Ручна лебідка
Номер патенту: 4586
Опубліковано: 28.12.1994
Автори: Панченко Валерій Павлович, Лебедев Олексій Іванович, Зубарев Юрій Володимирович, Красіловський Анатолій Львович

Формула / Реферат
(57) Ручная лебедка, содержащая грузоподъемный орган, связанный с приводной рукояткой передаточным механизмом, включающим в себя тормозной механизм с цилиндрической собачкой, установленной с возможностью контактирования своей скошенной поверхностью зацепления с зубьями храповика и имеющей элементы стабилизации собачки в рабочем положении, отличающаяся тем, что элементы стабилизации собачки выполнены в виде боковых выступов с обеих сторон скошенной поверхности зацепления собачки, захватывающих боковые поверхности зуба храповика.
Текст
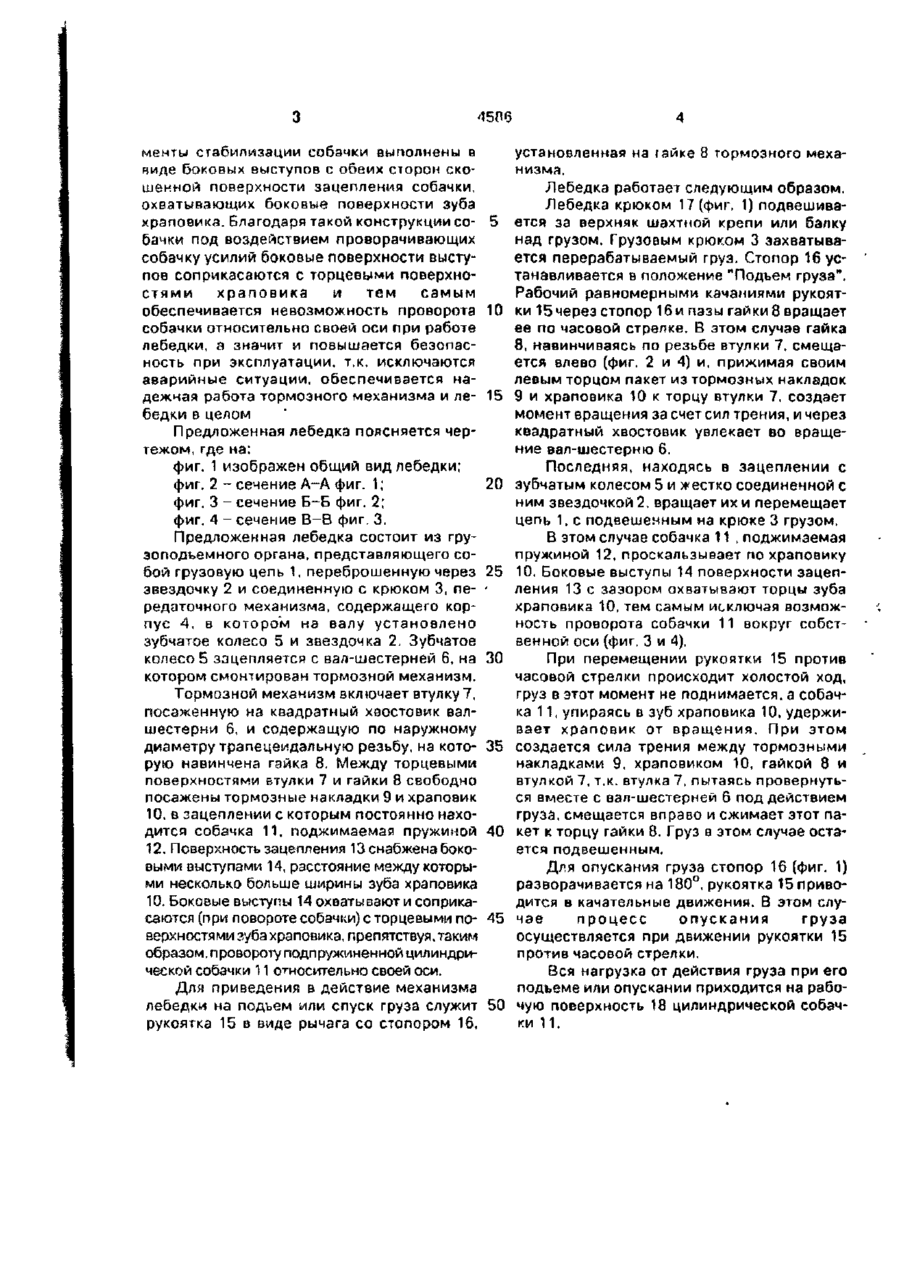
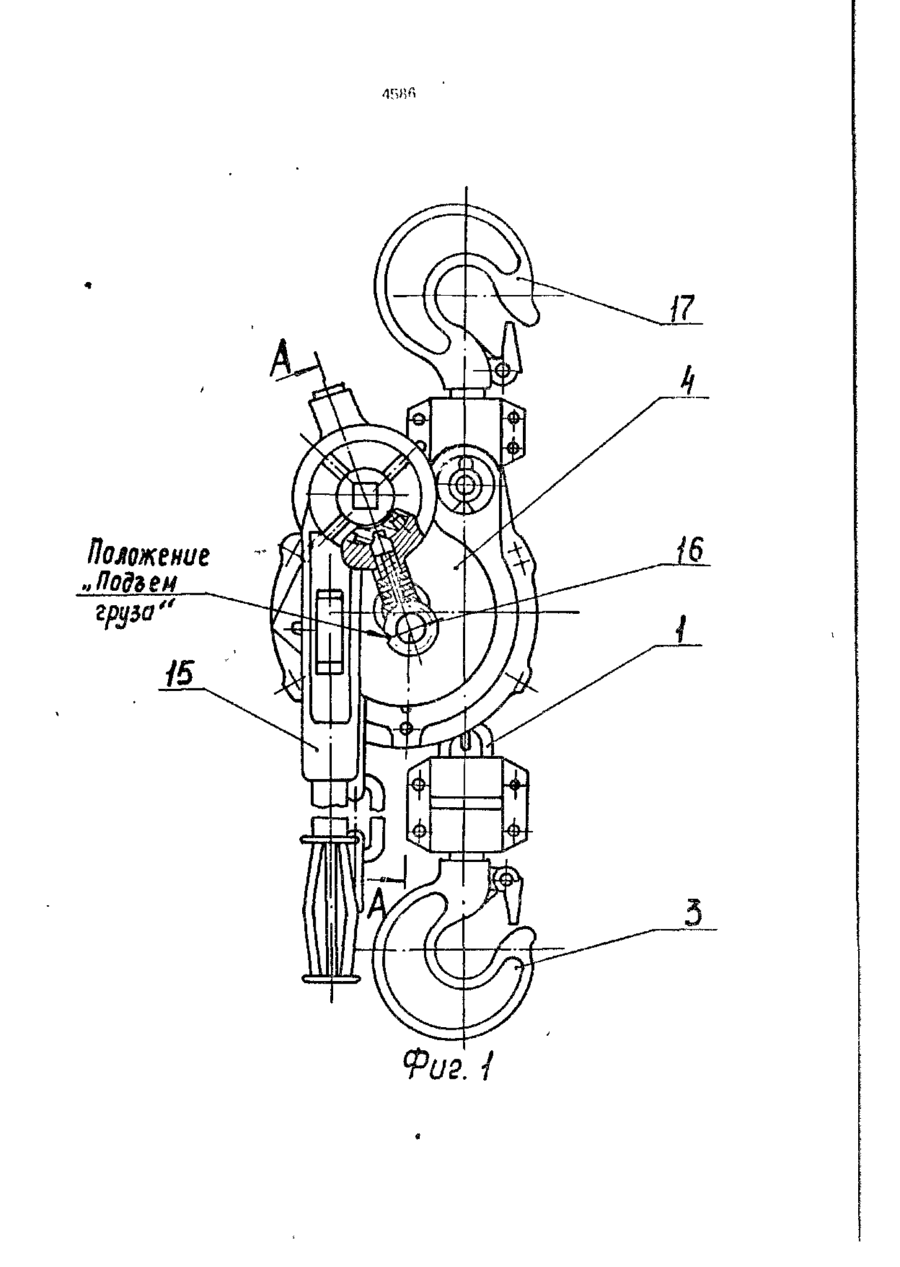
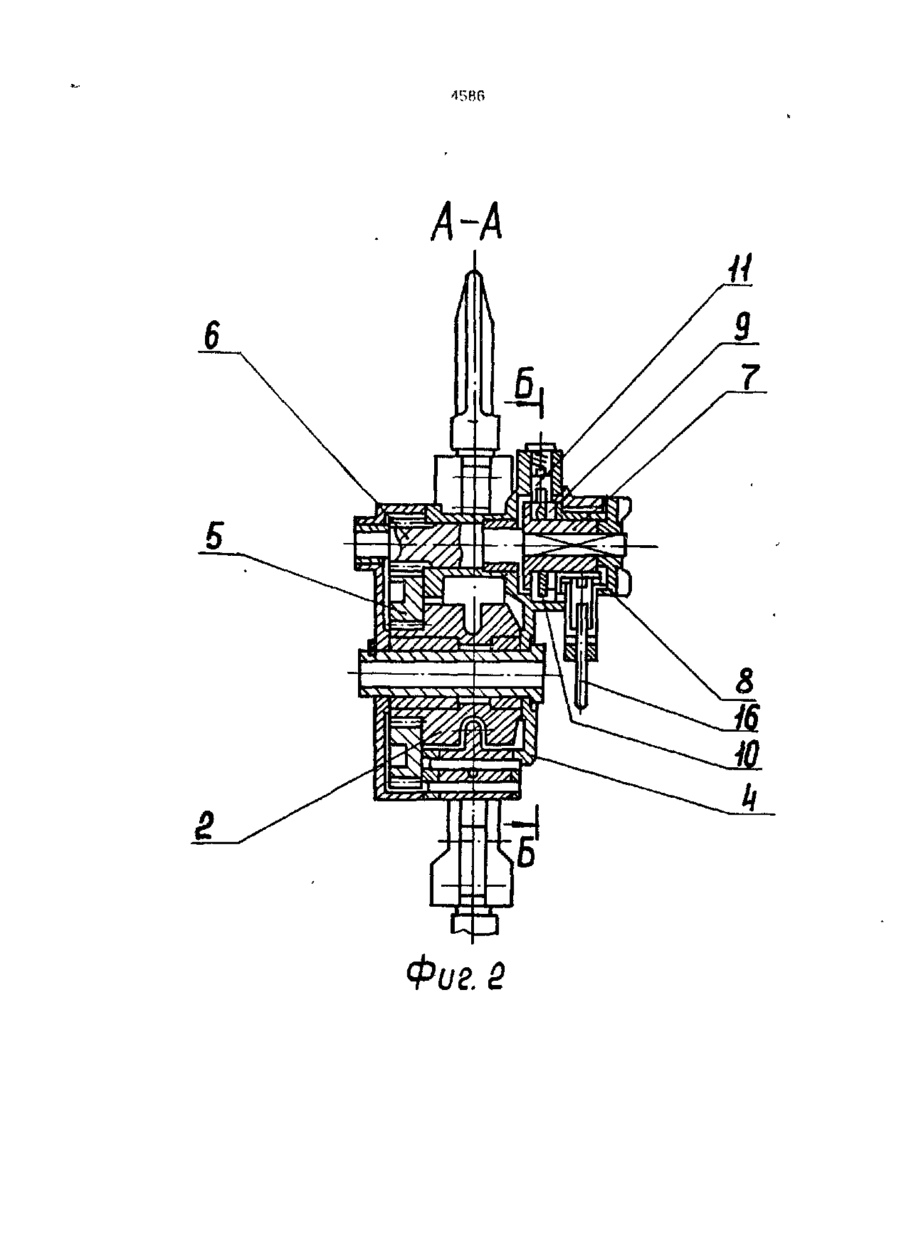
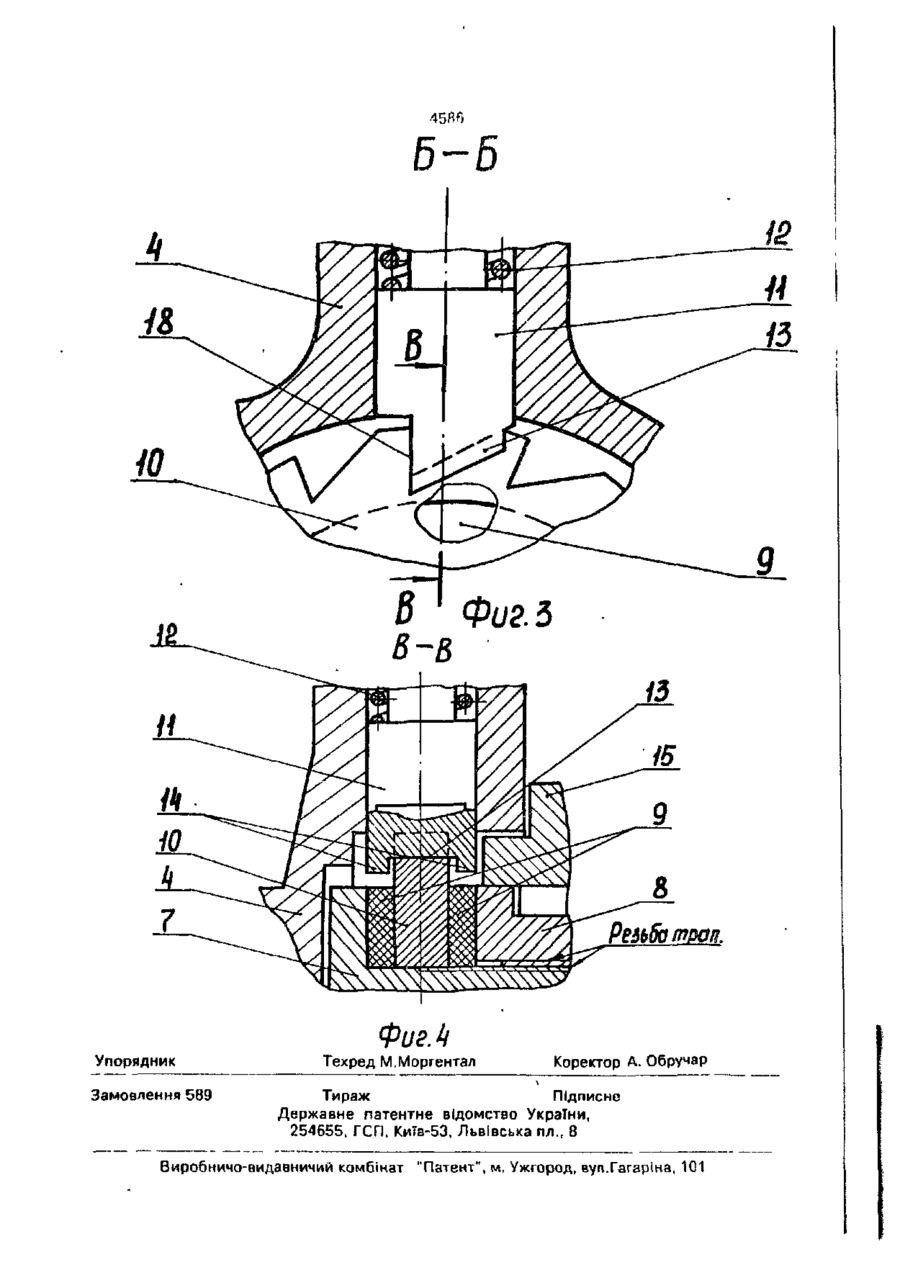
Ручная лебедка, содержащая грузоподъемный орган, связанный с приводной рукояткой передаточным механизмом, включающим в себя тормозной механизм с цилиндрической собачкой, установленной с возможностью контактирования своей скошенной поверхностью зацепления с зубьями храповика и имеющей элементы стабилизации собачки в рабочем положении, о т л и ч а ю щ а я с я тем, что элементы стабилизации собачки выполнены в виде боковых выступов с обеих сторон скошенной поверхности зацепления собачки, охзатывающих боковые поверхности зуба храповика. Предлагаемое изобретение относится к грузоподъемным средствам, в частности к лебедкам с ручным приводом, и может быть использовано в различных отраслях народного хозяйства. В качестве