Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: Падалко Віктор Григорович, МАЙ ІГОР ДМИТРОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Мирошниченко Михайло Іванович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович

Формула / Реферат
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки, інформаційний вхід якого підключений до виходу блока накопичення, а тактовий вхід з'єднаний з третім виходом синхронізатора, вирішувальний блок виконаний (m+1)-входовим, перший інформаційний вхід його з'єднаний з виходом блока обробки та входом першого блока пам'яті з ланцюжка, що складається з m послідовно з'єднаних блоків пам'яті з об'єднаними тактовими входами, підключеними до четвертого виходу синхронізатора, виходи блоків пам'яті з'єднані з іншими відповідними входами вирішувального блока, перший та другий багатовходові суматори, віднімач, додатковий блок пам'яті, аналізатор зміни знака, функціональний перетворювач, двовходовий суматор, вентильну схему та блок стробування, причому входи першого та входи другого багатовходових суматорів з'єднані відповідно з першими і останніми входами вирішувального блока, виходи багатовходових суматорів з'єднані зі входами віднімача, вихід якого підключений до входу додаткового блока пам'яті та перших входів функціонального перетворювача і аналізатора зміни знака, до других входів яких підключений вихід додаткового блока пам'яті, тактовий вхід якого з'єднаний з четвертим виходом синхронізатора, вихід функціонального перетворювача підключений да першого входу двовходового суматора, другий вхід якого з'єднаний з давачем коду азимутального положення антени, а вихід з'єднаний з інформаційним входом блока стробування, входи вентильної схеми з'єднані відповідно з виходом вирішувального блока та виходом аналізатора зміни знака, вихід вентильної схеми підключений до керуючого входу блока стробування, інформаційний вихід якого є виходом пристрою.
2. Пристрій за п. 1, який відрізняється тим, що m є непарним цілим числом.
Текст
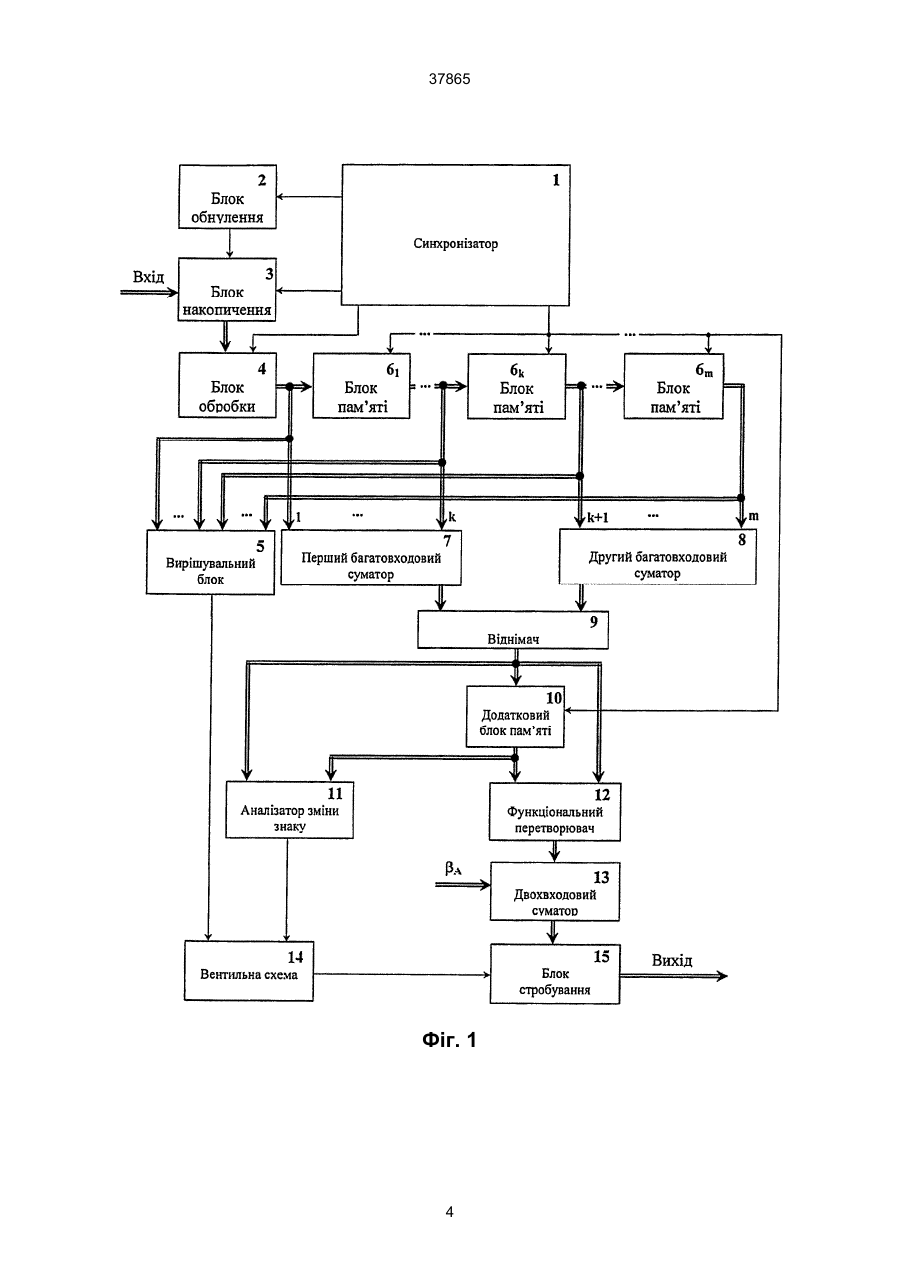
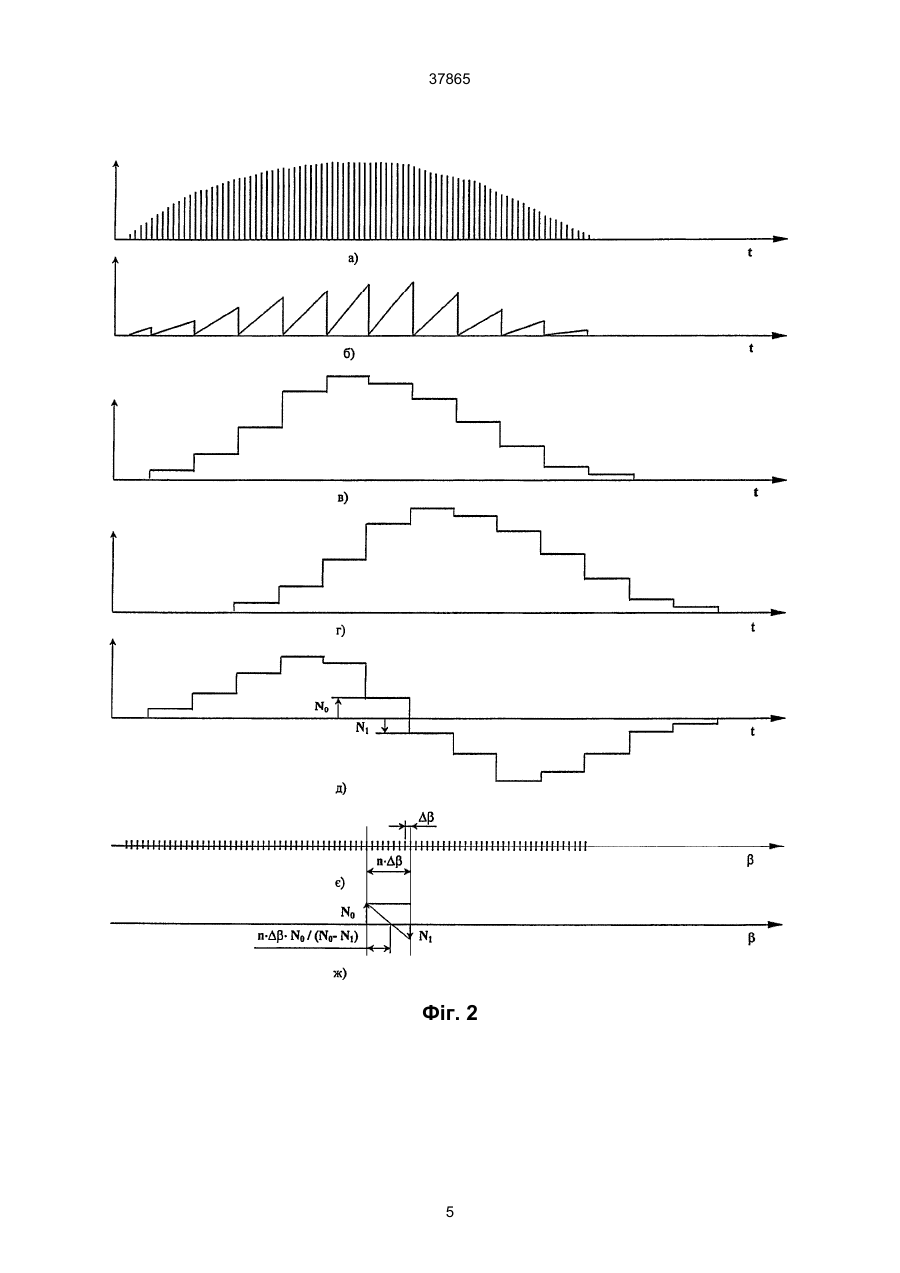
1. Пристрій обробки сигналів радіолокаційної інформації, який містить накопичувач та вирішувальний блок, що складається з суматора та схеми порівняння, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнуління, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнуління з'єднаний з виходом блоку обнуління, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки, інформаційний вхід якого підключений до виходу блока накопичення, а тактовий вхід з'єднаний з третім виходом синхронізатора, (m+1)-входовий вирішувальний блок, перший інформаційний вхід якого з'єднаний з виходом блоку обробки та входом першого блоку пам'яті з ланцюжка, що складається з m послідовно з'єднаних блоків па A (54) ПРИСТРІЙ ОБРОБКИ СИГНАЛІВ РАДІОЛОКАЦІЙНОЇ ІНФОРМАЦІЇ 37865 ревищення сигналу, що аналізується, по відношенню до оцінки в задане число разів. В той же час сигнали від цілей, що мають високі радіальні швидкості, при різних частотах вобуляції потраплятимуть у різні допплерівські фільтри. При цьому сигнал на виході пристрою усереднення буде оцінкою шумових складових, тому сигнал, що аналізується, в тому допплерівському каналі, який має оптимальну амплітудно-частотну характеристику для даної швидкості цілі, перевищить оцінку шумових складових в задане число разів і на виході схеми порівняння буде сформований сигнал дозволу для вентильної схеми (сигнал логічної одиниці). В результаті сигнал з даного каналу через схему АБО потрапить на бінарний накопичувач, який дозволяє виявити ціль навіть при пропусках її на одній чи кількох частотах слідування, коли сигнали від цілі і дискретної пасивної завади потрапляють в один і той же допплерівський фільтр. Недоліком такого пристрою є збільшення помилково виявлених цілей через амплітудну модуляцію сигналів (чи то випадкову флуктуаційну модуляцію при електронному способові сканування простору, чи за рахунок діаграми направленості (ДН) антени при механічному способові сканування простору), тому як для оцінки може бути взята спотворена величина сигналу. Відомий також пристрій обробки сигналів радіолокаційної інформації (див.: Клюев Н.Ф. 0бнаужение импульсных сигналов с помощью накопителей дискретного действия. – М.: Сов. Радио, 1963), що містить N-1 блоків пам'яті, в яких фіксується інформація про кожне з останніх N-1 зондувань, де N - число імпульсів в пачці сигналів, що виявляються, а також вирішувальний блок, який складається з N-входового суматора і схеми порівняння. Такий пристрій високоефективно виявляє слабкі сигнали за рахунок обробки сигналів, що квантовані на багато рівнів. Недоліком такого пристрою є великий об'єм пам'яті та складність реалізації N-входового суматора багаторозрядних кодів, особливо при великих значеннях N. Ще одним недоліком пристрою є зниження точності визначення азимутальної координати, що є платнею за значне зменшення апаратури. Крім того, симетрична вагова функція обробки, а значить і потенційно можлива точність, при визначенні азимутальної координати може бути отримана тільки при непарному числі m. В основу винаходу поставлено задачу підвищення точності визначення азимутальної координати в оглядовій РЛС. Це досягається тим, що в пристрої обробки сигналів радіолокаційної інформації, який містить накопичувач та вирішувальний блок, що складається з суматора та схеми порівняння, згідно з винаходом, пристрій містить синхронізатор з чотирма виходами, блок обнуління, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнуління з'єднаний з виходом блоку