Пристрій критерійної обробки радіолокаційної інформації
Номер патенту: 37866
Опубліковано: 15.05.2003
Автори: МАЙ ІГОР ДМИТРОВИЧ, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, Мирошниченко Михайло Іванович

Формула / Реферат
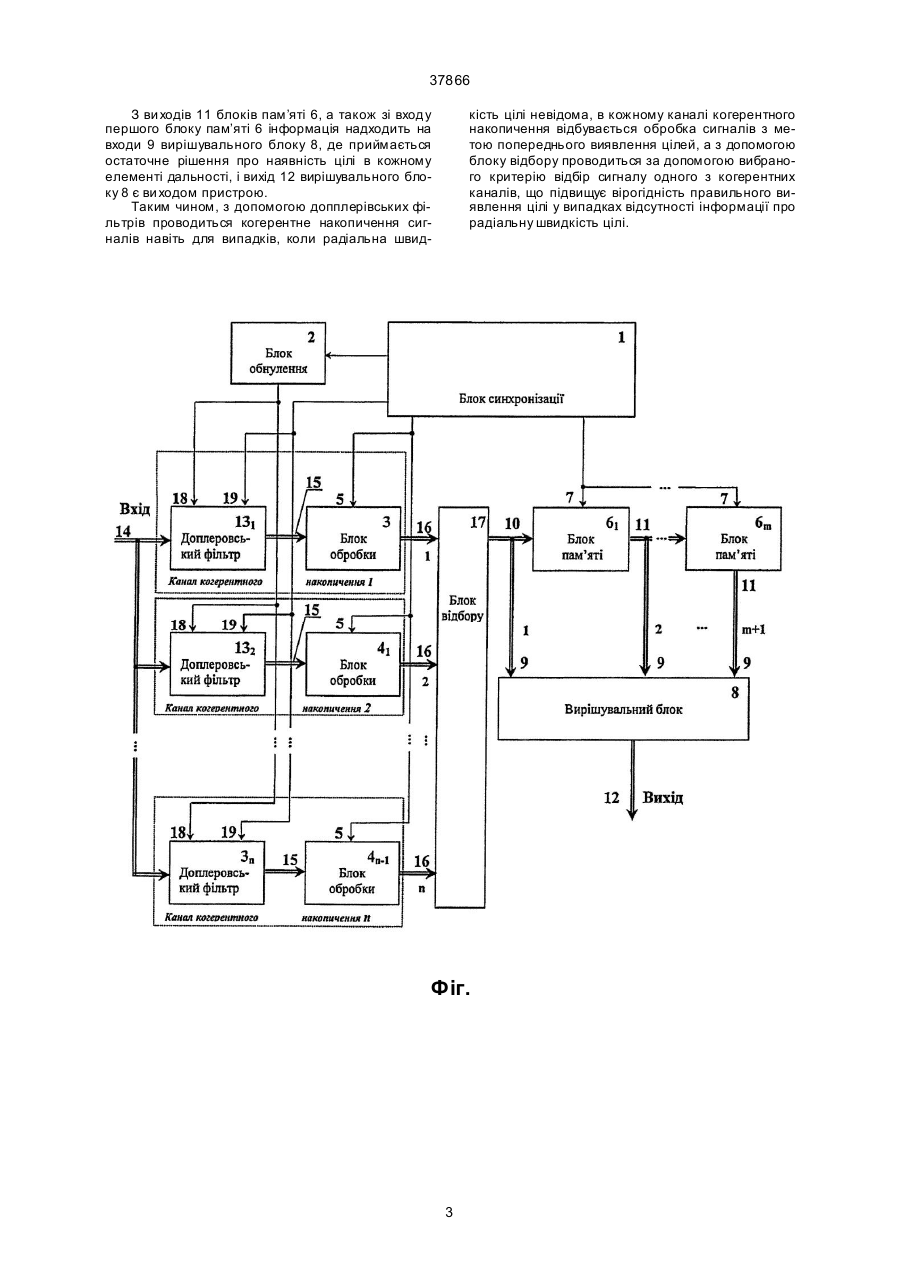
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті та вирішувальний блок, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом блока синхронізації, блок обробки, ланцюжок з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключеними до четвертого виходу блока синхронізації, вирішувальний блок виконаний з m+1 входами, з'єднаними відповідно зі входом першого блока пам'яті та з виходами кожного блока пам'яті, вихід вирішувального блока є виходом пристрою, n доплерівських фільтрів з об'єднаними між собою входами, що є входом пристрою, n-1 додаткових блоків обробки та блок відбору, тактові входи всіх блоків обробки з’єднані з третім виходом блока синхронізації, інформаційні входи блоків обробки підключені до виходів відповідних доплерівських фільтрів, об'єднані входи обнулення і об'єднані тактові входи доплерівських фільтрів підключені відповідно до виходу блока обнулення та до другого виходу блока синхронізації, інформаційні виходи блоків обробки з'єднані зі входами блока відбору, а вихід блока відбору підключений до входу першого блока пам'яті, кожен доплерівський фільтр, з'єднаний з блоком обробки, є каналом когерентного накопичення.
