Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: Попов Олег Якович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, Каспирович Олександр Геннадійович, Луханін Михайло Іванович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович

Формула / Реферат
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока віднімання є виходом пристрою, який відрізняється тим, що пристрій додатково містить блок обчислення коефіцієнтів кореляції, основну і додаткову лінії затримки коефіцієнтів кореляції, регістр затримки коефіцієнтів кореляції, блок вибору максимуму, основну і додаткову лінії затримки вагових коефіцієнтів, регістр затримки вагових коефіцієнтів, а також комутатор.
2. Пристрій за п. 1, який відрізняється тим, що основний і додатковий входи схеми обчислення коефіцієнтів кореляції підключені до відповідних входів пристрою, а вихід підключений до входу послідовно сполучених основної лінії затримки коефіцієнтів кореляції, регістра затримки коефіцієнтів кореляції і додаткової лінії затримки коефіцієнтів кореляції, 1, 2...n відводи основної лінії затримки коефіцієнтів кореляції приєднані до відповідних 1, 2... n основних входів блока вибору максимуму, а 1, 2...n відводи додаткової лінії затримки коефіцієнтів кореляції підключені до відповідних 1, 2...n додаткових входів блока вибору максимуму, вихід блока вибору максимуму підключений до керуючого входу комутатора, вихід якого підключений до другого входу блока множення, основні 1, 2...n входи комутатора сполучені з відповідними відводами 1,2...n основної лінії затримки вагових коефіцієнтів, а 1, 2...n додаткові входи комутатора сполучені з відповідними 1, 2...n відводами додаткової лінії затримки вагового коефіцієнта.
3. Пристрій за п. 2, який відрізняється тим, що до входів ліній затримки основного та додаткового каналів підключені виходи комутаторів, до входів яких через блоки пам'яті підключені виходи 1, 2...n фільтрів; сполучені входи яких є входами пристрою.
4. Пристрій за п. 1, який відрізняється тим, що вхід послідовно сполучених основної лінії затримки вагових коефіцієнтів регістра затримки вагових коефіцієнтів і додаткової лінії затримки вагових коефіцієнтів підключений до виходу блока обчислення вагових коефіцієнтів.
Текст
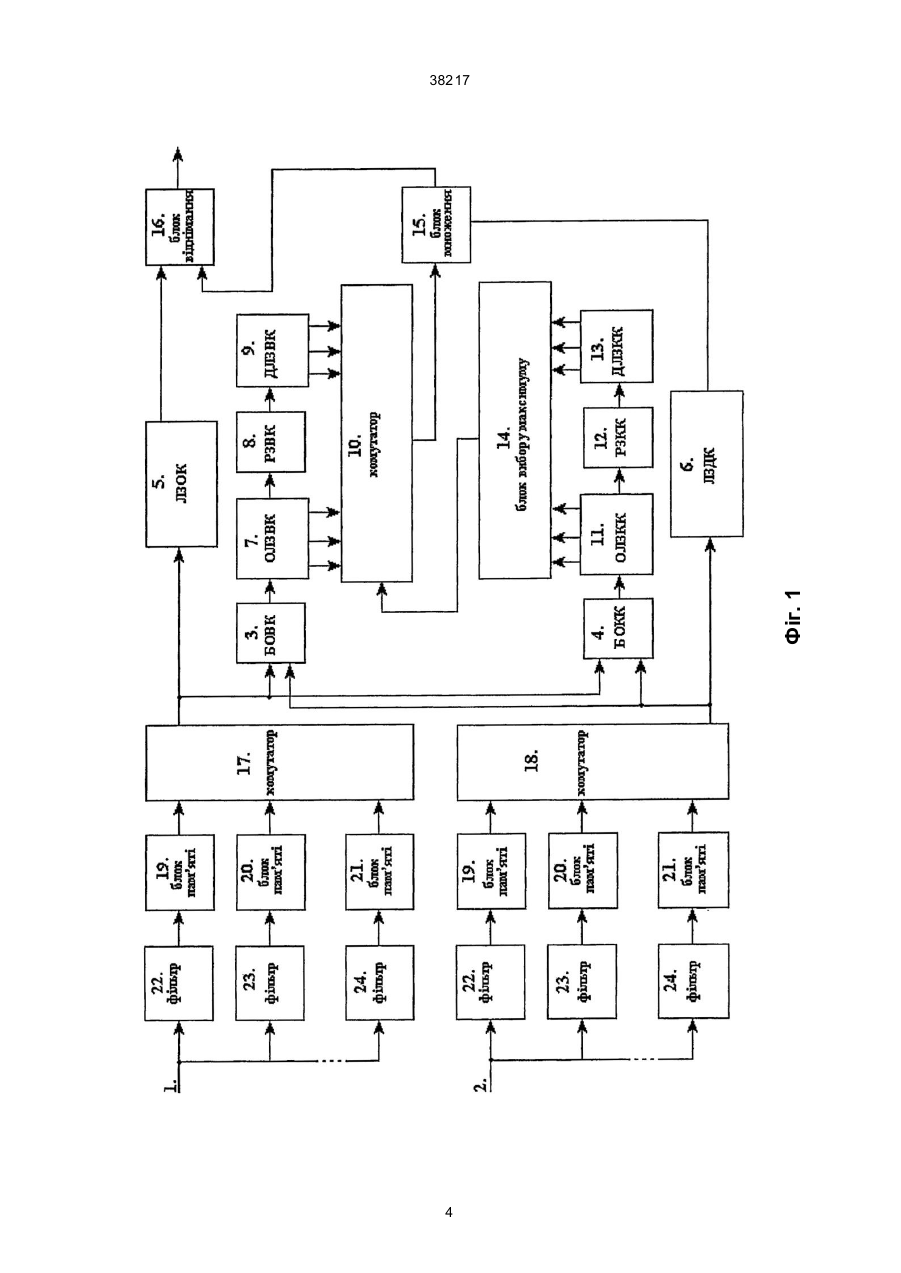
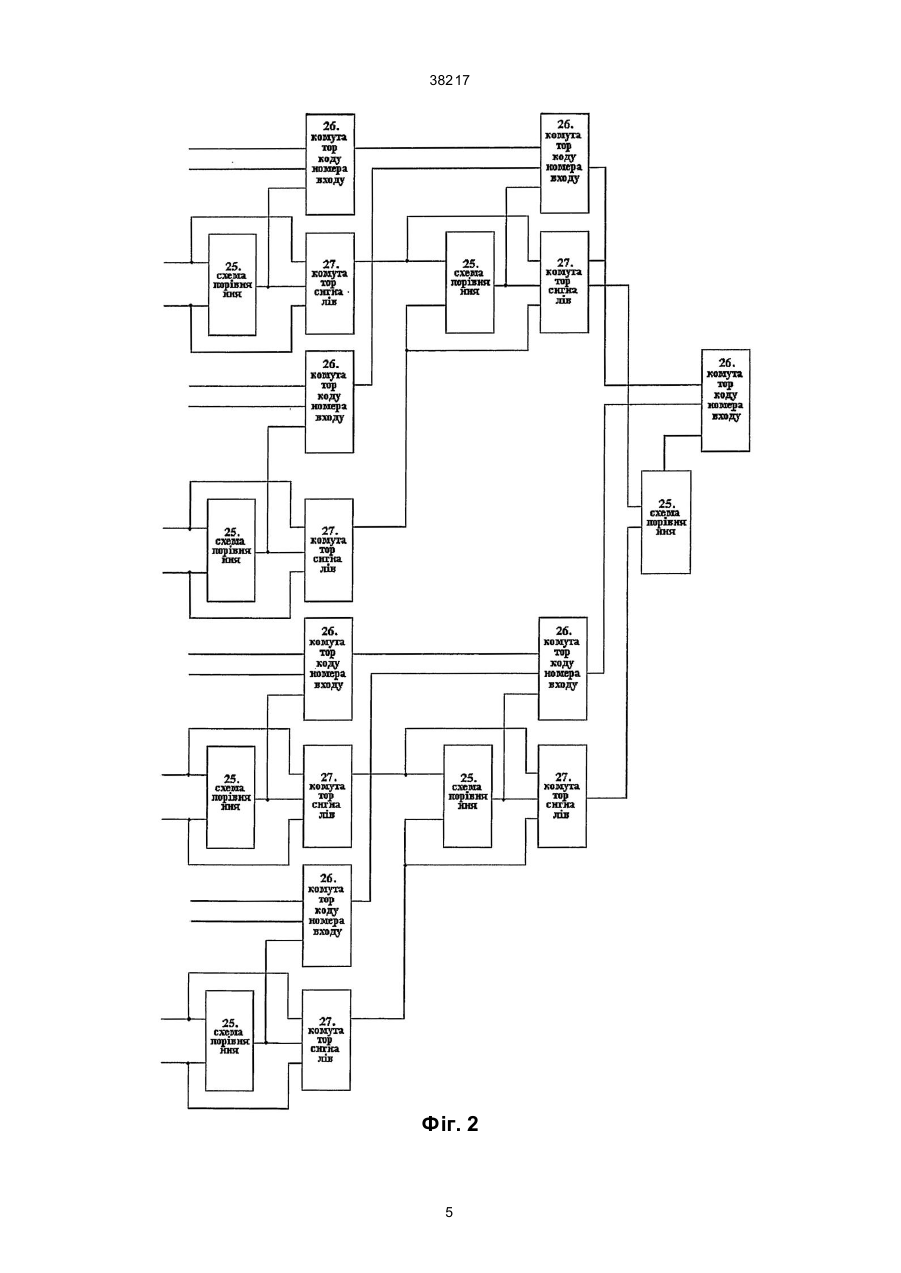
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока віднімання є виходом пристрою, який відрізняє ться тим, що пристрій додатково містить блок обчислення коефіцієнтів кореляції, основну і додаткову лінії затримки коефіцієнтів кореляції, регістр затримки коефіцієнтів кореляції, блок вибору максимуму, основну і додаткову лінії затримки вагових коефіцієнтів, регістр затримки вагових коефіцієнтів, а також комутатор. 