Пристрій для визначення координат джерела акустичної емісії
Номер патенту: 41138
Опубліковано: 15.08.2001
Автори: Ковтун Ігор Іванович, Прохоренко Сергій Вікторович, Горошко Андрій Володимирович, Ройзман Вілен Петрович

Формула / Реферат
Пристрій для визначення координат джерела акустичної емісії триангуляційним акусто-емісійним (АЕ) методом, що містить чотири приймально - підсилювальних канали, кожен із яких складається з послідовно з'єднаних п'єзопсрстворювача (АЕ - датчика), попереднього підсилювача та підсилювача фільтрів, виходи якого з'єднано з входами формувача осциляцій і подій, формувача пікових значень амплітуди і блоком лінійних координат, які, в свою чергу, підключені до персонального комп'ютера, який відрізняється тим, що як основні субблоки прийому та обробки сигналів АЕ використані субблоки двох АЕ-реєстраторів (АФ - 15), для забезпечення безперервної передачі даних від АФ - 15 до комп'ютера у субблоках лінійних координат контакти вихідного з'єднувача підключені до виходу вбудованого обчислювального пристрою через узгоджуючі транзистори без залучення вбудованого оперативного запам'ятовуючого пристрою, контакти вихідного цифрового з'єднувача субблоків амплітуд АФ -15 напряму з'єднані з контактами запам'ятовуючого регістра сигнал генератора тактових імпульсів субблоків суматора застосований як запит на п'яте системне переривання процесора комп'ютера для запису сигналів подій і осциляцій, сигнал керування субблока, лінійних координат застосований як третє системне переривання процесора для запису сигналів амплітуд і лінійних координат, сигнали від субблоків надходять у персональний комп'ютер за допомогою створених програмованих інтерфейсів цифрового вводу РІО-48,з створеним програмним забезпеченням збору та обробки даних, автоматичним враховуванням швидкості поширення хвиль в обчисленні координат АЕ - джерела.
Текст
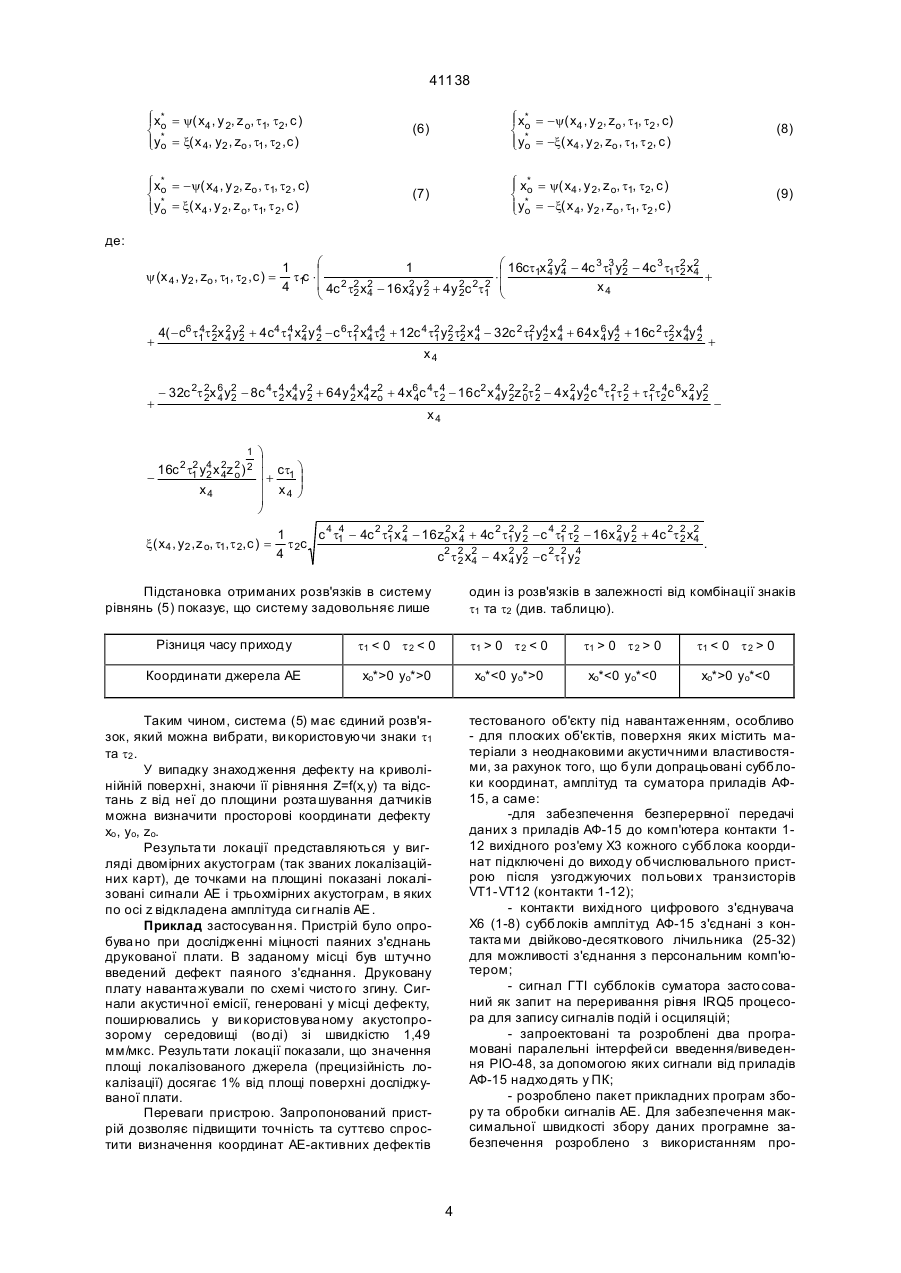
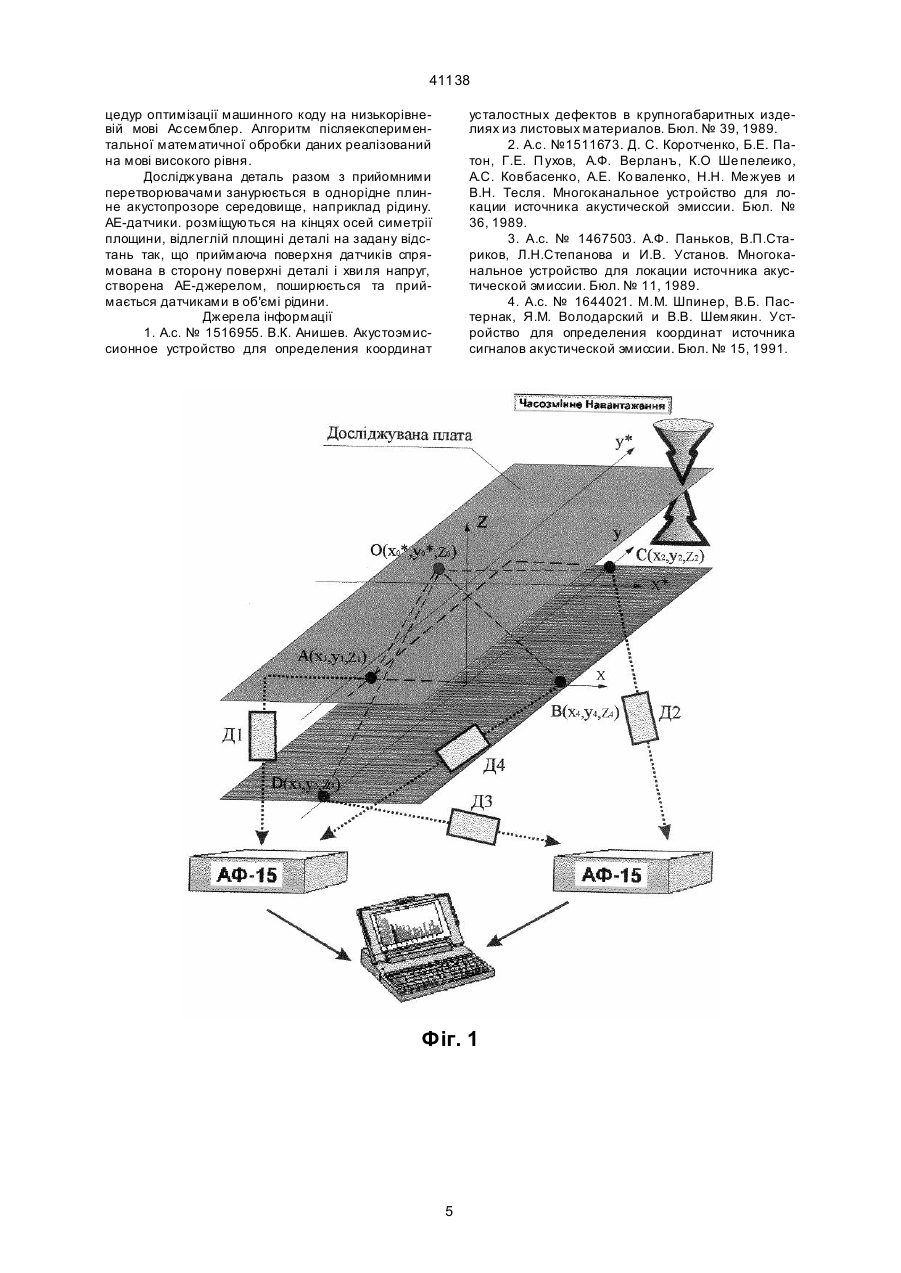
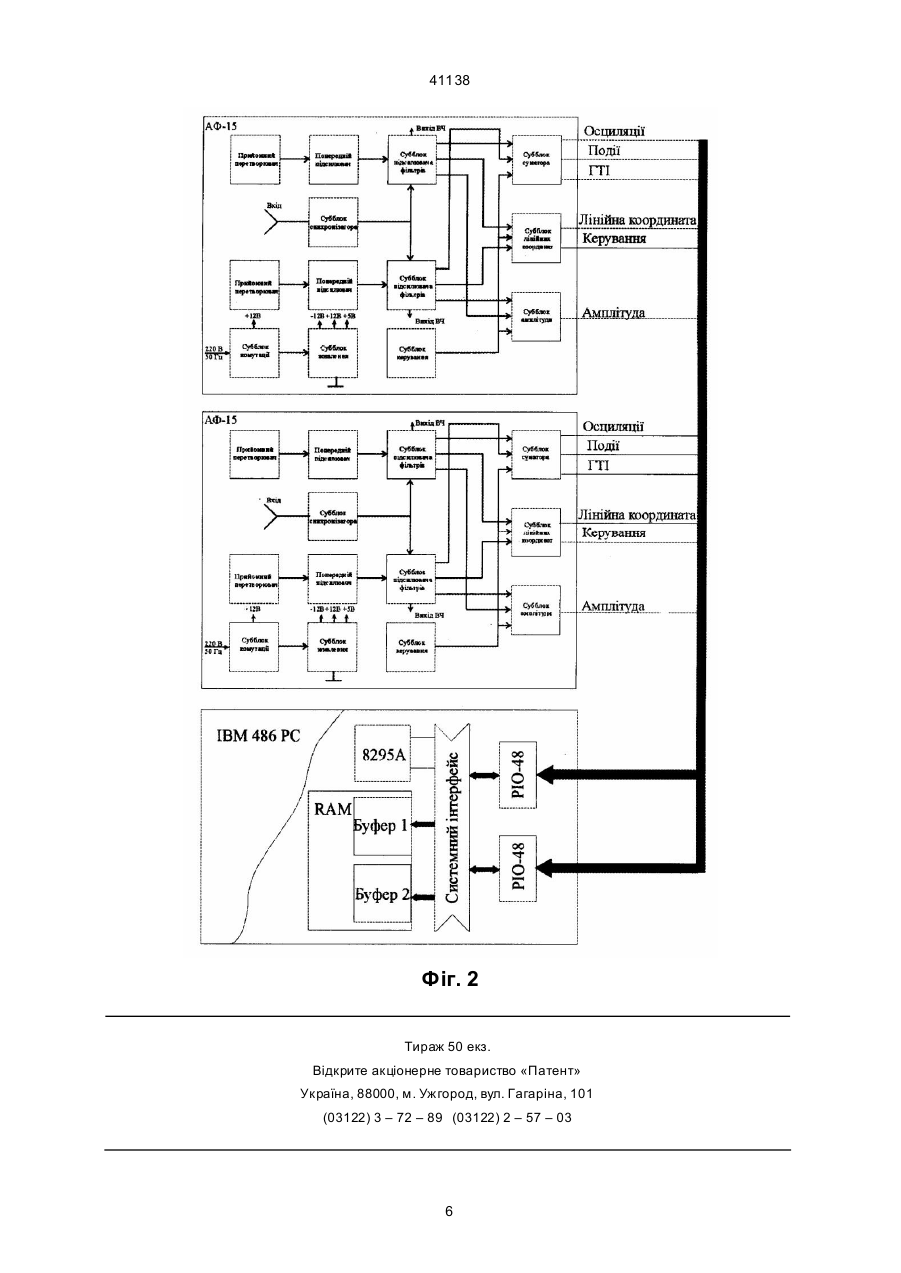
Пристрій для визначення координат джерела акустичної емісії триангуляційним акусто-емісійним (АЕ) методом, що містить чотири приймально підсилювальні канали, кожен із яких складається з послідовно з'єднаних п'єзоперетворювача (АЕ датчика), попереднього підсилювача та підсилювача фільтрів, ви ходи якого з'єднано з входами формувача осциляцій і подій, формувача пікових значень амплітуди і блоком лінійних координат, які, в свою чергу, підключені до персонального комп'ютера, який відрізняється тим, що як основні субблоки прийому та обробки сигналів АЕ використані субблоки двох