обнуління, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки, інформаційний вхід якого підключений до виходу блока накопичення, а тактовий вхід з'єднаний з третім виходом синхронізатора, (m+1)-входовий вирішувальний блок, перший інформаційний вхід якого з'єднаний з виходом блоку обробки та входом першого блоку пам'яті з ланцюжка, що складається з m послідовно з'єднаних блоків пам'яті з об'єднаними тактовими входами, підключеними до четвертого виходу синхронізатора, виходи блоків пам'яті з'єднані з іншими відповідними входами вирішувального блоку. Крім того, пристрій містить перший та другий багатовходові суматори, віднімач, додатковий блок пам'яті, аналізатор зміни знаку, функціональний перетворювач, двохвходовий суматор, вентильна схема і блок стробування, причому входи першого та входи другого багатовходових суматорів з'єднані, відповідно, з першими і останніми входами вирішувального блоку, виходи багатовходових суматорів з'єднані зі входами віднімача, вихід якого підключений до входу додаткового блоку пам'яті та перших входів функціонального перетворювача і аналізатора зміни знаку, до других входів яких підключений вихід додаткового блоку пам'яті, тактовий вхід якого з'єднаний з четвертим виходом синхронізатора, вихід функціонального перетворювача підключений до першого входу двовходового суматора, другий вхід якого з'єднаний з давачем коду азимутального положення антени, а вихід з'єднаний з інформаційним входом блоку стробування, входи вентильної схеми з'єднані відповідно з виходом вирішувального блоку та виходом аналізатора зміни знаку, вихід вентильної схеми підключений до управляючого входу блоку стробування, інформаційний вихід якого є виходом пристрою, а число блоків пам'яті m є непарним цілим числом. Суть винаходу пояснюється блок-схемою пристрою (Фіг. 1) та виглядом сигналів (Фіг. 2). Запропонований пристрій містить синхронізатор 1 з чотирма виходами, блок обнуління 2, вхід якого з'єднаний з першим виходом синхронізатора 1, блок накопичення 3, інформаційний вхід якого є входом пристрою, вхід обнуління з'єднаний з виходом блоку обнуління 2, а тактовий вхід з'єднаний з другим виходом синхронізатора 1, блок обробки 4, інформаційний вхід якого підключений до виходу блока накопичення 3, а тактовий вхід з'єднаний з третім виходом синхронізатора 1, (m+1)-входовий вирішувальний блок 5, перший інформаційний вхід якого з'єднаний з виходом блоку обробки 4 та входом першого блоку пам’яті 6 з ланцюжка, що складається з m послідовно з'єднаних блоків пам'яті 6 з об'єднаними тактовими входами, підключеними до четвертого виходу синхронізатора 1, а число блоків пам'яті m є непарним цілим числом, виходи блоків пам'яті 6 з'єднані з іншими відповідними входами вирішувального блоку 5, перший багатовходовий суматор 7 та другий багатовходовий суматор 