прототипа выбрана ручная лебедка, содержащая грузоподъемный орган, связанный с приводной рукояткой передаточным механизмом, включающим в себя тормозной механизм с цилиндрической собачкой, установленной с возможностью контактирования своей скошенной поверхностью зацепления с зубьями храповика и имеющей элементы стабилизации собачки в рабочем положении [1]. воротов вокруг своей оси и заклинивания с зубьями храпового колеса. В основу изобретения поставлена задача усовершенствовать ручную лебедку путем использования новой геометрической формы поверхности зацепления собачки обладающей свойством слежения с обратной связью, что повышает надежность устройства в целом Поставленная задача решается с помощью ручной лебедки, содержащей грузоподъемный орган, связанный с приводной рукояткой передаточным механизмом, включающим в себя тормозной механизм с цилиндрической собачкой, установленной с возможностью контактирования своей скошенной поверхностью зацепления с зубьями храповика и имеющей элементы стабилизации собачки в рабочем положении, в которой согласно изобретению, эле Недостатком прототипа является сложность конструкции и недостаточная надежность элементов, предохраняющих цилиндрическую собачку от случайных про менты стабилизации собачки выполнены в виде боковых выступов с обеих сторон скошенной поверхности зацепления собачки, охватывающих боковые поверхности зуба храповика. Благодаря такой конструкции со- 5 бачки под воздействием проворачивающих собачку усилий боковые поверхности выступов соприкасаются с торцевыми поверхностями храповика и тем самым обеспечивается невозможность проворота 10 собачки относительно своей оси при работе лебедки, а значит и повышается безопасность при эксплуатации, т.