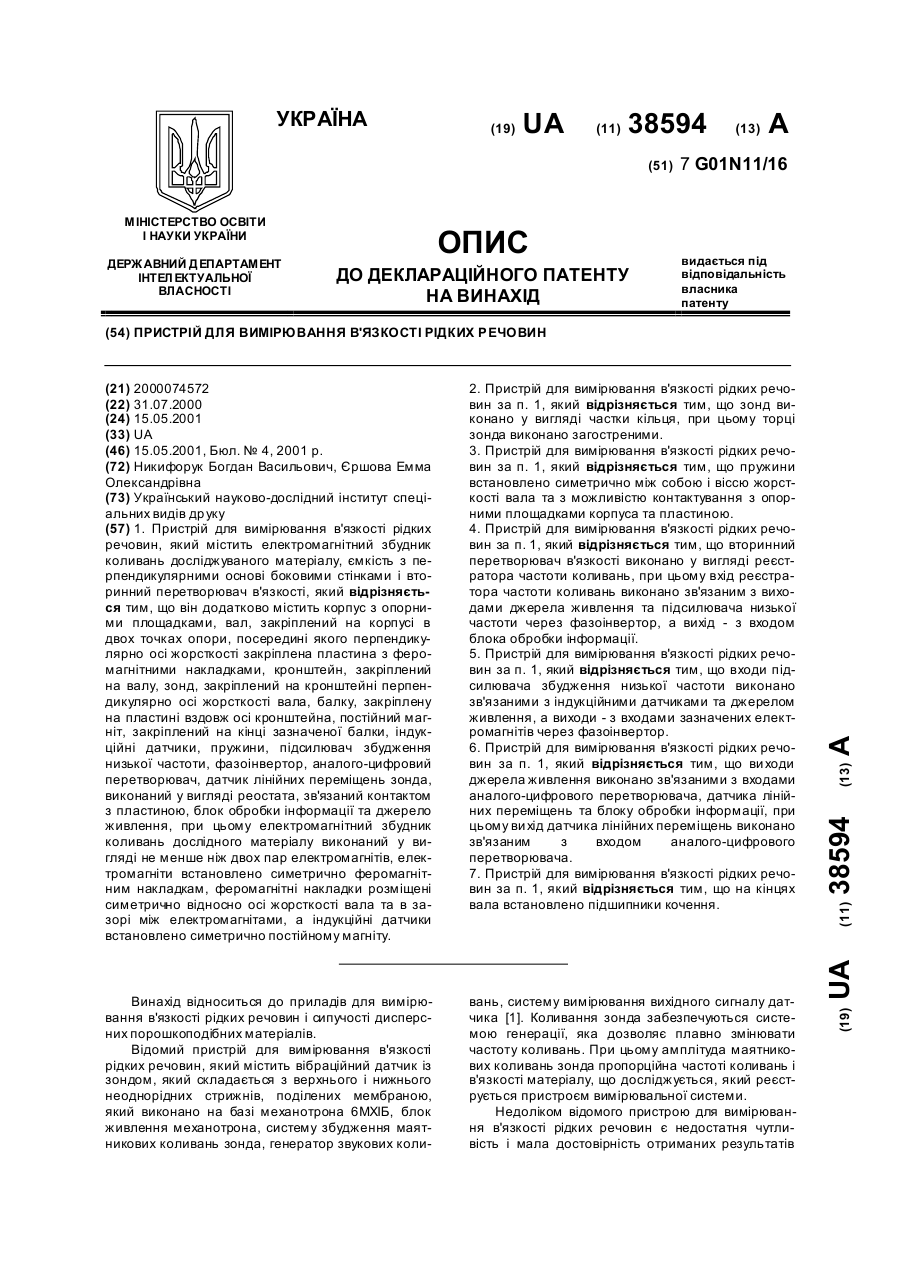
Вібродатчик в'язкості, який містить робочий орган, занурений у досліджуване середовище, корпус та електромагнітну систему збудження коливань робочого органа, який відрізняється тим, що електромагнітна система збудження коливань додатково обладнана частотоміром та джерелом живлення, робочий орган зазначеної системи виконаний у вигляді стержня із закріпленими на його нижньому кінці сильфоном, а у середній частині якорем, виконаним у вигляді пластини з феромагнітними накладками, електромагнітна система збудження коливань виконана такою, що містить не менше одного блока електровібраторів, виконаних у вигляді електромагнітів, розміщених симе U 2 (19) 1 3 36818 тільки для виявлення в'язкості рідких матеріалів та їх суміші. Найбільш близьким технічним рішенням, обраним за прототип, є вібродатчик в'язкості, який містить робочий орган, занурений у досліджуване середовище, в'язкість якого необхідно виміряти, корпус та електромагнітну систему збудження коливань робочого органа [2]. Недоліками відомого вібродатчика в'язкості, обраного за прототип, є недостатня чутливість і мала ймовірність отриманих результатів контролю через недостатню точність вимірювання. Це пояснюється тим, що система збудження маятникових коливань збуджує зонд з частотою змушених коливань (які задаються генератором коливань, що входить до конструкції пристрою). В основу корисної моделі поставлено задачу шляхом підвищення чутливості робочого органа вібродатчика забезпечити підвищення достовірності визначення величини в'язкості досліджуваного матеріалу. Рішення технічної задачі у вібродатчику в'язкості, який містить робочий орган, занурений у досліджуване середовище, корпус та електромагнітну систему збудження коливань робочого органа, досягається тим, що електромагнітна система збудження коливань додатково обладнана частотоміром та джерелом живлення, робочий орган зазначеної системи виконаний у вигляді стержня із закріпленими на його нижньому кінці сильфоном, а у середній частині - якорем, виконаним у вигляді пластини з феромагнітними накладками, електромагнітна система збудження коливань виконана такою, що містить не менше одного блока електровібраторів, виконаних у вигляді електромагнітів, розміщених симетрично площині зазначеної пластини, постійний магніт, закріплений на пластині, індукційні датчики, розташовані симетрично зазначеному магніту, пружини, встановлені симетрично площині пластини і виконані з однаковими характеристиками, підсилювач низької частоти та частотомір, корпус додатково обладнаний віконцем, кришкою та верхньою і нижньою проміжними вставками, при цьому кришка та верхня проміжна вставка виконані з центральними отворами з розташованими у них підшипниками ковзання для проходу стержня, зазначений стержень виконаний порожнистим і обладнаним у нижній частині опорною площадкою для закріплення верхньої частини сильфона, а у верхній - пробкою, у нижній проміжній вставці виконані отвори та площадка для закріплення нижньої частини згаданого сильфона, електромагніти виконані закріпленими на кришці та верхній проміжній вставці симетрично один відносно одного, пружини виконані розташованими симетрично між собою і між пластиною, кришкою та верхньою проміжною вставкою, виходи джерела живлення виконано з'єднаними з входами частотоміра та підсилювача