8, віднімач 9, додатковий блок пам'яті 10, аналізатор зміни знаку 11, функціональний перетворювач 12, двовходовий суматор 13, вентильна схема 14 і блок стробування 15. Входи першого багатовходового суматора 7 та входи другого багатовходового суматора 8 з'єднані відповідно з першими і останніми входами вирішувального блоку 5, виходи багатовходових суматорів 7 та 8 з'єднані зі входами віднімача 9, вихід якого підключений до входу додаткового блоку пам'яті 10 та перших входів аналізатора зміни знаку 11 і функціонального перетворювача 12, до дру 2 37865 гих входів яких підключений вихід додаткового блоку пам'яті 10, тактовий вхід якого з'єднаний з четвертим виходом синхронізатора 1, вихід функціонального перетворювача 12 підключений до першого входу двовходового суматора 13, другий вхід якого з'єднаний з давачем коду азимутального положення антени, а вихід з'єднаний з інформаційним входом блоку стробування 15, входи вентильної схеми 14 з'єднані відповідно з виходом вирішувального блоку 5 та виходом аналізатора зміни знаку 11. вихід вентильної схеми 14 підключений до управляючого входу блоку стробування 15, інформаційний вихід якого є виходом пристрою. Запропонований пристрій працює наступним чином. Протягом n зондувань в блокові накопичення 3 відбувається накопичення k-розрядного вхідного коду. На n-ому зондуванні результат накопичення у вигляді 1-розрядного коду надходить на інформаційний вхід блоку обробки 4, де приймається рішення про наявність та величину сигналу протягом n зондувань. Сигнали на вході та виході блоку накопичення 3 подані на Фіг. 2. Результат обробки в кожному елементі дальності у вигляді 1-розрядного коду надходить на інформаційний вхід першого блоку пам'яті 6 з ланцюжка, що складається з m послідовно з'єднаних блоків пам'яті 6. Одночасно з цим на вхід обнуління блоку накопичення 3 надходить команда з виходу блоку обнуління 2, яка стирає накопичену інформацію. Ці операції (накопичення, обробки та обнуління) повторюються на кожному n-ому зондуванні. Це дає змогу отримати виграш в об'ємі пам'яті. Одночасно на n-ому зондуванні інформація кожного блоку пам'яті 6 переписується в послідуючий блок пам'яті 6, причому загальне число блоків пам'яті 6 m є непарним, що дозволяє зберегти симетричну вагову функцію при подальшій обробці сигналів. З виходів всіх блоків пам'яті 6, а також з виходу блоку обробки 4 сигнали (загальною кількістю m+1) надходять на входи вирішувального блоку 5, перша половина їх [(m+1)/2] обробляється також в першому багатовходовому суматорі 7, друга половина [(m+1)/2] - в другому багатовходовому суматорі 8. Сигнали на виходах першого багатовходового суматора 7 та другого багатовходового сума тора 8 представлені на фіг.2, в та фіг.2, г, відповідно. Віднімач 9 формує дискримінаторну функцію (сигнали