к. исключаются аварийные ситуации, обеспечивается надежная работа тормозного механизма и ле- 15 бедки в целом Предложенная лебедка поясняется чертежом, где на: фиг. 1 изображен общий вид лебедки; фиг. 2 - сечение А-А фиг. 1; 20 фиг. 3 - сечение Б~Б фиг. 2; фиг. 4 - сечение В-В фиг. 3. Предложенная лебедка состоит из грузоподьемного органа, представляющего собой грузовую цепь 1, переброшенную через 25 звездочку 2 и соединенную с крюком 3, пе- ' редаточного механизма, содержащего корпус 4, в котором на валу установлено зубчатое колесо 5 и звездочка 2. Зубчатое колесо 5 зацепляется с вал-шестерней 6. на 30 котором смонтирован тормозной механизм. Тормозной механизм включает втулку 7, посаженную на квадратный хвостовик валшестерни 6, и содержащую по наружному диаметру трапецеидальную резьбу, на кото- 35 рую навинчена гайка 8. Между торцевыми поверхностями втулки 7 и гайки 8 свободно посажены тормозные накладки 9 и храповик 10, в зацеплении с которым постоянно находится собачка 11. поджимаемая пружиной 40 12. Поверхность зацепления 13 снабжена боковыми выступами 14, расстояние между которыми несколько больше ширины зуба храповика 10. Боковые выступы 14 охватывают и соприкасаются (при повороте собачки) с торцевыми по- 45 верхностями зуба храповика, препятствуя, таким образом, провороту подпружиненной цилиндрической собачки 11 относительно своей оси. Для приведения в действие механизма лебедки на подъем или спуск груза служит 50 рукоятка 15 в виде рычага со стопором 16, установленная на іайке 8 тормозного механизма. Лебедка