АЕ-реєстраторів (АФ 15), для забезпечення безперервної передачі даних від АФ - 15 до комп'ютера у субблоках лінійних координат контакти вихідного з'єднувача підключені до виходу вбудованого обчислювального пристрою через узгоджуючі транзистори без залучення вбудованого оперативного запам'ятовуючого пристрою, контакти вихідного цифрового з'єднувача субблоків амплітуд АФ -15 напряму з'єднані з контактами запам'ятовуючого регістра сигнал генератора тактових імпульсів субблоків суматора застосований як запит на п'я те системне переривання процесора комп'ютера для запису сигналів подій і осциляцій, сигнал керування субблока, лінійних координат застосований як третє системне переривання процесора для запису сигналів амплітуд і лінійних координат, сигнали від субблоків надходять у персональний комп'ютер за допомогою створених програмованих інтерфейсів цифрового вводу РІО-48, з створеним програмним забезпеченням збору та обробки даних, автоматичним враховуванням швидкості поширення хвиль в обчисленні координат АЕ - джерела. (19) (21) 2001031425 (22) 01.03.2001 (24) 15.08.2001 (46) 15.08.2001, Бюл. № 7, 2001 р. (72) Ройзман Вілен Петрович, Ковтун Ігор Іванович, Горошко Андрій Володимирович, Прохоренко Сергій Вікторович (73) ТЕХНОЛОГІЧНИЙ УНІВЕРСИТЕТ ПОДІЛЛЯ А (54) ПРИСТРІЙ ДЛЯ ВИЗНАЧЕННЯ КООРДИНАТ ДЖЕРЕЛА АКУСТИЧНОЇ ЕМІСІЇ 41138 далі, але і від місця розташування давачів, що значно ускладнює процес визначення центру хвилі, а врахуван ня середньої швидкості поширення акустичних хвиль в матеріалі не дає бажаної точності локації дефектів. Ме тою запропонованого винаходу є вдосконалення двох АЕ-реєстраторів АФ-15 для безперервної передачі даних до персонального комп'ютера (ПК), автоматичне врахування швидкості поширення хвиль при обчисленні координат АЕ-джерела, принципове спрощення та підвищення точності виз начення координат дефектів в деталях, поверхня яких містить матеріали з неоднаковими акустичними характеристиками. Для досягнення поставленої задачі давачі розташовуються на осях симетрії прямокутної площини, відлеглій площині деталі на задану відстань так, що приймаюча поверхня давачів спрямована в сторону поверхні деталі і хвиля напруг, створена АЕ-джерелом, поширюється та приймається давачами в об'ємі акусто прозорого плинного середовища, в якості основних блоків прийому використані допрацьовані субблоки двох акусто-емісійних приладів АФ-15, цифрові виходи їх субблоків амплітуд, лінійних координат та суматора з'єднані з двома програмованими паралельними інтерфейсами введення/виведення РІО-48, що під'єднані до системного інтерфейсу