на його виході представлені на фіг.2, д), яка має дискретний характер, а похибка визначення азимутальної координати визначається співвідношенням D = n × Db / 2, де Db - кутове азимутальне зміщення антени за період одного зондування. Однак, якщо відомі значення N0 та N1, тобто величини сигналів на виході віднімача 9 на такті обробки, що передує зміні знаку, та наслідує йому, а це забезпечується за допомогою додаткового блоку пам'яті 10, то уточнене значення азимутальної координати може бути визначене з виразу (див. фіг. 2, є та фіг. 2, ж) b = n × Db × N 0 /( N 0 - N1 ). Ця залежність закладена в функціональний перетворювач 12, тому точність визначення азимутальної координати в пристрої наближена до точності звичайної вагової обробки і похибка визначення азимутальної координати не перевищує Db/2. А точне значення азимуту цілі визначається в двохвходовому суматорі 13, де до уточненого значення азимутальної координати з виходу функціонального перетворювача 12 додається значення коду азимутального положення антени bА, що відповідає тактові обробки сигналів, який передує зміні знаку дискримінаторної функції. На вихід пристрою інформація надходить за допомогою блоку стробування 15 тільки тоді, коли відбулася зміна знаку сигналу на виході віднімача 9 і при цьому у вирішувальному блоці 5 прийняте рішення про виявлення цілі в даному елементі дальності (дозволяючий управляючий сигнал для блоку стробування 15 формується вентильною схемою 14). Таким чином, у запропонованому пристрої при значному скорочені загального об'єму пам'яті точність визначення алимутальної координати в оглядовій РЛС наближена до точності звичайної вагової обробки. 3 37865 Фіг. 1 4 37865 Фіг. 2 5 37865 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for processing radar information
Автори англійськоюMyroshnychenko Mykhailo Ivanovych, Tomachynskyi Mykola Tymofiiovych, KUKOLNITSKYI ANATOLII PYLYPOVYCH, Kononovych Viktor Yakovych, Kopnov Mykhailo Oleksandrovych, Mai Ihor Dmytrovych, Nemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych
Назва патенту російськоюУстройство для обработки радиолокационной информации
Автори російськоюМирошниченко Михаил Иванович, Томачинский Николай Тимофеевич, КУКОЛЬНИЦКИЙ АНАТОЛИЙ ФИЛИППОВИЧ, Кононович Виктор Яковлевич, Копнов Михаил Александрович, Май Игорь Дмитриевич, Немчин Александр Федорович, Мокеев Юрий Геннадьевич
МПК / Мітки
МПК: G01S 13/00, G01S 13/42, G01S 13/526
Мітки: сигналів, пристрій, обробки, радіолокаційної, інформації
Код посилання
<a href="https://ua.patents.su/6-37865-pristrijj-obrobki-signaliv-radiolokacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій обробки сигналів радіолокаційної інформації</a>
Пристрій обробки радіолокаційної інформації
Номер патенту: 39461
Опубліковано: 15.06.2001