Текст
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті, а також вирішувальний блок, який складається із входового суматора та схеми порівняння, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнуління, вхід якого з'єднаний з першим виходом блоку синхронізації, блок обробки, тактовий вхід якого з'єднаний з третім 37866 вади потрапляють в один і той же допплерівський фільтр. Недоліком такого пристрою є збільшення помилково виявлених цілей через амплітудну модуляцію сигналів (чи то випадкову флуктуаційну модуляцію при електронному способові сканування простору, чи за рахунок діаграми направленості (ДН) антени при механічному способові сканування простору), тому як для оцінки може бути взята спотворена величина сигналу. Відомий пристрій критерійної обробки радіолокаційної інформації, що реалізує критерій виявлення, і містить N-1 блоків пам'яті, в яких фіксується інформація про кожне з останніх N-1 зондувань, де N - число імпульсів в пачці сигналів, що виявляються, а також вирішувальний блок, який складається з N-входового суматора і схеми порівняння. (Див.: Клюев Н.Ф. Обнаружение импульсных сигналов с помощью накопителей дискретного действия. - М.: Сов. Радио, 1963). Такий пристрій високоефективно виявляє слабкі сигнали за рахунок обробки сигналів, що квантовані на багато рівнів. Недоліком такого пристрою є великий об'єм пам'яті та складність реалізації N-входового суматора багаторозрядних кодів, особливо при великих значеннях N. Ще одним недоліком пристрою є зменшення вірогідності правильного виявлення цілей у випадку, коли радіальна швидкість цілі невідома, а це трапляється у більшості випадків, тому що блок накопичення виконує некогерентне накопичення сигналів. В основу винаходу поставлена задача підвищення вірогідності правильного виявлення цілі у випадках відсутності інформації про радіальну швидкість цілі. Зазначена задача вирішується тим, що в пристрої критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті, а також вирішувальний блок, який складається із входового суматора і схеми порівняння, згідно з винаходом, він містить блок синхронізації з чотирма виходами, блок обнуління, вхід якого з'єднаний з першим виходом блоку синхронізації, блок обробки, тактовий вхід якого з'єднаний з третім виходом блока синхронізації, ланцюжки з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключені до четвертого виходу блока синхронізації, m+1 входи вирішувального блоку з'єднані, відповідно, зі входом першого блоку пам'яті та з виходами кожного блоку пам'яті, вихід вирішувального блоку є ви ходом пристрою. Крім того, він містить n допплерівських фільтрів з об'єднаними між собою входами, що є входом пристрою, n-1 додаткових блоків обробки та блок відбору, інформаційні входи всіх блоків обробки підключені до виходів відповідних допплерівських фільтрів, об'єднані входи обнуління і об'єднані тактові входи допплерівських фільтрів підключені, відповідно, до виходу блоку обнуління та до другого виходу синхронізатора, інформаційні виходи блоків обробки з'єднані зі входами блоку відбору, а вихід блоку відбору підключений до входу першого блоку пам'яті, кожен допплерівський фільтр з'єднаний з блоком обробки є каналом когерентного накопичення. Суть винаходу пояснюється блок-схемою запропонованого пристрою, поданою на кресленні (фігура). Запропонований пристрій містить блок синхронізації 1 з чотирма виходами, блок обнуління 2, вхід якого з'єднаний з першим виходом блока синхронізації 1, блок обробки 3, та n-1 додаткових блоків обробки 4, тактові входи 5 яких з'єднані з третім виходом блоку синхронізації 1, ланцюжок із m послідовно з'єднаних між собою блоків пам'яті 6 з об'єднаними тактовими входами 7, які підключені до четвертого виходу блоку синхронізації 1, а також вирішувальний блок 8 з m+1 входами 9, з'єднаними, відповідно, зі входом 10 першого і виходами 11 кожного з m блоків пам'яті 6. Вихід вирішувального блоку 8 є виходом 12 пристрою. Пристрій також містить n допплерівських фільтрів 13 з об'єднаними між собою входами, що є входом 14 пристрою, інформаційні входи 15 блоку обробки 3 та n-1 додаткових блоків обробки 4 з'єднані з виходами відповідних допплерівських фільтрів 13, а виходи всі х блоків обробки (3, 4) підключені до п входів 16 блоку відбору 17, вихід якого у свою чергу з'єднаний зі входом 10 першого блоку пам'яті 6. Об'єднані між собою входи обнуління 18 допплерівських фільтрів 13 підключені до виходублока обнуління 2, а об'єднані поміж собою тактові входи 19 допплерівських фільтрів 13 підключені до другого ви ходу блоку синхронізації 1. Запропонований пристрій працює наступним чином. Радіолокаційна інформація у вигляді kрозрядного коду надходить на об'єднані входи 14 допплерівських фільтрів 13 протягом n зондувань, когерентно обробляється в них і у вигляді 1розрядного коду з виходів допплерівських фільтрів 13 надходить на входи відповідних блоків обробки 3 чи 4, де відбувається обробка результатів когерентного накопичення (фільтрації), на підставі якої приймається рішення про наявність і величину сигналу когерентного накопичення. Результат обробки в кожному елементі дальності в кожному допплерівському каналі у вигляді 1-розрядного коду надходить на відповідний вхід 16 блоку відбору 17. Блок відбору 17 за заданим критерієм відбору, наприклад, за максимальним відношенням сигнал/завада чи за найбільшою амплітудою накопиченого сигналу, видає на вхід 10 першого блоку пам'яті 6 1-розрядний код одного з каналів когерентного накопичення. Одночасно з цим на входи обнуління 18 допплерівських фільтрів 13 з виходу блоку обнуління 2 надходить команда, за якою відбувається стирання інформації в допплерівських фільтрах 13. Така обробка повторюється кожні n зондувань, тому цикл роботи наступних складових частин пристрою, а саме, - блоків пам'яті 6 та вирішувального блоку 8 по відношенню до вхідної інформації пристрою сповільнюється в п разів. Це дозволяє значно скоротити об'єм пам’яті, а похибка визначення азимутальної координати відповідає D = n × Db / 2, де Db - кутове азимутальне переміщення антени за період одного зондування. 2 37866 З ви ходів 11 блоків пам’яті 6, а також зі входу першого блоку пам’яті 6 інформація надходить на входи 9 вирішувального блоку 8, де приймається остаточне рішення про наявність цілі в кожному елементі дальності, і вихід 12 вирішувального блоку 8 є ви ходом пристрою. Таким чином, з допомогою допплерівських фільтрів проводиться когерентне накопичення сигналів навіть для випадків, коли радіальна швид кість цілі невідома, в кожному каналі когерентного накопичення відбувається обробка сигналів з метою попереднього виявлення цілей, а з допомогою блоку відбору проводиться за допомогою вибраного критерію відбір сигналу одного з когерентних каналів, що підвищує вірогідність правильного виявлення цілі у випадках відсутності інформації про радіальну швидкість цілі. Фіг. 3 37866 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for processing radar information according to a specified criterion
Автори англійськоюMyroshnychenko Mykhailo Ivanovych, Tomachynskyi Mykola Tymofiiovych, KUKOLNITSKYI ANATOLII PYLYPOVYCH, Kononovych Viktor Yakovych, Kopnov Mykhailo Oleksandrovych, Mai Ihor Dmytrovych, Nemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych
Назва патенту російськоюУстройство для обработки радиолокационной информации в соответствии с заданным критерием
Автори російськоюМирошниченко Михаил Иванович, Томачинский Николай Тимофеевич, КУКОЛЬНИЦКИЙ АНАТОЛИЙ ФИЛИППОВИЧ, Кононович Виктор Яковлевич, Копнов Михаил Александрович, Май Игорь Дмитриевич, Немчин Александр Федорович, Мокеев Юрий Геннадьевич
МПК / Мітки
МПК: G01S 13/526, G01S 7/40, G01S 13/00
Мітки: обробки, критерійної, пристрій, радіолокаційної, інформації
Код посилання
<a href="https://ua.patents.su/4-37866-pristrijj-kriterijjno-obrobki-radiolokacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій критерійної обробки радіолокаційної інформації</a>
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: Немчин Олександр Федорович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Мирошниченко Михайло Іванович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, МАЙ ІГОР ДМИТРОВИЧ, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович
МПК: G01S 13/00, G01S 13/42, G01S 13/526
Мітки: радіолокаційної, обробки, пристрій, інформації, сигналів
Формула / Реферат:
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки,...