низької частоти, виходи індукційних датчиків виконані зв'язаними з входами підсилювача низької частоти, а ви ходи останнього - з входами електромагнітів та частотоміра. Порівняльний аналіз корисної моделі з прототипом показує, що вібродатчик в'язкості, що заявляється, відрізняється від відомого тим, що елект 4 ромагнітна система збудження коливань додатково обладнана частотоміром та джерелом живлення, робочий орган зазначеної системи виконаний у вигляді стержня із закріпленими на його нижньому кінці сильфоном, а у середній частині якорем, виконаним у вигляді пластини з феромагнітними накладками, електромагнітна система збудження коливань виконана такою, що містить не менше одного блока електровібраторів, виконаних у вигляді електромагнітів, розміщених симетрично площині зазначеної пластини, постійний магніт, закріплений на пластині, індукційні датчики, розташовані симетрично зазначеному магніту, пружини, встановлені симетрично площині пластини і виконані з однаковими характеристиками, підсилювач низької частоти та частотомір, корпус додатково обладнаний віконцем, кришкою та верхньою і нижньою проміжними вставками, при цьому кришка та верхня проміжна вставка виконані з центральними отворами з розташованими у них підшипниками ковзання для проходу стержня, зазначений стержень виконаний порожнистим і обладнаним у нижній частині опорною площадкою для закріплення верхньої частини сильфона, а у верхній - пробкою, у нижній проміжній вставці виконані отвори та площадка для закріплення нижньої частини згаданого сильфона, електромагніти виконані закріпленими на кришці та верхній проміжній вставці симетрично один відносно одного, пружини виконані розташованими симетрично між собою і між пластиною, кришкою та верхньою проміжною вставкою, виходи джерела живлення виконано з'єднаними з входами частотоміра та підсилювача низької частоти, а виходи індукційних датчиків виконані зв'язаними з входами підсилювача низької частоти, а ви ходи останнього - з входами електромагнітів та частотоміра. Таким чином, вібродатчик в'язкості, що заявляється, відповідає критеріям винаходу "новизна". Суть корисної моделі пояснюється за допомогою креслень, де на Фіг.1 наведена конструктивнокомпонувальна схема вібродатчика в'язкості, на Фіг.2 наведена схема вібродатчика в'язкості, на Фіг.3 наведена блок-схема вібродатчика в'язкості, на Фіг.4-5 наведені етапи робіт вібродатчика в'язкості, на Фіг.6 наведена номограма визначення в'язкості досліджуваного матеріалу за залежностями частоти f власних коливань робочого органа від величини в'язкості n. Вібродатчик в'язкості містить корпус 1, виконаний, як варіант конструкції, циліндричної форми із закритою нижньою частиною. Всередині корпуса 1 встановлені верхня проміжна вставка 2 та нижня проміжна вставка 3. Зверху корпус 1 закривається кришкою 4. На боковій стінці корпуса 2 виконане віконце 5, закрите прозорим матеріалом. У центрі кришки 4 та у центрі верхньої проміжної вставки 2 виконані отвори 6, розташовані осесиметрично один до одного. На кришці 4 та на верхній проміжній вставці 2 виконані напливи 7, всередині яких встановлені підшипники ковзання 8. Підшипники ковзання 8 виконані, наприклад, як варіант конструкції, з фторопласту - як матеріалу, що має мінімальний коефіцієнт тертя з металевими поверхнями. Осесиметрично згаданим отворам 6 5 