персонального комп'ютера типу IBM PC/XT/AT, а сигнали КЕРУВАННЯ субблоків лінійних координат та сигнал генератора тактових імпульсів субблока суматора під'єднані до системного інтерфейсу ПК і застосовані як запити на переривання IRQ3, IRQ4 та IRQ5 процесора. Цифрові сигнали від приладів АФ-15 надходять в персональний комп'ютер з допомогою двох модулів цифрового вводу РІО-48 та програмного забезпечення збору даних. Усі лінії цифрового введення/виведення реалізуються через зовнішній 64-контактний типу СНП 58-64, що доступ ний з боку задньої панелі ПК IBM PC/XT/AT. Проведене вдосконалення субблоків координат дає змогу безперервно зчитува ти інформацію, що видається обчислювальними пристроями субблоків, і поміщати її в буферний каскад в оперативній пам'яті (RAM) до наступ ного запису в постійну пам'я ть ПК. Вдосконалення субблоків амплітуд дозволяє безперервно отримува ти інформацію про значення амплітуд усі х сигналів АЕ , зареєстрованих пристроями АФ-15. Ручка налаштування КАЛІБРОВКА ге нератора змінної частоти, частота якого f[МГц]= =cпр/2[мм/мкс], де cпр - швидкість поширення АЕхвиль, встановлюється у крайнє праве положення, що відповідає частоті f = 0,695 [МГц] і швидкості поширення спр = 1,39 [мм/мкс], що дозволяє використати при обрахуванні координат АЕ-джерела дійсне точне значення швидкості поширення АЕхвиль. Згідно винаходу, досліджуваний об'єкт разом з прийомними АЕ-сигнал дефектів, що дозволяє підвищити точність локації та спрощує процес вимірів за рахунок усунення необхідності ура хування часу проходження сигналів АЕ че рез матеріали з неоднаковими акустичними властивостями. В плинному акустопрозорому середовищі, наприклад рідині, затухання повністю визначається пог линанням, оскільки (в межах допуску), розсіяння енергії акустичних хвиль внаслідок відбиття від неоднорідностей середовища відсутнє. Пристрій може бути застосований для плоских та криволінійних поверхонь такої кривизни, щоб пряма, яка з'єднує будь-яку її точку з кожним із датчиків, знаходилась в акустопрозорому середовищі і не перетинала досліджуваний об'єкт. Схема пристрою для визначення координат джерела акустичної емісії в однорідному акустопрозорому середовищі представлена на рис.1. Функціональна схема апаратної частини пристрою показана на рис. 2. Пристрій для визначення координат джерела акустичної емісії складається з двох модифікованих приладів акустоемісійних АФ-15 та ПК IBM PC/XT/AT. Прилад АФ-15 містить два АЕ-датчика, два попередні підсилювача, два субблоки підсилювача фільтрів, субблок суматора, субблок лінійних координат, субблок