работает следующим образом. Лебедка крюком 17 {фиг. 1) подвешивается за верхняк шахтной крепи или балку над грузом. Грузовым крюком 3 захватывается перерабатываемый груз. Стопор 16 устанавливается в положение "Подъем груза". Рабочий равномерными качаниями рукоятки 15 через стопор 16 и пазы гайки 8 вращает ее по часовой стрелке. В этом случае гайка 8. навинчиваясь по резьбе втулки 7. смещается влево (фиг. 2 и 4) и. прижимая своим левым торцом пакет из тормозных накладок 9 и храповика 10 к торцу втулки 7, создает момент вращения за счет сил трения, и через квадратный хвостовик увлекает во вращение вал-шестерню 6. Последняя, находясь в зацеплении с зубчатым колесом 5 и жестко соединенной с ним звездочкой 2, вращает их и перемещает цепь 1. с подвешенным на крюке 3 грузом. В этом случае собачка 11 , поджимаемая пружиной 12, проскальзывает по храповику 10. Боковые выступы 14 поверхности зацепления 13 с зазором охватывают торцы зуба храповика 10. тем самым исключая возможность проворота собачки 11 вокруг собственной оси (фиг. 3 и 4). При перемещении рукоятки 15 против часовой стрелки происходит холостой ход, груз в этот момент не поднимается, а собачка 11, упираясь в зуб храповика 10. удерживает храповик от вращения. При этом создается сила трения между тормозными накладками 9. храповиком 10, гайкой 8 и втулкой 7, т.к. втулка 7. пытаясь провернуться вместе с вал-шестерней 6 под действием груза, смещается вправо и сжимает этот пакет к торцу гайки 8. Груз в этом случае остается подвешенным. Для опускания груза стопор 16 (фиг. 1) разворачивается на 180°, рукоятка 15 приводится в качательные движения. В