36818 всередині корпуса 1 розміщений стержень 9, що виконаний порожнистим. Порожнина 10 згаданого стержня 9 зверху закрита пробкою 11 (наприклад, як варіант конструкції, з нарізним з'єднанням). На нижній частині стержня 9 виконана опорна площадка 12. До опорної площадки 12 стержня 9 прикріплений своєю верхньою частиною сильфон 13. Згаданий сильфон 13 виконаний гофрованим та конусоподібної форми (як варіант конструктивного виконання). Сильфон 13 своєю нижньою частиною, діаметр якої більше діаметра верхньої частини, закріплений на опорній площадці нижньої проміжної вставки 3. На поверхні нижньої проміжної вставки 3 виконані отвори 14, частина з яких знаходиться поза зоною кріплення нижньої частини сильфона 13, а друга частина отворів 14 - під конусом сильфона 13. При цьому забезпечується надходження досліджуваної речовини 15 в середину конуса сильфона 13 при відкритій пробці 11 стержня 9. В центральній частині стержня 9 закріплений якір 16, виконаний у вигляді пластини. При цьому пластина (поз. 16) закріплена перпендикулярно осі стержня 9. На обох поверхнях зазначеної пластини (поз. 16) закріплені феромагнітні накладки 17, а на торцевій частині якоря 16 (як варіант конструктивного виконання) закріплений постійний магніт 18 (N/S). На внутрішній поверхні 19 стінок корпуса 1 (як варіант конструктивного виконання) закріплені індукційні датчики 20, причому датчики 20 закріплені осесиметрично один до одного та симетрично відносно постійного магніту 18. На кришці 4 та на верхній проміжній вставці 2 закріплені електровібратори 21, виконані у вигляді електромагнітів. Якір 16 встановлений так, щоб відстані, відповідно між датчиками 20 та постійним магнітом 18, а також між електромагнітами (поз. 21) та феромагнітними накладками 17 були однаковими. Між кришкою 4 та якорем 16, а також між верхньою проміжною вставкою 2 та якорем 16 розміщені пружини 22, виконані з однаковими характеристиками. Як варіант конструктивного виконання, пружини 22 розміщені осесиметрично відносно стержня 9. Від поперечних переміщень пружини 22 фіксуються виступами 23, виконаними як на напливах 7, так і на якорі 16. Проміжні вставки 2 та 3, а також кришка 4 прикріплюються до внутрішньої поверхні 19 стінок корпуса 1 за допомогою елементів кріплення 24. До складу устаткування, призначеного для забезпечення роботи вібродатчика в'язкості, також входять: підсилювач низької частоти 25, частотомір 26 та джерело живлення 27. Виходи індукційних датчиків виконані з'єднаними з входом підсилювача низької частоти 25, виходи якого з'єднані з входами електромагнітів (поз. 21) та частотоміра 26. Виходи джерела живлення 27 з'єднані з входом частотоміра 26 та входом підсилювача низької частоти 25. На прозорому матеріалі, що закриває віконце 5, яке виконане у стінці корпуса 1, нанесена контрольна мітка 28, яка відмічає допустимий рівень заповнення внутрішньої порожнини 29 корпуса 1. Злив досліджуваної речовини 15 з внутрішньої порожнини 29 корпуса 1 здійснюється через кран зливу 30. Вібродатчик в'язкості працює таким чином. Попередньо через порожнину 10 стержня 9 у внут 6 рішню порожнину 29 корпуса 1 заливають досліджувану речовину 15 до рівня контрольної мітки 28, що нанесена на прозорий матеріал, який закриває віконце 5, виконане у корпусі 1. Після цього пробку 11 закривають, герметизуючи тим самим внутрішню