амплітуд, субблок синхронізатора, субблок керування, субблок живлення та субблок комутації. ПК додатково містить два програмовані паралельні інтерфейси вве дення/виведення РІО-48, підключені до системного інтерфейсу. Для вирішення задачі площинної локації в декартови х координатах ви користовуються дві просторові систе ми координат хуz та х* у* z, зміщені одна відносно другої на відстань Z 0. Чотири датчика розміщуються на осях координат х та у (рис. 1) на кінцях осей симетрії прямокутної площини, ідентичної за формою та розмірами до досліджуваної деталі. Таке розташуван ня датчиків дозволяє значно спростити процес математичної обробки сигналів АЕ. Площина деталі співпадає з координатною площиною х* у*. Координати датчиків відомі. Пристрій працює наступним чином. Сигнали від джерела акустичної емісії (т. О) приймаються групою датчиків A і В для першо го та С і D другого приладу АФ-15, перетворюються в них в електричні сигнали, які підсилюються у попередніх підсилювачах Д1-Д4, фільтруюються в субб локах підсилювача фільтрів приладу АФ-15 і, якщо їх ве личини перевищують рівень дискримінації, фор муються сигнали осциляцій та пікової амплітуди події, рівної максимальній амплітуді осциляцій. Сформовані сигнали подаються на субблоки суматора, лінійних координат та амплітуд. С убблоки координат, на які поступили сигнали подій, попередньо визначають місце положення АЕ-джерела (надалі попередні координати) за різницею часу приходу на відповідні датчики. Попередня координата джерела АЕ відносно першого АЕ-датчика кожного приладу визначається за формулою: x= cпр L ± Dt , 2 2 де Dt - різниця часу приходу сигналу АЕ до датчиків; cпр- швидкість поширення ультразвука, що встановлюється апаратурнo; L - відстань між датчиками. Це здійснюється в такий спосіб. Величина L/2 записується в ре гістрі. Формується імпульс тривалістю Dt і заповнюється імпульсами часто 2 41138 тою f [МГц]=спр/2[мм/мкс], таким чином одержуючи c пр L добуток Dt , що, сумуючись з або віднімаю2 2 чись, в залежності від то го, до якого датчика сигнал прийшов першим, дає попередню координату джерела сигналу АЕ. Субблок координат також визначає істинність події, тобто находження АЕ-джерела в зоні контроля, і дає дозвіл на наступ ну обробку сигналів субб локам суматора і амплітуд. Безперервна передача даних про попередні координати від субб локів координат приладів АФ-15 здійснюється в ПК, для чого контакти 1-12 вихідного з'єднувати ХЗ кожного субблока координат підключені до виходу обчислювального пристрою після узгоджуючих польових транзисторів VT1-VT12 (контакти 1-12). Пікові