этом случае процесс опускания груза осуществляется при движении рукоятки 15 против часовой стрелки. Вся нагрузка от действия груза при его подъеме или опускании приходится на рабочую поверхность 18 цилиндрической собачки 11. їда Положение *t '15 НО Н Фиг. 9. 45ВГ) б-~6 В Фиг з в-в Упорядник Замовлення 589 Фиг. Техред М.Моргентал Коректор А. Обручар Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл.т 8 Виробничо-видавничий комбінат "Патент", м, Ужгород, вуп.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюHand winch
Автори англійськоюZubarev Yurii Volodymyrovych, Krasilovskyi Anatolii Lvovych, Lebedev Oleksii Ivanovych, Panchenko Valerii Pavlovych
Назва патенту російськоюРучная лебедка
Автори російськоюЗубарев Юрий Владимирович, Красиловский Анатолий Львович, Лебедев Алексей Иванович, Панченко Валерий Павлович
МПК / Мітки
МПК: B66D 1/02
Код посилання
<a href="https://ua.patents.su/6-4586-ruchna-lebidka.html" target="_blank" rel="follow" title="База патентів України">Ручна лебідка</a>
Ручна лебідка
Номер патенту: 2223
Опубліковано: 26.12.1994
Автор: Назаров Радій Махмудович
МПК: B66D 1/02
Формула / Реферат:
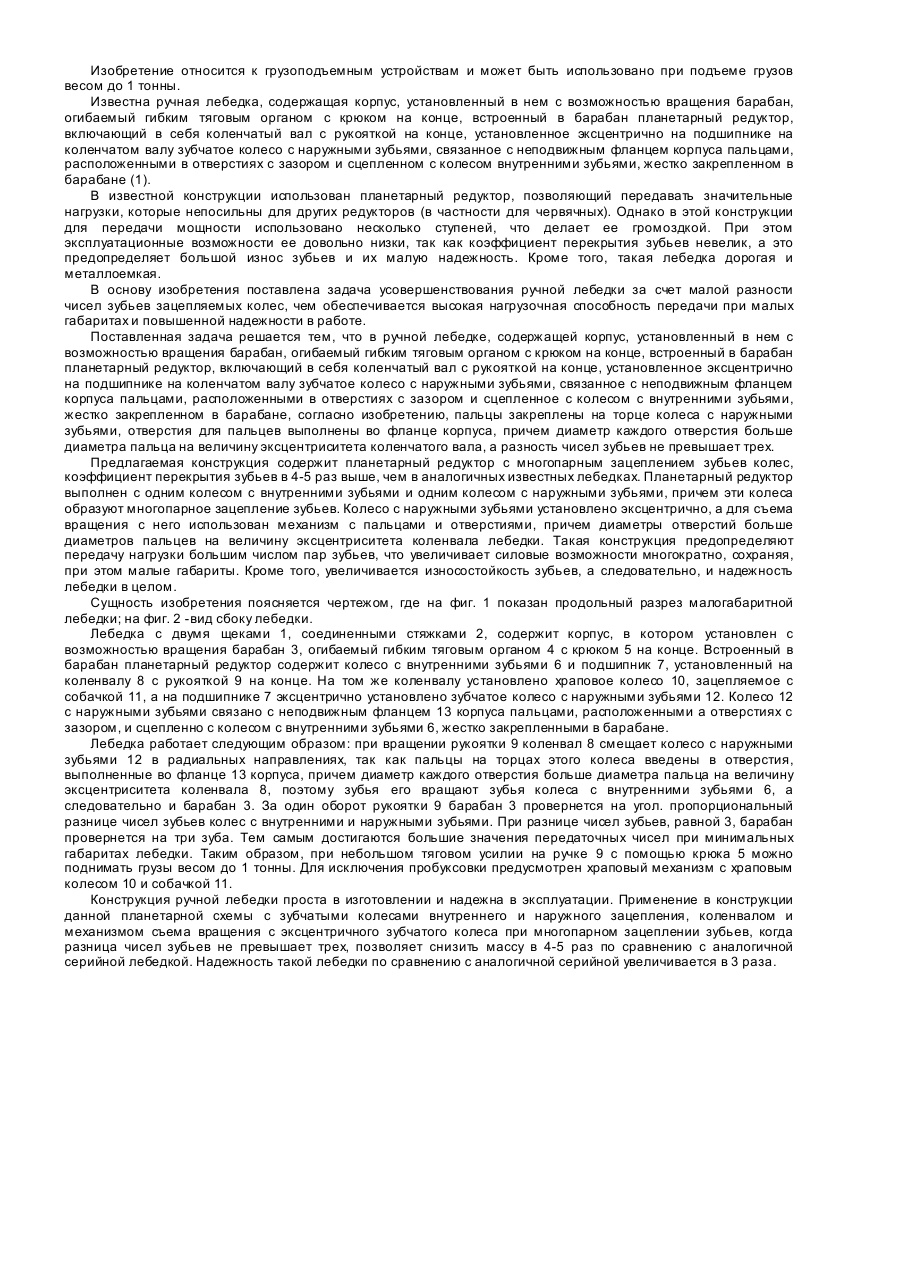
Ручная лебедка, содержащая корпус, установленный в нем с возможностью вращения барабан, огибаемый гибким тяговым органом с крюком на конце, встроенный в барабан планетарный редуктор, включающий в себя коленчатый вал с рукояткой на конце, установленное эксцентрично на подшипнике на коленчатом валу зубчатое колесо с наружными зубьями, связанное с неподвижным фланцем корпуса пальцами, расположенными в отверстиях с зазором, и сцепленное с колесом...