порожнину 29 корпуса 1. Після цього визначають в'язкість досліджуваної речовини 15. Вмикають прилад шляхом подавання електричного сигналу з джерела живлення 27 на входи підсилювача низької частоти 25 та частотоміра 26. Одночасно з цим у схемі електромагнітної системи збудження коливань, що містить послідовно з'єднані між собою індукційні датчики 20, які знаходяться у взаємодії з постійним магнітом 18, підсилювач низької частоти 25 та електромагніти 21, відбувається наступне. Один з датчиків 20, наприклад, нижній (згідно із схемою на Фіг.1-2), що знаходиться у магнітному полі (N/S) постійного магніту 18, починає виробляти сигнал у вигляді електрорушійної сили (ЕРС) індукції, який надходить до підсилювача збудження низької частоти 25. У підсилювачі низької частоти 25 сигнал з датчика 20 підсилюється та подається на вхід електромагніту (поз. 16), наприклад, верхнього (згідно зі схемою на Фіг.1-2, Фіг.4). В обмотках електромагніту (поз. 21) виробляється електромагнітне поле, енергія якого буде направлена на притягання до згаданого електромагніту (поз. 21) феромагнітної накладки 17 і, як наслідок, якоря 16. Наприклад, посилений сигнал з підсилювача низької частоти 25 був поданий на верхній (у блоці) електромагніт 21, (закріплений на кришці 4). При цьому, як вже було описано вище, якір 16 починає притягатися до згаданого верхнього електромагніту 21, стискаючи при цьому вер хню (згідно зі схемами на Фіг.1-4) пружину 22. Якір 16 разом зі стержнем 9 буде переміщуватись у сторону верхнього електромагніту 21 доти, поки сила стиснення верхньої пружини 22 не стане рівною силі електромагнітного поля, яке створює електромагніт 21 (див. Фіг.4). В момент рівності сил пружності пружини 22 та електромагнітного поля, яке створює електромагніт 21, переміщення стержня 9 з якорем 16 припиниться. Закріплений на якорі 16 постійний магніт 18 також припинить переміщення відносно датчиків 20. При цьому задіяний у перший півперіод коливань датчик 20 припинить виробляти сигнал у вигляді ЕРС індукції, а це, у свою чергу, приведе до того, що зникне сигнал, який подається на підсилювач низької частоти 25. При припиненні подачі сигналу на підсилювач низької частоти 25 припиниться подача посиленого сигналу на задіяний у перший півперіод коливань електромагніт 21. У зв'язку з цим зникне електромагнітне поле, і під дією енергії розтискування верхньої пружини 22 якір 16 почне переміщуватись у протилежну сторону. При переміщенні під дією пружини 22 стержня 9 з якорем 16 у протилежну сторону (відносно першого півперіоду коливань) сторону, постійний магніт 18 своїм магнітним полем (N/S) почне діяти на інший індукційний датчик 20 (верхній за схемою на Фіг.1-4). Верхній індукційний датчик 20 починає виробляти сигнал у вигляді ЕРС індукції, рівний за розміром попередньому сигналу, але іншого знаку. Сигнал у вигляді ЕРС індукції надходить до підси 7 36818 лювача збудження низької частоти 25. В підсилювачі низької частоти 25 сигнал з датчика 20 підсилюється та подається на вхід електромагніту 21 (нижнього за схемами на Фіг.1-2 та Фіг.5, закріпленого на верхній проміжній вставці 2). В обмотках вказаного електромагніту (поз. 21) виробляється електромагнітне поле, енергія якого буде направлена на притягання до згаданого електромагніту (поз. 21) феромагнітної накладки 17, як наслідок, якоря 16 (див. Фіг.5). Якір 16 починає притягуватися до нижнього електромагніту 21, переміщуючи при цьому стержень 9 вниз (згідно з схемою на Фіг.5). При переміщенні вниз стержня 9 разом з якорем 16 стискається нижня пружина 22, яка у процесі стискання буде накопичувати енергію. Стержень 9 з якорем 16, досягнувши при переміщенні рівноважного положення відносно пружини 22, зупиниться. При цьому закріплений на якорі 16 постійний магніт 18 також припинить переміщення відносно датчиків 20 і задіяний у перший півперіод коливань датчик 20 припинить виробляти сигнал у вигляді ЕРС індукції. Це, у свою чергу, призведе до того, що зникне сигнал, який подається на підсилювач низької частоти 25. При припиненні подавання сигналу на підсилювач низької частоти 25 припиниться подавання підсиленого сигналу на задіяний у другий півперіод коливань електромагніт 21 (нижній - за схемою на Фіг.1-2, Фіг.5). У зв'язку з цим зникне електромагнітне поле і під дією енергії розтискування нижньої пружини 22 якір почне переміщува тись у зворотний бік. При переміщенні під дією пружини 22 стержня 9 з якорем 16 у зворотний (відносно першого півперіоду коливань) бік, постійний магніт 18 своїм магнітним полем (N/S) починає діяти на інший індукційний датчик 20 (нижній - за схемою на Фіг.1-2). Нижній індукційний датчик 20 починає виробляти сигнал у вигляді ЕРС індукції, що дорівнює за величиною попередньому сигналу, але іншого знаку за відношенням до знаку сигналу у другий півперіод коливань. Процес буде повторюватися. Таким чином, виникають авторезонансні коливання системи "стержень з якорем - пружини" з власною частотою, яка залежить від жорсткості коливальної системи та в'язкості речовини, в яку занурюється робочий орган, виконаний у вигляді стержня 9 із закріпленим на його нижньому кінці сильфоном 13. У процесі поздовжніх переміщень стержня 9 із закріпленим на ньому сильфоном 13 (відносно підшипників ковзання 8 див. Фіг.1-2) відбувається поетапне стискування/розтискування ємності сильфона 13. При стисканні сильфона 13 відбувається виштовхування досліджуваного матеріалу 15 з внутрішньої порожнини сильфона 13 через отвори 14, які виконані у нижній проміжній вставці 3, у внутрішню порожнину 29 корпуса 1, а при розширенні - втягування через згадані отвори 14 (у нижній проміжній вставці 3) досліджуваного матеріалу 15 всередину порожнини сильфона 13. Чим менша в'язкість v досліджуваного матеріалу 15, тим з більшою частотою f буде відбува тися перекачування досліджуваного матеріалу 15 з внутрішньої порожнини сильфона 13 у порожнину 29 корпуса 1 і навпаки. 8 На підставі цього попередньо будується залежність частоти f власних коливань робочого органа приладу від в'язкості n досліджуваного матеріалу. Для цього у порожнину 29 корпуса 1 заливають досліджуваний матеріал 15, в'язкість n і якого визначена за допомогою відомих методик та пристроїв [3], і при кожному черговому заповненні матеріалом 15 визначають частоту fі власних коливань динамічної системи приладу. На підставі даних контролю будують номограму залежності ff(n) (див. Фіг.6). У процесі контрольного визначення в'язкості n невідомого матеріалу визначають частоту f1 власних коливань динамічної системи, на осі f вибирають отримане значення f1, проводять перпендикуляр з цієї точки до кривої залежності f=f(n) і з точки перетину з кривою згаданого графіка