значення аналогової амплітуди подій подаються на субблок амплітуд , де здійснюється перетворення в цифрову форму для передачі в ПК. Для можливості з'єднання з персональним комп'ютером та забезпечення безперервної передачі контакти вихідного цифрового роз'єму Х6 (1-8) субб локів амплітуд АФ-15 з'єднані з контакта ми двійково-десяткового лічильника (25-32). Субблоки суматора служать для виводу цифрових сигналів осциляцій та подій в ПК. Субблоки лінійних координат, суматора та амплітуд керуються генератором керування. Живлення всіх субблоків пристрою здійснюється від стабілізованих джерел живлення субблоку живлення, керованого субблоком комута ції. Безперервна передача даних до ПК здійснюється за допомогою розробленого пакету прикладних програм збору сигналів АЕ. Для забезпечення максимальної швидкості збору даних програмне забезпечення розроблено з використанням процедур оптимізації машинного коду на низькорівневій мові Ассемблер. По перериваннях IRQ3 та IRQ4 процесора персонального комп'ютера програмовані паралельні інтерфейси вводу зчитують сигнали значень амплітуди (8 біт) і координати (12 біт) подій АЕ. В якості переривань IRQ3 та IRQ4 служать сигнали «Керуван ня» субблоків лінійних координат першого і другого приладів АФ15, які виробляється, коли визначена досто вірність події. По перериванню IRQ5, яким служить імпульс ГТІ, зчитуються сигнали подій (12 біт) та осциляцій (12 біт), для чого здійснено спеціальне програмування контролера переривань 8259А. Всі сигнали записуються в перший буфер оперативної пам'яті (RAM) і у момент заповнення, для того, щоб інформація, яка надхо дить від АФ-15, не втра чалась під час зчитування із буферу в постійну пам'ять ПК, інформація поступає в другий буфер до заповнення, і, коли другий буфер заповниться і почнеться вивід його інформації в постійну пам'ять в масив у вигляді файлових структур, перший буде вже вільним і готовий до прийняття нових да них. Далі програма післяекспериментальної обробки, що реалізована на мові високого рівня, приступає до розпакування файла і, використовуючи значення попередніх координат, за формулою Dt = 2L - X cпр (2) визначає різниці часу приходу (РЧП) t1 та t 2 АЕсигналу на пару датчиків кожного АФ-15, а за знаком РЧП судять, на який із датчиків кожної пари АЕ-сигнал прийшов першим. Попередні координати відіграють роль проміжних величин, необхідних для програмного ура хування РЧП у процесі визначення координат АЕ-джерела. РЧП дають інформацію про різницю відстаней від джерела сигналів АЕ (точка О) до відповідних датчиків (3). ìBO - AO = t1c íCO - DO = t c î 2 (2) Тут t 1 - РЧП сигналів АЕ до датчиків А та В, t2 - РЧП до датчиків С та D, с - швидкість поширення ультразвука у однорідному середовищі. Довжини відрізків АО, ВО, СО і DO в координатах можуть бути ви ражені наступ ним чином. АО 2 =(х1 -хо*)+(у1 -уо*)2 +(z1 - zо) 2 ВО2 =(х4 -хо*)+(у4 -уо*)2 +(z4 - zо) 2 DО2 =(х3 -хо*)+(у3 -уо*)2 +(z3 - zо)2 CО2 =(х2 -хо*)+(у2-уо*)2 +(z2 - zо)2 де хi, уi, zi - де картові координати прийомних перетворювачів (і = 1...4), zо - ві дома відстань площини досліджуваного об'єкта від площини розташування датчиків, хо*, уо* - шукані координати джерела АЕ. Підставивши значення довжин відрізків АО, ВО, СО і DO в (1), отримуємо: ì ( x - x * )2 + (y - y* )2 + (z - z )2 - ( x - x * )2 +( y - y * )2 +( z - z )2 = t c ï 4 o 4 o 4 o 1 o 1 o 1 o 1 í * 2 * 2 2 * 2 * 2 2 ï ( x2 - xo ) + ( y2 - yo ) + (z 2 - zo ) - ( x3 - xo ) + ( y3 - yo ) + (z3 - zo ) = t2c î Внаслідок того, що центр координат вибраний у центрі прямокутника, що співпадає з пло ( 4) щиною ху, х2= х3 = 0, у1 = у4 = 0, z1 = z2 = z3 = z4 = 0, x4 = -x1, у2 =-у3, система рівнянь (4) спрощується: ì ( x - x * )2 +( y* )2 + z 2 - ( x + x * )2 + ( y* )2 + z 2 = t c ï 4 o o o 4 o o o 1 í * 2 * 2 2 * 2 * 2 2 ï ( x o) +( y2 - yo ) + z o - (x o) +( y 2 + y o ) + zo = t 2c î Для знаходження невідомих координат джерела АЕ xо* та yо* потрібно звільнитись від квадратних коренів у рівняннях системи (5), для чого необ ( 4) хідно обидві частини рівнянь два рази піднести у квадрат, в результаті чого отримуємо рівняння четвертої степені і відповідно чотири варіанта розв'я зку: 3 41138 ì o ïx* = y( x4 , y 2, z o, t1, t2, c ) í * ïyo = x( x 4, y2 , zo , t1, t2 , c ) î (6) ì o ïx* = y( x4 , y 2, zo , t1, t2 , c) í * ïyo = x( x4 , y 2, zo , t1, t 2, c ) î (8) ìx* =-y( x4 , y 2, zo , t1, t2 , c) ï o í * ïyo = ( x4 , y 2, z o, t1, t 2, c ) x î (7) ì x* = ( x4 , y 2, z o, t1, t2, c ) ï o y í * ïyo = x( x 4, y2 , zo , t1, t2 , c ) î (9) де: æ 1 1 y (x 4 , y2 , zo , t1, t2 , c ) = t1c × ç 2 2 2 ç 4c t x - 16x2 y 2 + 4y 2c 2t 2 4 2 4 4 2 2 1 è + 4 4 2 2 4( - c6 t1 t 2x 2 y2 + 4c4 t1 x2 y 4 - c 6t1 x4 t4 + 12c 4 t2 y2 t2 x 4 - 32c 2 t1 y4 x 4 + 64x 6 y4 + 16c 2 t2 x 4y 4 2 4 2 4 2 4 2 1 2 2 4 2 4 4 2 2 4 2 + x4 2 2 6 2 + 3 æ 16ct1x 2 y2 - 4c 3 t1 y2 - 4c 3 t1t2 x2 4 4 2 2 4 ×ç + ç x4 è 4 4 4 2 4 4 2 6 4 4 2 4 2 2 2 2 4 4 2 2 2 4 6 2 2 - 32c t 2x 4 y2 - 8 c t 2 x4 y 2 + 64 y 2 x4 zo + 4 x 4c t 2 - 16 c x 4y 2z 0t 2 - 4 x 4 y2 c t1 t 2 + t1 t2 c x 4 y2 x4 1 ö ÷ 2 16c 2 t1 y4 x 2z 2 ) 2 ÷ ct1 ö 2 4 o ÷ + ÷ x4 ÷ x4 ø ÷ ø 4 4 2 2 2 2 2 2 2 2 4 2 2 2 2 2 2 2 1 c t1 - 4c t1 x 4 - 16 zo x 4 + 4c t1 y 2 - c t1 t2 - 16 x 4 y 2 + 4 c t 2 x4 x( x4 , y2 , z o, t1, t 2, c ) = t 2c . 