2. Пристрій за п. 1, який відрізняється тим, що основний і додатковий входи схеми обчислення A (54) ПРИСТРІЙ КОМП ЕНСАЦІЇ АКТИВНИХ ШУМОВИХ ЗАВАД 38217 Причинами, що перешкоджають досягненню очікуваного технічного результату в пристрої компенсації шумових завад, є недостатньо висока ефективність компенсації при впливові сигналів дискретних завад і сигналів від цілей, а також погіршення компенсації активних завад при наявності пасивних завад. У основу винаходу поставлена задача в пристрої компенсації шумових завад, шляхом запровадження додаткових схемних елементів і зміни зв'язків між ними, домогтися підвищення ефективності компенсації активних шумових завад в умовах наявності сигналів від дискретних завад і від цілей за рахунок виключення впливу цих сигналів на обчислення вагових коефіцієнтів для компенсації, а також поліпшити компенсацію активних завад при наявності пасивних завад. Зазначена задача вирішується тим, що пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполученій із входом блока віднімання, перший вхід блока віднімання підключений до виходу лінії затримки основного каналу, а ви хід блока віднімання є виходом пристрою, згідно з винаходом, додатково містить блок обчислення коефіцієнтів кореляції, основну і додаткову лінії затримки коефіцієнтів кореляції, регістр затримки коефіцієнтів кореляції, блок вибору максимуму, основну і додаткову лінії затримки вагових коефіцієнтів, регістр затримки вагових коефіцієнтів, а також комутатор. Першою додатковою відмінністю є те, що основний і додатковий входи схеми обчислення коефіцієнтів кореляції підключені до відповідних входів пристрою, а вихід підключений до входу послідовно сполучених основної лінії затримки коефіцієнтів кореляції, регістра затримки коефіцієнтів кореляції і додаткової лінії затримки коефіцієнтів кореляції, 1, 2, ..., n відводи основної лінії затримки коефіцієнтів кореляції приєднані до відповідних 1, 2, ..., n основних входів блока вибору максимуму, а 1, 2, ..., n відводи додаткової лінії затримки коефіцієнтів кореляції підключені до відповідних 1, 2, ..., n додаткових входів блока вибору максимуму. Вихід блока вибору максимуму підключений до керуючого входу комутатора, вихід якого підключений до другого входу блока множення. Основні 1, 2, ..., n входи комутатора сполучені з відповідними відводами 1, 2, ..., n основної лінії затримки вагових коефіцієнтів, а 1, 2, ..., n додаткові входи комутатора сполучені з відповідними 1, 2, ..., n відводами додаткової лінії затримки вагового коефіцієнта. Другою додатковою відмінністю є те, що до входів ліній затримки основного та додаткового каналів підключені виходи комутаторів, до входів яких через блоки пам'я ті підключені виходи 1, 2, ..., n фільтрів, сполучені входи яких є входами пристрою. Третьою додатковою відмінністю є те, що вхід послідовно сполучених основної лінії затримки вагових коефіцієнтів регістра затримки вагових кое фіцієнтів і додаткової лінії затримки вагових коефіцієнтів підключений до виходу блока обчислення вагових коефіцієнтів. Суть винаходу пояснюється кресленнями, де на фіг. 1 наведена структурна схема запропонованого пристрою; на фіг. 2 відображена структурна схема