Циліндрічна щітка для очистки поверхонь
Номер патенту: 2519
Опубліковано: 26.12.1994
Автор: Рахманов Микола Миколайович
МПК: A46B 7/00
Мітки: очистки, щітка, поверхонь, циліндрична
Формула / Реферат:
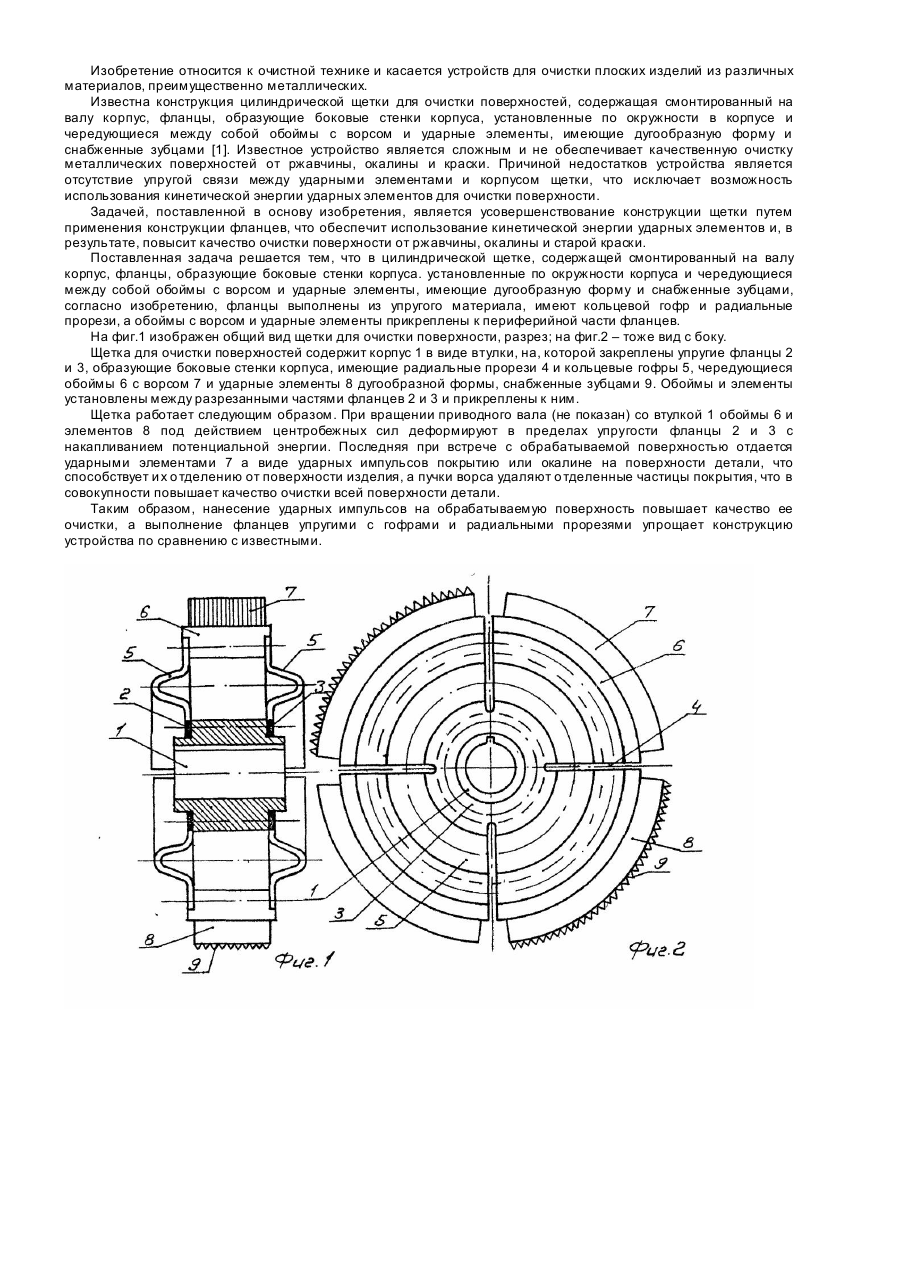
Цилиндрическая щетка для очистки поверхностей, содержащая смонтированный на валу корпус, фланцы, образующие боковые стенки корпуса, установленные по окружности корпуса и чередующиеся между собой обоймы с ворсом и ударные элементы, имеющие дугообразную форму и снабженные зубцами, отличающаяся тем, что фланцы выполнены из упругого материала, имеют кольцевой гофр и радиальные прорези, а обоймы с ворсом и ударные элементы прикреплены к...