2 2 2 2 2 2 2 4 4 c t 2 x4 - 4 x 4 y2 - c t1 y2 Підстановка отриманих розв'язків в систему рівнянь (5) показує, що систему задовольняє лише один із розв'язків в залежності від комбінації знаків t1 та t2 (див. таблицю). Різниця часу приходу t1 < 0 t 2 0 t 2 0 t 2 > 0 t1 0 Координати джерела АЕ хо*>0 уо*>0 хо*0 хо*
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for coordinates determination of acoustic emission source
Автори англійськоюRoyzman Vilen Petrovych, Kovtun Ihor Ivanovych, Horoshko Andriy Volodymyrovych, Prokhorenko Serhiy Viktorovych
Назва патенту російськоюУстройство для определения координат источника акустической эмиссии
Автори російськоюРойзман Вилен Петрович, Ковтун Игорь Иванович, Горошко Андрей Владимирович, Прохоренко Сергей Викторович
МПК / Мітки
МПК: G01N 29/04
Мітки: джерела, емісії, визначення, акустичної, координат, пристрій
Код посилання
<a href="https://ua.patents.su/6-41138-pristrijj-dlya-viznachennya-koordinat-dzherela-akustichno-emisi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення координат джерела акустичної емісії</a>
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Хом'яков Олег Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: координат, визначення, пеленгатор, несинусоїдального, сигналу, джерела, імпульсного, кутових
Формула / Реферат:
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Датчик сигналів акустичної емісії
Номер патенту: 7250
Опубліковано: 15.09.2000
Автори: Мартинюк Петро Сергійович, Крилов Едуард Самійлович
МПК: G01N 29/04
Мітки: сигналів, датчик, акустичної, емісії
Формула / Реферат:
1. Датчик сигналів акустичної емісїі, що містить пустотілий корпус з розташованими в ньому співосно перетворювачем та стержневим звукопроводом з сферично опуклим торцем, а простір між торцем звукопроводу і площиною перетворювача заповнений звукопровідною рідиною, який відрізняється тим, що звукопровід та перетворювач стикаються між собою, утворюючи локальний контакт площею S ³ 1мм2, яка визначається, виходячи із...
Перетворювач для приймання сигналів акустичної емісії
Номер патенту: 38687
Опубліковано: 15.05.2001
Автор: Філоненко Сергій Федорович
МПК: G01N 29/14, G01N 29/00
Мітки: приймання, перетворювач, сигналів, акустичної, емісії
Формула / Реферат:
(21) 2000084949(54) (57) Дата прийняття рішення 19 лютого 2001р.Перетворювач для приймання сигналів акустичної емісії, що містить порожній корпус, п'єзоелемент, два електроди, один з яких розміщується на неробочій поверхні...