блока обчислення максимуму. Пристрій за винаходом (фіг. 1) містить основний і додатковий входи 1 і 2; блок обчислення вагових коефіцієнтів (БОВК) 3 з одним виходом, основним та додатковим входами; блок обчислення коефіцієнтів кореляції (БОКК) 4, що містить вихід, основний і додатковий входи; лінії затримки основного і додаткового каналів (ЛЗОК і ЛЗДК) 5 і 6; основну і додаткову лінії затримки вагових коефіцієнтів (ОЛЗВК і ДЛЗВК) 7 і 9, кожна з входом, виходом та n виводами; регістр затримки вагових коефіцієнтів (РЗВК) 8; комутатор 10, що містить n основних, n додаткових входів, керуючі вхід і вихід; основну і додаткову лінії затримки коефіцієнтів кореляті (ОЛЗКК і ДЛЗКК) 11 і 13, кожна з яких містить вхід, ви хід і n відводів; регістр затримки коефіцієнтів кореляції (РЗКК) 12; блок вибору максимуму (БВМ) 14, що містить n лопаткових входів і вихід; блок множення 15; блок віднімання 16. До входів ліній затримки 5 та 6 основного та додаткового каналів підключені виходи комутаторів 17 та 18, до входів яких через 1, 2, ..., n блоків пам'яті 19, 20 та 21 підключені виходи 1, 2, ..., n фільтрів 22, 23 та 24, сполучені входи яких є входами пристрою. При цьому вихід комутатора 17 підключений до входу ЛЗОК 5 і до основних входів БОВК 3 і БОКК 4, а вихід комутатора 18 підключений до входу ЛЗДК 6 і додаткових входів БОВК 3 і БОКК 4. Вихід БОВК 3 підключений до входу послідовно сполучених ОЛЗВК 1, РЗВ 8 і ДЛЗВК 9, при цьому 1, 2, ..., n відводи ОЛЗВК 7 підключені до відповідних 1, 2, ..., n основних входів комутатора 10; відводи 1, 2, ..., n ДЛЗВК 9 приєднані до відповідних 1, 2, ..., n додаткових входів комутатора 10. Вихід БОВК 4 підключений до входу послідовно сполучених ОЛЗКК 11, РЗК 12 і ДЛЗКК 13, 1, 2, ..., n відводи ОЛЗКК 7 приєднані до відповідних 1, 2, ..., n основних входів БВМ 14, 1, 2, ..., n відводи ДЛЗКК 13 підключені до відповідних 1, 2, ..., n додаткових входів БВМ 14. Вихід БВМ 14 підключений до керуючого входу комутатора 10, вихід якого приєднаний до другого входу блока множення 15. Перший вхід блока множення 15 сполучений із виходом ЛЗДК 6, а вихід блока множення 15 приєднаний до другого входу блока віднімання 16, перший вхід якого сполучений з виходом ЛЗОК 5, а вихід є виходом пристрою. На основний вхід 1 пристрою надходять у цифровому вигляді сигнали квадратурних складових, що містять інформацію про цілі, пасивні та активні завади, прийняті основною антеною. На додатковий вхід 2 пристрою надходять у цифровому вигляді сигнали квадратурних складових, що містять інформацію про цілі, пасивні та активні завади, прийняті додатковою антеною. Прийнята інформація через фільтри 22-24, комутатори 17 або 18 надходить, відповідно, на основний і додатковий входи БОВК 3. Обчислення вагового коефіцієнта в блоці 3 відбувається на інтервалі з m дискретів дальності, наприклад, методом ковзного вікна. 