Пристрій для кріплення великогабаритних вантажів на платформі транспортного засобу
Номер патенту: 4601
Опубліковано: 28.12.1994
Автори: Шінкарєнко Владімір Ніколаєвіч, Малов Арнольд Дмітрієвіч, Лавренов Борис Миколайович, Завгородній Іван Павлович
МПК: B60P 7/06
Мітки: засобу, платформи, транспортного, кріплення, великогабаритних, вантажів, пристрій
Формула / Реферат:
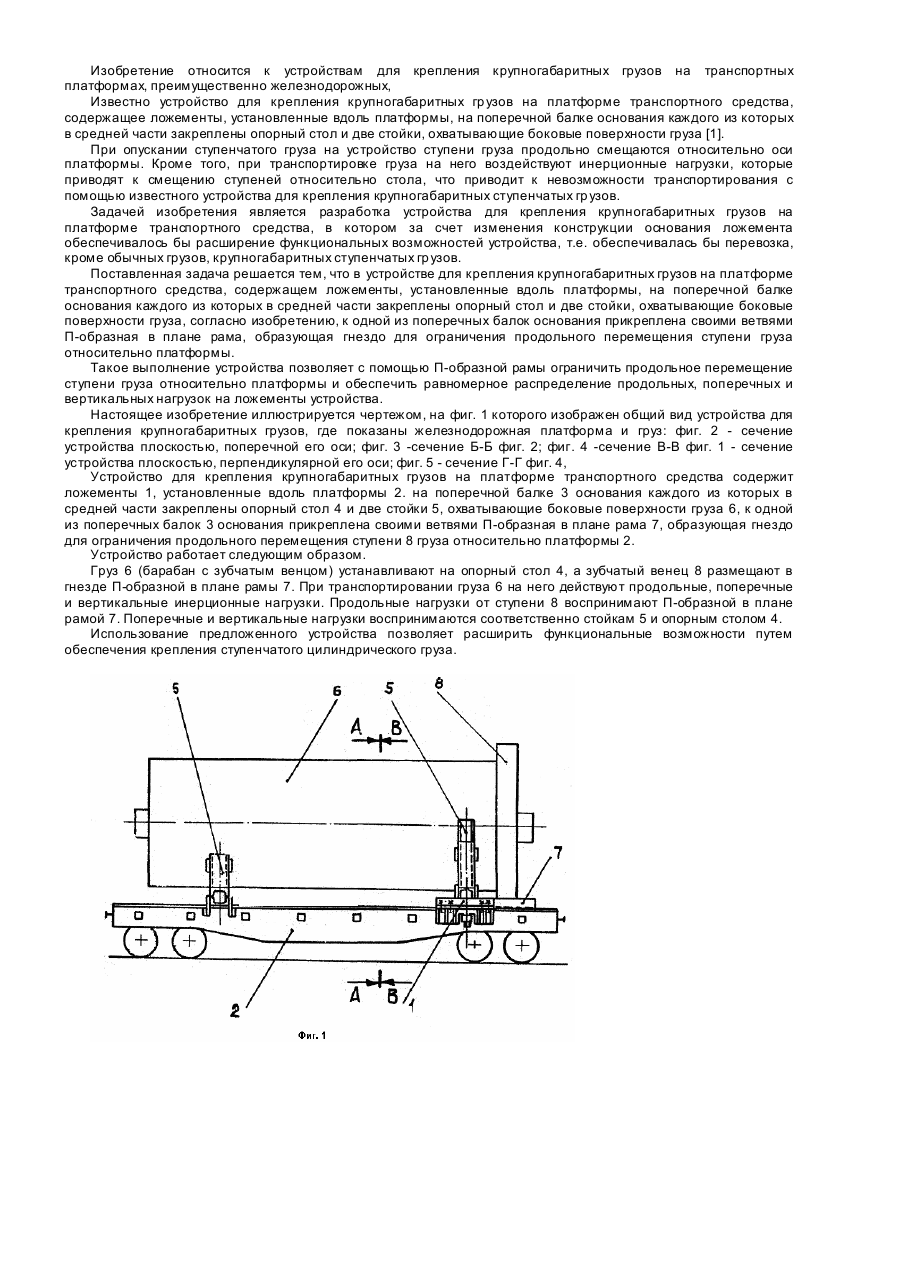
Устройство для крепления крупногабаритных грузов на платформе транспортного средства, содержащее ложементы, установленные вдоль платформы, на поперечной балке основания каждого из которых в средней части закреплены опорный стол и две стойки, охватывающие боковые поверхности груза, отличающееся тем, что к одной из поперечных балок основания прикреплена своими ветвями П-образная в плане рама, образующая гнездо для ограничения продольного...
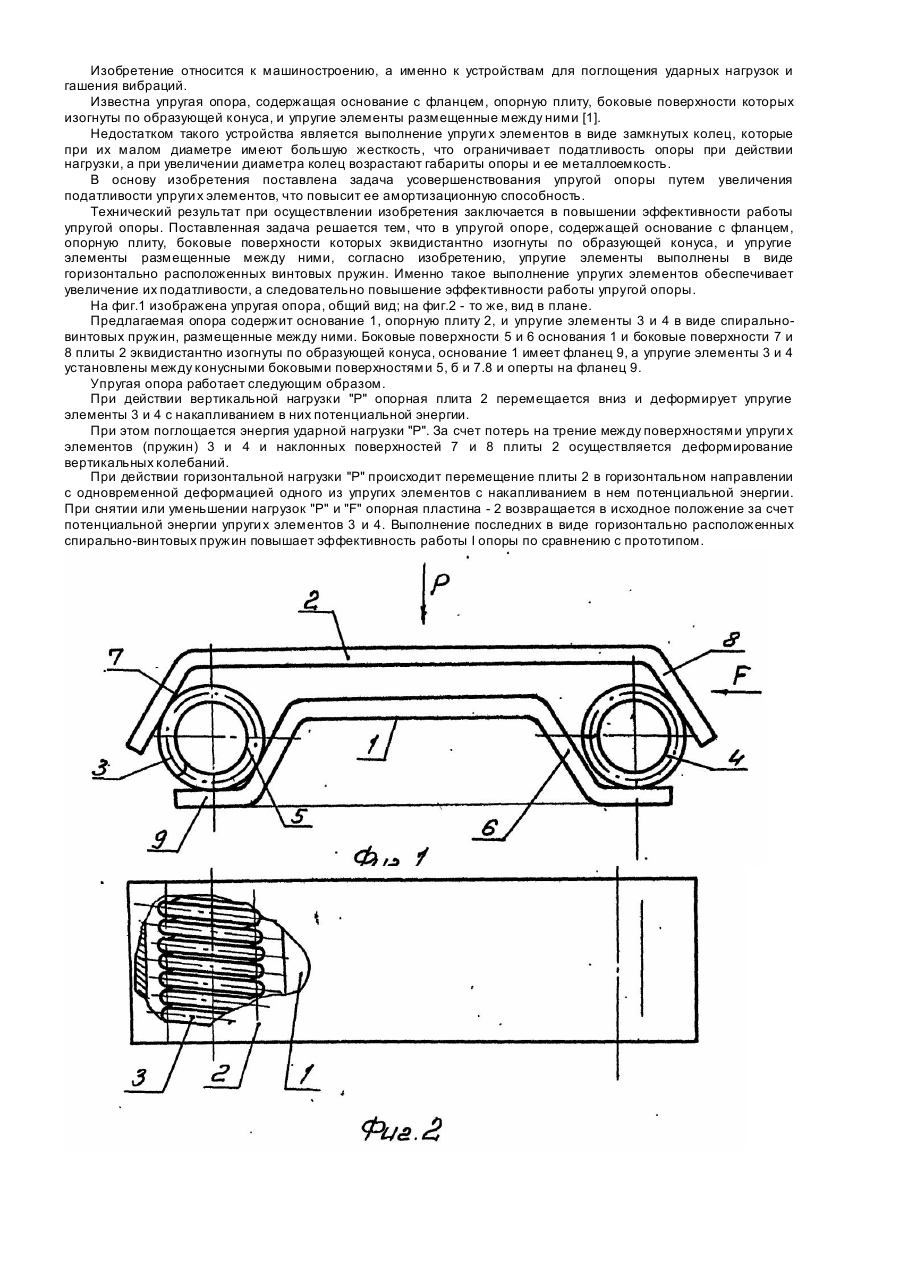
Пружна опора
Номер патенту: 1718
Опубліковано: 25.10.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 7/00
Формула / Реферат:
Упругая опора, содержащая основание с фланцем, опорную плиту, боковые поверхности которых эквидистантно изогнуты по образующей конуса, и упругие элементы, размещенные между ними, отличающаяся тем, что упругие элементы выполнены в виде горизонтально расположенных винтовых пружин.