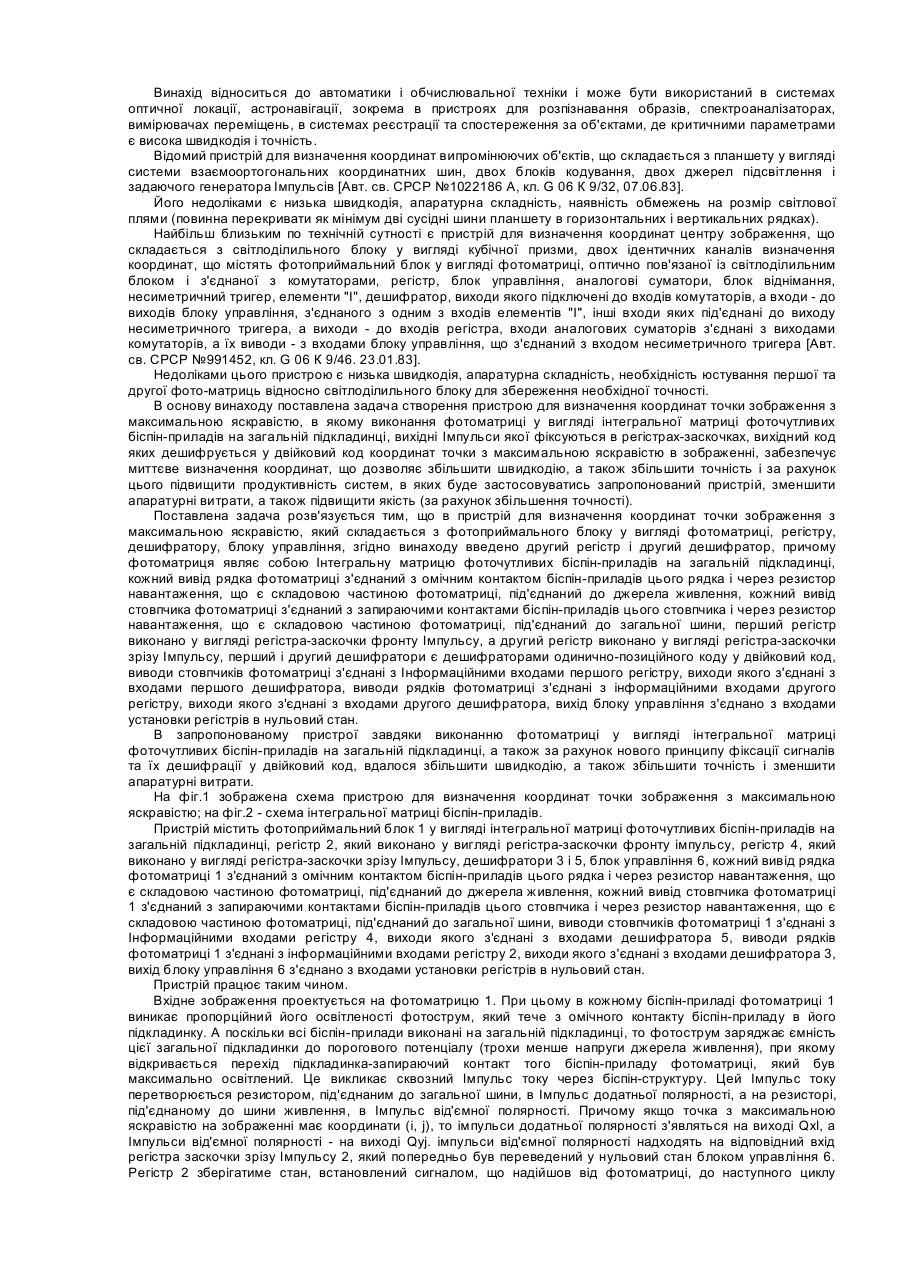
Пристрій для визначення координат точки зображення з максимальною яскравістю
Номер патенту: 22957
Опубліковано: 05.05.1998
Автори: Кожем'яко Володимир Прокопович, Василецький Сергій Анатолійович, Колесницький Олег Костянтинович
МПК: G06K 9/46
Мітки: визначення, координат, максимальною, яскравістю, пристрій, зображення, точки
Формула / Реферат:
Пристрій для визначення координат точки зображення з максимальною яскравістю, що містить фотоприймальний блок, у вигляді фотоматриці, регістр, дешифратор, блок управління, який відрізняється тим, що в нього введено другий регістр і другий дешифратор, причому фотоматриця являє собою Інтегральну матрицю фоточутливих біспін-приладів на загальній підкладинці, кожний вивід рядка фотоматриці з'єднаний з омічним контактом біспін-приладів цього рядка...
Індикатор для визначення координат точок акупунктури
Номер патенту: 37110
Опубліковано: 16.04.2001
Автор: Солянко Володимир Пилипович
МПК: A61H 39/02
Мітки: індикатор, акупунктури, точок, визначення, координат
Формула / Реферат:
1. Індикатор для визначення координат, точок акупунктури, що містить лінійку у вигляді двох паралельних напрямних, розташованих з зазором, і елемент, який встановлено з можливістю пересування по лінійці і оснащений отвором, співпадаючим з віссю лінійки, який відрізняється тим, що елемент виконано у вигляді повзуна з закріпленими на ньому двома додатковими лінійками, перпендикулярними напрямним і оснащеними повзунами з вказівними...
Попередній патент: Напій лікерний “бренді деві”
Наступний патент: Композиція на основі утилізованих гіпсовмісних відходів, спосіб утилізації гіпсовмісних відходів та установка для його здійснення
Випадковий патент: Сигналізатор падіння рівня рідини в свердловині