Пристрій обробки радіолокаційної інформації
Номер патенту: 39461
Опубліковано: 15.06.2001
Автори: Немчин Олександр Федорович, Мокеєв Юрій Геннадійович
МПК: G01S 13/00, G01S 13/56
Мітки: обробки, інформації, радіолокаційної, пристрій
Формула / Реферат:
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплеровських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплеровський фільтр, вхід якого є входом доплерівського фільтрового каналу, q-входову схему АБО та бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, який ваідрізняється тим, що кожний доплеровський канал містить блок визначення рівня шуму та лінію затримки, об'єднані...
Пристрій обробки інформації
Номер патенту: 38733
Опубліковано: 15.05.2001
Автор: Чумаченко Ігор Володимирович
МПК: G06F 17/11, G06F 7/48
Мітки: пристрій, інформації, обробки
Текст:
...виходи четвертого операційного блоку 6 з'єднані з другою групою входів третього мультиплексора 12, виходи якого з'єднані з першою групою входів др угого м ультиплексора 11, виходи другого мультиплексора 11 з'єднані з шиною результату 2. Всі елементи, що входять до складу пристрою є відомими елементами автоматики і обчислювальної техніки і можуть бути виконані за будь-якою відомою схемою. Працює пристрій обробки інформації таким чином....
Перетворювач аналогового сигналу радіолокаційної станції в цифровий
Номер патенту: 672
Опубліковано: 16.10.2000
Автори: Садовий Ігор Леонідович, Кравченко Олександр Іванович, Пілюгін Сергій Вікторович
МПК: H03M 1/12, G06F 1/04, G06F 3/05, G06F 1/16, G06F 5/06, H05K 1/02
Мітки: сигналу, аналогового, цифровий, радіолокаційної, станції, перетворювач
Формула / Реферат:
1. Перетворювач аналогового сигналу радіолокаційної станції в цифровий, який включає процесорний блок та вузол нормалізації сигналу, який відрізняється тим, що вузол нормалізації сигналів від двох радіолокаційних станцій одного поста виконано в вигляді п'яти друкованих плат таким чином, що перша друкована плата призначена для нормалізації сигналів кута повороту антени радіолокаційної станції і має три входи та один вихід, друга друкована...
Система обробки інформації
Номер патенту: 37904
Опубліковано: 16.12.2002
Автори: Рудник Анатолій Андрійович, Карп Ігор Миколайович, Яценко Олег Володимирович, Немчин Олександр Федорович, П'ятничко Олександр Іванович, Юревич Михайло Тадейович, Соболевський Сергій Миронович, Рибчин Ілля Йосипович, Панікарська Ольга Іванівна, Бугай Юрій Миколайович
МПК: G06F 11/16, G06F 9/40, H05K 10/00
Мітки: система, інформації, обробки
Формула / Реферат:
Система обробки інформації, що містить схему послідовного зв'язку, сполучену з об'єктом управління, яка відрізняється тим, що вона оснащена логічним контролером, що містить процесор управління, багатоканальну схему дискретного вводу, багатоканальну схему дискретного виводу, багатоканальну схему аналогового вводу, багатоканальну схему аналогового виводу та загальну схему послідовного зв'язку, входи-виходи яких сполучені загальною шиною,...
Попередній патент: Пристрій обробки сигналів радіолокаційної інформації
Наступний патент: Пристрій обробки радіолокаційної інформації
Випадковий патент: Спосіб захисту водооборотних систем від корозії та солевідкладення