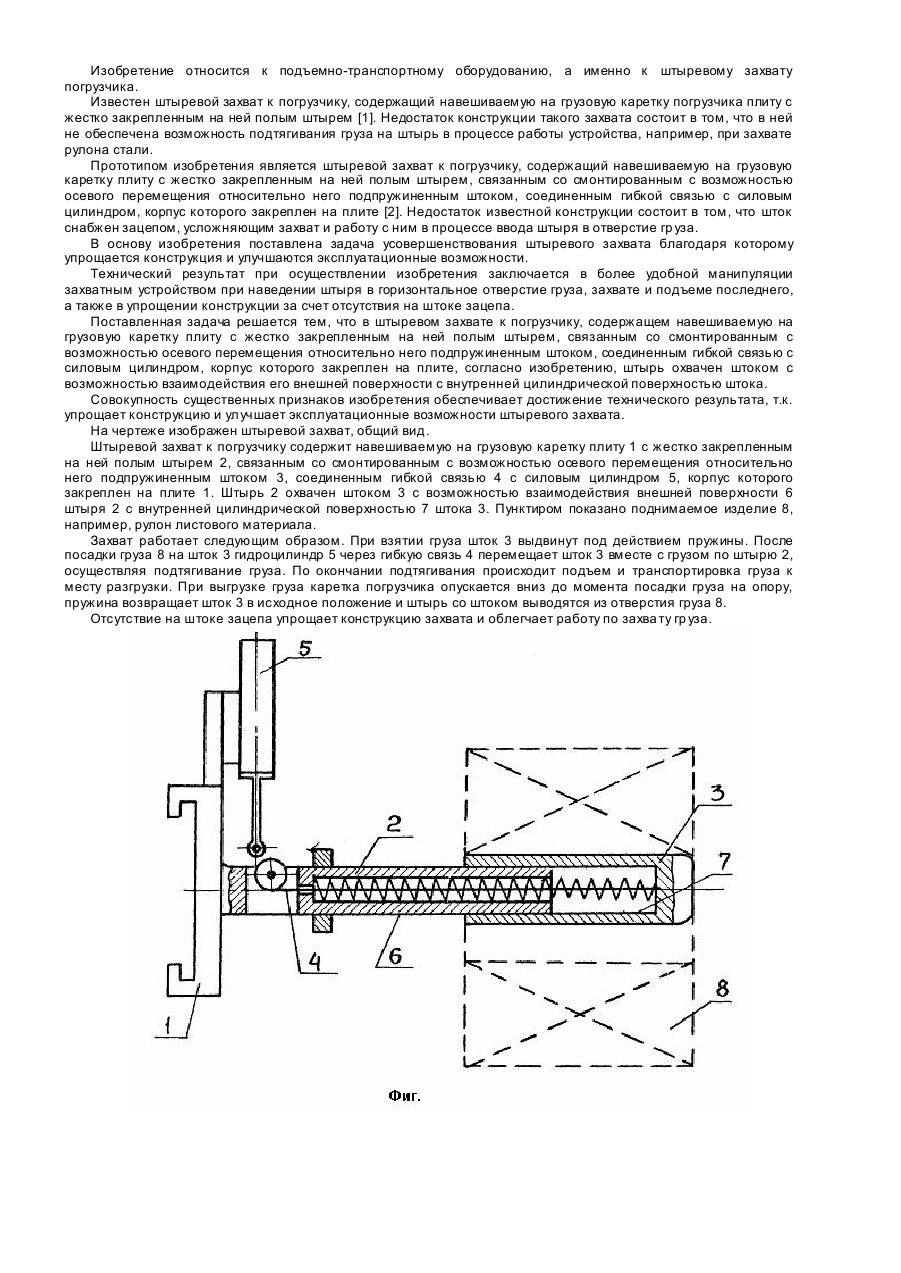
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: захват, навантажувача, штирьовий
Формула / Реферат:
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Попередній патент: Спосіб одержання лужногалоїдних кристалів
Наступний патент: Спосіб вирощування редьки олійної на корм