2 38217 Значення вагових коефіцієнтів із виходу БОВК 3 надходять на вхід послідовно сполучених ОЛЗВК 7, РЗВ 8 і ДЛЗВК 9. Затримка між відводами ОЛЗВК 7 і ДЛЗВК 9 складає m дискретів дальності і дорівнює інтервалові усереднення за дальністю оцінки величини вагового коефіцієнта. Затримка РЗВК 8 складає L дискретів дальності. Величина L вибирається з умови виключення сигналу в аналізованій вибірці з оцінки величини вагового коефіцієнта. Паралельно розрахункам вагового коефіцієнта відбувається розрахунок коефіцієнта кореляції в блоці БОКК 4, на основний і додатковий входи якого надходять сигнали, відповідно, з основного і додаткового входів 1 і 2 пристрою. Значення коефіцієнтів кореляції з виходу БОКК 4 надходять на вхід послідовно сполучених ОЛЗКК 11, РЗК 1 та ДЛЗКК 13. Затримка між відводами ОЛЗКК 11 і ДЛЗКК 13 складає m дискретів дальності і дорівнює інтервалові усереднення по дальності оцінки величини коефіцієнта кореляції (r і). Затримка РЗКК 12 складає L дискретів дальності. Це дозволяє виключити сигнал в аналізованій вибірці з оцінки величини коефіцієнта кореляції. Значення коефіцієнтів кореляції з 1, 2, ..., n відводів ОЛЗКК 11 і ДЛЗКК 13 надходять на відповідні 1, 2, ..., n основні і 1, 2, ..., n додаткові входи блока вибору максимуму БВМ 14. У БВМ 14 аналізується 2n значень коефіцієнтів кореляції. Оскільки наявність у будь-якому оцінюваному інтервалі, із m дискретів дальності, сигналів від цілей або дискретних завад веде до зменшення величини коефіцієнта кореляції, то оцінюваному інтервалу, який зазнав найменшого впливу від сигналів, відмінних від шумових завад, наприклад, сигналів від цілей і дискретних завад, відповідає максимальний коефіцієнт кореляції. Аналіз у БВМ 14 відбувається за сигналами, що надходить на 1, 2, ..., n основні і 1, 2, ..., n додаткові входи. У результаті аналізу на виході БВМ 14 формується код позиційного номера того входу БВМ 14, на якому є присутнім максимальний сигнал, тобто максимальне значення коефіцієнта кореляції. Варіант побудови блока вибору максимуму 14 для n=4 наведений на фіг. 2. Блок вибору максимуму для n=4 складається з трьох груп. Перша група включає чотири схеми порівняння 25, чотири комутатори коду номера входу 26 і чотири комутатори сигналів 27. Друга група містить дві схеми порівняння 25, два комутатори коду номера входу 26 і два комутатори сигналів 27. Третя група містить схему порівняння 25 і комутатор коду номера входу 26. Пристрій працює наступним чином. На входи комутаторів коду номерів входів 26 першої групи надходять коди номера входів, сигнали яких аналізуються на відповідних схемах порівняння 25. Кожна схема порівняння 25 виконує порівняння величини сигналів двох коефіцієнтів кореляції і видає керуючий сигнал на комутатор номера входу 26 і комутатор сигналів 27. Комутатор сигналів 27 пропускає на вхід код коефіцієнта кореляції більшої величини, а комутатор номера входу - код номера відповідного входу. Аналогічно відбувається вибір у другій групі. У третій групі вибувається порівняння максимальних сигналів, вибраних серед сигналів