опускають перпендикуляр на вісь n і до перетину з нею. Отримана величина n i є фактичною величиною в'язкості n контрольованого (досліджуваного) матеріалу. Якщо в'язкість n досліджуваного матеріалу занадто велика, то частота f власних коливань буде малою. Визначення в'язкості n 2 досліджуваного матеріалу виконується аналогічно вищенаведеному (за контрольною частотою f2 - див. Фіг.6). На цьому процес контрольних досліджень з визначення в'язкості досліджуваного матеріалу завершується. Прилад вимикають у зворотній послідовності. Зливання досліджуваного матеріалу 15 з ємності (внутрішньої порожнини 29 корпуса 1) після проведення контрольних замірів частоти власних коливань зонда робиться через кран зливу 30. Підвищення ефективності застосування вібродатчика в'язкості порівняно з прототипом досягається за рахунок підвищення чутливості робочого органа до в'язкості досліджуваного матеріалу. Підвищення чутли вості робочого органа приладу досягається за рахунок того, що принцип дії вібродатчика в'язкості, що заявляється, заснований на створенні самозбуджувального контуру, який складається з якоря, що занурений у досліджуваний матеріал, індукційних датчиків, пружин, електромагнітів та зв'язаного з ними підсилювача збудження низької частоти, при цьому система "стержень з якорем - пружини" в цьому контурі є частотно-вибірковою ланкою, яка дозволяє збуджувати коливання динамічної системи тільки з авторезонансною частотою. Використання у пристрої контуру самозбудження, а в контурі - високочутливого індукційного датчика велосиметричного типу, забезпечує значне підвищення точності вимірювання в'язкості досліджуваного матеріалу. Джерела інформації 1. А.с. СРСР №238875, МПК G01N11/16, 1966 - аналог. 2. А.с. СРСР №775667, МПК G01N11/16, 1980 (бюл. №40) - прототип. 3. Орел Н.И., Губачек Э.В., Березин Б.И., Водолазская В.М. Справочник технологаполиграфиста. - Ч. 5. Печатные краски. - М.: Книга, 1988. - С. 188-201, параграф 4.3. Реологические свойства красок для издательских целей. 9 36818 10 11 Комп’ютерна в ерстка М. Ломалова 36818 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVibro-indicator of viscosity
Автори англійськоюVorobiov Vitalii Ivanovych, Yershova Emma Oleksandrivna, Zaikivskyi Oleksandr Boleslavovych, Shvets Yurii Volodymyrovych
Назва патенту російськоюВибродатчик вязкости
Автори російськоюВоробьев Виталий Иванович, Ершова Эмма Александровна, Зайкивский Александр Болеславович, Швец Юрий Владимирович
МПК / Мітки
МПК: G01N 11/16
Мітки: в'язкості, вібродатчик
Код посилання
<a href="https://ua.patents.su/6-36818-vibrodatchik-vyazkosti.html" target="_blank" rel="follow" title="База патентів України">Вібродатчик в`язкості</a>
Вібродатчик в’язкості
Номер патенту: 38125
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович, Комаров Володимир Олександрович
МПК: G01N 11/00, G01N 11/10
Мітки: вібродатчик, в'язкості
Текст:
...прозорому матеріалі, що закриває віконце 5, яке виконане у стінці корпуса 1, нанесена контрольна мітка 28, яка відмічає допустимий рівень заповнення внутрішньої порожнини 29 корпуса 1. Злив досліджуваної речовини 15 з внутрішньої порожнини 29 корпуса 1 здійснюється через кран зливу 30. Вібродатчик в'язкості працює таким чином. Попередньо через порожнину 10 стержня 9 у внутрішню порожнину 29 корпуса 1 заливають досліджувану речовину 15 (до...