Автори: Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 13/56, G01S 13/00
Мітки: інформації, пристрій, обробки, радіолокаційної
Формула / Реферат:
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплеровських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплеровський фільтр, вхід якого є входом доплерівського фільтрового каналу, q-входову схему АБО та бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, який ваідрізняється тим, що кожний доплеровський канал містить блок визначення рівня шуму та лінію затримки, об'єднані...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: Траілін Вячеслав Федорович, Лаврентьєв Володимир Миколайович, Мокеєв Юрій Геннадійович, Падалко Віктор Григорович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Мирошниченко Михайло Іванович
МПК: G01S 7/02
Мітки: пристрій, інформації, виявлення, сигналів
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій автоматичного виявлення сигналів інформації
Номер патенту: 37870
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Немчин Олександр Федорович, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, Козловський Петро Леонідович
МПК: G01S 7/36
Мітки: сигналів, автоматичного, виявлення, пристрій, інформації
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій обробки інформації
Номер патенту: 38733
Опубліковано: 15.05.2001
Автор: Чумаченко Ігор Володимирович
МПК: G06F 7/48, G06F 17/11
Мітки: інформації, пристрій, обробки
Текст:
...виходи четвертого операційного блоку 6 з'єднані з другою групою входів третього мультиплексора 12, виходи якого з'єднані з першою групою входів др угого м ультиплексора 11, виходи другого мультиплексора 11 з'єднані з шиною результату 2. Всі елементи, що входять до складу пристрою є відомими елементами автоматики і обчислювальної техніки і можуть бути виконані за будь-якою відомою схемою. Працює пристрій обробки інформації таким чином....
Пристрій обробки сигналу піровідикона

Номер патенту: 47718
Опубліковано: 15.07.2002
Автори: Шклярський Володимир Іванович, Гой Віталій Миколайович, Кондратов Петро Олександрович
МПК: H04N 5/33
Мітки: піровідикона, обробки, сигналу, пристрій
Формула / Реферат:
Пристрій обробки сигналу піровідикона, який містить перший аналого-цифровий перетворювач, блок пам'яті, перший та другий комутатори, різницевий підсилювач, блок синхронізації, цифро-аналоговий перетворювач, причому вхід першого аналого-цифрового перетворювача з'єднаний із входом пристрою, а вихід першого аналого-цифрового перетворювача через другий комутатор під'єднаний до входу блока пам'яті та другого входу першого комутатора, вихід якого є...
Попередній патент: Рекламно-інформаційний блок
Наступний патент: Пристрій критерійної обробки радіолокаційної інформації
Випадковий патент: Лита куксова вкладка для реставрації зубів