на 1...4 основних входах і сигналів на 1...4 додаткових входах, обраних у першій і другій гр упах. З входів пристрою сигнали основного і додаткового каналів надходять на входи 1, 2, ..., n фільтрів 22-24, далі на входи 1, 2, ..., n блоків пам'яті 19, 20 та 21. З ви ходів зазначених блоків пам'яті сигнали надходять на комутатори 17 та 18 основного та додаткового каналів. Скомутовані сигнали надходять з виходів 1 та 2 на входи ліній затримки 5 та 6 основного та додаткового каналів і затримуються на час вибору оптимального вагового коефіцієнта, рівного (n·m)-L/2 дискретам дальності. Затримка на (n·m) дискретів вибувається в ЛЗВК 7 і ЛЗКК 11, а затримка на L/2 дискретів - в РЗВК 8 і РЗКК 12. Сформований код із виходу БВМ 14 надходить на керуючий вхід комутатора 10, у результаті чого на вихід комутатора 10 проходить сигнал з того ж входу, на якому був присутній максимальний сигнал у БВМ 14. Сигнал на виході комутатора 10 несе інформацію про найбільш точний ваговий коефіцієнт, розрахований по оцінюваному інтервалі, який зазнав найменшого впливу сигналів від цілей і дискретних завад. Сигнал додаткового каналу, що надходить із ЛЗДК 6, умножається в блоці множення 15 на ваговий коефіцієнт, вироблений для даного дискрета дальності: Uдоді·Kopti, де Uдоді і Koptі - комплексний сигнал із додаткового входу і комплексне оптимальне значення вагового коефіцієнта, відповідно, і результат надходить на другий вхід блока віднімання 16. На перший вхід блока віднімання 16 надходить сигнал основного каналу з ви ходу ЛЗОК 5. Результат: Uосн і- Uдоді·Kopti, де Uосні - комплексний сигнал з основного входу - надходить на вихід пристрою. Таким чином, запропоноване технічне рішення дозволяє підвищити ефективність компенсації активних шумових завад в умовах впливу дискретних завад і при наявності сигналів від цілей, а також поліпшити компенсацію активних завад при наявності пасивних завад. 3 Фіг. 1 38217 4 38217 Фіг. 2 5 38217 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for compensation of active noise disturbances
Автори англійськоюPopov Oleh Yakovych, Kaspyrovych Oleksandr Hennadiiovych, Lukhanin Mykhalo Ivanovych, Kononovych Viktor Yakovych, Kopnov Mykhailo Oleksandrovych, Lavrentiev Volodymyr Mykolaiovych, Nemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych
Назва патенту російськоюУстройство компенсации активных шумовых помех
Автори російськоюПопов Олег Яковлевич, Каспирович Александр Геннадиевич, Луханин Михаил Иванович, Кононович Виктор Яковлевич, Копнов Михаил Александрович, Лаврентьев Владимир Николаевич, Немчин Александр Федорович, Мокеев Юрий Геннадьевич
МПК / Мітки
МПК: G01S 7/36
Мітки: активних, пристрій, компенсації, шумових, завад
Код посилання
<a href="https://ua.patents.su/6-38217-pristrijj-kompensaci-aktivnikh-shumovikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації активних шумових завад</a>
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: радіолокатор, відніманням, завад, пристроєм, компенсації