Пристрій для вимірювання в’язкості рідких речовин
Номер патенту: 38594
Опубліковано: 15.05.2001
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16, G01N 11/10
Мітки: пристрій, рідких, в'язкості, вимірювання, речовин
Текст:
...речовина може бути нафта, бензин, гас, рідкі фарби, мастила та інші матеріали, які мають можливість коливатися) у кількості, щоб зонд 8 був закритий речовиною повністю, але не менше, ніж на половину довжини кронштейна 7. Вмикається прилад, подається напруга з джерела живлення 21 по електричних кабелях 24 на входи вторинного перетворювача в'язкості (реєстратора частоти коливань) 22, аналого-цифрового перетворювача 19, датчика лінійних...
Спосіб визначення в’язкості дисперсного середовища
Номер патенту: 38126
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович, Комаров Володимир Олексадрович
МПК: G01N 11/10, G01N 11/00
Мітки: середовища, в'язкості, дисперсного, спосіб, визначення
Текст:
...(див. фіг. 4-5). 2 38126 Проводять перевірку занурення робочого органа 11 у досліджуваний матеріал (речовину) 22. Робочий орган 11 датчика в'язкості повинен бути цілком зануреним у згаданий досліджуваний матеріал (речовину) 22. Вмикають блок (джерело) живлення 19 і подають живлення на підсилювач збудження 17 і прилад 18, який реєструє. При взаємодії магнітного поля постійного магніту 12 з індукційними датчиками 14 в одному з них (наприклад,...
Пристрій для вимірювання в’язкості рідких речовин
Номер патенту: 36051
Опубліковано: 10.10.2008
Автори: Воробйов Віталій Іванович, Єршова Емма Олександрівна, Зайківський Олександр Болеславович, Швець Юрій Володимирович
МПК: G01N 11/16
Мітки: в'язкості, речовин, вимірювання, рідких, пристрій
Формула / Реферат:
Пристрій для вимірювання в'язкості рідких речовин, який містить електромагнітний збуджувач коливань досліджуваного матеріалу, ємність з перпендикулярними основі боковими стінками і вторинний перетворювач в'язкості, який відрізняється додатковим спорядженням його корпуса опорними площадками, виконанням вала закріпленим на корпусі в двох точках опори, закріпленням посередині вала перпендикулярно його осі жорсткості пластини з феромагнітними...
Спосіб визначення в’язкості
Номер патенту: 44152
Опубліковано: 15.01.2002
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: визначення, в'язкості, спосіб
Формула / Реферат:
Спосіб визначення в'язкості дисперсного середовища, що містить занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди його коливань, якими відрізняється тим, що збуджують коливання зонда з власною/авторезонансною частотою, заміряють частоту і амплітуду власних/авторезонансних коливань зонда без занурення його у досліджуване середовище, заміряють при цьому...
Попередній патент: Коливальний віскозиметр
Наступний патент: Спосіб визначення в’язкості дисперсного середовища
Випадковий патент: Пристрій для виготовлення деталей штампуванням