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Спосіб компенсації завад лінійного чотириполюсника і пристрій для його здійснення
Номер патенту: 22888
Опубліковано: 05.05.1998
Автор: Макаренко Олександр Сергійович
МПК: H04B 1/10
Мітки: чотириполюсника, пристрій, спосіб, завад, здійснення, лінійного, компенсації
Формула / Реферат:
1. Способ компенсации помех линейного четырехполюсника, согласно которому формируют основной канал, реагирующий на смесь сигнала и помехи, и компенсационный канал, реагирующий только на помеху, устанавливают одинаковые интенсивности и противоположные фазы помех в каналах, суммируют полученные колебания, отличающийся тем, что при формировании каналов осуществляют выборки из смеси сигнала и помехи и отдельно помехи с частотой, определяемой...
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Кудрик Андрій Миколайович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: пристроєм, компенсації, радіолокатор, завад
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Спосіб радіозаглушення радіоканалів з шумоподібними сигналами та програмною перестройкою робочих частот і пристрій створення активних завад таким каналам
Номер патенту: 22244
Опубліковано: 15.02.2001
Автори: Ядрошніков Володимир Олександрович, Ватулін Ігор Федорович, Качанов Олександр Іванович
МПК: H04K 3/00
Мітки: активних, таким, частот, спосіб, робочих, радіозаглушення, радіоканалів, програмною, завад, шумоподібними, створення, пристрій, сигналами, перестройкою, каналам
Формула / Реферат:
1. Способ радиоподавления радиоканалов с шумоподобными сигналами и программной перестройкой рабочих частот основанный на приеме сигналов подавляемых средств (объектов подавления), формировании и излучении радиосигналов, отличающийся тем, что при приеме определяют нижнюю fH и верхнюю fB частотные границы помехового сигнала, количество элементов Nc в сигналах и длительность элемента t, затем полосу помехового сигнала разделяют на L полос с...
Пристрій для ділення або множення n-розрядних чисел
Номер патенту: 35015
Опубліковано: 15.03.2001
Автори: Лега Юрій Григорійович, Шеховцов Борис Анатолійович, Лукашенко Андрій Германович, Лукашенко Валентина Максимівна
МПК: G06F 7/527, G06F 7/52
Мітки: n-розрядних, чисел, ділення, множення, пристрій
Формула / Реферат:
Пристрій для ділення або множення n-розрядних чисел, що вміщує n-розрядні регістри співмножників. виходи регістрів співмножників згрунтовані по к-розрядів (к - розрядність множника і множеного; (к<n) і підключені до інформаційних входів комутаторів груп розрядів множника і множеного відповідно, керуючі входи якого підключені відповідно до першого та другого керуючих входів пристрою керування, а виходи підключені відповідно до входів...
Попередній патент: Пристрій автоматичного контролю вмісту корисного компоненту в мінеральній сировині
Наступний патент: Щогла вітроагрегату
Випадковий патент: Спосіб хроматографічного визначення фталатів